


Robot desinfectante con luces ultravioleta
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 |
Herramientas y máquinas necesarias
 |
|
Acerca de este proyecto
Introducción al robot
El robot germicida ultravioleta (Robot UV) es un robot teleoperado equipado con un sistema de luz ultravioleta. El sistema contiene un vehículo robot en movimiento y un controlador de estación terrestre (GCS). El operador puede controlar el robot usando el joystick del controlador de la estación terrestre (GCS) mientras observa la alimentación de la cámara del robot.
El robot puede desinfectar y matar enfermedades, virus, bacterias y otros tipos de microorganismos orgánicos dañinos en el medio ambiente, con luz ultravioleta, rompiendo su estructura de ADN. Actualmente, varios países han probado estos robots con éxito para desinfectar sus hospitales, transportes públicos, oficinas y otros lugares públicos. Hemos implementado este robot UV de una manera rentable para expandir el proceso de desinfección a lugares públicos.
¿Por qué no líquidos desinfectantes?

El método más común y popular para desinfectar lugares públicos es rociar líquidos desinfectantes que son líquidos a base de alcohol al 70%. Recientemente, la Organización Mundial de la Salud (OMS) ha anunciado que es realmente perjudicial utilizar líquidos desinfectantes con regularidad en lugares públicos. Esto puede causar problemas en el sistema respiratorio debido a su fuerte olor, causar irritación de la piel y puede provocar desequilibrios en el medio ambiente.
Además, este método está asociado con un enorme costo de material y mano de obra a diario.
Ventajas del robot UV
- Costo único (no es necesario volver a llenar el líquido de alcohol o cloro).
- Puede usarse para desinfectar superficies, trajes médicos, máscaras médicas y otros equipos médicos.
- Reducir el tiempo de desinfección en un 60% en comparación con los métodos de desinfección a base de líquidos. (El tiempo de secado es considerablemente alto cuando se usa en ambientes donde hay materiales de tela disponibles).
- Capacidad de uso para entornos con equipos electrónicos.
- Un operador puede cubrir un área grande. (No se necesitan varias personas como en aerosoles líquidos)
- Hemos probado y comprobado una tasa de desinfección del 99,997% para este robot en colaboración con un laboratorio de microbiología en una universidad local. (Explicado en la última sección)
Irradiación germicida ultravioleta (UVGI)
La irradiación germicida ultravioleta (UVGI) es un método de desinfección que utiliza luz ultravioleta de longitud de onda corta (ultravioleta C o UVC) para matar o inactivar microorganismos al destruir los ácidos nucleicos y alterar su ADN, dejándolos incapaces de realizar funciones celulares vitales. La UVC es absorbida por las bases de ARN y ADN y puede causar la fusión fotoquímica de dos pirimidinas adyacentes en dímeros unidos covalentemente, que luego se convierten en bases que no se emparejan.
La UVGI se utiliza en una variedad de aplicaciones, como la purificación de alimentos, aire y agua. La UVGI se puede utilizar para prevenir la propagación de ciertas enfermedades infecciosas. Las lámparas y LED de descarga de mercurio (Hg) de baja presión se utilizan comúnmente en aplicaciones de UVGI y emiten radiación ultravioleta C de onda corta (100-280 nanómetros), principalmente a 254 nm.
Cada tipo de microorganismo requiere una dosis diferente de luz ultravioleta para inactivar su funcionalidad. Teniendo en cuenta la situación de Covid-19, aquí se considera la inactivación del mismo virus con luz ultravioleta. En la mayoría de los trabajos y artículos de investigación, los grupos de investigación han mencionado la luz ultravioleta necesaria para el proceso de esterilización en términos de "Joule por metro cuadrado" o "Joule por centímetro cuadrado". Pero al considerar los parámetros y especificaciones de la luz ultravioleta, los fabricantes han dado la intensidad de la luz ultravioleta en términos de "Microvatios (uW) por centímetro cuadrado" a una distancia de 1 metro.
La unidad "Watt (W)" representa la energía emitida en un período de un segundo. Microwatt por centímetro cuadrado representa la energía que pasa a través de un área de un centímetro cuadrado en un segundo.
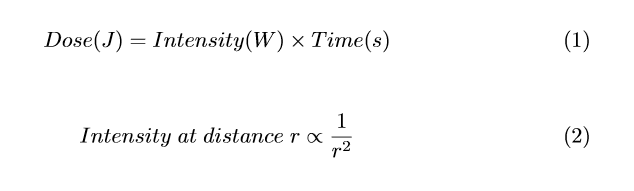
Ecuación 1 muestra la relación entre la dosis y la intensidad. Concluye que se pueden lograr diferentes dosis variando el tiempo de exposición a la misma fuente de luz ultravioleta.
La relación entre la intensidad UV y la distancia se muestra en la Ecuación 2. De acuerdo con eso, se puede concluir que la intensidad de los rayos UV disminuye con la distancia a la fuente de luz.
Según Wikipedia, una dosis de 8 mJ puede inactivar la mayoría de los virus.
Comprender la funcionalidad del robot
El sistema en general es un poco complejo, ya que hemos agregado algunas funcionalidades y características de seguridad para cumplir con los estándares de la industria. Antes de explicar el procedimiento de implementación, es bueno comprender cómo funciona el sistema.
El robot tiene 3 componentes principales.
