


Investigadores desarrollan dedos robóticos para agarrar y soltar objetos en condiciones secas y húmedas
Un equipo de investigadores de la Universidad de Kanazawa ha desarrollado un sistema de control robótico, o puntas de los dedos, para agarrar y soltar objetos en condiciones secas y húmedas.
Los investigadores dicen que el estudio pudo verificar que "el agarre de objetos con las yemas de los dedos de fluidos de superficie suave con alta fricción se controlaba aplicando un lubricante adecuado".
Sin embargo, agregaron que era necesario realizar más experimentos en diversas condiciones para aplicar la tecnología de control actual a los entornos de fabricación.
No obstante, se espera que este estudio sea un paso adelante para realizar la automatización del trabajo de, por ejemplo, agarrar y soltar objetos en un espacio estrecho.
Los robots industriales ahora se usan ampliamente y son indispensables en la fabricación de automóviles y en otros campos. Las manos robóticas convencionales son adecuadas para agarrar objetos duros de forma fija, mientras que no es fácil agarrar objetos complicados o agarrar suavemente objetos blandos.
También es necesario, bajo diversas condiciones, responder a las características físicas de los objetos, como las características de la superficie:seca, húmeda, etc.
La punta de un dedo de superficie blanda de una mano robótica es deformable y puede agarrar un objeto de forma complicada con bastante facilidad, ya que el área de contacto puede agrandarse por la deformación de la superficie en respuesta a la forma del objeto.
Las yemas de los dedos de superficie blanda son muy eficaces para agarrar objetos blandos; incluso el tofu se puede agarrar.
Generalmente, sin embargo, la fricción superficial del material blando es alta, lo que dificulta la liberación. También es difícil soltar objetos en las posiciones deseadas, especialmente en los casos en que el espacio de trabajo es estrecho.
El grupo de investigación, dirigido por el profesor Tetsuyou Watanabe de la Universidad de Kanazawa, ha estado investigando la tecnología de control para agarrar objetos con las yemas de los dedos de las manos robóticas.
En el presente estudio, el grupo pretendía desarrollar un sistema de control de la fricción.
El grupo usó las suaves puntas de los dedos de una mano robótica para agarrar objetos; la liberación se logró aplicando (inyectando) un lubricante.
En este estudio, se empleó etanol absoluto (>99,5 %) como lubricante, ya que el etanol es químicamente seguro y fácil de secar y su tensión superficial es baja.
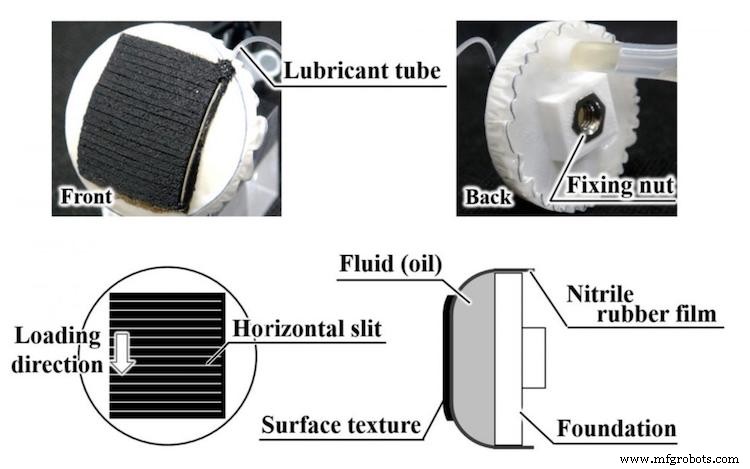
Como se ve en la Figura 1, se adhirió una película de caucho de nitrilo a los lados de la base de la punta del dedo para crear un espacio para rellenar con aceite de motosierra para hacer una "punta del dedo fluida".
Luego se unió una "textura" de silicona para recubrir la película de goma; el material de la “textura” era un sellador de silicona con hendiduras, cuyo intervalo era de 1,5 mm, perpendicular a la dirección de la carga.
Las hendiduras se introdujeron para una gran fricción en condiciones de humectación por agua y para esparcir el lubricante.
Con esta yema fluida se agarraron objetos de diversos materiales utilizados para utensilios de cocina y se comprobó que, al aplicar el lubricante, efectivamente se reducía la fricción.
La fricción se redujo tanto en condiciones secas como húmedas, mientras que dicho efecto lubricante no se observó en condiciones aceitosas.
A continuación, se realizó una simulación de tareas de embalaje de cajas. Se agarró una caja de papel con dos dedos fluidos por ambos lados.
La "textura" descrita anteriormente se adhirió a cada punta de los dedos fluidos. El agarre estable se confirmó colocando un peso en la caja de papel.
Después de retirar el peso, se inyectó lubricante en ambas yemas de los dedos, lo que provocó un deslizamiento hacia abajo de la caja de papel en un tiempo bastante corto (menos de 2,5 s), de modo que se completó la tarea de empaque de la caja de papel.
Como se muestra aquí, se adhirió una "textura" de alta fricción a la yema del dedo de fluido, y la inyección de un lubricante (aquí, etanol absoluto) redujo la fricción.
Por lo tanto, la liberación y colocación de un objeto en la posición deseada se logró controlando la fricción sin mover las yemas de los dedos.
Sistema de control de automatización
- Diseño de una centralita para un arrastrero de pesca
- Pinzas de inyección de combustible personalizadas con impresión 3D para un robot Pick and Place
- Essentium y Lehvoss se asocian para desarrollar materiales para la fabricación aditiva
- DSM y Nedcam desarrollarán nuevas aplicaciones para la impresión 3D de gran tamaño
- Sepro lanza aplicaciones para mejorar el software del robot
- Automatización para IML y moldes apilables
- Robot "artístico" en NPE
- 3 Ventajas de la simulación de robots para fabricantes y otros usuarios de robots
- Las noticias sobre robótica y automatización son buenas para ABB, dice el director general
- Fanuc y Plus One Robotics desarrollan soluciones de automatización para el cumplimiento del comercio electrónico
- AV&R y APN se asocian para desarrollar robótica para la fabricación aeronáutica