


Construye un robot de batalla controlado con un controlador PS2
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Herramientas y máquinas necesarias
| ||||
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Creamos robots de batalla utilizando Arduino UNO y otras piezas asequibles. Estos robots de batalla se hicieron en un club de robótica para estudiantes de quinto a octavo grado en Trivium Personalized Learning Public Charter School. Fue una forma divertida para que los niños aprendieran sobre Arduino y la robótica.
Vea "ESQUEMAS" para ver diagramas visuales sobre cómo está todo conectado. Hay diagramas para la placa del motor, el protector del sensor, el controlador PS2 y también un motor adicional conectado a una placa de pan para un flipper / spinner. El flipper / spinner está programado para activarse cuando se presiona el botón X en el controlador de PS2.
Intentamos utilizar suministros asequibles y les dimos a los niños libertad creativa sobre cómo diseñar sus robots de batalla. Usamos piezas que no requerían soldadura, lo que facilita el montaje para los principiantes.
Coroplast
Coroplast se utilizó para construir los cuerpos. Es asequible, más resistente que el cartón y bastante fácil de cortar y doblar.
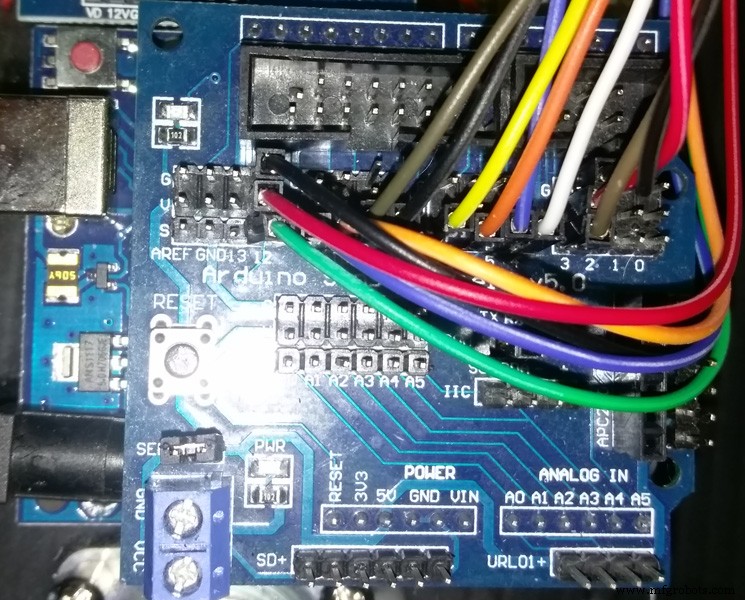
Arduino UNO y protector de sensor
Usamos el protector del sensor UNO R3 para que los niños pudieran conectar las piezas más fácilmente. Colocas este escudo en la parte superior del Arduino y está listo para usar.
Placa de controlador de motor
Usamos este protector de controlador de motor para facilitar que los niños conecten sus motores.
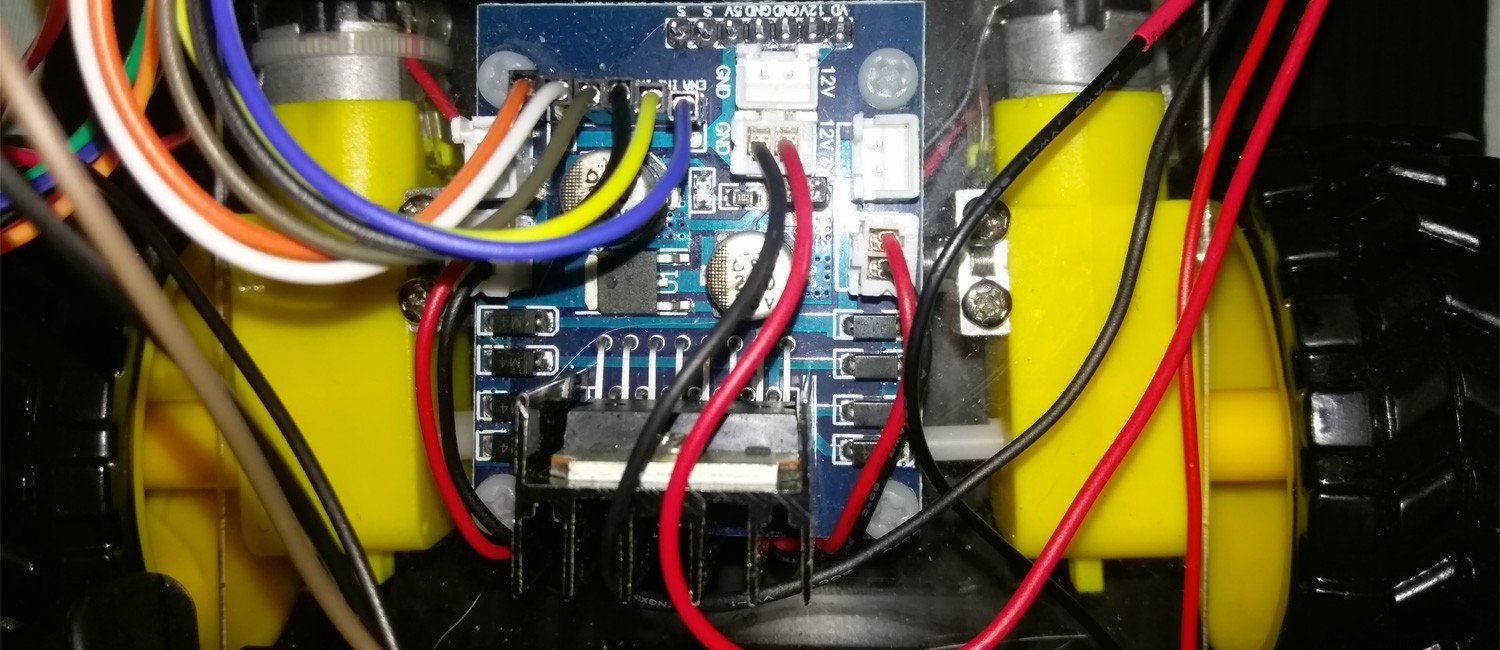
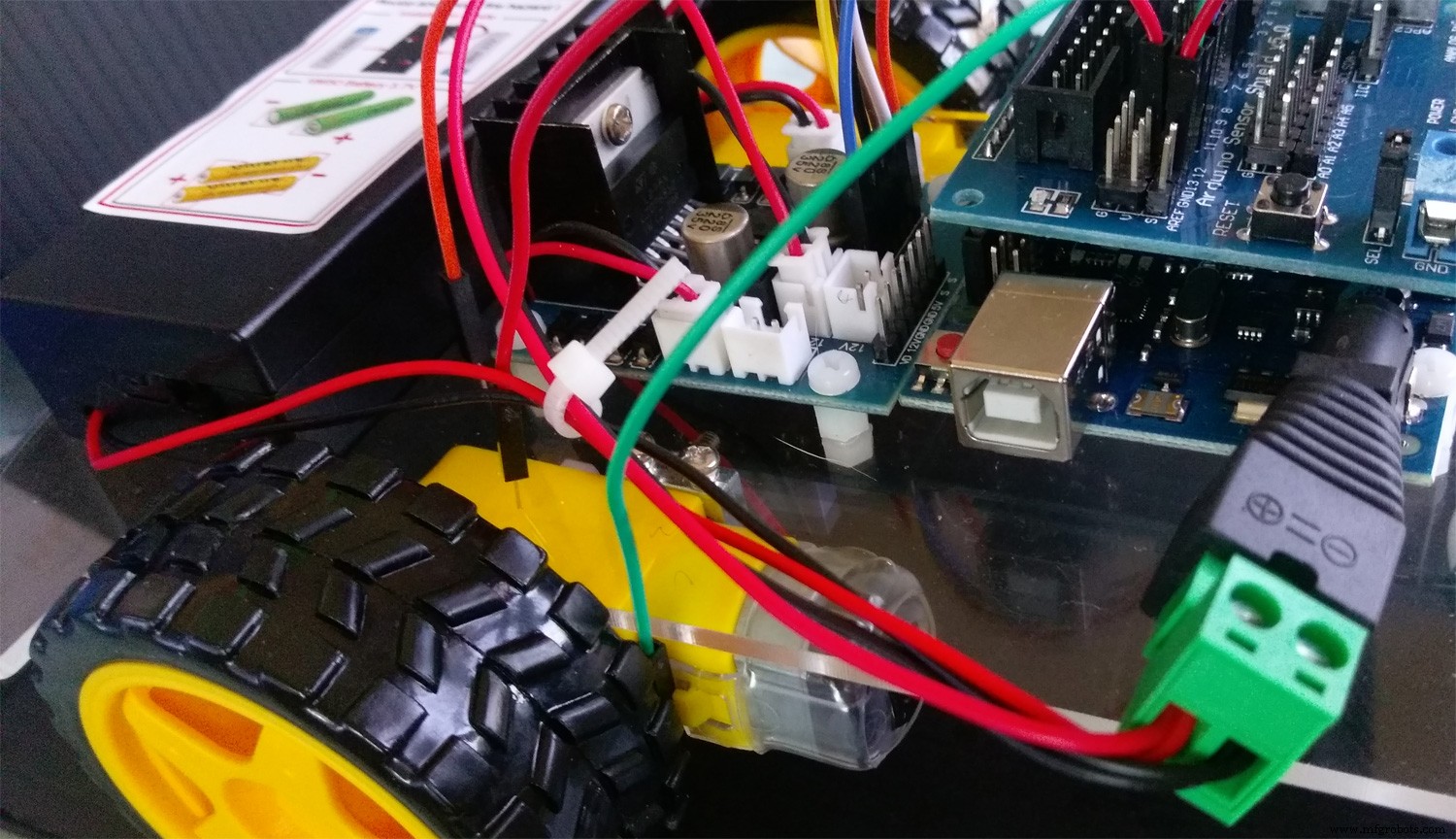
Para ahorrar costos, hicimos nuestros bots 2WD con 2 motores traseros y una rueda giratoria delantera. Sin embargo, el protector del controlador del motor admite 4WD, por lo que puede ensamblar fácilmente 2 motores más para el frente.
Caja de batería 18650
Elegimos estos estuches de batería porque tenían cables de 6 ", lo que facilita la conexión al Arduino.
Mando PS2
También conectamos los bots a un controlador de PS2 que se conectaba a través de Bluetooth.
Hay tutoriales que le enseñarán cómo modificar un controlador de PS2 existente para usar con su bot, pero usamos uno que obtuvimos de eBay que ya fue modificado. Hay un enlace a este controlador debajo de los componentes y suministros.
Otros suministros
También usamos cables de puente (macho / macho y hembra / macho), cinta adhesiva, tornillos, tuercas, pernos, tacos de madera, cinta de doble cara y cinta de velcro para ensamblar las piezas.
Además, imprimimos en 3D algunas piezas personalizadas que se utilizaron para aletas, ruedas giratorias y conectores de motor. Hay enlaces a los archivos STL para uno de los giradores y los conectores del motor en "PIEZAS PERSONALIZADAS Y CERRAMIENTOS".
¡Fue muy divertido construir estos robots de batalla! Nos encantó ver algunos de los conceptos que se les ocurrieron a los niños usando los suministros limitados que se les dio. Fue genial ver el progreso que hicieron mientras probaban sus bots en la batalla e hicieron cambios en función de dónde vieron las debilidades.