1. El vehículo terrestre

Esta pieza se mueve mediante dos ruedas accionadas por motorreductores de CC (un robot de accionamiento diferencial). Hay dos ruedas giratorias en la parte delantera y trasera para mantener el equilibrio. Hemos colocado el sistema de control electrónico y la batería, que es una batería de plomo ácido de 12V 35Ah dentro del vehículo terrestre.
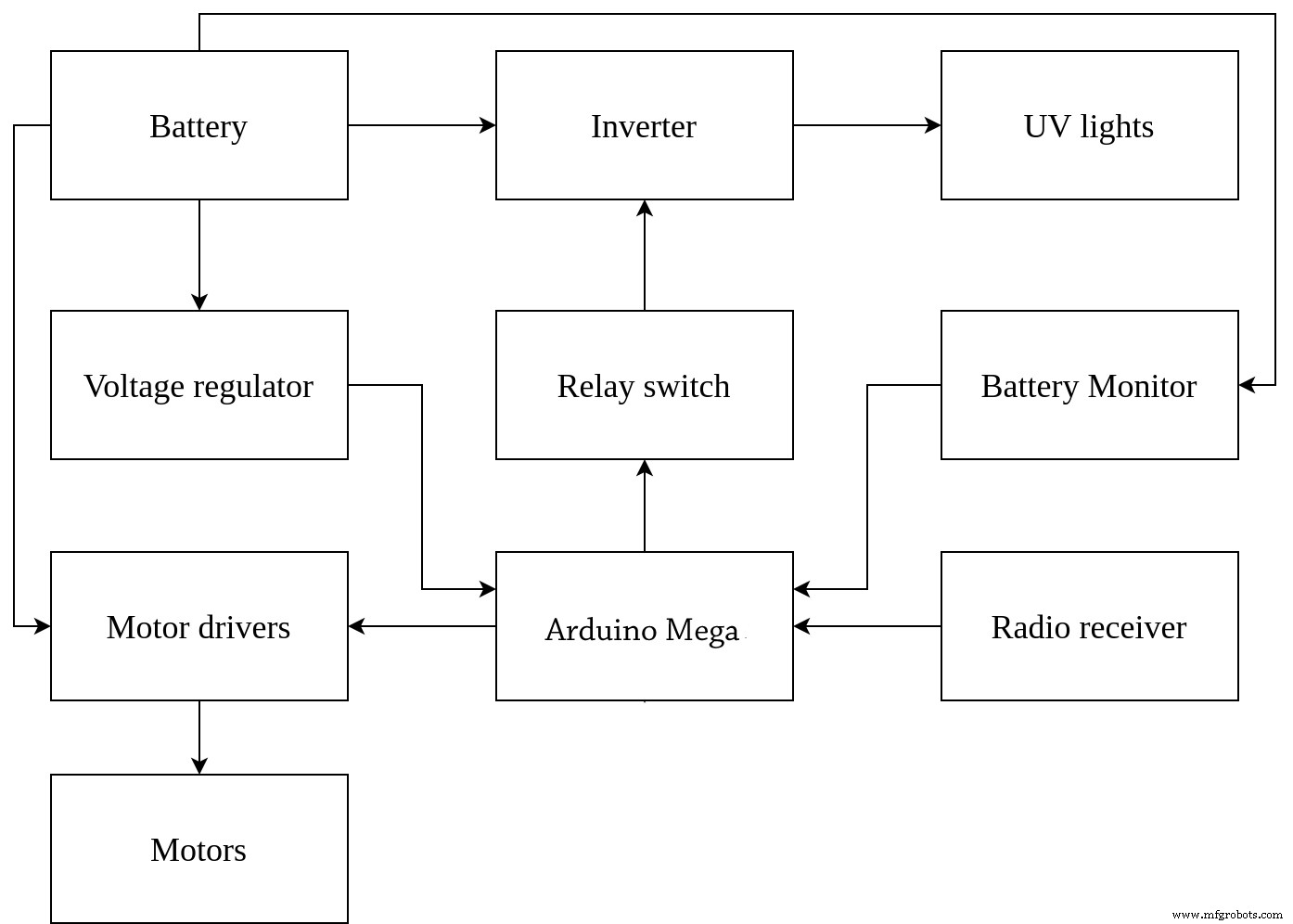
Arduino Mega se alimenta con la batería principal a través de un módulo regulador de voltaje para reducir el voltaje de 12V a 5V. Un receptor de radio RC de cuatro canales con salidas PWM está conectado a la placa Mega. Los motores se manejan a través de un controlador de motor de puente H de doble canal que está conectado a la placa Arduino. Un inversor se conecta entre las luces UV y la batería y se controla mediante un interruptor de relé conectado a la placa Arduino.
2. La torre de luz ultravioleta
Hemos utilizado bombillas UV fluorescentes que requieren una unidad de balasto electrónico independiente para encender la bombilla. La torre de luz contiene 6 bombillas UV que se colocan alrededor de un cilindro de aluminio que está hecho de una hoja de aluminio al enrollarlo. Este cilindro de aluminio actúa como reflector de los rayos UV.
