


Dispositivos de efecto Hall digitales (ON / OFF):interruptores y pestillos
Obtenga información sobre la polaridad del campo B, los interruptores unipolares, los interruptores omnipolares, los pestillos de efecto Hall y los interruptores bipolares en este artículo técnico.
Los interruptores y pestillos de efecto Hall son comparadores de campo magnético. Comparan la densidad de flujo magnético, a veces denominado campo B, con algunos umbrales preespecificados y emiten el resultado de la comparación como un valor digital de 1 bit. Hay cuatro categorías diferentes de sensores Hall digitales (encendido / apagado):interruptores unipolares, interruptores bipolares, interruptores omnipolares y pestillos.
Examinaremos la función de transferencia de cada tipo en detalle. Pero, antes de eso, me gustaría aclarar un concepto importante que se usará comúnmente en nuestra discusión:la polaridad de la densidad de flujo magnético.
¿Cómo definimos la polaridad del campo B?
Un dispositivo de efecto Hall es direccional. Solo detecta el componente de la densidad de flujo magnético que se encuentra a lo largo de su eje de sensibilidad. La Figura 1 muestra el eje de sensibilidad de dos paquetes de dispositivos Hall comunes.
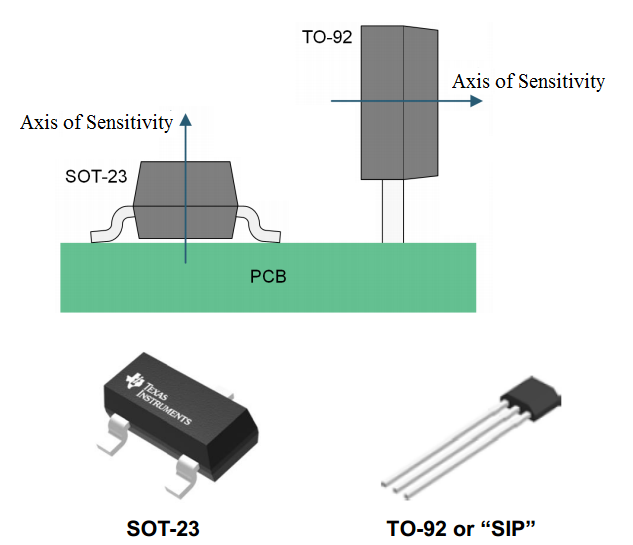
Figura 1. Imagen cortesía de Texas Instruments.
Si el campo magnético aplicado al dispositivo produce un componente en la dirección del eje de sensibilidad, se supone que el campo B es positivo. Si el campo produce un componente en la dirección opuesta al eje de sensibilidad, se supone que es negativo. La Figura 2 muestra un ejemplo donde la densidad de flujo magnético tiene polaridad negativa en la ubicación del sensor (A).
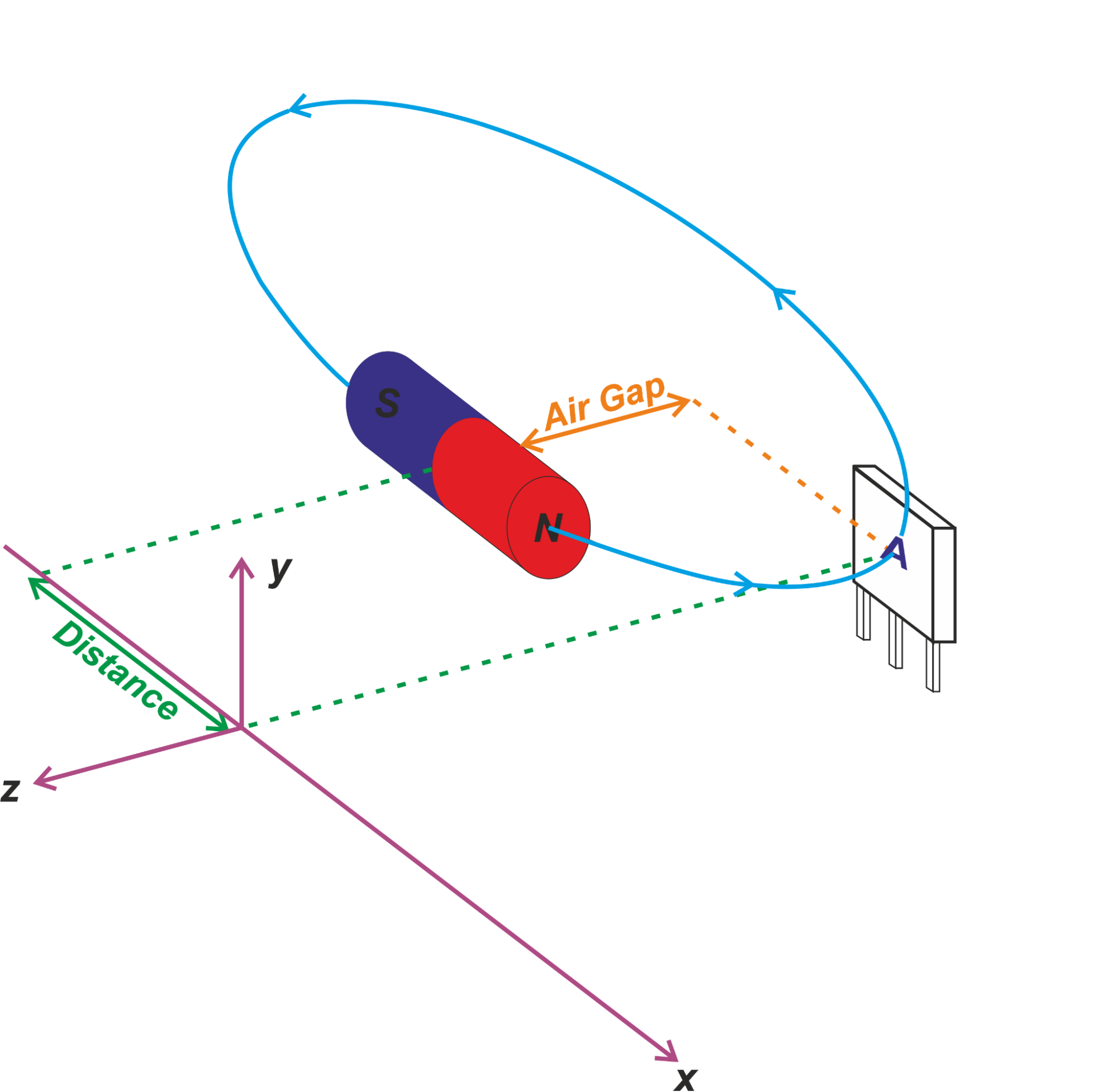
Figura 2
