


Impulsar motores en sistemas IoT a batería
Aprenda técnicas de diseño de controladores de motor para ayudar a prolongar la vida útil de la batería en sistemas de motor alimentados por batería.
Muchos sistemas que funcionan con baterías y aplicaciones de Internet de las cosas (IoT), como medidores inteligentes, productos sanitarios inteligentes, timbres con video, juguetes robóticos, productos de higiene personal y cerraduras electrónicas, contienen un motor, solenoide o relé. La interacción entre la batería y la física del motor produce algunos desafíos de diseño interesantes, como operar el sistema de manera confiable a medida que cambia el voltaje de la batería, minimizar la energía de reserva para aumentar la vida útil del sistema y suministrar grandes corrientes al motor durante el arranque y la parada.
En este artículo, ofreceré algunos consejos para ayudar a superar estos desafíos de diseño.
Descripción general de los sistemas de motor a batería
El rango de voltaje de la batería disponible para el controlador del motor depende de la química de la batería, la profundidad de descarga, la temperatura, la corriente de carga y el número de celdas de la batería conectadas en serie o en paralelo. Aunque el modelado de baterías es una ciencia compleja, comencemos con un modelo de batería simple usando el voltaje de circuito abierto (V OCV ), resistencia interna de la batería (R BAT ) y el voltaje del terminal de la batería (V BAT ), como se muestra en la Figura 1 .
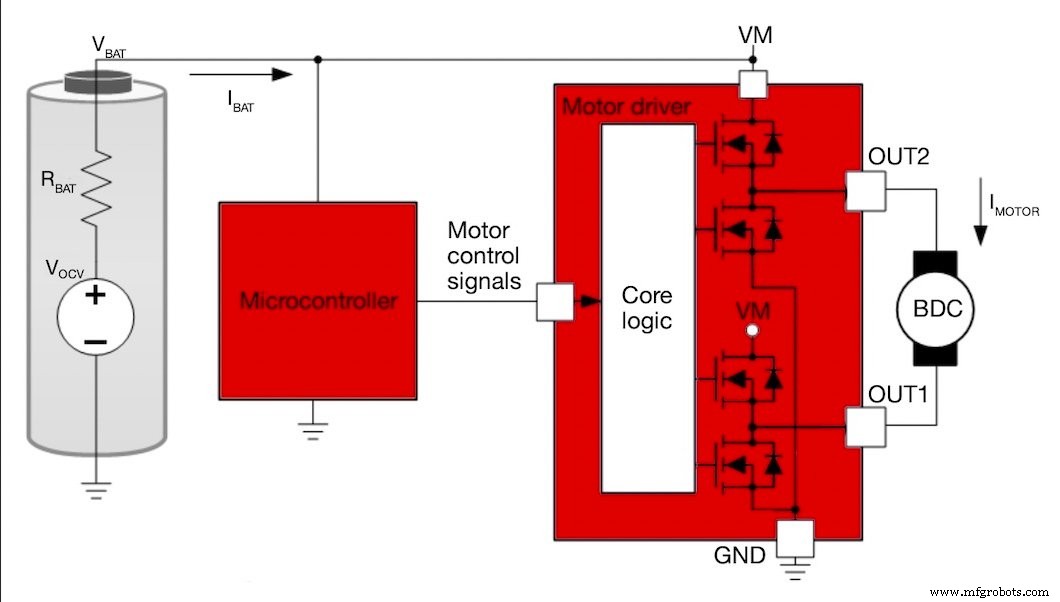
Figura 1. Diagrama de bloques de un sistema alimentado por batería con un controlador de motor y un motor.