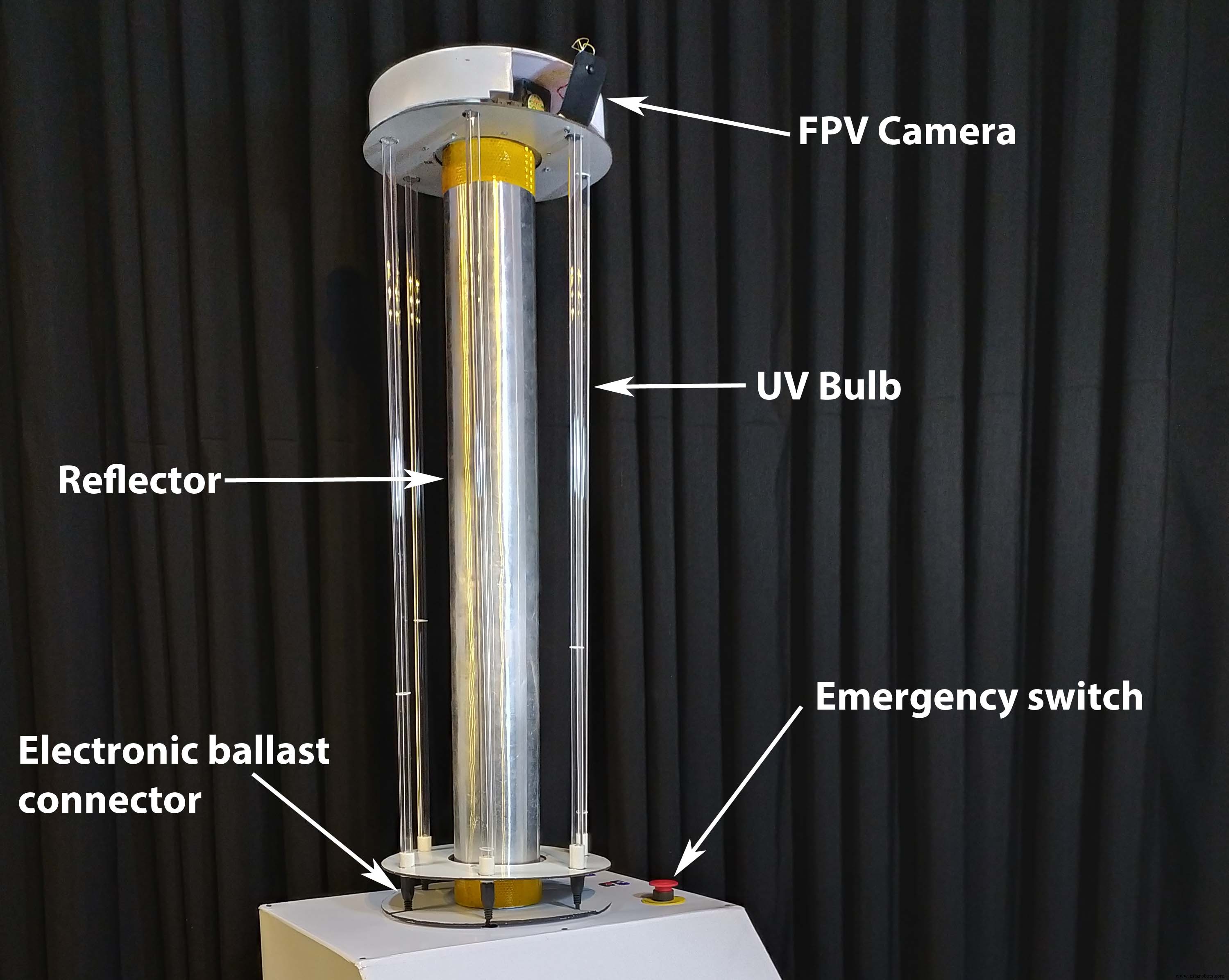
Todos los balastos electrónicos se colocan dentro del cilindro de aluminio. En la parte superior de la torre, hay una cámara FPV y un transmisor FPV para transmitir la señal de video al GCS. La torre UV está fijada en la parte superior del vehículo terrestre.
3. Controlador de estación terrestre

Este es el control remoto del robot. La pantalla muestra los comentarios de la cámara recibidos del robot. El joystick se utiliza para mover el robot. Las luces UV se pueden encender y apagar usando el interruptor UV. El interruptor de armado actúa como interruptor de seguridad. Reduce todas las funcionalidades del al encenderlo.
Encendido de las luces ultravioleta

Para nuestro robot, hemos seleccionado 6 bombillas UV con las siguientes especificaciones.
- Potencia:55w
- Longitud de onda:254 nm
- longitud:890 mm
- diámetro del tubo:15 mm
- tipo:extremo único de 4 pines
Estas no son especificaciones estrictas excepto la longitud de onda. La unidad de balasto electrónico está conectada a los 4 pines de la bombilla UV. Las bombillas UV se encenderán cuando se suministre energía al balasto electrónico.
