


Dispositivo de automatización de tareas de videojuegos
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
|
Acerca de este proyecto
Hola mundo,
Si eres un jugador de la vieja escuela, es posible que recuerdes el Nintendo NES R.O.B. alrededor de 1985. Para la generación que acababa de llegar a la escena, era un robot que sostenía el controlador de NES, miraba la pantalla y jugaba contigo o contra ti.
Sí, me refiero a 1985.
Sí, dije Nintendo Robot.
R.O.B siempre me viene a la mente cuando me veo obligado a realizar tareas repetitivas en los videojuegos. ¿No sería genial entregarle el controlador a su compañero robot y dejar que se encargue de las cosas aburridas? Bueno, frente a filetear cientos de peces en Elder Scrolls Online, se me ocurrió una solución mejor. Desafortunadamente, no es R.O.B 2.0, no me pesca ... todavía. Sin embargo, es un dispositivo programado para presionar un botón en el controlador de una consola cada dos segundos ... cuidado con Skynet.
Construcción del proyecto
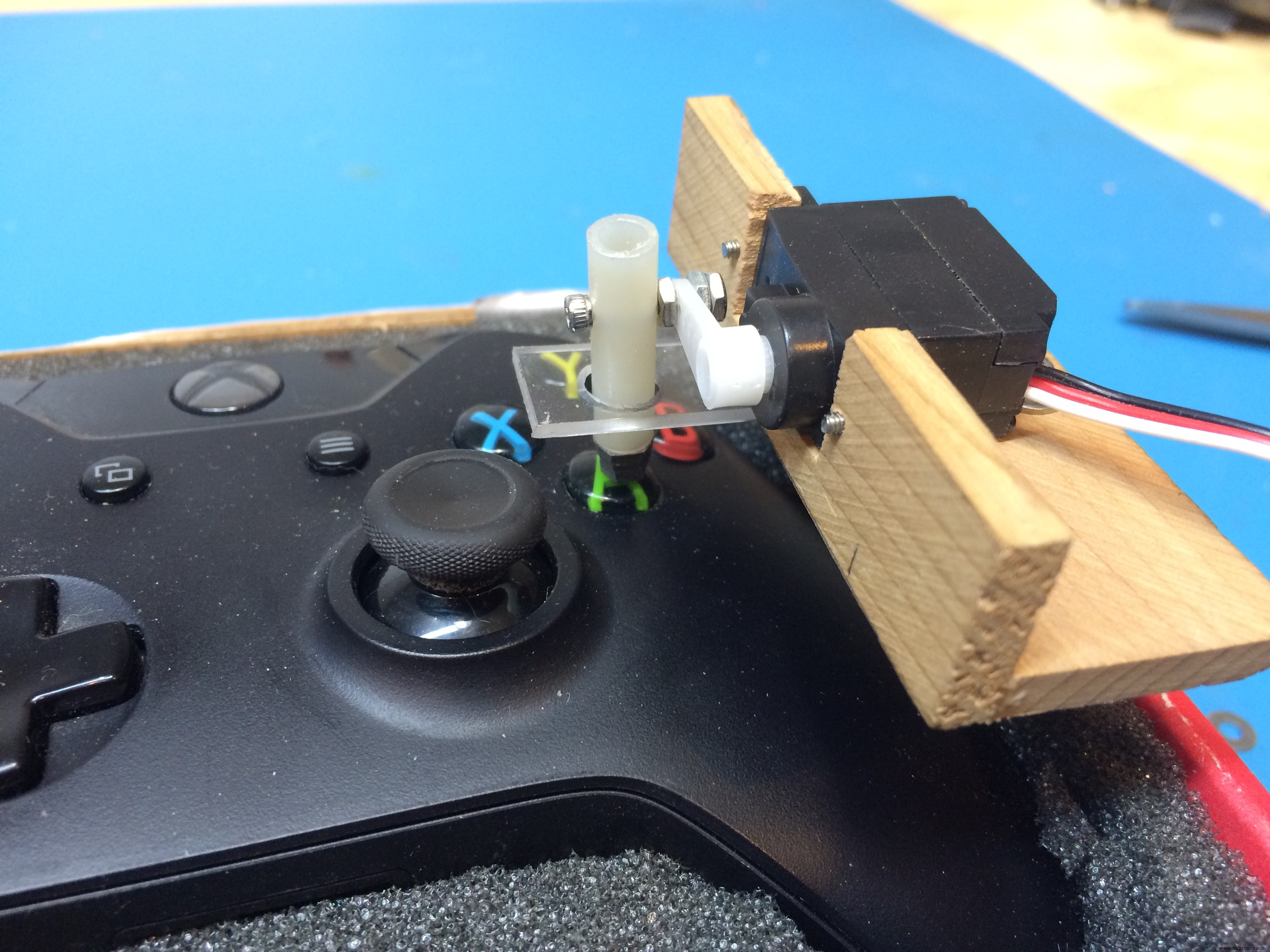
Reciclé una caja de envío de SparkFun y algunas láminas de espuma para hacer un soporte cómodo para el controlador de Xbox.




