


Comedero para mascotas con control remoto
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
| ||||
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
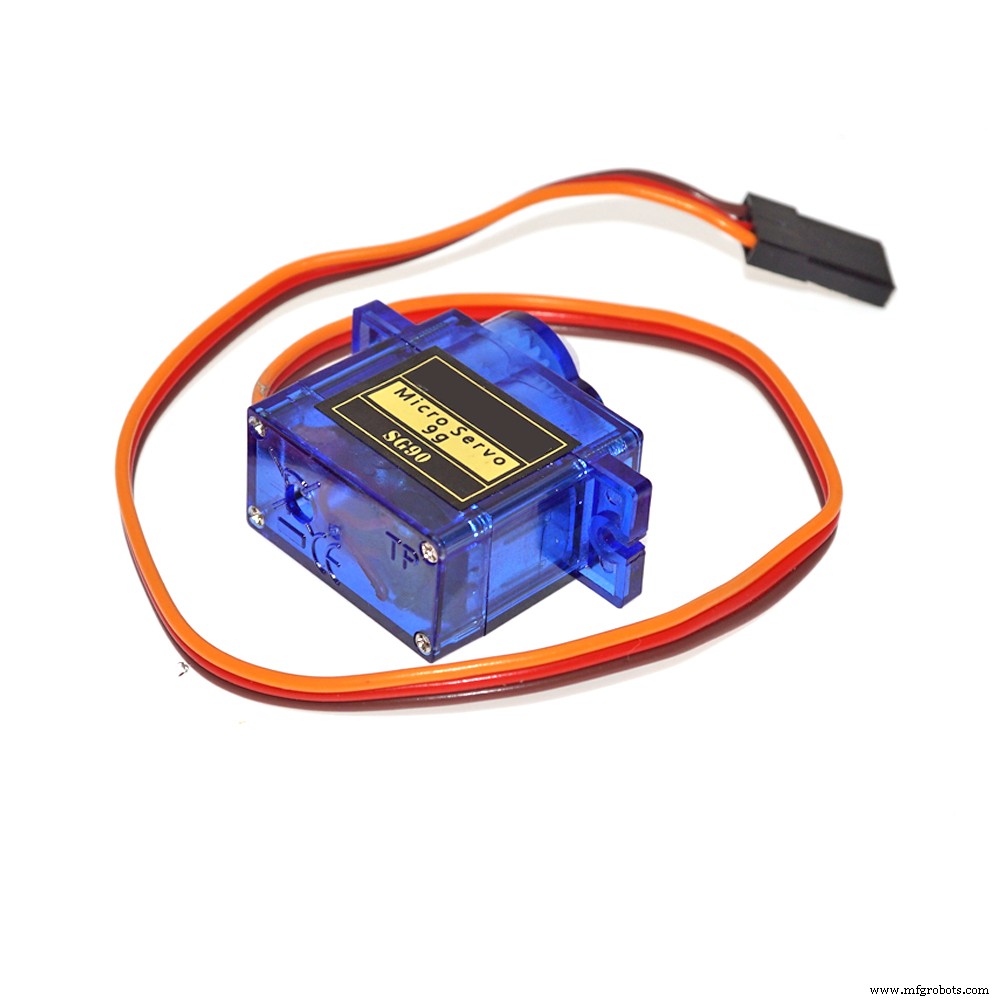
Con este sencillo proyecto de Arduino puedes alimentar a tu mascota con un mando a distancia. Todo lo que necesitas es una placa Arduino Uno (o similar), una botella de plástico, un servomotor (no tiene que ser muy potente), un control remoto de TV, un receptor de infrarrojos (TS0P1738) y un pequeño trozo de cartón.
¡Empecemos!
Instalación de la biblioteca de infrarrojos:
Lo primero que debemos hacer al asociarnos con arduino es descargar la biblioteca IR.