Sistema de video FPV
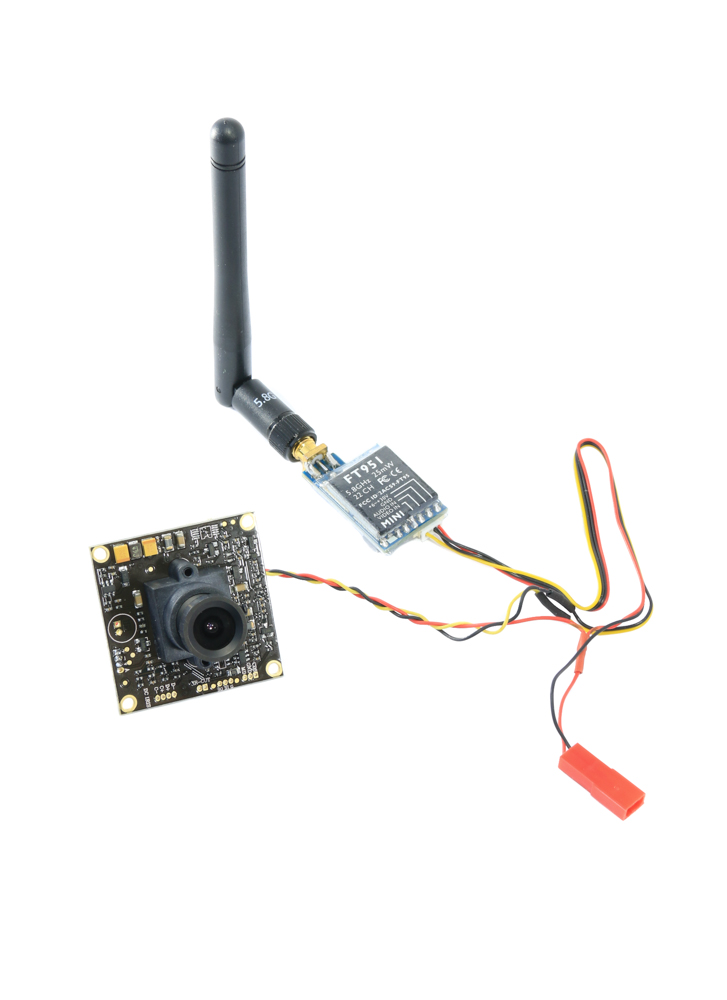

FPV Los sistemas de video se utilizan principalmente en drones para obtener una vista aérea. En nuestro caso, el uso de un sistema FPV hace que sea fácil obtener la alimentación de video del robot sin ningún componente de programación o soldadura. El robot tiene una cámara y un transmisor de video. Solo tenemos que conectar la energía a este sistema y comenzará a transmitir la señal de video usando 5.8GHz.
El GCS tiene la pantalla LCD con un receptor de video integrado de 5.8GHz. Una vez que encienda la pantalla, comenzará a mostrar la transmisión de la cámara.
Construyendo el vehículo terrestre
La estructura principal está hecha con barras de caja de acero de 0.75 '. A continuación se muestra el diseño utilizado para nuestro robot, pero no se limite a él. Cambie el diseño según sus requisitos.
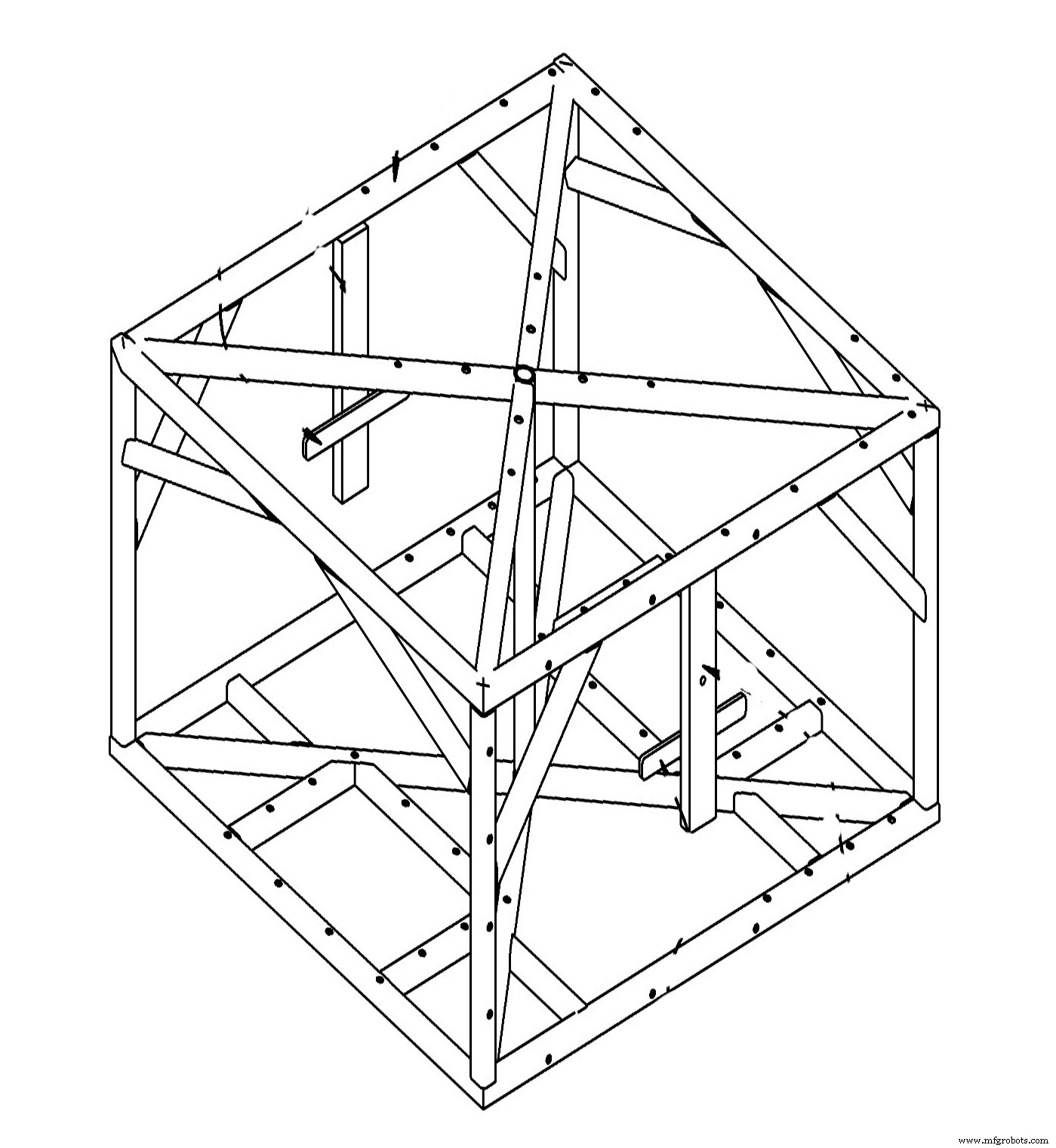
El marco debe tener espacio y un mecanismo para montar dos motores y dos ruedas giratorias en la parte inferior. Dentro de la estructura, debe haber un mecanismo para bloquear la batería de plomo-ácido. En nuestro robot, hemos utilizado placas de revestimiento para cubrir el marco.