En el ejemplo anterior, asumimos que el eje de sensibilidad del dispositivo está en la dirección del eje z. Dado que las líneas del campo magnético de un imán van del polo norte al polo sur, el campo B detectado por el dispositivo es negativo.
También existe una convención con respecto a la polaridad del campo B que suelen utilizar los fabricantes de sensores Hall. Consideran el campo magnético producido por un imán del polo sur como positivo y el del polo norte como negativo. Esto se basa en la suposición de que la cara de la marca del sensor está hacia el imán. La cara de la marca es la superficie frontal del sensor donde puede encontrar el número de pieza del dispositivo, etc. Considerando los ejes de sensibilidad que se muestran en la Figura 1, puede verificar que al presentar el polo sur del imán a la cara de la marca del sensor se creará un campo magnético en la dirección del eje de sensibilidad (campo positivo). De manera similar, un polo norte creará un campo magnético negativo. Si presentamos los polos magnéticos en la parte posterior del paquete del sensor (no en la cara de la marca del paquete), ¡la convención anterior ya no será válida!
Una nota final para terminar esta discusión:muchos dispositivos Hall son unidimensionales y detectan el campo B a lo largo de un solo eje de sensibilidad (como los que se muestran en la Figura 1). Sin embargo, existen circuitos integrados de sensores más sofisticados que emplean más de un elemento Hall para admitir tres ejes de sensibilidad (un sensor tridimensional). Ahora, examinemos la función de transferencia de los diferentes tipos de dispositivos Hall digitales (encendido / apagado).
Conmutadores unipolares
La funcionalidad de un interruptor unipolar se ilustra en la Figura 3.
