


Diseño de circuito del módulo de potencia Flyback para lector RFID
La tecnología de fuente de alimentación conmutada ha sido testigo de un desarrollo hacia la miniatura, alta frecuencia y alta eficiencia con el desarrollo de chips altamente integrados en los últimos años. Los chips de control altamente integrados simplifican los componentes periféricos necesarios, ya que es relativamente fácil diseñar una fuente de alimentación conmutada según el software de diseño. Sin embargo, el problema de la alta integración conduce a una baja libertad de diseño, baja disponibilidad de chips y bajo precio. El software de diseño desarrollado por cada fabricante solo es capaz de simular algunos tipos de chips peculiares. En la aplicación práctica, es crucial diseñar una fuente de alimentación conmutada compatible con las demandas del producto con excelentes condiciones de funcionamiento. Según el requisito del módulo de alimentación para RFID, se diseña un interruptor de alimentación con un voltaje de 220 V CA a 0,5 V CC y una dimensión de 88 mm x 70 mm. Dado que la corriente de funcionamiento es cercana a 1,5 A en el proceso de lectura de etiquetas, la corriente de salida máxima de la potencia del interruptor diseñada se establece en 3 A.
En el diseño de miniaturas con potencia de salida relativamente baja, según la teoría de Erickson R W, la disponibilidad del interruptor de potencia del interruptor flyback que es 0.385 es más de 0.353 que usa el tipo de choque normal, puente completo y medio puente. Por lo tanto, se recoge la estructura del convertidor flyback. Teniendo en cuenta las ventajas del diseño de retroalimentación y el controlador de modo actual, se selecciona el chip de control PWM de modo actual UC3842.
En el interruptor de alimentación que aplica el chip UC3842, el diseño del circuito periférico es relativamente fácil. La estructura del chip de control PWM en modo actual elimina el doble polo que genera la inductancia en el bucle para simplificar efectivamente el diseño del bucle de retroalimentación. Se aplica un estilo de retroalimentación del terminal de salida que consiste en un tubo de estabilovoltaje TL431 y un optoacoplador. En el diseño basado en UC3842, los diseñadores tienden a diseñar de forma independiente cada módulo en la estructura flyback, enfatizando el diseño del circuito adyacente y el circuito de retroalimentación, y descuidando el diseño de otros circuitos. Por ejemplo, según el teorema del elemento adicional del Dr. Middlebrook, la impedancia de entrada del filtro de entrada debe ser mucho menor que la impedancia de entrada del convertidor. De lo contrario, posiblemente se produzca una fluctuación en el circuito. Este diseño analiza cuidadosamente el diseño del circuito adyacente, como el diseño del circuito del filtro de entrada, la compensación de pendiente y el diseño del circuito de tierra. El esquema de diseño se determina a través de la simulación de Sabre y su compatibilidad con los requisitos y la estabilidad a través de la depuración con RFID.
Teoría básica de la alimentación del interruptor Flyback
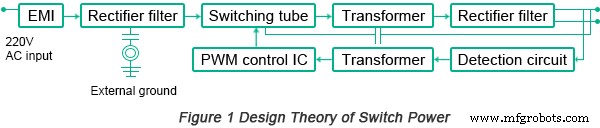
La teoría de diseño básica de la alimentación del interruptor es transformar VAC en VDC para la fuente de alimentación del chip IC cambiando DC a HFAC que luego cambia a salida DC. La retroalimentación estabiliza el voltaje de salida de la muestra de CC de salida y el interruptor de control IC de entrada. La teoría de la alimentación del interruptor se ilustra en la Figura 1.
La estructura de bucle cerrado doble del modo actual se aplica en el convertidor de control de la potencia del interruptor flyback. La característica del convertidor flyback radica en el hecho de que en el estado cerrado del tubo de conmutación, la energía de inductancia dentro de las bobinas en un lado del transformador proporciona energía para el portador a través del diodo rectificador, mientras que en el estado abierto del tubo de conmutación, la energía se almacena en el interior. la bobina del transformador y la salida la proporciona la energía almacenada dentro del condensador de salida. El diagrama esquemático del convertidor flyback se ilustra en la Figura 2.