Los cables de los dos motores están conectados a los pines de salida del controlador del motor. Este procedimiento se puede encontrar fácilmente en Internet, por lo tanto, no pretende describir todo el procedimiento.
El esquema del sistema de control electrónico se adjunta al final. Canal 1:los pines de señal PWM del canal 4 del receptor RC están conectados a la placa Arduino desde el pin 18 al 21. Cada canal se configura de la siguiente manera en el código. Puede cambiarlo como desee.
- Canal 1:interruptor UV
- Ch 2 - Interruptor de armado del robot
- Capítulo 3 - Comandos de movimiento hacia adelante / hacia atrás
- Canal 4 - Comandos de giro a la izquierda / derecha
Esto también se puede cambiar al construir el GCS.
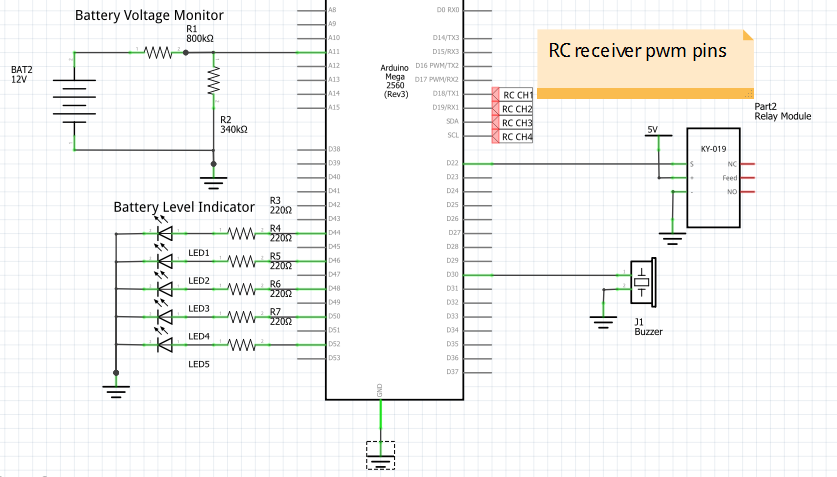
Los pines del controlador del motor están conectados al pin 3 - 11 de Arduino como se muestra en el esquema.
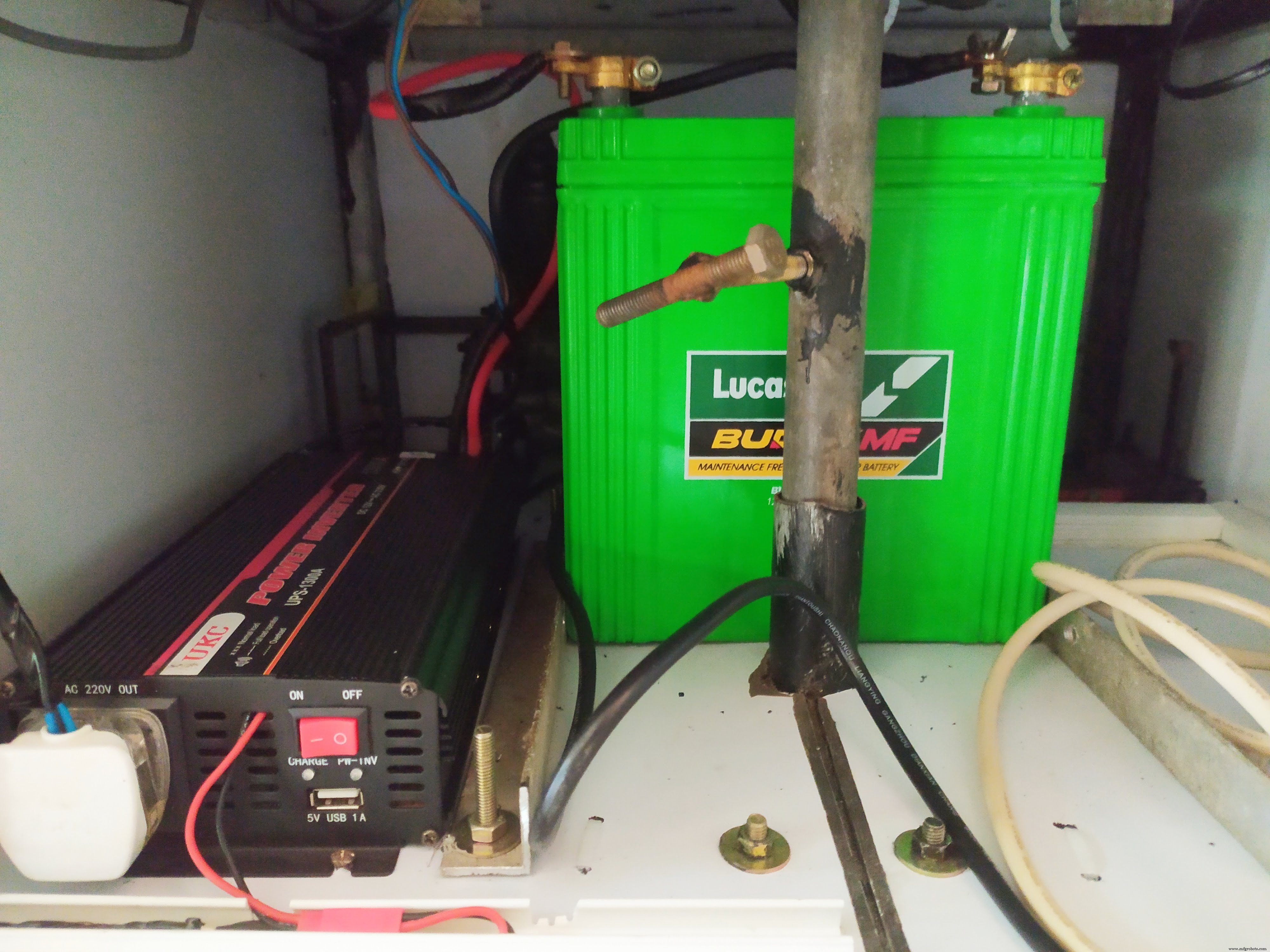
Para convertir 12v en AC 230V para encender las luces UV, aquí se usa un circuito inversor. Hemos comprado una unidad inversora disponible comercialmente con un cargador incorporado. Esto ayuda a evitar la complejidad del sistema electrónico al permitirnos cargar la batería de plomo-ácido utilizando los enchufes existentes.

En nuestro caso, hemos utilizado un inversor de onda sinusoidal modificada que tiene una eficiencia de aproximadamente el 70%. Para alimentar todos los balastos electrónicos con una eficiencia del 70%, la potencia requerida del inversor es de 470W. Con todos los márgenes de seguridad, compramos un inversor de 1 kW.
Los terminales de la batería están conectados a la entrada de 12 V y los balastos E. están conectados a los puertos de salida de CA. Se quita el interruptor de encendido / apagado. Hay 3 cables disponibles en el interruptor; cable común, cable de tierra y el cable de alimentación. Estos 3 cables están conectados al interruptor de relé de la siguiente manera para controlar las luces UV de la placa Arduino.