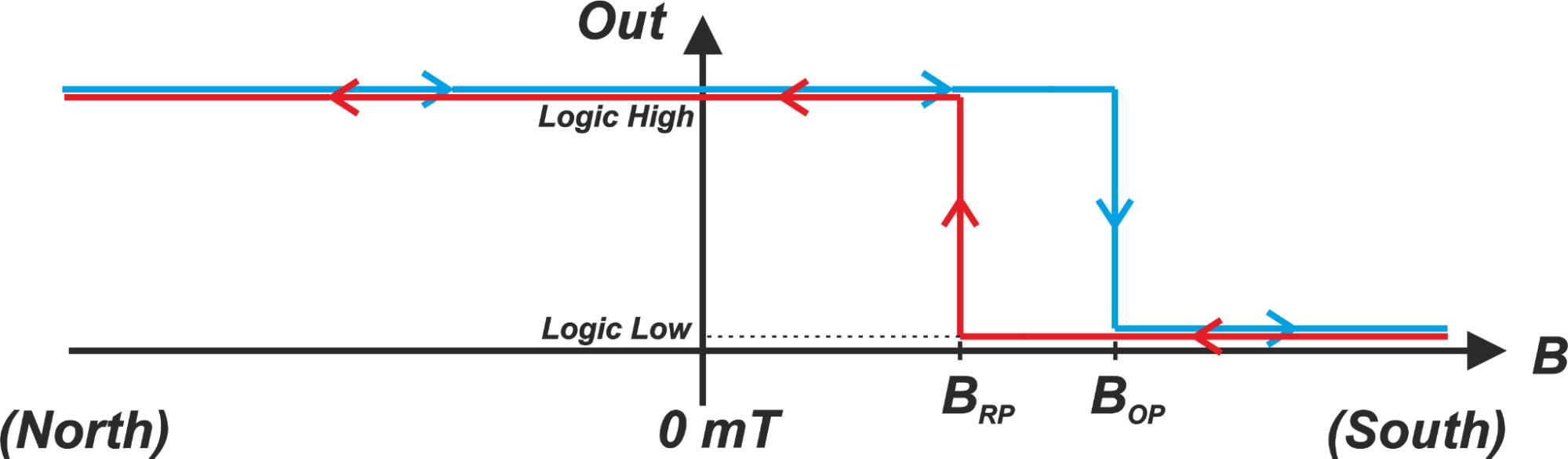
Figura 3
Este dispositivo se denomina interruptor unipolar porque sus umbrales de conmutación (B RP y B OP ) están en la región positiva del eje del campo B. El estado de salida solo puede cambiar en respuesta a un campo de polaridad sur. Un campo de polaridad norte, o negativo, no tiene ningún efecto en el sensor; explicando el nombre "interruptor unipolar".
Veamos cómo responde el dispositivo a los cambios en el campo magnético. Suponga que se aplica un campo de polaridad norte al sensor y aumentamos gradualmente el campo aplicado (lo hacemos más positivo). Para B OP , el dispositivo está apagado y la salida es lógica alta. A medida que el campo magnético aplicado se vuelve más grande (o más positivo) que el valor umbral B OP , el dispositivo se enciende y la salida cambia al estado opuesto (lógica baja). La función de transferencia para un campo B creciente se muestra mediante la curva azul en la figura.
¿Cómo responde el dispositivo activado a un campo decreciente? Para un campo magnético decreciente, el dispositivo permanece encendido (lógica baja) hasta que el campo magnético aplicado sea menor que B RP . Esto se muestra mediante la curva roja en la figura anterior. Para B RP , el dispositivo se apaga y la salida pasa a lógica alta.
Por tanto, el umbral de conmutación para un campo magnético creciente es diferente del umbral de conmutación para un campo decreciente. Esta histéresis está diseñada intencionalmente para tener una conmutación limpia en la salida. Las vibraciones mecánicas en un sistema de detección de efecto Hall, así como el ruido eléctrico y electromagnético, pueden introducir ruido en el campo magnético detectado. El ruido del campo B alrededor de los niveles de umbral puede provocar fluctuaciones indeterminadas que cambian rápidamente en la salida del sensor Hall (Figura 4). Estas fluctuaciones no deseadas se eliminan haciendo que los umbrales de los campos crecientes y decrecientes sean ligeramente diferentes.