Descargue la biblioteca de infrarrojos desde el siguiente enlace e instálela:https://github.com/z3t0/Arduino-IRremote
Si no sabe cómo instalar una biblioteca, siga el enlace a continuación:https://www.arduino.cc/en/guide/libraries
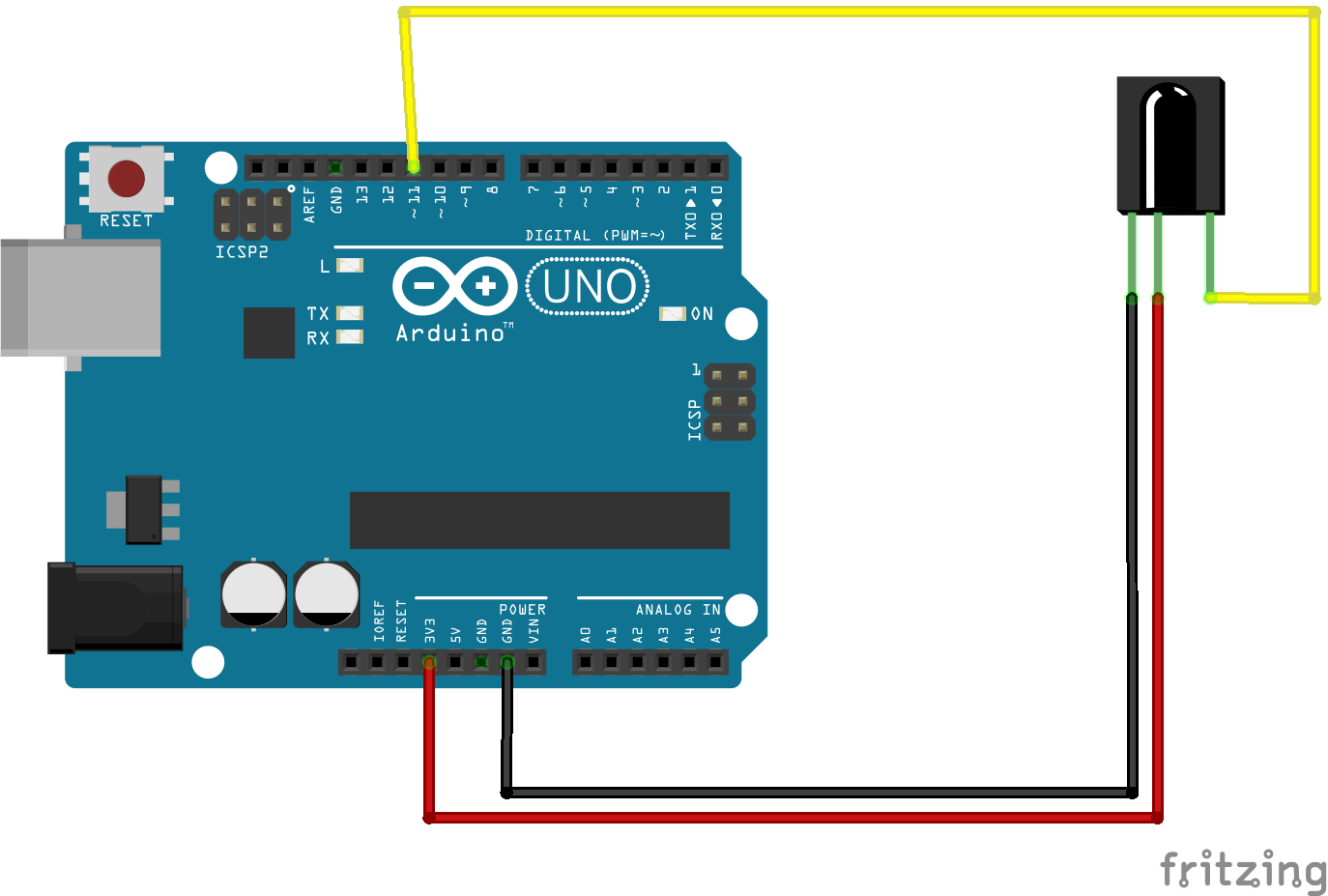
Decodificación de señales de infrarrojos:
Primero debe conectar las partes según el diagrama de circuito dado:
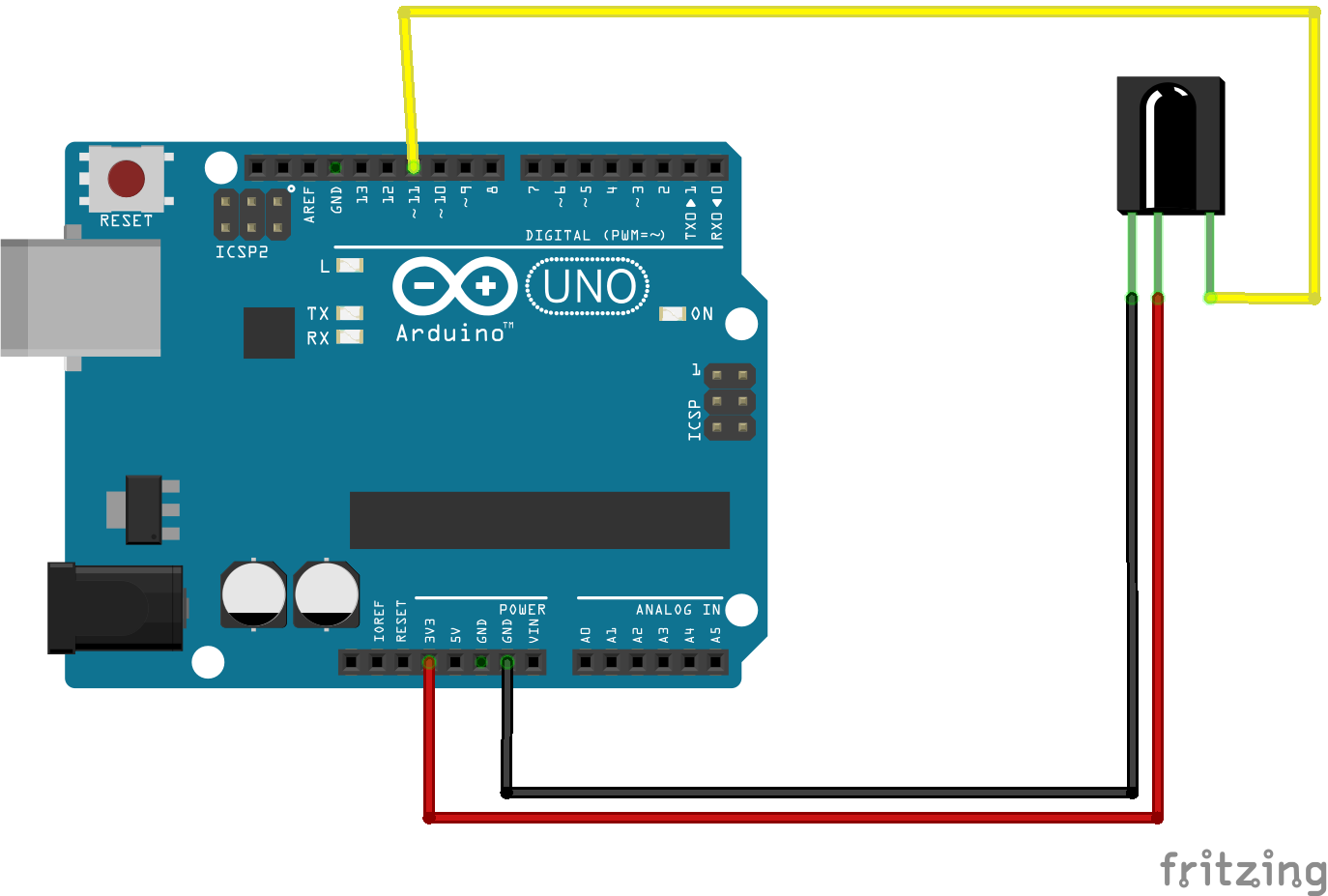
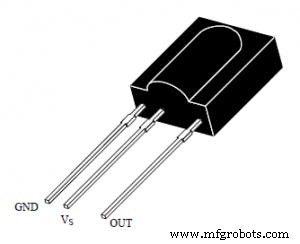
Puede retirar el Pin de TSOP1738 a continuación:
Utilice el siguiente código para decodificar el mando a distancia por infrarrojos:
/ * Los pines del sensor IR están conectados a Arduino de la siguiente manera:Pin 1 a Vout (pin 11 en Arduino) Pin 2 a GNDPin 3 a Vcc (+ 5v de Arduino) * / # incluye int IRpin =11; IRrecv irrecv (IRpin); decode_results resultados; void setup () {Serial.begin (9600); irrecv.enableIRIn (); // Iniciar el receptor} void loop () {if (irrecv.decode (&results)) {Serial.println (results.value, DEC); // Imprime el Serial 'results.value' irrecv.resume (); // Recibe el siguiente valor}} - Abra Arduino IDE y cargue el código
- Abrir Serial Monitor
- Apunte su control remoto al sensor y presione cada botón
- Puede ver diferentes números para cada botón
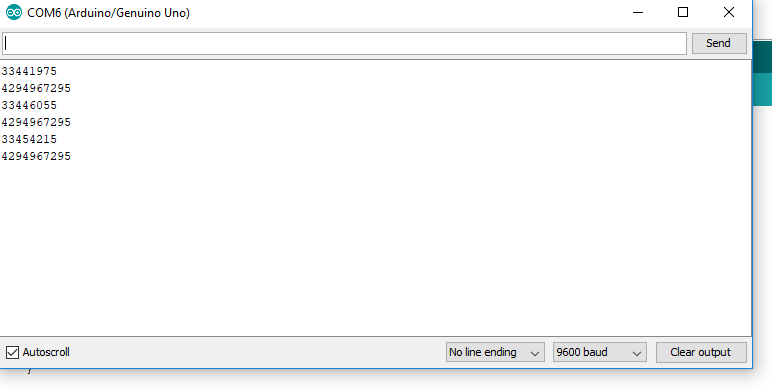
Considere dos botones cualesquiera y anote los valores decodificados. En mi caso, he elegido el botón de encendido y el botón de modo.
Obtuve los siguientes valores:
- Botón de encendido =33441975
- Botón de modo =33446055
Usaremos estos dos valores para controlar la rotación del servomotor. Debe agregar estos dos valores en el programa que se proporciona en el siguiente paso:

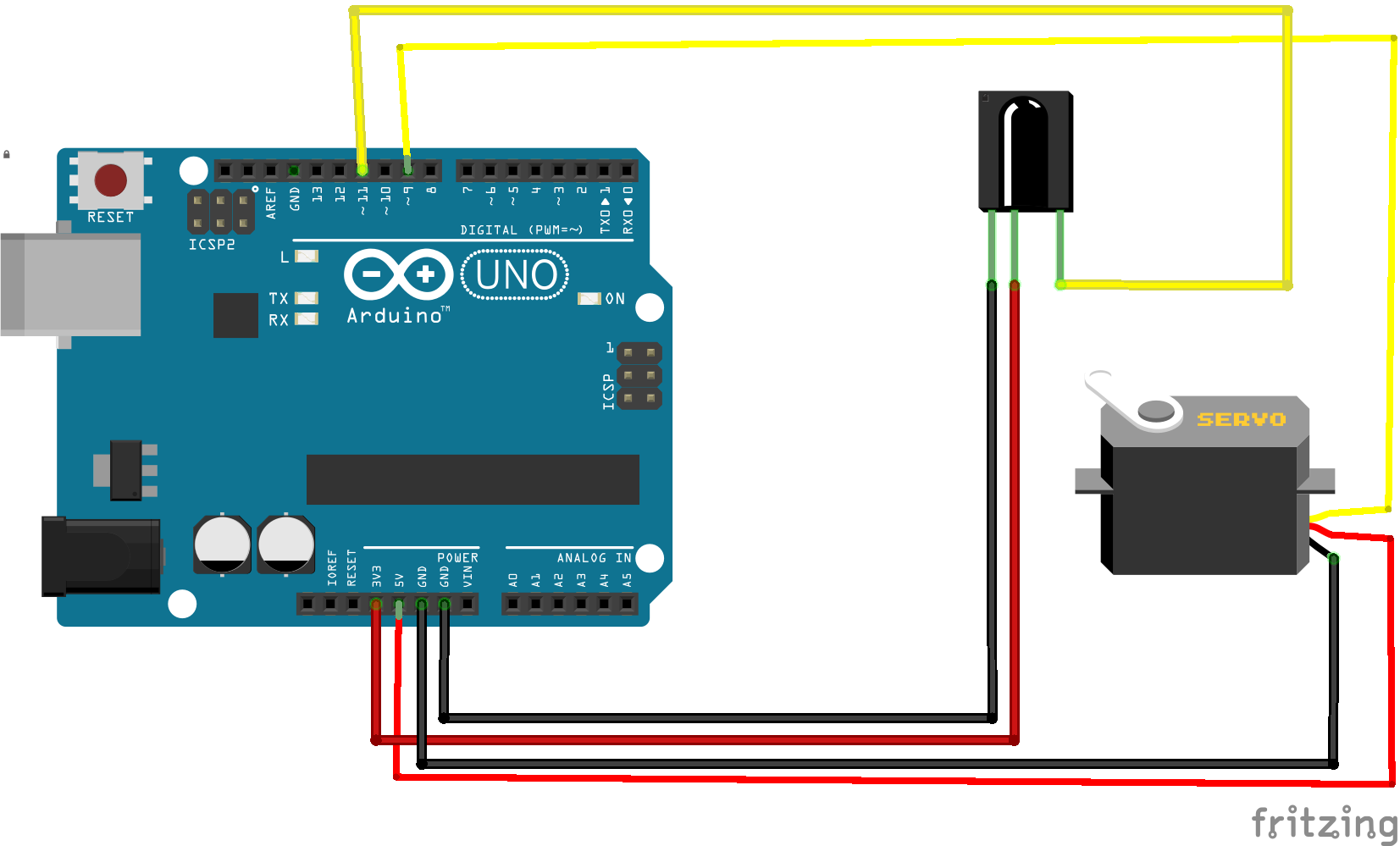
¡Configuremos el hardware final!