Vídeos de batalla
- Vea el cableado y los diagramas aquí
- Descargue el código aquí
- Descargue las piezas impresas en 3D aquí
- Obtenga una lista de las piezas utilizadas aquí
Código
Battlebot con controlador PS2
Código que te permite controlar el robot de batalla con un controlador de PS2Piezas y carcasas personalizadas
Esta es una ruleta impresa en 3D que uno de los estudiantes creó y que se adjuntó a uno de los motores. Se activa cuando se presiona el botón X del controlador de PS2. Esta es una pieza de conector impresa en 3D que usamos para unir a los extremos de los motores para que podamos conectar fácilmente tacos a ellos. Paquete de 12 piezas de conector impresas en 3D que usamos para sujetar a los extremos de los motores. Use esto si desea imprimir muchos de estos para una clase; de lo contrario, use Motor Connector - Single Piece .stl para imprimir solo 1.Esquemas
Este es el cableado de la placa del motor. Muestra cómo están conectados los motores a la placa del motor y también cómo están conectados los cables desde la placa del motor al blindaje del sensor.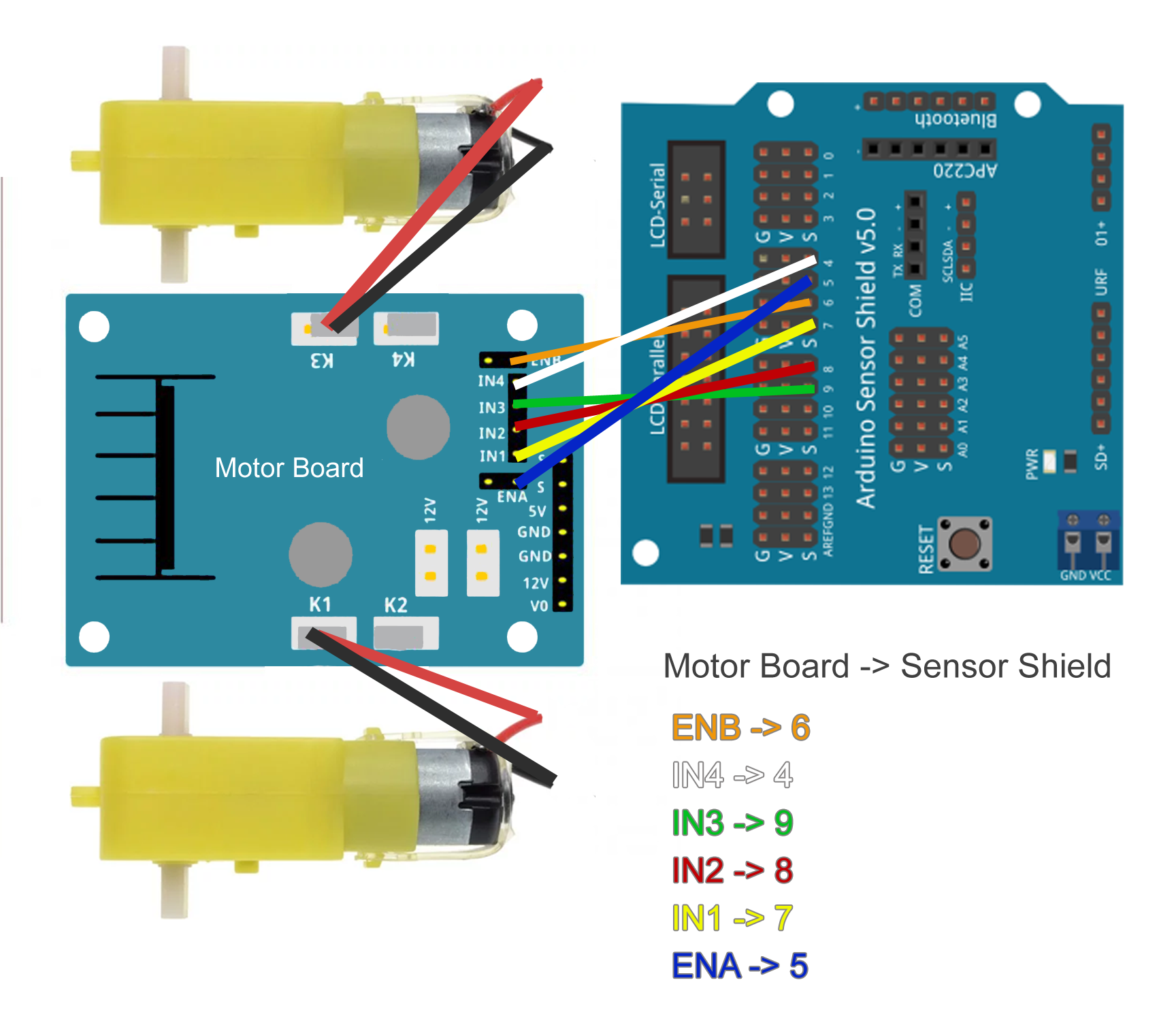 Diagrama que muestra cómo conectar el cableado bluetooth hasta el protector del sensor.
