


Cómo funcionan el motor sin escobillas y ESC
En este tutorial aprenderemos cómo funcionan el motor sin escobillas y el ESC. Este artículo es la primera parte del siguiente video, donde aprenderemos el principio de funcionamiento de un motor DC sin escobillas y ESC (controlador electrónico de velocidad), y en la segunda parte aprenderemos cómo controlar un motor BLDC usando Arduino.
Puede ver el siguiente video o leer el tutorial escrito a continuación.
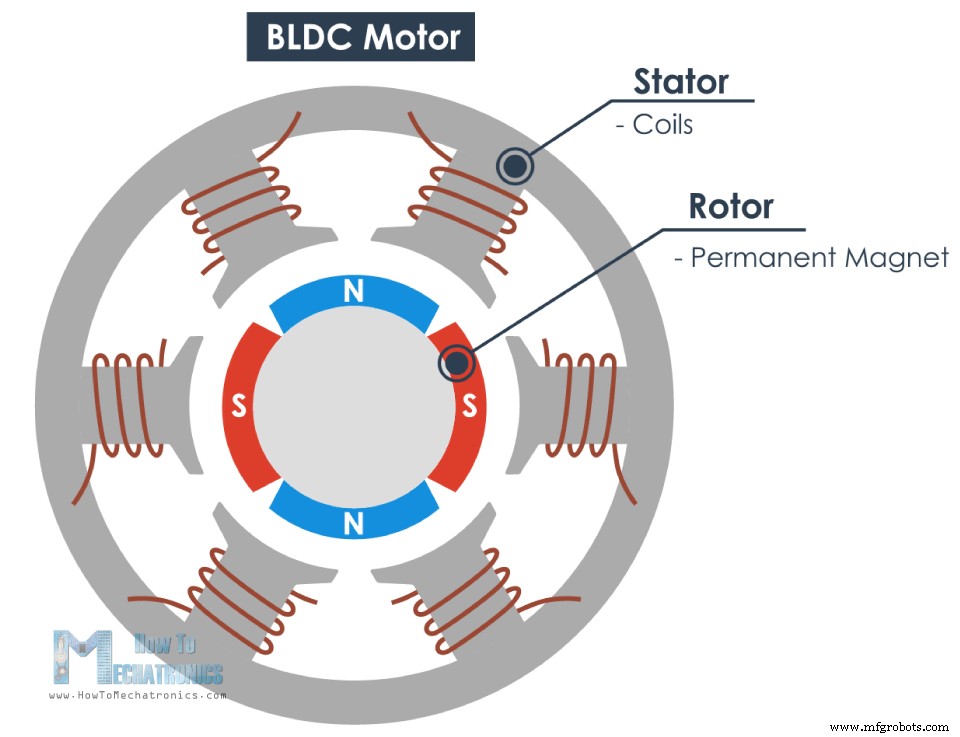
Un motor BLDC consta de dos partes principales, un estator y un rotor. Para esta ilustración, el rotor es un imán permanente con dos polos, mientras que el estator consta de bobinas dispuestas como se muestra en la imagen a continuación.
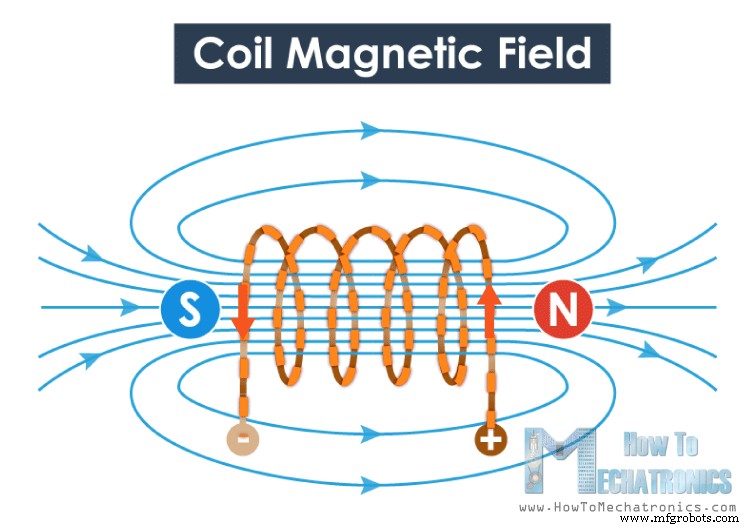
Todos sabemos que si aplicamos corriente a través de una bobina, generará un campo magnético y las líneas del campo magnético o los polos dependerán de la dirección de la corriente.