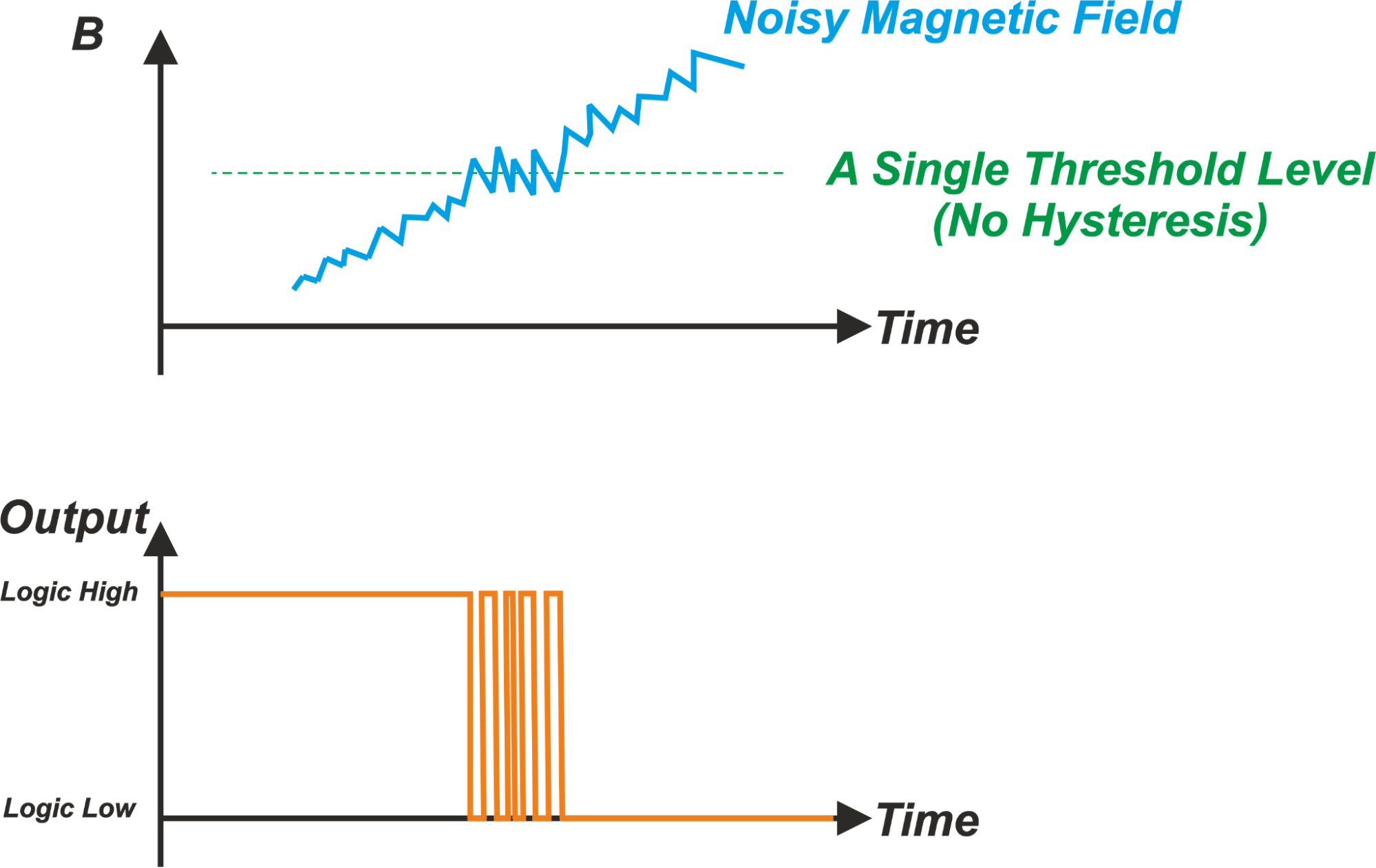
Figura 4. Sin histéresis, la salida puede ser indeterminada alrededor del umbral.
Como vimos anteriormente, el funcionamiento de un interruptor unipolar se puede describir mediante dos parámetros diferentes:B OP y B RP . B OP significa el "punto de operación magnético" o simplemente el "punto de operación". Esto indica el nivel de umbral para un campo magnético creciente por encima del cual se enciende el sensor. B RP es el "punto de liberación magnética" o simplemente el "punto de liberación". Indica el nivel de umbral para un campo magnético decreciente. Para B RP , el dispositivo está apagado. La histéresis está representada por B HYS que viene dado por:
B HYS =B OP - B RP
A continuación, analizaremos que se puede utilizar una notación similar para describir el funcionamiento de los otros tipos de dispositivos Hall digitales.
Tenga en cuenta que, según el diseño electrónico del sensor, los estados de encendido y apagado de la salida del sensor pueden ser opuestos a los que se muestran en la Figura 3 (lógica baja cuando el dispositivo está apagado y lógica alta cuando está encendido).