¡El circuito final!
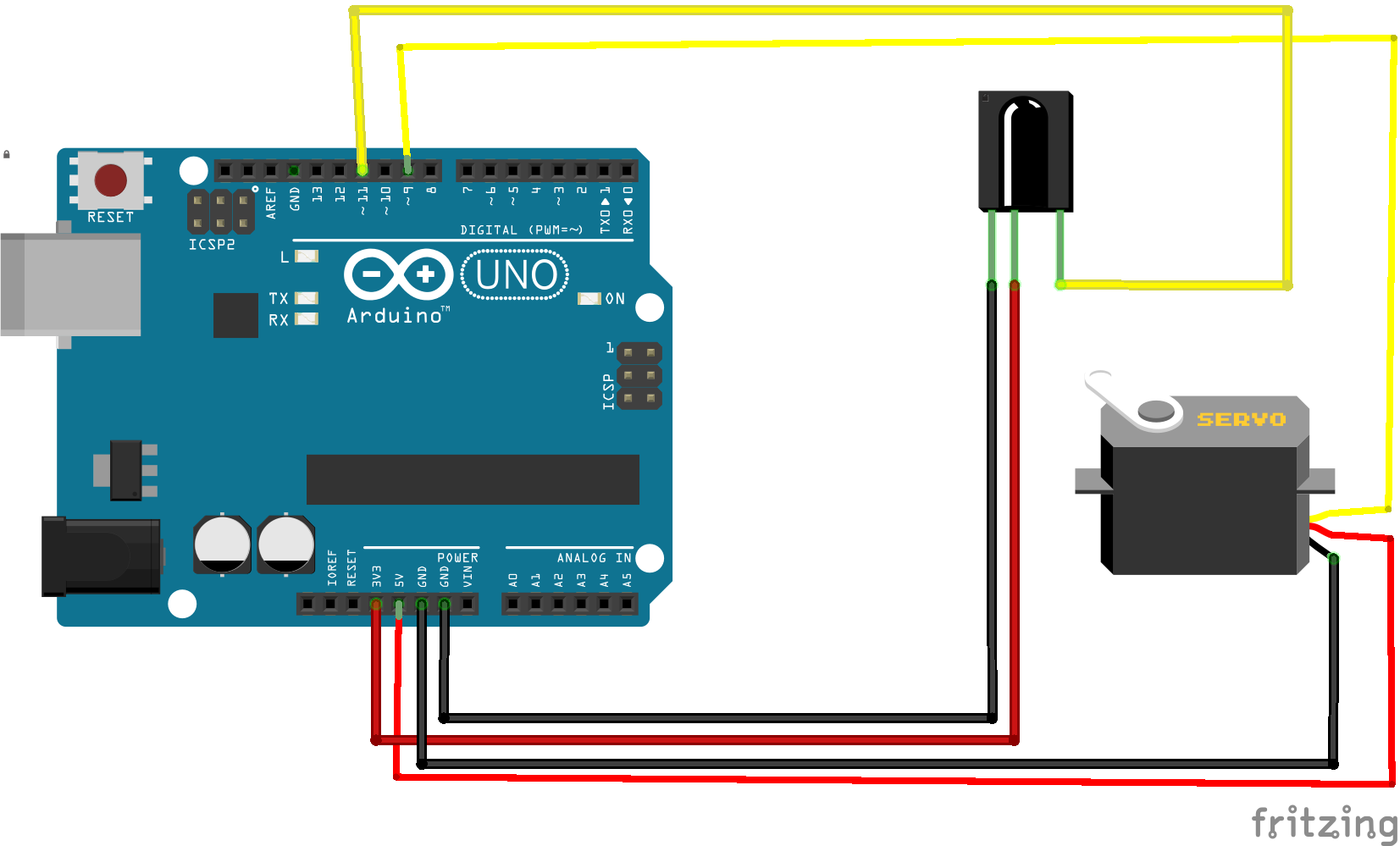
- Conecte el pin de señal del servo al pin # 9 en el arduino
- conecte los pines VCC y GND del servo a 5V VCC y GND en el arduino
- El servo se pegará a un extremo de la botella de plástico y rotará un trozo de cartón lo suficientemente pequeño como para cerrar la abertura de la botella y bloquear la comida.