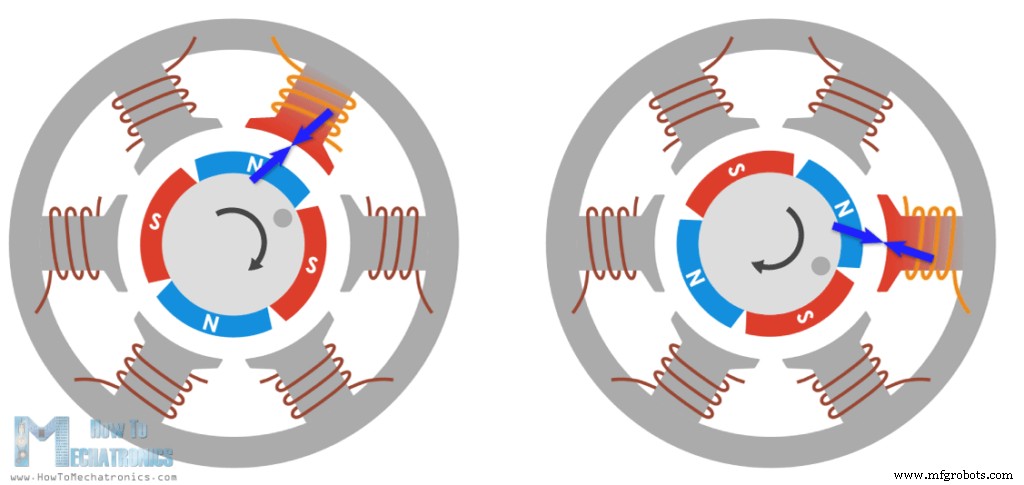
Entonces, si aplicamos la corriente adecuada, la bobina generará un campo magnético que atraerá el imán permanente de los rotores. Ahora, si activamos cada bobina una tras otra, el rotor seguirá girando debido a la fuerza de interacción entre el electroimán y el permanente.
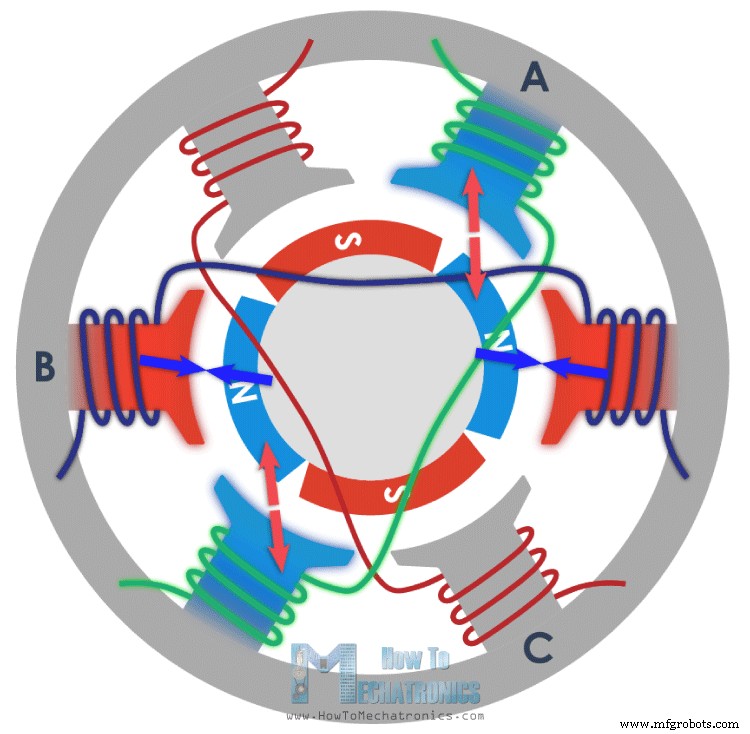
Para aumentar la eficiencia del motor, podemos enrollar dos bobinas opuestas como una sola bobina de manera que genere polos opuestos a los polos del rotor, por lo que obtendremos una fuerza de atracción doble.
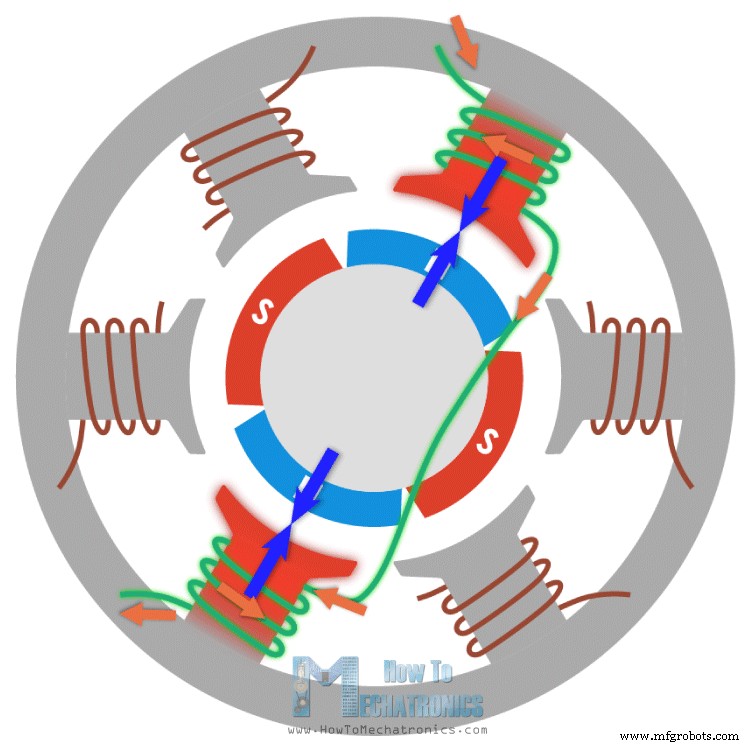
Con esta configuración podemos generar los seis polos en el estator con solo tres bobinas o fase. Podemos aumentar aún más la eficiencia energizando dos bobinas al mismo tiempo. De esa manera una bobina atraerá y la otra bobina repelerá el rotor.