Conmutadores omnipolares
La función de transferencia de un interruptor omnipolar se muestra en la Figura 5.
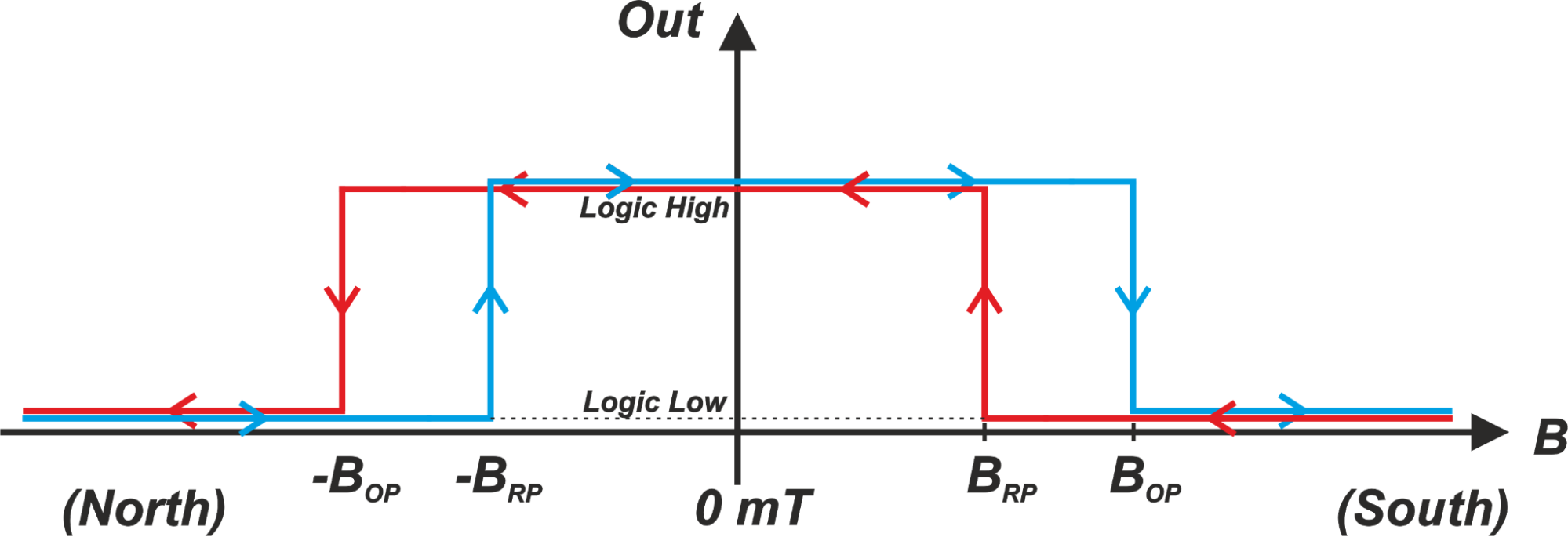
Figura 5
Un interruptor omnipolar se enciende con un campo positivo fuerte o un campo negativo fuerte. Como se muestra en la figura, cuando la magnitud del campo magnético se vuelve mayor que B OP (| B |> B OP ), el dispositivo se enciende y la salida pasa a lógica baja. Cuando la magnitud del campo B sea menor que B RP (| B | RP ), el sensor se apaga y la salida pasa a lógica alta. La curva azul muestra la salida del sensor cuando el campo B cambia de un valor negativo grande a un valor positivo grande. La curva roja muestra la salida de un campo B decreciente. Con un interruptor omnipolar, la magnitud del punto de operación es la misma para los campos B positivos y negativos. De manera similar, la magnitud del punto de liberación es la misma para los campos de polaridad norte y sur.
Cierres de efecto Hall
La función de transferencia de un pestillo de efecto Hall se muestra en la Figura 6.