Tabla 1 muestra algunos ejemplos de rangos de voltaje de la batería para varias químicas de la batería.
| Química de la batería y apilado | V BAT de batería completamente cargada | V BAT de batería agotada | R BAT | Capacidad |
| 2 AA (alcalinas), Duracell OP1500 | 1,7 V / celda 3,4 V en total | 0,8 V / celda 1,6 V en total | 100-250 mΩ / celda 200-500 mΩ en total | 2400 mAh * |
| 3 AAA (alcalinas), Panasonic LR03AD | 1,55 V / celda 4,65 V en total | 0,8 V / celda 2,4 V en total | 135 mΩ / celda (promedio) 405 mΩ en total (promedio) | 2640 mAh |
| 4 AA (alcalinas), Energizer E91 | 1,5 V / celda 6 V / celda | 0,8 V / celda 3,2 V en total | 150-300 mΩ / celda (nuevo) 600-1200 mΩ en total (nuevo) | 2500 mAh * |
| 1 ion de litio, Panasonic NCR18650BF | 4.2 V | 2,5 V | 77 mΩ * | 3200 mAh |
| 2 polímeros de litio, Farnell SR674361P | 4.2 V / celda 8.4 V en total | 2,75 V / celda 5,5 V en total | 160 mΩ / celda 320 mΩ en total | 2000 mAh |
* Parámetros calculados a partir de otros parámetros de la hoja de datos de la batería
Tabla 1. Parámetros aproximados de la batería para diversas químicas y acumulaciones de la batería.
R BAT y V OCV son contribuyentes clave de V BAT cambiando la vida útil de la batería. A medida que la carga de la batería se agota, V OCV disminuye y R BAT aumenta. A medida que la carga extrae corriente de la batería (I BAT ), V BAT disminuye debido a la caída de voltaje en R BAT .
Figura 2 muestra la relación entre V OCV , R BAT y yo BAT durante la vida útil de la batería.
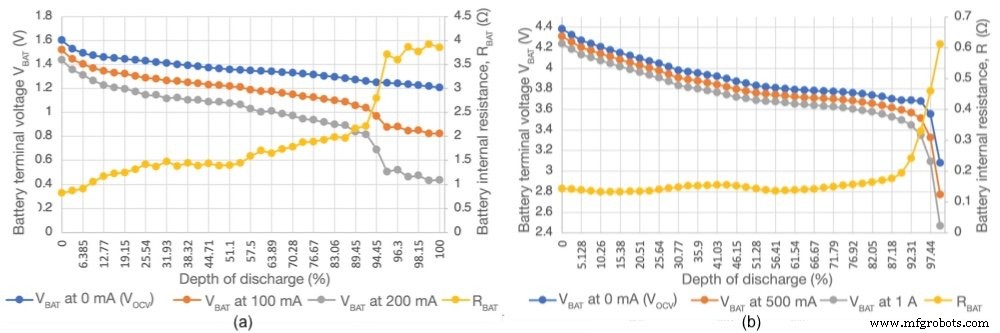
Figura 2. Gráficos de VBAT y RBAT para (a) alcalinos e iones de litio (b) baterías para diversas corrientes de carga de batería (IBAT) según los datos de la base de datos de identificación química de TI.
La profundidad de descarga (DoD) representa la vida útil de la batería como un porcentaje con respecto a la capacidad total de carga de la batería expresada en miliamperios hora (mAh). Un DoD al 100% representa una batería completamente descargada.
Diseño para una V BAT amplia Rango
Porque V BAT cambios con DoD y I BAT , la clasificación del riel de suministro para un controlador de motor debe adaptarse a un rango de posibles voltajes de batería. Por ejemplo, muchos controladores de motor diseñados para sistemas de 24 V tienen un riel de suministro mínimo de 4.5 V. Con cuatro baterías alcalinas conectadas en serie, un controlador de motor con una clasificación de suministro mínima de 4.5 V puede inhabilitarse mediante el bloqueo por subtensión antes de que las baterías estén completamente desagüe.
El DRV8210 y DRV8212 de Texas Instruments (TI) son ejemplos de controladores de motor diseñados para aplicaciones alimentadas por baterías con una clasificación de suministro de 1,65 V a 11 V. Esto se adapta al voltaje máximo para una pila de baterías de litio de dos celdas (8,4 V) o una pila de pilas alcalinas de dos celdas casi descargada (1,65 V).
Diseño para el modo de espera de bajo consumo
Los sistemas que funcionan con baterías pasan la mayor parte de su vida operativa en un estado de espera. Por ejemplo, los consumidores pueden operar persianas motorizadas solo dos veces al día, o bloquear y desbloquear una cerradura electrónica hasta 20 veces al día. La válvula de un medidor de gas o de agua solo puede activarse una vez al año. La corriente de reserva del sistema en general debe ser baja para lograr una vida útil prolongada de la batería en estos sistemas.