Para que el rotor realice un ciclo completo de 360 grados, necesita seis pasos o intervalos.
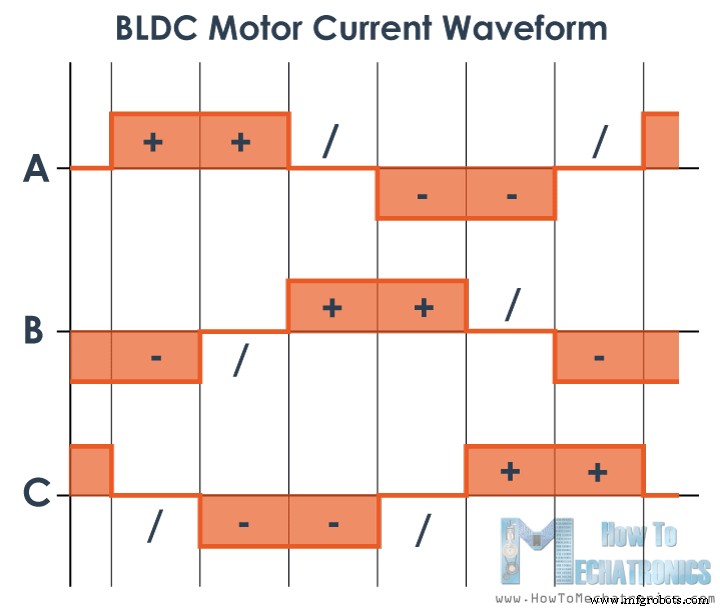
Si observamos la forma de onda de la corriente, podemos notar que en cada intervalo hay una fase con corriente positiva, una fase con corriente negativa y la tercera fase está apagada. Esto da la idea de que podemos conectar los extremos libres de cada una de las tres fases y así podemos compartir la corriente entre ellos o usar una sola corriente para energizar las dos fases al mismo tiempo.
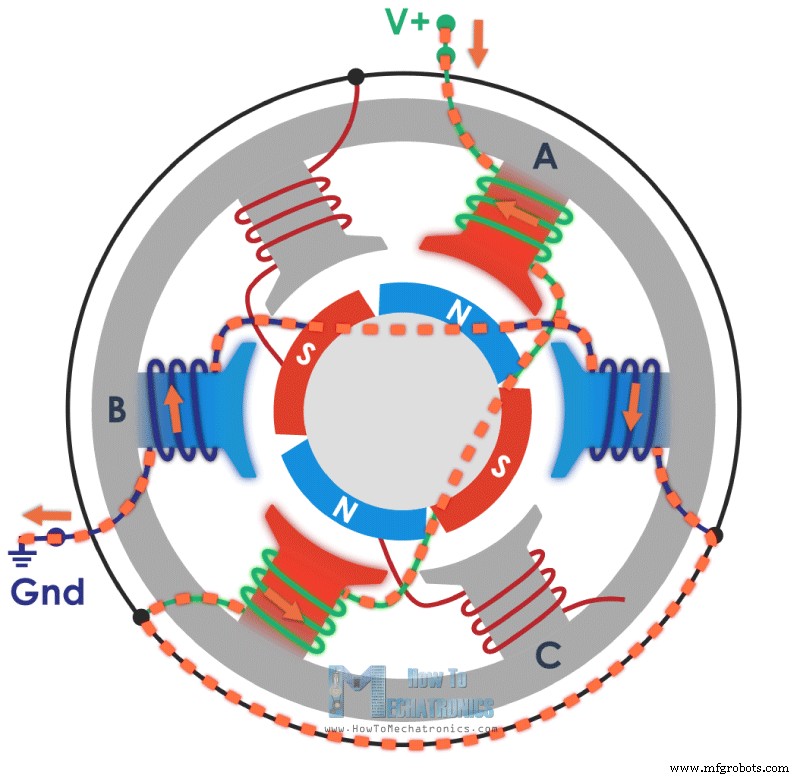
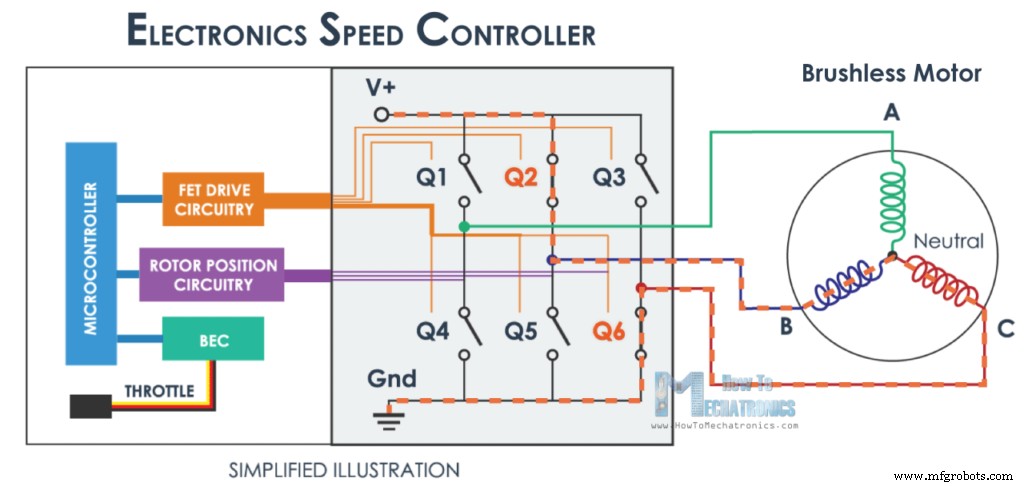
Aquí hay un ejemplo. Si subimos la fase A Alta, o la conectamos a la tensión DC positiva, con algún tipo de interruptor, por ejemplo un MOSFET, y por otro lado, conectamos la fase B a tierra, entonces la corriente fluirá desde VCC, a través de la fase A, el punto neutro y la fase B, a tierra. Entonces, con un solo flujo de corriente, generamos los cuatro polos diferentes que hacen que el rotor se mueva.