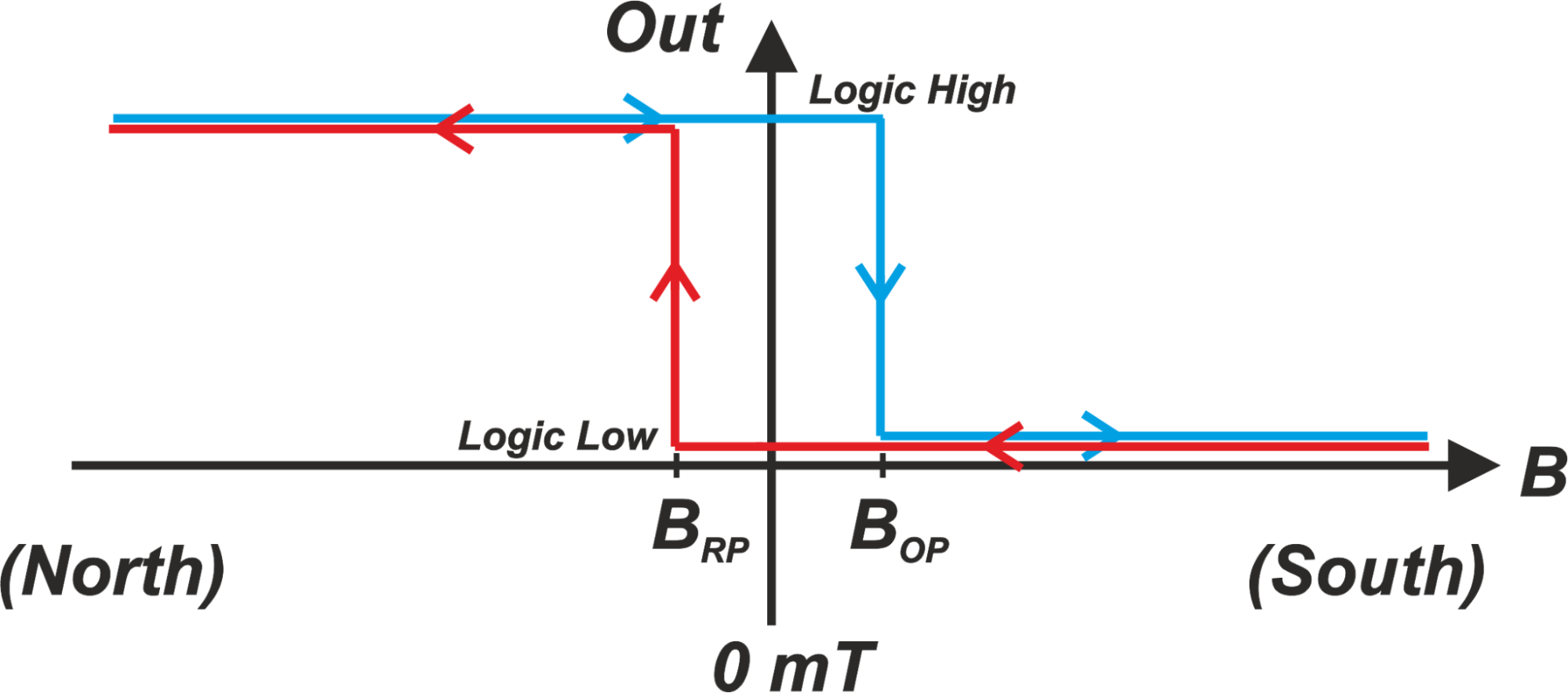
Figura 6
Un dispositivo de cierre tiene un B OP positivo y una B RP negativa . Se enciende con un campo positivo suficientemente grande (B> B OP ) y se apaga ante la presencia de un campo de polaridad norte suficientemente fuerte (B RP ). La histéresis del dispositivo incluye la región alrededor de B =0 y varía de BRP a B OP . Sabemos que el dispositivo no cambia de estado en la región de histéresis. Supongamos que aplicamos un campo positivo suficientemente fuerte para activar el sensor. Si eliminamos este campo, el dispositivo detectará un campo magnético de B =0. Aunque no se aplica ningún campo al sensor, este mantendrá su estado anterior y permanecerá encendido. Solo cambiará de estado si aplicamos un campo fuerte con polaridad opuesta. Cuando se aplica un campo magnético débil al sensor (B RP OP ), el sensor conserva su salida producida previamente. Esto explica por qué este dispositivo Hall se llama pestillo.
Mientras que un interruptor unipolar u omnipolar puede cambiar de estado a medida que cambia la amplitud del campo aplicado, un pestillo puede detectar la polaridad del campo B (siempre que el campo aplicado tenga suficiente fuerza). Los pestillos se utilizan generalmente con imanes de anillo en aplicaciones giratorias, por ejemplo, para detectar la posición de un eje giratorio. Esto se muestra en la Figura 7.