Agregar interruptores de carga en los rieles de suministro de dispositivos periféricos en el sistema es una forma de mantener baja la corriente de reserva. Otra forma es utilizar dispositivos con bajas corrientes de reposo optimizados para aplicaciones de batería. Los modelos DRV8210 y DRV8212 tienen corrientes de reposo <84,5 nA para ayudar a reducir el consumo de corriente en reposo del sistema. Otras formas de reducir la corriente de espera del sistema son eliminar los divisores de resistencias y configurar los pines lógicos del dispositivo con resistencias desplegables a 0 V cuando no estén en funcionamiento.
Gestión de grandes corrientes para reducir el consumo de energía y aumentar la vida útil
Las grandes corrientes de los motores crean dos problemas en los sistemas de baterías:usan energía de manera improductiva y pueden hacer que el sistema entre prematuramente en una condición de bloqueo de batería baja debido a la caída de voltaje en R BAT . Hay dos causas principales de las grandes corrientes de motor:la corriente de entrada durante el arranque del motor y la corriente de bloqueo. Figura 3 muestra un ejemplo de estas corrientes.
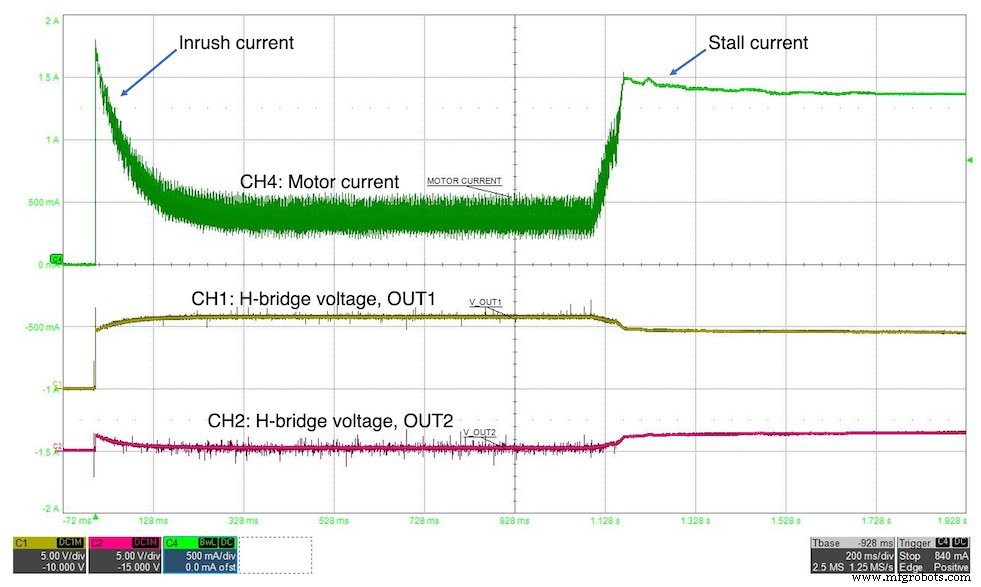
Figura 3. Corrientes de entrada y parada.
La implementación de una rutina de arranque suave para el motor aumentando el ciclo de trabajo de modulación de ancho de pulso puede mitigar la gran corriente de irrupción durante el arranque del motor. Figura 4 muestra ejemplos de implementaciones de arranque suave y arranque suave para una pila agotada de cuatro baterías AAA.
En la Figura 4 (a) , la corriente de irrupción del motor hace que el voltaje de la batería caiga durante un arranque difícil debido a la caída de voltaje en R BAT . Si este sistema se reinicia o entra en un estado de bloqueo por bajo voltaje alrededor de 3,5 V, el motor no podrá funcionar más allá del arranque inicial.
Figura 4 (b) muestra cómo el uso de un arranque suave provoca una caída de voltaje más baja en el riel de suministro, lo que puede ayudar a lograr un poco más de vida operativa en un sistema con una batería agotada.