Con esta configuración, en realidad tenemos una conexión en estrella de las fases del motor, donde el punto neutro está conectado internamente y los otros tres extremos de las fases salen del motor y es por eso que el motor sin escobillas tiene tres cables que salen de él.
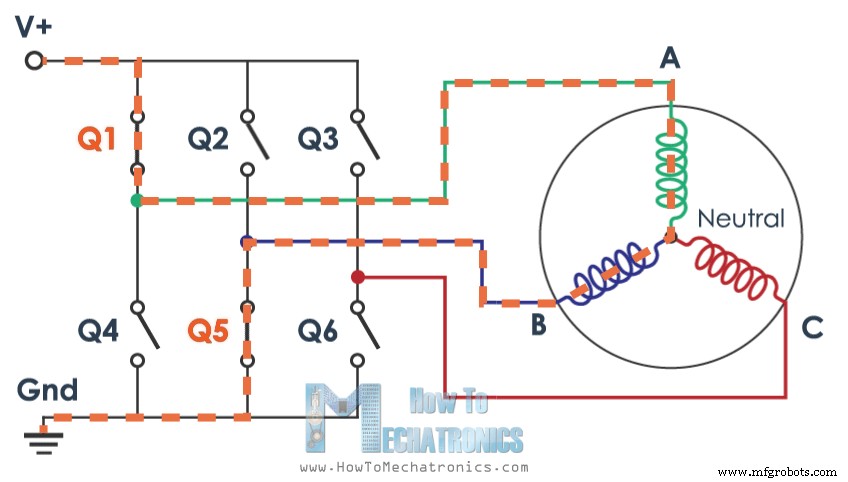
Entonces, para que el rotor haga un ciclo completo, solo necesitamos activar los dos MOSFET correctos en cada uno de los 6 intervalos y de eso se tratan los ESC.
Un ESC o un controlador de velocidad electrónico controla el movimiento o la velocidad del motor sin escobillas al activar los MOSFET apropiados para crear el campo magnético giratorio para que el motor gire. Cuanto mayor sea la frecuencia o más rápido pase el ESC por los 6 intervalos, mayor será la velocidad del motor.
Sin embargo, aquí surge una pregunta importante, y es cómo sabemos cuándo activar qué fase. La respuesta es que necesitamos saber la posición del rotor y hay dos métodos comunes que se usan para determinar la posición del rotor.