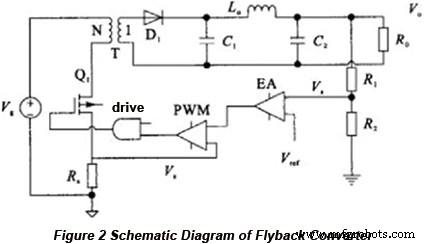
Cuando el voltaje detectado por las resistencias de detección de salida R1 y R2 es menor que el voltaje de referencia Vref , el error aumenta a través del amplificador de error con el tubo de conmutación Q1 abierto. La inductancia primaria y la corriente del transformador aumentan según la pendiente de (Vg - Ven )/ Lm . Resistencia de muestreo Rs cambia la inductancia primaria y la corriente en voltaje de muestreo. Basado en la comparación entre el voltaje de muestreo en la resistencia de muestreo Rs y voltaje de error, cuando el voltaje en la resistencia de muestreo Rs aumenta al valor que es más alto que el voltaje de error, se emitirá un nivel bajo y el tubo de conmutación se cerrará hasta la llegada del próximo reloj. La potencia de conmutación Flyback no necesita un inductor de potencia de salida y el inductor del transformador se puede aplicar directamente para potencia que presenta una estructura topológica simple. El circuito de control depende principalmente del modo actual del chip PWM UC3842 y del circuito periférico.
Chip PWM de modo actual UC3842
La CPU de control aplicada en este diseño es el chip PWM UC3842 en el modo de frecuencia y corriente fijas, que integra componentes de control cruciales como el oscilador, el amplificador de error, el comparador PWM y el disparador SR. Este chip presenta la funcionalidad de protección contra bajo voltaje y sobrecorriente con un modo de salida de tótem, frecuencia de trabajo de 500kHz, corriente de arranque inferior a 1mA y corriente de salida máxima de 1A.
Las funciones de los pines son diferentes entre sí. El pin 7 es para la fuente de alimentación. Cuando el voltaje supera el umbral de inicio lento de 16 V, el disparador Schmitt genera un nivel alto. El regulador de voltaje suministra un voltaje de referencia de 5 V al pin 8 y cuando el voltaje es inferior a 10 V, el disparador Schmitt emite un nivel bajo con voltaje bajo bloqueado. El tubo estabilizador interno limita el voltaje máximo de entrada dentro de 36V. Se suministra energía a Ct por el pin 4 a través del circuito RC externo y por el pin 8 a través de la resistencia Rt y Ct determina la frecuencia del oscilador a través de la fuente de corriente interna que genera electricidad. El pin 2 es la entrada inversora del amplificador de error, mientras que el pin 1 es la salida del amplificador de error para suministrar compensación. El pin 3 es el pin de detección de corriente, que determina el ciclo de trabajo a través de la salida del amplificador de error y cuando el voltaje del pin 3 es superior a 1 V, el flujo de corriente se cierra. El pin 6 suministra salida de modo tótem con la corriente de trabajo máxima de 1A, acelerando el cierre del tubo de conmutación.
Diseño del control de potencia del interruptor Flyback
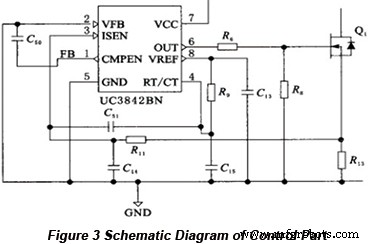
El diagrama esquemático de la parte de control se muestra en la Figura 3 a continuación. La parte de control del convertidor flyback está integrada principalmente dentro del chip UC3842 y solo unos pocos componentes externos pueden implementar la función de control requerida. El módulo de función de control principal incluye circuito de arranque, diseño de frecuencia, circuito de protección, circuito de conducción y compensación de pendiente.
• Circuito de arranque y diseño de frecuencia
El circuito de arranque suministra voltaje de arranque al pin 7 de más de 16V. Cuando el sistema arranca, el devanado auxiliar suministra energía al pin 7. La frecuencia de trabajo de este sistema está determinada por el capacitor de temporización y la resistencia entre el pin 8 y el pin 4. El voltaje de referencia de 5 V del pin 8 proporciona energía al capacitor C15 a través de la resistencia R9 . Condensador C15 luego genera una onda de diente de sierra a través de una fuente de corriente interna que genera electricidad cuyo lapso de tiempo determina el tiempo muerto del chip que emite PWM. Para garantizar el rendimiento, el tiempo muerto debe ser inferior al período de oscilación en un 5 %. Con base en el diagrama de secuencia de tiempo, se puede obtener que C15 es 3.3nF y frecuencia de trabajo 47kHz. De acuerdo con la fórmula fosc =1.7/(Rref xC15 ), el valor de R9 es 11kHz.