- Cable común -> Común
- Cable de tierra -> NC
- Encender el cable -> NO
Hemos incluido un interruptor de encendido del sistema, un interruptor de encendido UV y un interruptor de corte de emergencia para cumplir con los estándares industriales del robot.
Construyendo la torre de luz ultravioleta
La parte media de la torre contiene una lámina de aluminio. Se enrolla una hoja para hacer un cilindro con un diámetro de 15 cm. En la parte superior e inferior del cilindro se colocan dos placas de revestimiento en forma de círculo con un diámetro de 30 cm. Se utilizan como portalámparas UV. Ambas placas de revestimiento están perforadas con orificios de 19 mm para adaptarse a la luz ultravioleta. Los balastos se fijan dentro del cilindro de aluminio mediante cintas adhesivas de doble cara.


El sistema de cámara FPV está montado en la parte superior de la torre y dos cables se llevan a la parte inferior a través del cilindro.
Construcción de la estación de controles terrestres

A continuación se muestran los componentes necesarios para la estación de control de suelo (GCS).
- Transmisor RC de 2.4GHZ 4Ch
- Pantalla FPV
- 2 X interruptores de palanca
- 1 X interruptor de encendido
- 18650 celdas de batería
- Módulo de sistema de gestión de batería de 3 celdas para 18650
- Fuente de alimentación conmutada de 12 V, 5 A
El transmisor Rc contiene 2 joysticks y varios interruptores. Aquí, nuestro interés está solo en un joystick, el circuito y el indicador LED. Retire la carcasa del transmisor y observe cómo el circuito detecta los joysticks. Cada joystick contiene dos potenciómetros que están conectados a la placa de circuito. Según la posición del joystick, el potenciómetro cambia su resistencia para que el circuito pueda leer la posición del joystick.