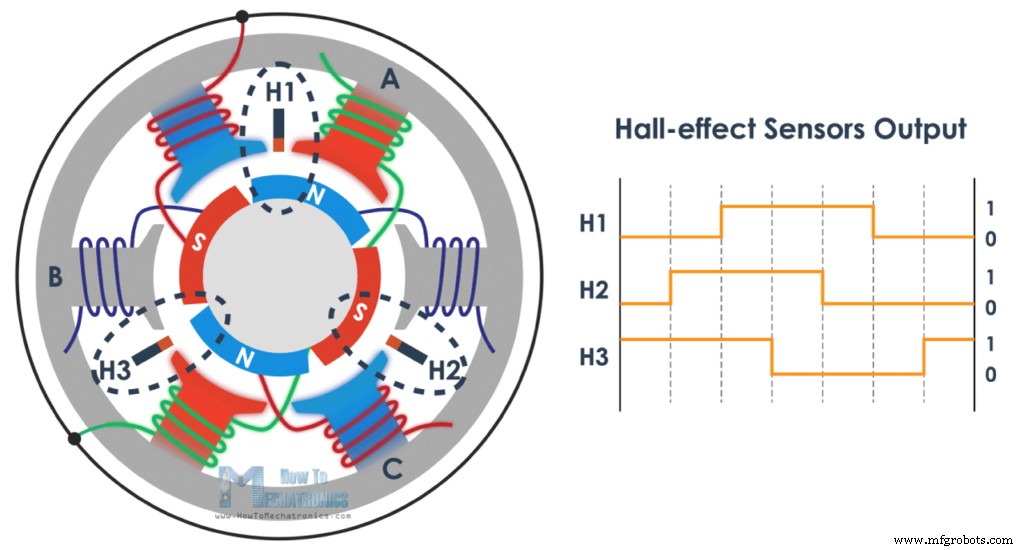
El primer método común es mediante el uso de sensores de efecto Hall integrados en el estator, dispuestos igualmente a 120 o 60 grados entre sí.
A medida que los imanes permanentes del rotor giran, los sensores de efecto Hall detectan el campo magnético y generan una lógica "alta" para un polo magnético o una lógica "baja" para el polo opuesto. De acuerdo con esta información, el ESC sabe cuándo activar la siguiente secuencia o intervalo de conmutación.
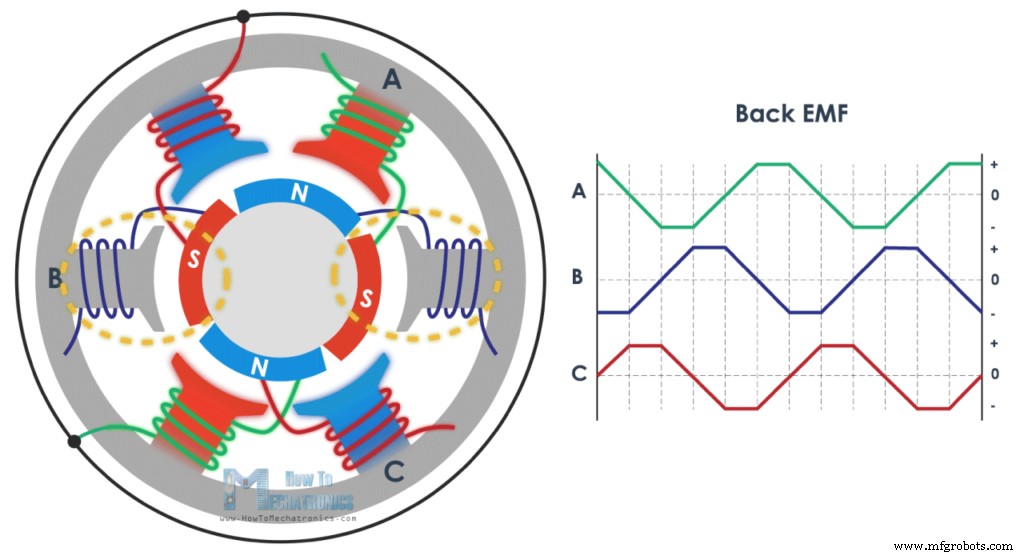
El segundo método común utilizado para determinar la posición del rotor es a través de la detección de la fuerza electromotriz trasera o EMF trasera. El EMF posterior ocurre como resultado del proceso exactamente opuesto de generar un campo magnético o cuando un campo magnético en movimiento o cambiante pasa a través de una bobina, induce una corriente en la bobina.
Entonces, cuando el campo magnético en movimiento del rotor pasa a través de la bobina libre, o la que no está activa, inducirá un flujo de corriente en la bobina y como resultado se producirá una caída de voltaje en esa bobina. El ESC captura estas caídas de voltaje a medida que ocurren y, en función de ellas, predice o calcula cuándo debe tener lugar el siguiente intervalo.