Diagrama que muestra cómo conectar el cableado bluetooth hasta el protector del sensor. 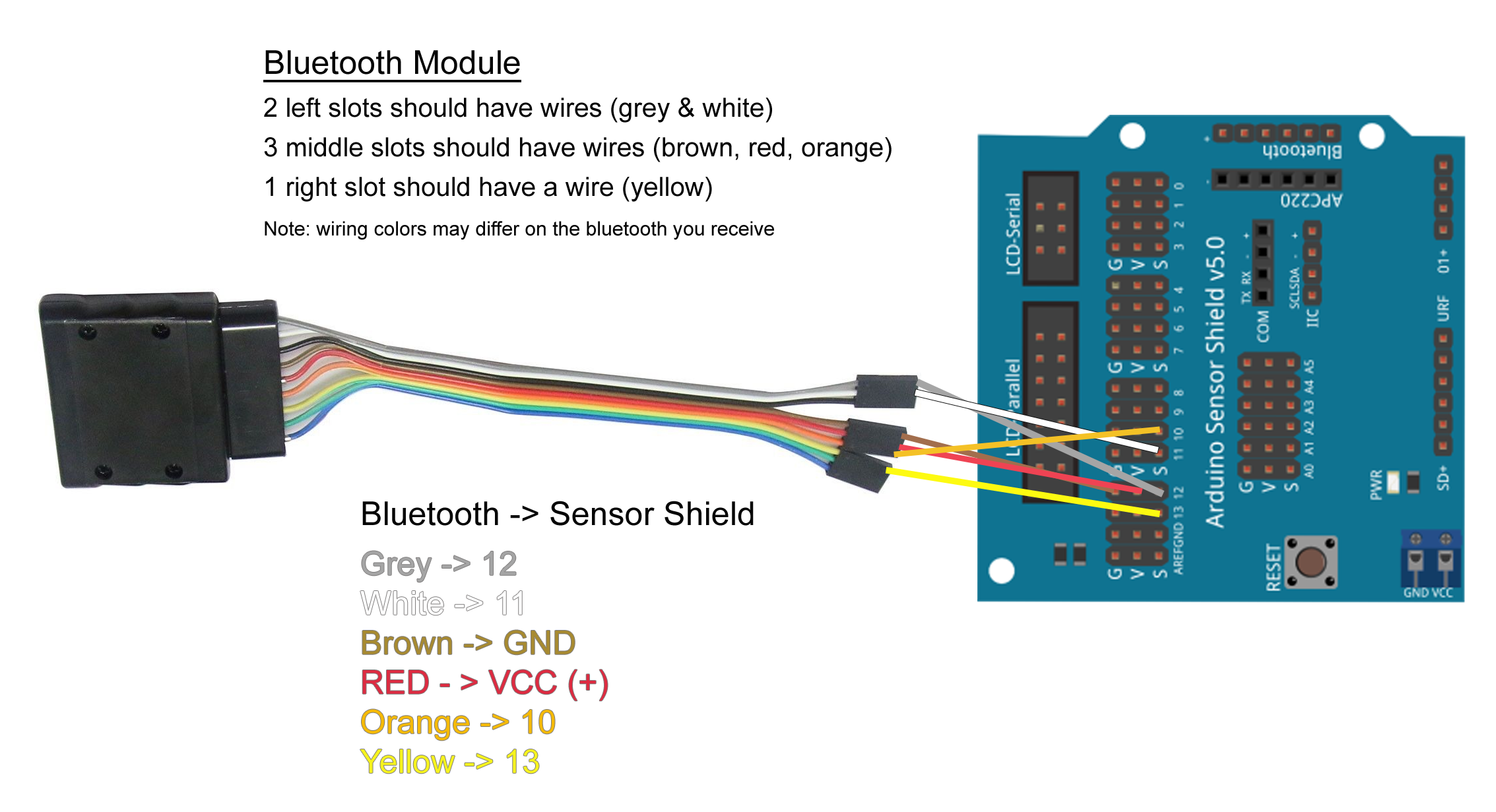 Este es un motor adicional que se agregó para activar un flipper cuando se presiona el botón X de PS2.