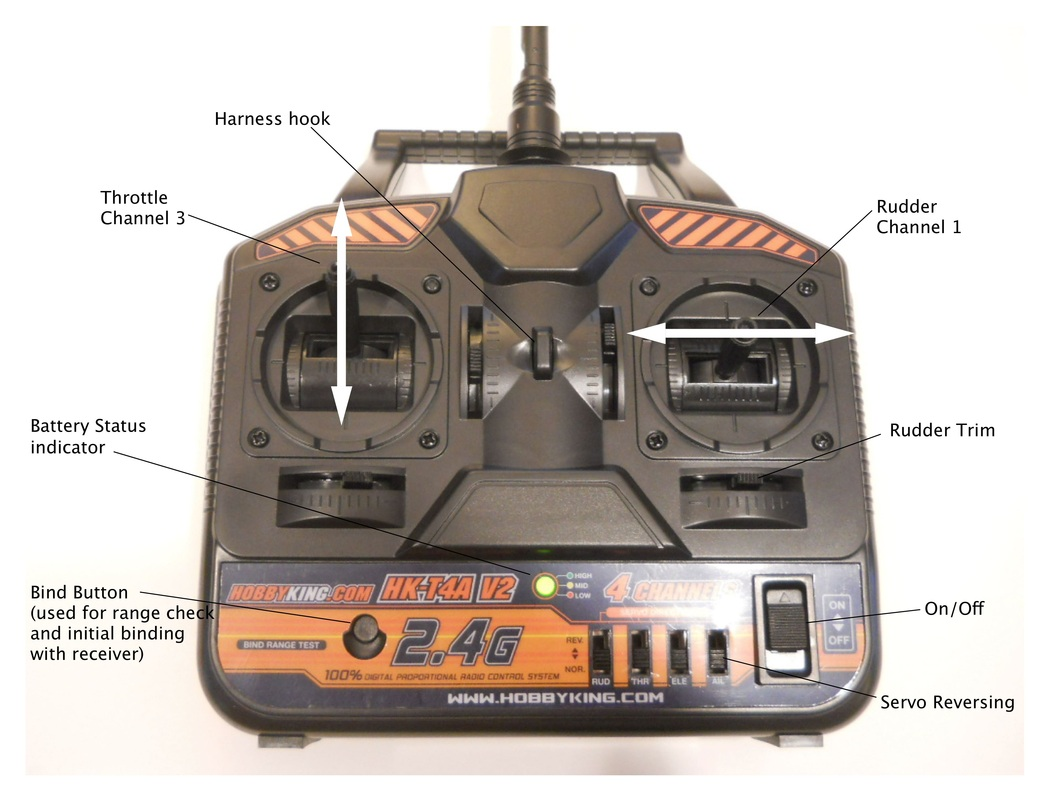
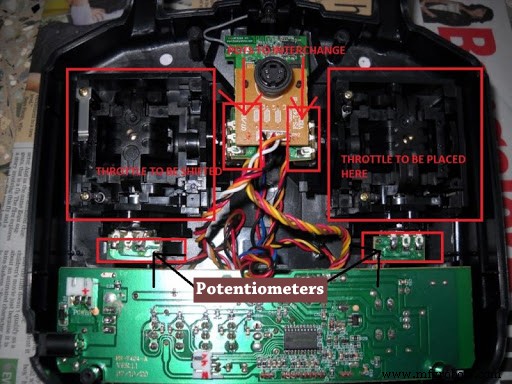
Retire un joystick y sus dos potenciómetros. Suelde los extremos de los cables respectivos a los dos interruptores de palanca. Ahora tenemos un joystick y dos interruptores de palanca para controlar los 4 canales. Un interruptor actúa como interruptor de armado del robot y el otro actúa como interruptor de control de luz ultravioleta. El LED indicador se puede utilizar como monitor de batería del GCS, ya que cambia su color a rojo cuando la batería está baja.
Ahora necesitamos hacer una fuente de alimentación para el transmisor y para la pantalla FPV. El voltaje de celda de una batería 18650 es de 3,7 V. Cuando está completamente cargada, se convierte en 4.2V. Para ello conectamos 3 celdas en serie para obtener unos 12V. En nuestro caso, usamos celdas con una capacidad de 1000 mAh. Para aumentar el tiempo de funcionamiento del GCS, utilizamos 9 baterías, 3 conjuntos de celdas conectadas en serie en paralelo para obtener una capacidad de 3000 mAh. Luego conectó el módulo BMS para proteger la batería.
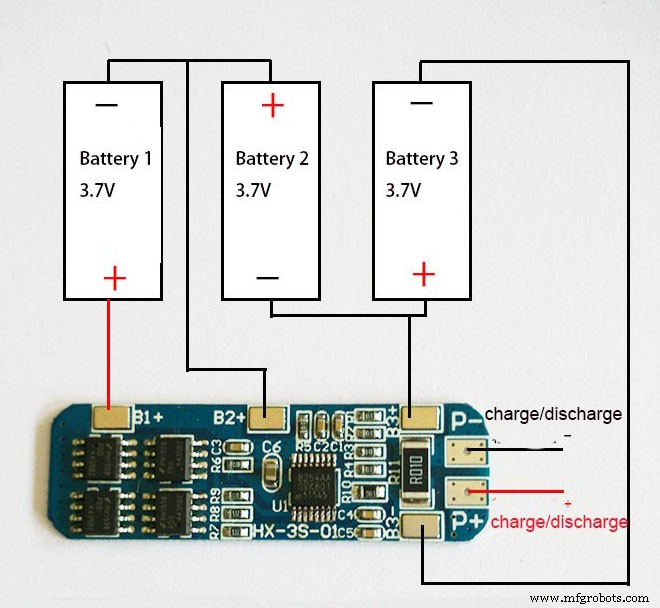
El P + y P- están conectados a la entrada de energía del transmisor y la entrada de energía de la pantalla FPV. La fuente de alimentación conmutada de 12 V (SMPS) viene con un potenciómetro para ajustar el voltaje de salida dentro de un rango limitado. Ajústelo a 12,8 y conecte la salida de voltaje a P + y P- del BMS. Esto ayudará a cargar la batería cuando el SMPS esté enchufado.
Puede diseñar un recinto para esto de acuerdo con sus preferencias.
Codificación
La primera tarea del código es leer las entradas del canal RC. Dado que estamos usando un receptor PWM, he usado interrupciones para leer los valores PWM. Para facilitar las cosas, he incluido una biblioteca PWM para usar interrupciones definiendo el pin conectado de la siguiente manera.