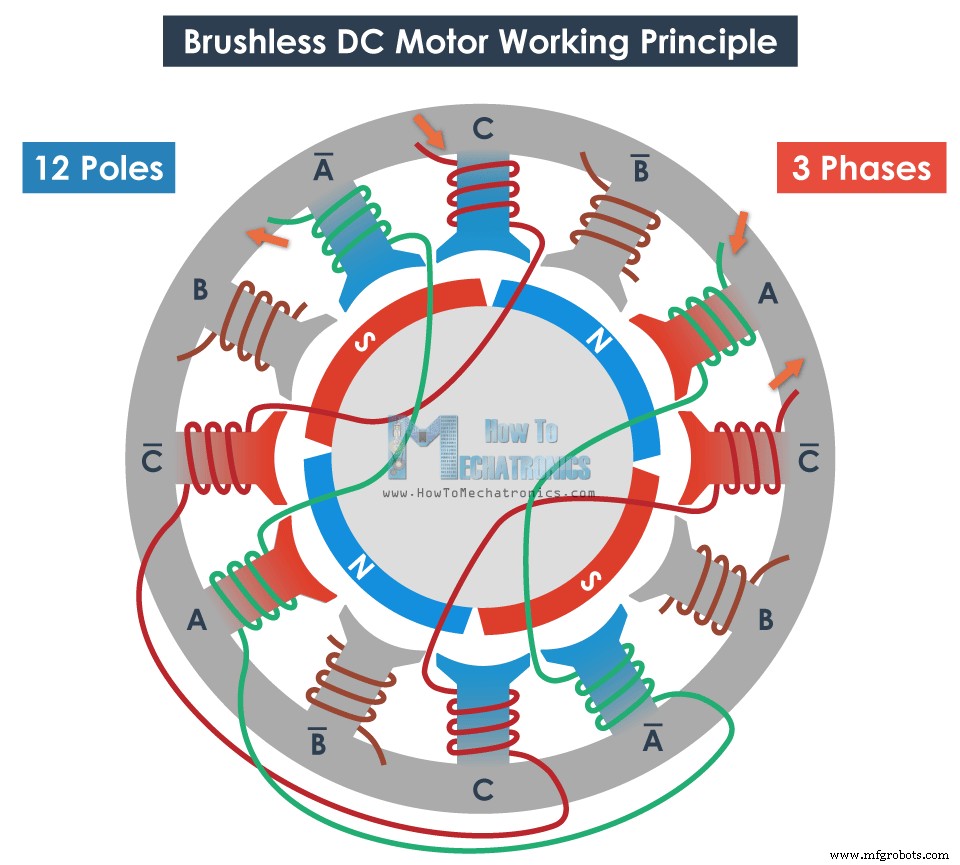
Ese es el principio de funcionamiento básico de los motores de CC sin escobillas y los ESC, y es lo mismo incluso si aumentamos la cantidad de polos tanto del rotor como del estator. Seguiremos teniendo un motor trifásico, solo que aumentará el número de intervalos para completar un ciclo completo.
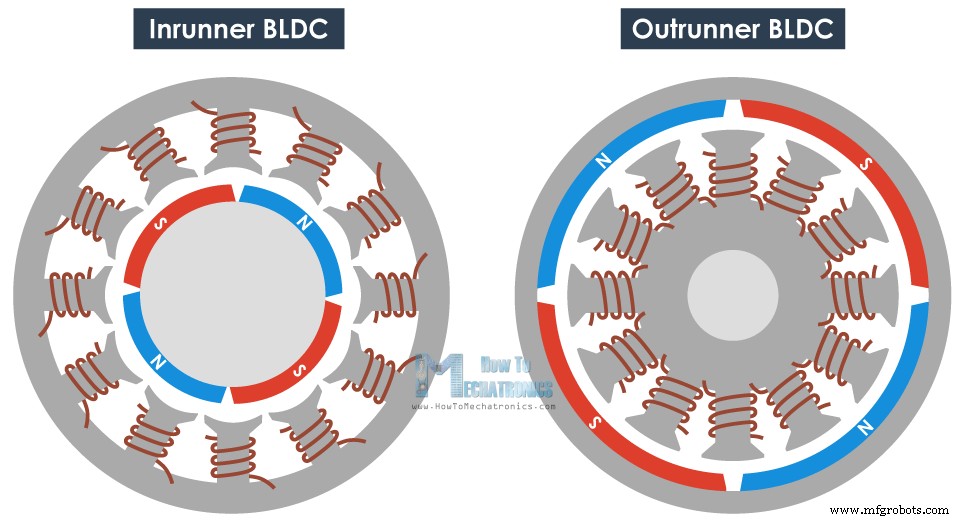
Aquí también podemos mencionar que los motores BLDC pueden ser inrunners o outrunners. Un motor sin escobillas inrunner tiene los imanes permanentes dentro de los electroimanes y viceversa, un motor outrunner tiene los imanes permanentes fuera de los electroimanes. Nuevamente, usan el mismo principio de funcionamiento y cada uno de ellos tiene sus propias fortalezas o debilidades.