• Circuito de reversión de corriente
El circuito de reducción de corriente del chip transforma la corriente del inductor en el borde primario en el voltaje de salida del amplificador de voltaje y error implementado por el comparador PWM a través de la resistencia de detección de sobrecorriente. Cuando el voltaje del pin 3 es más de 1V, la salida se rompe. Se supone que la corriente máxima del inductor es 1A y el valor de la resistencia de detección de corriente R13 se supone que es 1Ω. Para evitar el error de cierre provocado por el pico de corriente del inductor del borde primario del transformador, R11 y C14 se accede al pico del filtro y la corriente pico es de aproximadamente cientos de nanosegundos. En la condición en que se supone que R11 es 1k y C14 500pF, la constante de tiempo τ =RC =500ns.
• Circuito de conducción del tubo MOS
El circuito de conducción del tubo MOS es responsable de la excelente forma de onda de PWM, especialmente el borde de caída. La conexión en serie entre el pin de salida 6 y la resistencia en serie de rejilla R6 disminuirá la fluctuación parásita de alta frecuencia causada por la capacitancia de entrada del tubo MOS y cualquier inductancia de cable serial en el circuito. Para garantizar la forma de onda PWM del interruptor del tubo MOS, el valor de R6 siempre es pequeño en el rango de decenas a veinte ohmios. El valor de R8 se supone que es de 15 kΩ como resistencia de purga de rejilla de tubo MOS.
• Compensación de pendientes
En el control del modo de corriente máxima, el valor máximo de la corriente del inductor se establece constantemente mientras que el valor promedio de la corriente del inductor no lo es. El cambio del ciclo de trabajo cambiará la corriente promedio y el anillo interno de control de corriente máxima asegura el valor máximo de la corriente del inductor pero no controla el valor promedio correcto de la corriente del inductor compatible con el voltaje de salida, lo que lleva al cambio constante del voltaje de salida. Cuando el ciclo de trabajo es superior al 50 %, la fluctuación de la corriente del inductor generará una oscilación. En este diseño, se requiere compensación de pendiente. La aplicación de compensación de pendiente superior se refiere a una pila de tensión de pendiente positiva en las señales de muestra actuales. La compensación capacitiva se aplica en este diseño con un C51 de 100pF agregado entre el pin 3 y el pin 4 y la señal de oscilación del oscilador suministra energía a C51 y el pin 3 a través del condensador. Con este tipo de compensación de pendiente, la capacitancia es relativamente pequeña con un rango de pF para evitar atraer la corriente del oscilador y generar un voltaje negativo demasiado grande en el pin 3.
Diseño del circuito periférico de la alimentación del interruptor Flyback
• Diseño de circuito para EMI y filtro rectificador
Para filtrar la interferencia de la red eléctrica de alta frecuencia a los dispositivos y la influencia del interruptor de alta frecuencia a la red eléctrica, se debe acceder al circuito de filtro EMI por rango de entrada. El diagrama de circuito de la onda de filtro EMI común se muestra en la Figura 4.
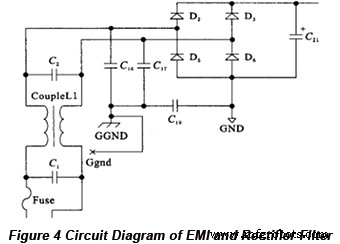
C1 está conectado en el puerto de entrada de la red eléctrica mientras C2 es con puerto de entrada del dispositivo para eliminar la interferencia de modo diferencial. L comparte la misma dirección con el estrangulador de modo común para filtrar la interferencia de modo común mientras que C16 y C17 están conectados a tierra para filtrar la interferencia de modo común.