PWM ch1 (18); // Configure el pin 18 para la entrada
PWM ch2 (19); // Configure el pin 19 para la entrada
PWM ch3 (20); // Configure el pin 20 para la entrada
PWM ch4 (21); // Configurar el pin 21 para la entrada
En la secuencia de inicio, el código verifica el voltaje de la batería y si el interruptor UV está encendido. Si detecta alguno de ellos, el procedimiento de inicio esperará allí hasta que todos estén arreglados.
// verifica el voltaje de la batería
battery_voltage_monitor ();
while (batterylow ==true) {
battery_voltage_monitor ();
low_battery_notification ();
}
// verifique que el interruptor uv esté apagado
rc_read ();
while (uv_pwm> switch_on_pwm) {
rc_read ();
uv_on_warning_at_startup (); // tono del timbre
} Al hacer funcionar los motores, el voltaje de la batería cae críticamente solo por ese momento. Para evitar que se active la alarma de bajo voltaje cada vez que movemos el robot, la parte de monitoreo de la batería solo funciona cuando el robot no se está moviendo.
if (robot_moving ==false) {
battery_voltage_monitor (); // monitorea la batería cuando el robot no se mueve
} Todas las demás funciones, incluido el control del controlador del motor, la generación de tonos con zumbador y el control del relé, funcionan de la manera habitual. Puede seguir un tutorial general sobre los temas anteriores si no los conoce.
Procedimientos operativos
Procedimiento de encendido
Controlador GCS
1. Encienda el interruptor principal.
2. Asegúrese de que tanto el interruptor de armado del robot como el interruptor de luz ultravioleta estén apagados. (En posición baja).
Robot
1. Encienda el interruptor de encendido.
2. Espere el tono de inicio.
3. Espere el tono correcto del sistema.
Controlando el robot
1. Encienda el interruptor de armado del robot.
2. Mueva el joystick para mover el robot.
3. Encienda el interruptor UV para encender las luces ultravioleta. Cuando el interruptor de armado del robot está en la posición de apagado, el interruptor UV no funciona.
Indicador de nivel de batería
1. Asegúrese de que la batería tenga al menos 4 barras parpadeando para operar el robot.
2. Cuando la batería está baja, el zumbador emite un pitido y las dos últimas barras del indicador de nivel de batería parpadean.
Procedimiento de carga
1. Apague el robot.
2. Apague el GCS.
3. Enchufe el inversor a un tomacorriente. (Por lo general, los inversores tienen un indicador de nivel de carga incorporado)
Consideraciones generales
1. Usar en áreas concurridas
La luz ultravioleta es dañina para la piel y los ojos humanos. La exposición a la luz en distancias cortas (menos de 3 m) durante más de 60 segundos puede dañar los ojos e irritar la piel. Sin embargo, los rayos ultravioleta no pueden atravesar ningún medio sólido. Mirar la luz ultravioleta a través de un vidrio transparente no afecta los ojos ni el cuerpo humanos.
2. Materiales y dispositivos sensibles
Los plásticos blandos son muy sensibles a la luz ultravioleta. Los plásticos blandos se utilizan comúnmente en juguetes y envoltorios de alimentos. Por lo tanto, el dispositivo no se puede usar en tiendas de juguetes, supermercados y donde los artículos anteriores estén disponibles. Sin embargo, las luces ultravioleta se pueden usar para desinfectar los pisos de las áreas antes mencionadas.
3. Capacidad de uso en hospitales
En entornos hospitalarios, la luz ultravioleta es útil para desinfectar superficies de alto contacto en muy poco tiempo. Pero en este escenario se debe considerar la efectividad de la luz ultravioleta para equipos médicos y medicamentos.
Los equipos médicos con carcasas de plástico están hechos de plásticos duros, ya que se someten a un tratamiento de radiación durante el proceso de fabricación. Además, no hay efectos probados sobre la eficacia de la luz ultravioleta para los medicamentos almacenados en los hospitales.
Además, todo el equipo médico de acero inoxidable y las máscaras N95 se pueden esterilizar con el mismo dispositivo.
4. Efectividad para las áreas sombreadas
La luz ultravioleta se refleja en las superficies al igual que las luces visibles. Por lo tanto, las áreas que no reciben la luz ultravioleta directa, reciben la luz ultravioleta reflejada. Sin embargo, las áreas muy cubiertas o sombreadas no reciben luz ultravioleta eficaz. Estas áreas tampoco se desinfectan con métodos basados en líquidos desinfectantes.
5. Otras consideraciones
La luz ultravioleta genera ozono cuando se trabaja en entornos cerrados durante períodos más prolongados. Como práctica general, todos los ambientes cerrados se ventilan durante 20 minutos después de ser esterilizados con luces ultravioleta.
Código
Código para Arduino Mega
https://github.com/tharindusuraj/Ultraviolet-Germicidal-RobotEsquemas
uv-x_Q9R5T59Q32.fzzProceso de manufactura
- Un robot móvil con evitación de obstáculos basada en la visión
- Robot de cámara web Raspberry Pi - Mejor tutorial de transmisión de video
- Robot con video controlado por web Raspberry Pi
- Reciclar el robot de clasificación con Google Coral
- Obstáculos que evitan el robot con servomotor
- Sistema de riego automático de plantas con Arduino
- Himno nacional de EE. UU. con luces y tono
- Controla el brazo del robot Arduino con la aplicación de Android
- WiDC:Robot FPV controlado por Wi-Fi
- Video:Escaneo en proceso de un perfil torneado mediante robot
- Centro de torneado equipado con brazo robótico