Pegué algunas láminas de madera de bajo para hacer un soporte de servo. Un tubo de estireno con un parachoques de goma unido a un extremo para el pulgar automático y una hoja de acrílico para mantener el "pulgar" en su lugar. (Mientras escribo esto más de 3 años después, ahora soy dueño de una impresora 3D, esto es inaceptable y se corregirá directamente.:D)



El código
Será mejor que IBM Watson tenga cuidado. Este código puede contener la IA del futuro que acaba con la humanidad ... simplemente diciendo que has sido advertido.
En serio, es un boceto realmente simple.
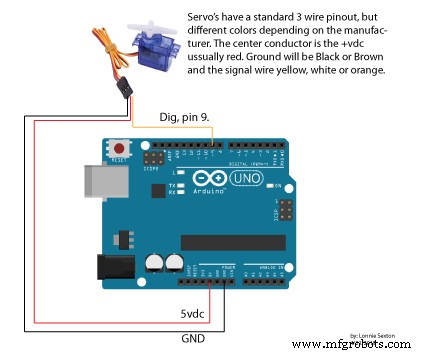
#include // Desde LibraryServo servoMain; // Definir la configuración de Servovoide () {servoMain.attach (9); // servo en el pin digital 9} void loop () {servoMain.write (45); // Gire el servo a la izquierda a 45 grados de retraso (1500); // Espere 1,5 segundoservoMain.write (0); // Gire el servo a la izquierda a 0 grados de retraso (750); // Espere 0,75 segundos}
Terminando
Este proyecto comenzó como una broma entre amigos y el vapor cobró existencia. Los jugadores se ríen mucho con un poco de creatividad. Hay un montón de cosas que mejorar en el diseño, pero a veces es mejor mantenerlo simple.
Versiones futuras
En algún momento planeo volver a visitar el controlador automático. Imprima en 3D un accesorio de jaula, agregue todas las funciones con algunos comentarios sensoriales de la pantalla (foto) y el controlador (vibración). Un auto-corredor sería un desafío interesante. Más adelante pude verlo compitiendo contra los mejores humanos como lo hicieron las computadoras Chess en los años 80. Si tiene alguna sugerencia o comentario, me encantaría escucharlo. ¿Conoce algún juego con tareas molestas que abordar? Por favor publique a continuación.
Salir
y (o.o) y
Código
- Presione el botón O
Presione el botón O Arduino
Opere un servo cada x segundos para presionar un botón en un control remoto.#include// From LibraryServo servoMain; // Definir la configuración de Servovoide () {servoMain.attach (9); // servo en el pin digital 9} void loop () {servoMain.write (45); // Gire el servo a la izquierda a 45 grados de retraso (1500); // Espere 1,5 segundos servoMain.write (0); // Gire el servo a la izquierda a 0 grados de retraso (750); // Espere 0,75 segundos}
Esquemas
Proceso de manufactura
- Dispositivo de depilación
- Ajedrez
- Pinball
- Balón de fútbol
- Renesas:controlador de video LCD Full HD con entrada MIPI-CSI2
- Estación meteorológica Raspberry Pi 2
- RASPBERRY PI HOME AUTOMATION
- Cómo elegir un controlador de automatización industrial
- Video:Alta tasa de producción en VMC mediante automatización robótica
- Comprender la automatización de la prensa
- Gestión de un dispositivo PLCnext Control a través de SNMP