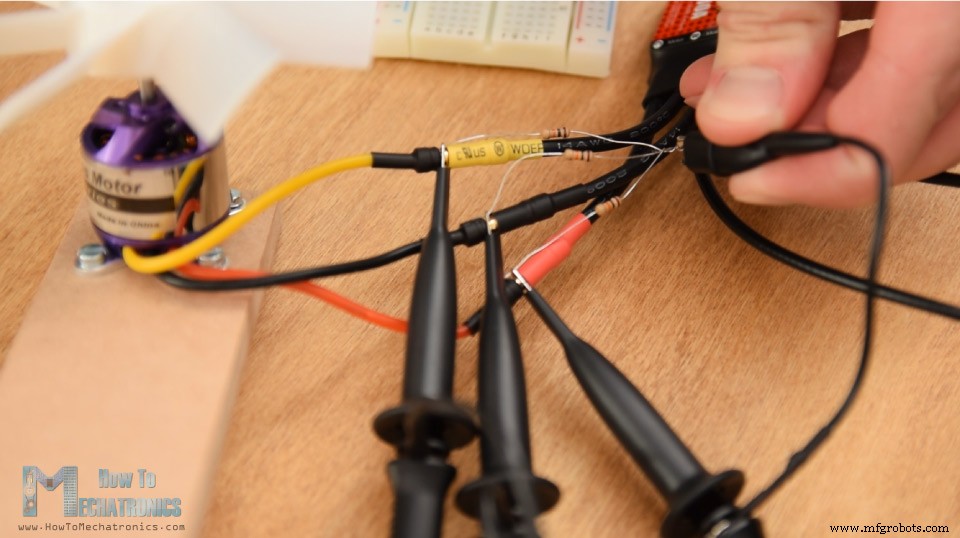
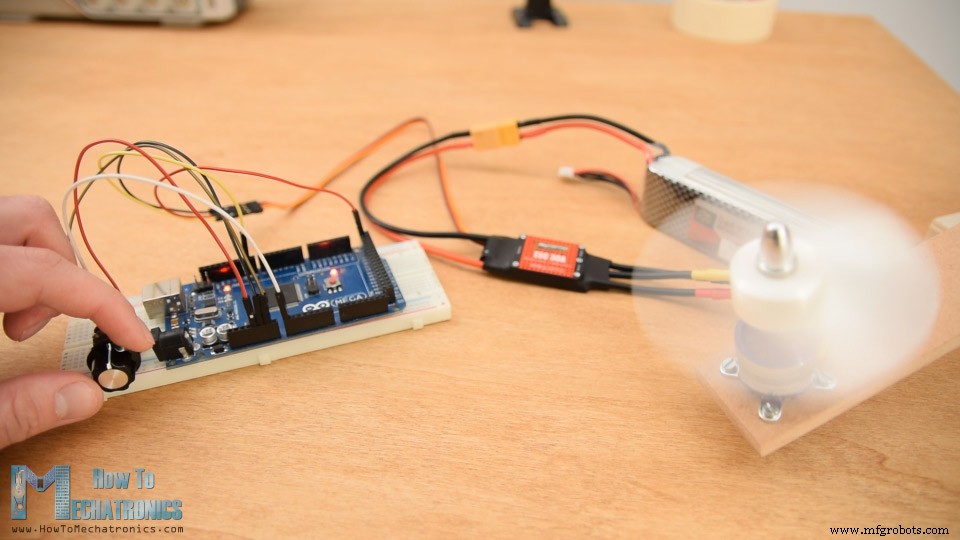
Ok, eso es suficiente teoría, así que ahora demostremos y veamos en la vida real lo que explicamos anteriormente. Para ello conectaremos las tres fases de un motor sin escobillas a un osciloscopio. Conecté 3 resistencias en un solo punto para hacer un punto neutro virtual y en el otro lado las conecté a las tres fases del motor BLDC.
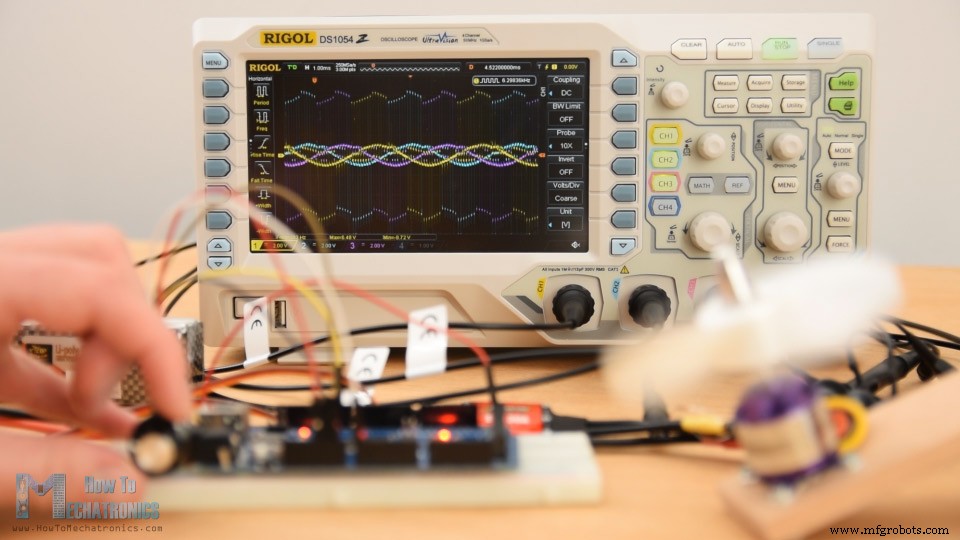
Lo primero que podemos notar aquí son las tres ondas sinusoidales. Estas ondas sinusoidales son en realidad el EFM posterior generado en las fases cuando no están activas.