La corriente de fuga de C16 y C17 se calcula conforme a la fórmula: . Para dos condensadores idénticos, la amplitud de la corriente de fuga debe ajustarse a la fórmula:
. Para dos condensadores idénticos, la amplitud de la corriente de fuga debe ajustarse a la fórmula: , donde f se refiere a la frecuencia de la red eléctrica con el valor de 50 Hz, C se refiere a la capacitancia general de 4400pF a tierra, y V se refiere al voltaje de tierra de 110V. Por lo tanto, el valor de Ileak es 0.15mA que es compatible con la corriente alterna con el valor válido de 220VAC después de EMI compatible con el estándar de seguridad. la amplitud es
, donde f se refiere a la frecuencia de la red eléctrica con el valor de 50 Hz, C se refiere a la capacitancia general de 4400pF a tierra, y V se refiere al voltaje de tierra de 110V. Por lo tanto, el valor de Ileak es 0.15mA que es compatible con la corriente alterna con el valor válido de 220VAC después de EMI compatible con el estándar de seguridad. la amplitud es  mientras que la salida DCV es
mientras que la salida DCV es  . El voltaje de ruptura inversa del diodo debe cumplir con el siguiente requisito:
. El voltaje de ruptura inversa del diodo debe cumplir con el siguiente requisito: . C se refiere a la capacitancia del filtro mientras que RL se refiere a la carga. Cuanto mayor sea la constante de tiempo RL C es y cuanto más suave sea la capacitancia, mejor será el efecto del filtro. Se activa el diodo ln4007 con un alto voltaje soportado.
. C se refiere a la capacitancia del filtro mientras que RL se refiere a la carga. Cuanto mayor sea la constante de tiempo RL C es y cuanto más suave sea la capacitancia, mejor será el efecto del filtro. Se activa el diodo ln4007 con un alto voltaje soportado.
• Oscilación provocada por la impedancia de salida del filtro y la impedancia de entrada del convertidor
La incompatibilidad entre la impedancia de entrada del convertidor y la impedancia de salida del filtro posiblemente también provoque oscilaciones. La impedancia de entrada del convertidor del sistema de bucle se puede considerar como una resistencia negativa (  ). El filtro es un filtro LC y la función de transferencia se puede obtener con ESR de inductancia y capacitancia.
). El filtro es un filtro LC y la función de transferencia se puede obtener con ESR de inductancia y capacitancia.

La impedancia de entrada del convertidor de oscilación constante del sistema debe ajustarse a la fórmula: .
.
Por lo tanto, solo si la impedancia de entrada del convertidor de bucle es menor que la impedancia de salida de oscilación del filtro calculada, el coeficiente de amortiguamiento de la función de transferencia es un valor positivo que se estabilizará para reducir la oscilación. De lo contrario, el circuito fluctuará.
• Diseño de circuito amortiguador
Para evitar que el tubo de frecuencia se destruya como resultado de una sobretensión de apagado, el circuito amortiguador RCD del borde primario debe montarse en el transformador. El puerto de salida descompone el diodo de salida para evitar una ruptura fuerte con el circuito amortiguador de salida agregado, que se ilustra en la Figura 5.
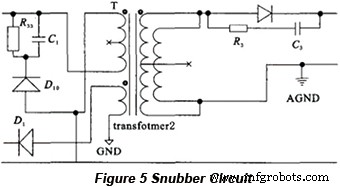
En el proceso de ruptura del tubo MOS, la corriente del borde primario id suministra energía a la capacitancia de la fuente de fuga parásita a través de la fuente de fuga del borde primario del transformador. Este voltaje de alta frecuencia puede hacer que el voltaje en el tubo del interruptor exceda el voltaje soportado y rompa el tubo del interruptor, por lo que se agrega un circuito amortiguador RCD para proporcionar una ruta de toma de voltaje. Se recoge el diodo de recuperación rápida FR107 con alto voltaje de resistencia, resistencia RCD de 5kΩ y capacitancia de 3300pF.
Cuando la entrada está abierta con el tubo MOS abierto, el voltaje agregado en el diodo Schottky de salida (  ) y la ruptura fuerte del tubo MOS conduce a la ruptura del diodo. Con el circuito amortiguador RC agregado, el voltaje en el diodo schottky VD =VOO + EO xR3 . El tiempo abierto de 2SK792 del tubo MOS es de 55 ns, el voltaje soportado inverso del diodo schottky SB540 es de 60 V, salida VO es 5V y la corriente máxima es 3A. Por lo tanto, la resistencia equivalente del circuito amortiguador máximo es 18,33 Ω y (
) y la ruptura fuerte del tubo MOS conduce a la ruptura del diodo. Con el circuito amortiguador RC agregado, el voltaje en el diodo schottky VD =VOO + EO xR3 . El tiempo abierto de 2SK792 del tubo MOS es de 55 ns, el voltaje soportado inverso del diodo schottky SB540 es de 60 V, salida VO es 5V y la corriente máxima es 3A. Por lo tanto, la resistencia equivalente del circuito amortiguador máximo es 18,33 Ω y (  ). Cuando R es 18 Ω y C es 560 pF, la resistencia en serie equivalente es 18,06 Ω.