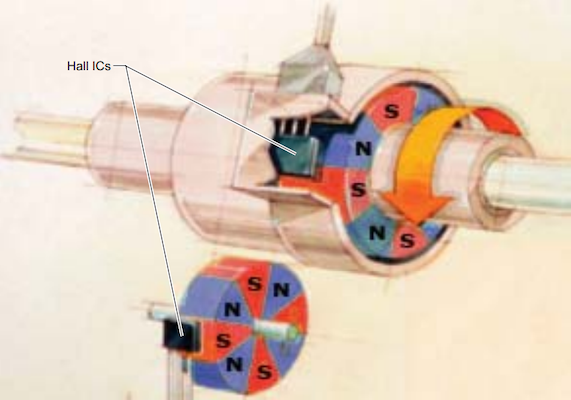
Figura 7. Imagen cortesía de Allegro.
A medida que gira el eje, la polaridad del campo magnético detectado cambia y el sensor se enciende / apaga en consecuencia. Con un dispositivo de cierre, los puntos de operación y liberación son iguales en magnitud pero tienen polaridades opuestas (B OP ≠ -B RP ).
Interruptores bipolares
Con un interruptor bipolar, solo conocemos el valor del punto de operación "máximo" y el punto de liberación "mínimo". Sin embargo, se desconocen los valores umbral exactos. En consecuencia, el funcionamiento exacto del dispositivo puede cambiar de una unidad a otra. La Figura 8 muestra un ejemplo donde el máximo B OP es de unos 300 gauss y un mínimo de B RP es de aproximadamente -300 gauss.
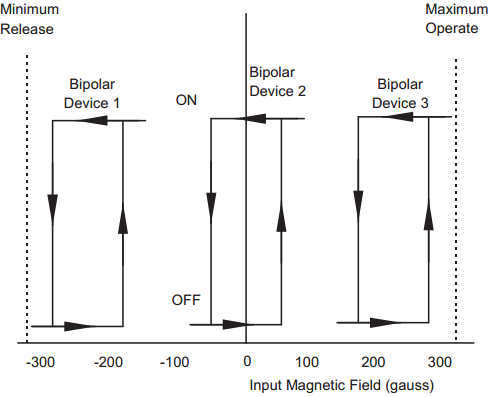
Figura 8. Imagen cortesía de Honeywell.
Para "Dispositivo 1", ambos B OP y B RP son negativos. Para el "Dispositivo 3", ambos umbrales son positivos. Otro ejemplo, "Dispositivo 2", tiene una respuesta similar a la de un pestillo. Tiene un B OP positivo y B RP negativo . Aunque la función de transferencia del "Dispositivo 2" se asemeja a la de un pestillo, debe tenerse en cuenta que los puntos de operación y liberación de un interruptor bipolar pueden no ser iguales en magnitud (B OP - B RP ).
Como puede ver, son posibles tres funciones de transferencia diferentes incluso para dispositivos del mismo tipo que se fabrican juntos en el mismo lote. De acuerdo con la nota de aplicación “Conceptos básicos del CI de efecto Hall del interruptor bipolar” de Allegro, solo alrededor del 10% de los interruptores bipolares tienen una función de transferencia similar a la del “Dispositivo 1” y el “Dispositivo 3”. El resto tiene una respuesta de tipo pestillo. En comparación con un dispositivo de pestillo, un interruptor bipolar puede ofrecer una zona de histéresis más estrecha (B HYS =B OP - B RP ) y, en consecuencia, una mayor sensibilidad. Sin embargo, dado que el modo de funcionamiento de un interruptor bipolar puede cambiar de una unidad a otra, debemos asegurarnos de que el sistema funcione correctamente para todos los valores posibles de B OP y B RP (dentro de los límites de rango especificados).
Para ver una lista completa de mis artículos, visite esta página.
Sensor
- Campos eléctricos y capacitancia
- Electromagnetismo
- Unidades magnéticas de medida
- Campos magnéticos e inductancia
- Compass Sensor - Trabajo y aplicaciones
- Fundamentos de los sensores magnéticos digitales
- Los dispositivos aumentan la potencia PoE sobre los interruptores y cables existentes
- Cámara digital estándar e IA para monitorear la humedad del suelo
- Detección de campos magnéticos
- ¿Qué es el blindaje magnético?
- Descripción del sensor de efecto Hall