Podemos ver que a medida que cambiamos las RPM del motor, la frecuencia de las ondas sinusoidales cambia y también su amplitud. Cuanto más altas son las RPM, más altas son la frecuencia y la amplitud de las ondas sinusoidales EMF posteriores. Sin embargo, lo que impulsa al motor son en realidad estos picos, que son las fases activas que generan el campo magnético cambiante.
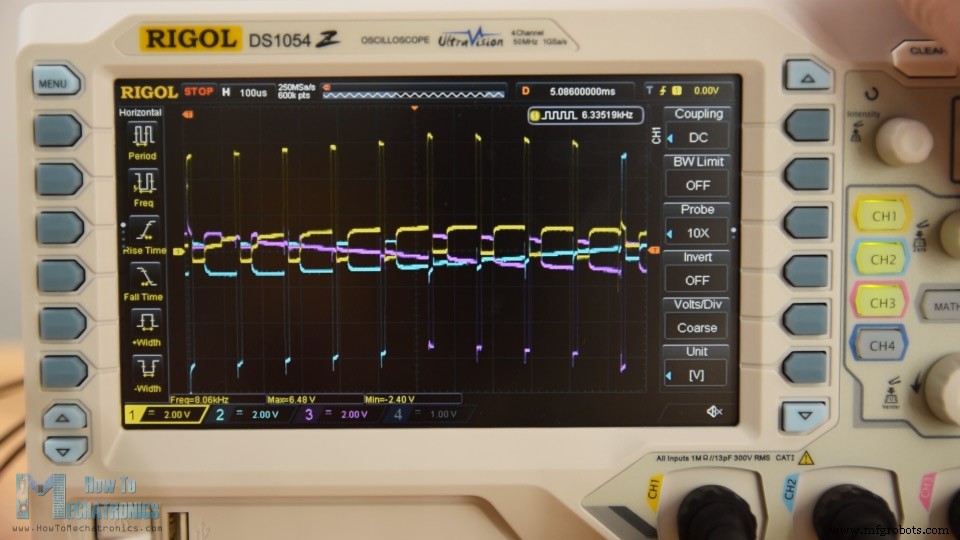
Podemos notar que en cada intervalo, hay dos fases activas y una inactiva. Por ejemplo, aquí tenemos activas la fase A y B, mientras que la fase C está inactiva. Entonces tenemos activas las fases A y C, mientras que la fase B está inactiva, y así sucesivamente.
Aquí me gustaría agradecer a Banggood.com por proporcionarme este osciloscopio. Es el Rigol DS1054Z y es uno de los mejores osciloscopios de nivel de entrada por su precio. Tiene cuatro canales de entrada, ancho de banda de 50 MHz, que se puede piratear a 100 MHz, tiene una frecuencia de muestreo de 1 GSa/s y una profundidad de memoria relativamente grande de 24 Mpts.
La pantalla es de 7 pulgadas y es realmente agradable y brillante. Cuenta con varias funciones matemáticas, filtros de paso bajo y paso alto, decodificación SPI e I2C y mucho más. Nuevamente, muchas gracias a Banggood.com y asegúrese de revisar este osciloscopio en su tienda.
Sin embargo, ese es el principio básico de funcionamiento del motor sin escobillas. En caso de que desee más ejemplos reales y aprender a controlar motores sin escobillas con Arduino, debe consultar la segunda parte de este tutorial.
Espero que hayas disfrutado este tutorial y hayas aprendido algo nuevo. Siéntase libre de hacer cualquier pregunta en la sección de comentarios a continuación y no olvide consultar mi colección de proyectos Arduino.Cómo funciona
Cómo funciona un ESC (controlador electrónico de velocidad)

Tecnología Industrial
- Introducción a los bloqueos de levas y cómo funcionan
- Introducción a los tornillos de ojo y cómo funcionan
- Introducción a los ojales y cómo funcionan
- ¿Qué es el moldeo por transferencia y cómo funciona?
- ¿Qué es una transmisión y cómo funciona?
- Cómo funciona un motor de CC con escobillas
- ¿Qué es la impresión 3D? - Tipos y cómo funciona
- ¿Qué es la soldadura por arco? - Tipos y cómo funciona
- ¿Qué es una fresadora CNC y cómo funciona?
- ¿Qué es un embrague industrial y cómo funciona?
- Cómo funcionan los robots de selección y colocación