). Cuando R es 18 Ω y C es 560 pF, la resistencia en serie equivalente es 18,06 Ω.
• Diseño del circuito de salida
La rectificación se implementa por la parte de salida a través del diodo schottky y el filtrado aplica un capacitor con ESR bajo con una salida reductora de ESR de capacitor equivalente, que se muestra en la Figura 6.
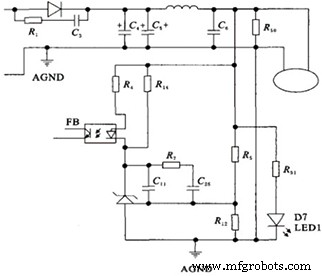
Los circuitos de muestreo de salida se obtienen a través de R5 y R12 tensión diferencial y el valor de R12 se determina con referencia a la corriente del terminal de salida TL431 que es de 1,5 μA. Para evitar que la corriente influya en la relación de tensión diferencial y el ruido, la corriente a través de la resistencia R12 debe ser más de 100 veces la corriente de entrada TL431. Rbajo<2.5/150μA=16.6kΩ. Dado que la corriente de trabajo de TL431 está en el rango de 1 mA a 100 mA, cuando la corriente de R5 es casi 0, la corriente de 1 mA se proporciona a TL431 por R14 (R14
Según las curvas características del triodo en PC817B, cuando la corriente directa del transistor es de aproximadamente 7 mA, el valor de IC también es de 7 mA y el voltaje del emisor es lineal dentro de una categoría relativamente amplia con uc3842comp lineal. El CTR en PC817B está en el rango de 1.3 a 2.6. Cuando el valor de IC es 7mA, considerando la peor situación, el valor de CTR es 1.3. Se requiere que la corriente máxima que fluye a través del LED sea If =YoC /1,3 =5,38 mA, R4 <(5 - Uka - Uf )/5,38mA =(5 - 1,15 - 2,5)/5,38mA =250Ω. La corriente máxima que puede soportar el TL431 es de 150 mA, mientras que la corriente máxima que puede soportar el PC817 es de 50 mA. Por lo tanto, la corriente máxima R4 proporciona 50mA con R4>(5 - 1,15 - 2,5)/50mA =27Ω. Entonces el rango de R4 está entre 27 Ω y 250 Ω con el valor de 150 Ω seleccionado.
• Diseño del circuito de tierra
El transformador se aplica como aislador de tierra entre tierra fría y caliente en la alimentación del interruptor. La tierra caliente en el borde primario del transformador se puede formar en un bucle a través de la red eléctrica y el transformador secundario se refiere al bucle formado por tierra fría y tierra. El condensador de seguridad Y es recogido por C16 y C17 para conectar la línea cero y la línea de disparo a tierra del marco para filtrar la interferencia de modo común. Condensador C18 entre tierra caliente y tierra fría transforma el ruido en el lado secundario del transformador en un cortocircuito primario para reducir la radiación de ondas electromagnéticas.
Recursos útiles
• Una introducción completa de IoT basada en RFID
• Diseño de PCB de alta potencia en entornos de alta temperatura
• Cómo derrotar los defectos de conexión a tierra de la fuente de alimentación de control en función de la reducción del aislamiento en el diseño de PCB
• Discusión sobre potencia y tierra en la compatibilidad electromagnética de PCB
• Cómo analizar y prohibir la impedancia de potencia de PCB de alta velocidad
• PCB con respaldo de aluminio:la solución para aplicaciones de alta potencia y tolerancia estricta
• Servicio completo de fabricación de PCB de PCBCart:múltiples opciones de valor agregado
• Servicio avanzado de ensamblaje de PCB de PCBCart:comience desde 1 pieza
Tecnología Industrial
- Circuito de filtro / rectificador
- Diseño de circuito seguro
- Sistemas de energía monofásicos
- Cálculo del factor de potencia
- Consideraciones de diseño de detección, control y protección de circuitos para aplicaciones de seguridad en el hogar inteligente
- Placas de circuito impreso para instrumentación médica
- Directrices para el diseño de RF y microondas
- Diseño para la fabricación de PCB
- Retrocesos y soluciones en el diseño de PCB RF
- Diseño de PCB para circuitos de radiofrecuencia y compatibilidad electromagnética
- 5 consejos para el diseño de circuitos automotrices para derrotar a EMI