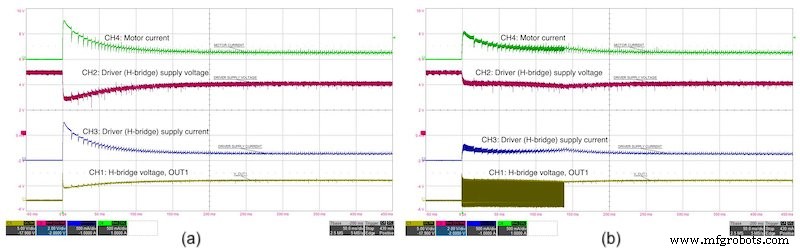
Figura 4. Difícil: (a) y arranque suave (b) corriente de entrada en cuatro baterías AAA agotadas en serie utilizando el DRV8210. La rutina de arranque suave que se muestra aquí aumenta el ciclo de trabajo de 0% a 100% durante el arranque del motor.
Para ayudar a controlar las corrientes de bloqueo, agregar una resistencia de detección de corriente puede ayudar al microcontrolador a detectar un bloqueo y deshabilitar el controlador del motor antes de generar grandes corrientes de bloqueo durante un largo período de tiempo. Las condiciones de pérdida pueden ocurrir debido a un bloqueo mecánico involuntario o la carga mecánica que alcanza un tope final (como un cerrojo completamente accionado en una cerradura inteligente).
Figura 5 muestra una implementación de sistema de ejemplo usando el DRV8212.
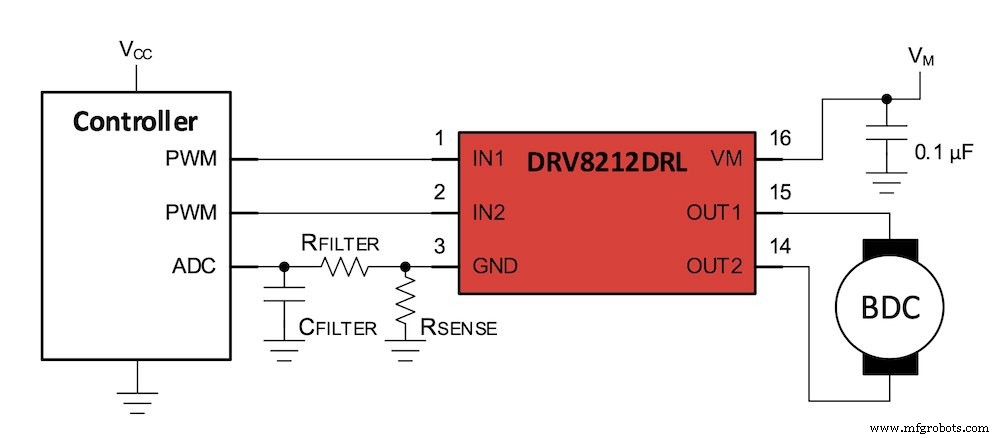
Figura 5. Ejemplo de diagrama de bloques de una implementación de detección de bloqueo con el DRV8212.
El convertidor de analógico a digital del microcontrolador mide el voltaje de la resistencia de detección y compara ese voltaje con un umbral almacenado en el firmware. Si la medición de corriente excede el umbral durante un cierto período de tiempo, el microcontrolador desactiva el controlador del motor para ahorrar energía. Es importante configurar la duración del tiempo para detectar un bloqueo de modo que la corriente de entrada no active accidentalmente la detección de bloqueo.
Figura 6 muestra un perfil de corriente del motor durante una condición de bloqueo con detección de bloqueo implementada, mientras que la Figura 3 muestra la forma de onda de la corriente del motor sin detección de bloqueo.