Este es un motor adicional que se agregó para activar un flipper cuando se presiona el botón X de PS2. 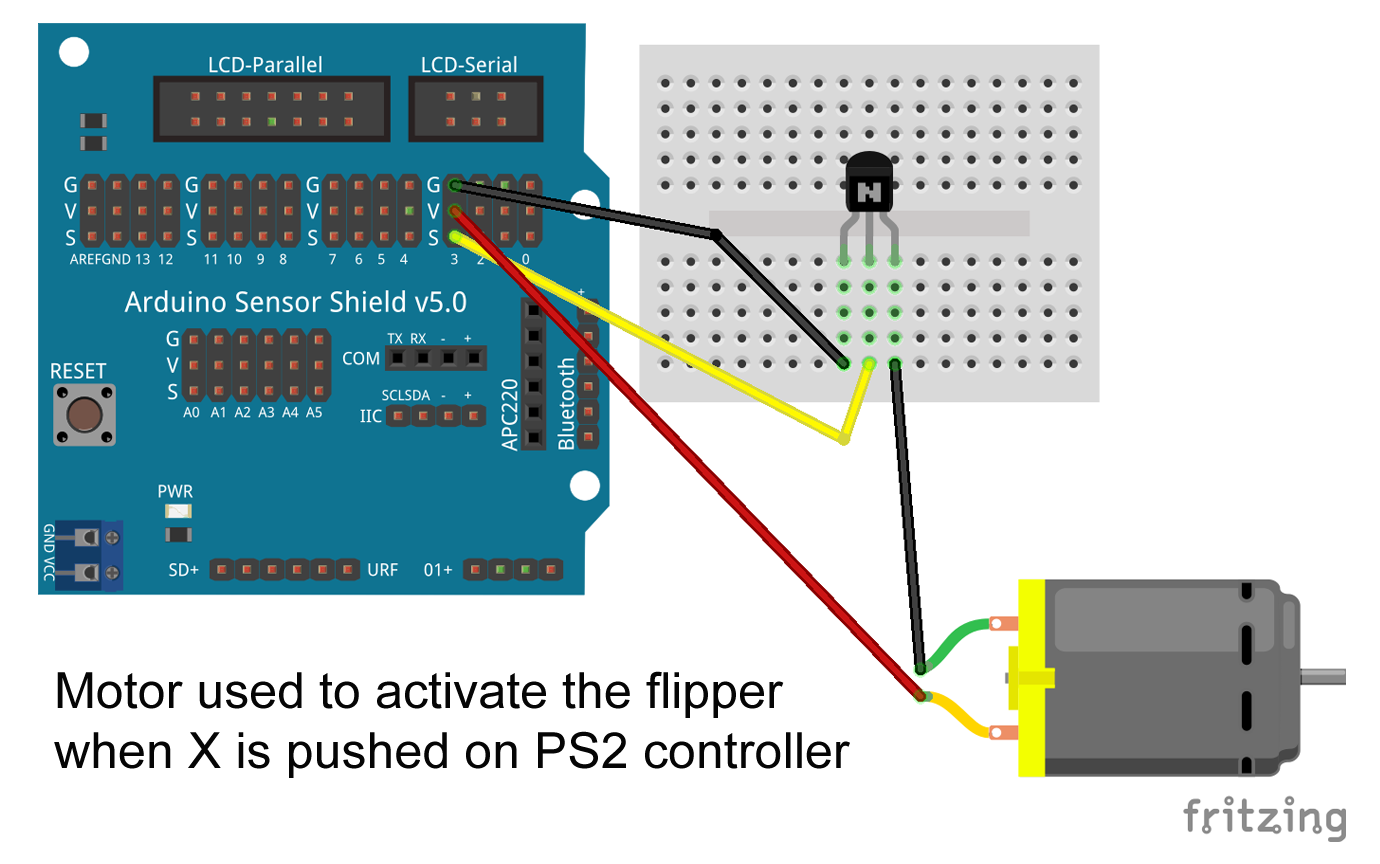
Proceso de manufactura
- 433MHz Smart Home Controller con Sensorflare y RaspberryPi
- Controlador de riego IOT Win10 con sensores de humedad
- Uso de la placa Pioneer de PSoC 6 con el escudo complementario de Pioneer IoT
- Cree su robot de transmisión de video controlado por Internet con Arduino y Raspberry Pi
- Construcción de Squid Games Doll usando Arduino UNO
- Controlador DMX operado por la web
- Reloj Arduino con tiempos de oración islámicos
- Unopad - Controlador MIDI Arduino con Ableton
- Juguete controlado por Android con Raspberry Motor Shield
- Control de ventilador PWM de 4 pines y 25 kHz con Arduino Uno
- Construcciones de varias etapas con contenedor