- Si toda la configuración del hardware está conectada correctamente, simplemente puede compilar y cargar el siguiente boceto en la placa.
#include #include int IRpin =11; // pin para el sensor IR IRrecv irrecv (IRpin); decode_results resultados; Servo myservo; void setup () {Serial.begin (9600); irrecv.enableIRIn (); // Inicie el receptor myservo.attach (9); // conecta el servo en el pin 9 al objeto servo} void loop () {if (irrecv.decode (&results)) {irrecv.resume (); // Recibe el siguiente valor} if (results.value ==33441975) // cambia de acuerdo con el número de botón del control remoto IR {myservo.write (0); retraso (15); } if (results.value ==33446055) // cambia de acuerdo con el número de botón del control remoto IR {myservo.write (30); retraso (15); }} Ahora puede controlar la apertura del dispensador del comedero para mascotas con control remoto mediante este sencillo proyecto. :-)
¡Feliz fabricación!
Código
- Decode_IR
- IRremote_Servo_Control
Decode_IR Arduino
Use este código para decodificar el control remoto por infrarrojos/ * Los pines del sensor de infrarrojos están conectados a Arduino de la siguiente manera:Pin 1 a Vout (pin 11 en Arduino) Pin 2 a GND Pin 3 a Vcc (+ 5v de Arduino) * / # incluirint IRpin =11; IRrecv irrecv (IRpin); decode_results resultados; void setup () {Serial.begin (9600); irrecv.enableIRIn (); // Iniciar el receptor} void loop () {if (irrecv.decode (&results)) {Serial.println (results.value, DEC); // Imprime el Serial 'results.value' irrecv.resume (); // Recibe el siguiente valor}}
IRremote_Servo_Control Arduino
Agregue valor decodificado desde su control remoto en este código#include#include int IRpin =11; // pin para el sensor IR IRrecv irrecv (IRpin); decode_results resultados; Servo myservo; void setup () {Serial.begin (9600); irrecv.enableIRIn (); // Inicie el receptor myservo.attach (9); // conecta el servo en el pin 9 al objeto servo} void loop () {if (irrecv.decode (&results)) {irrecv.resume (); // Recibe el siguiente valor} if (results.value ==33441975) // cambia de acuerdo con el número de botón del control remoto IR {myservo.write (0); retraso (15); } if (results.value ==33446055) // cambia de acuerdo con el número de botón del control remoto IR {myservo.write (30); retraso (15); }}
Esquemas
Proceso de manufactura
- Ventilador de temperatura controlada
- Acuaponía controlada por Raspberry Pi
- Monitoreo remoto del clima usando Raspberry Pi
- Mando a distancia universal Raspberry Pi
- Botón de AWS IoT controlado por movimiento
- Monitor de frecuencia cardíaca remoto
- Interruptor de alimentación de CA controlado por SMS de Raspberry Pi / Hologram
- Robot controlado por Wifi usando Raspberry Pi
- ROObockey:Robot de hockey callejero asistido por objetivo y controlado a distancia
- ¿Qué es un alimentador de prensa?
- ¿Qué es un alimentador de barras neumático?