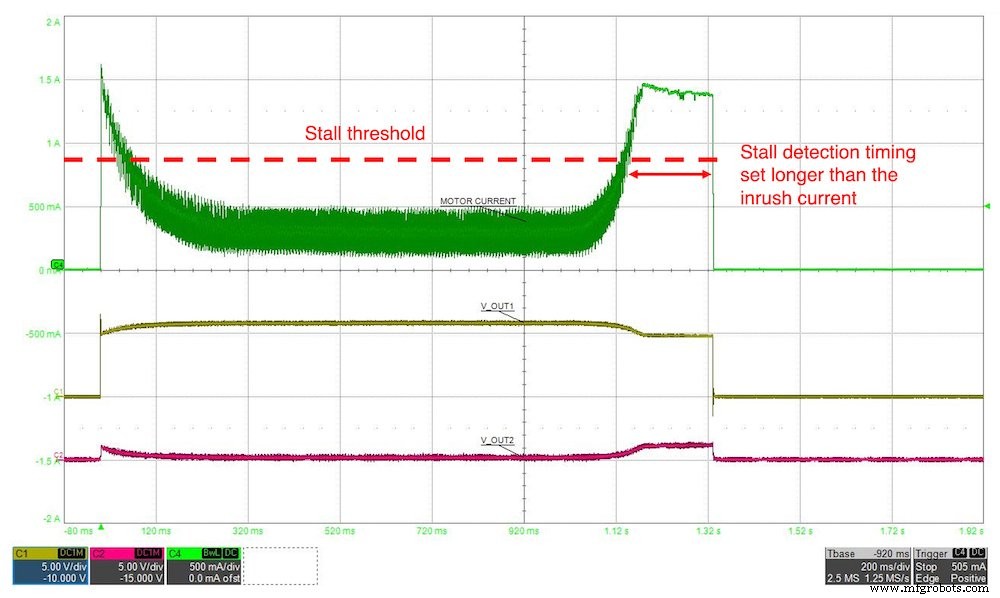
Figura 6. Perfiles de corriente del motor con detección de bloqueo.
Los fabricantes de baterías miden la capacidad de la batería en mAh, por lo que limitar tanto la magnitud de la corriente de entrada como la duración de la corriente de bloqueo ayuda a prolongar la vida útil de la batería.
Conclusión
Puede ser un desafío diseñar sistemas alimentados por baterías que utilicen motores debido a la vida útil limitada de la batería, la variación de voltaje de la batería y las grandes corrientes de motor. El uso de un controlador de motor clasificado para el rango de voltaje de la batería facilita los esfuerzos de diseño al eliminar convertidores impulsores adicionales y acomodar el voltaje de funcionamiento mínimo de la batería.
Minimizar la corriente de espera general del sistema y usar un controlador de motor con un modo de suspensión de bajo consumo reduce el consumo de energía desperdiciada de la batería. Tanto las técnicas de arranque suave como las de detección de bloqueo también pueden ayudar a aumentar la vida útil de las aplicaciones de la batería al reducir la magnitud y duración de las grandes corrientes de motor en el sistema.
Mediante el uso de estas técnicas, los diseñadores de sistemas pueden prolongar la vida útil de los sistemas que funcionan con baterías, como productos sanitarios inteligentes, persianas motorizadas, cerraduras electrónicas inteligentes y otros.
Los artículos de la industria son una forma de contenido que permite a los socios de la industria compartir noticias, mensajes y tecnología útiles con los lectores de All About Circuits de una manera que el contenido editorial no es adecuado. Todos los artículos de la industria están sujetos a estrictas pautas editoriales con la intención de ofrecer a los lectores noticias útiles, experiencia técnica o historias. Los puntos de vista y las opiniones expresados en los artículos de la industria son los del socio y no necesariamente los de All About Circuits o sus redactores.
Tecnología de Internet de las cosas
- Examen de IoT celular:costo, batería y datos
- La fabricación inteligente y el IoT están impulsando la próxima revolución industrial
- La tecnología LoRa está impulsando la adopción de IoT, cambiando vidas
- Un liderazgo sólido está impulsando la adopción de IoT
- Seis pasos para proteger los sistemas integrados en IoT
- Donde lo antiguo se encuentra con IoT, integración SaaS
- ¿Pueden los sistemas ERP y MES mantenerse al día con IIoT?
- ¿Qué es la seguridad de IoT?
- La asociación apunta a una duración ilimitada de la batería del dispositivo IoT
- IoT industrial no es la panacea que nos prometieron... todavía
- Aplicaciones de los sistemas de monitoreo de la calidad del aire por infusión de IoT industrial