


Factores clave en el diseño del control de velocidad electrónico de un dron
La clave del diseño de un dron es la capacidad de controlar la velocidad y la rotación del motor. La mayoría de los drones funcionan con motores de CC sin escobillas, que requieren una regulación constante de la velocidad y la dirección de rotación. Un módulo de control electrónico de velocidad (ESC) realiza estas funciones e incluye una etapa de suministro de energía, un circuito sensor de corriente, un microcontrolador y una interfaz de comunicación con el sistema de control de vuelo, por lo que es fundamental para los drones. Este artículo analiza los elementos importantes a considerar al diseñar un ESC, así como las soluciones de desarrollo del mercado.
Control de motor
El diseño de un ESC requiere una cuidadosa evaluación y análisis de características que se pueden resumir de la siguiente manera:
- Batería instalada en el dron
- Motores
- Presupuesto disponible
- Compatibilidad electromagnética (EMC) e inmunidad a interferencias
Se pueden instalar dos tipos de motores sin escobillas en drones:motores de corriente continua sin escobillas (BLDC) y motores de corriente alterna sin escobillas (BLAC), también conocidos como motores síncronos de imanes permanentes (PMSM). La elección del tipo de motor a utilizar depende del algoritmo de control elegido, que puede ser control trapezoidal o control orientado al campo (FOC). El algoritmo de control del motor trapezoidal tiene las siguientes características principales:
- Control del motor basado en una secuencia de conmutación de seis fases
- Detección del ángulo magnético del rotor, utilizado para establecer el ángulo correcto; cada paso corresponde a un ángulo de 60 °
- En los sistemas de control sin sensores, el ángulo de conmutación se estima midiendo el voltaje de la fase EMF trasera
El algoritmo de control FOC, por otro lado, tiene las siguientes características:
- Control del motor mediante tensiones o corrientes de fase sinusoidal (FOC)
- Detección del ángulo del rotor con una precisión mínima de 1 ° a 5 °, lo que garantiza que el algoritmo siempre pueda entregar el par máximo
En los sistemas de control sin sensores, el ángulo magnético del motor se estima a partir de los voltajes y corrientes de fase del motor. Su posición se determina monitoreando ciertos parámetros eléctricos del motor y sin el uso de sensores adicionales. El tipo más común utilizado en drones es el motor de CC sin escobillas debido a su tamaño pequeño, costo relativamente bajo y alta durabilidad y robustez.
La mayoría de los drones tienen al menos cuatro motores, siendo la versión de cuatro motores la más utilizada. El ESC es responsable de controlar la velocidad de cada motor y, por lo tanto, la arquitectura de drones más común implica el uso exclusivo de un ESC para cada motor. Todos los ESC deben poder comunicarse entre sí, ya sea directa o indirectamente, a través del controlador de vuelo, para tener un fácil control del dron. La dirección de rotación de cada motor también es importante:en un cuadricóptero, un par de motores gira en una dirección, mientras que el otro gira en la dirección opuesta.
La técnica de control del motor más utilizada por los fabricantes de ESC es el control orientado al campo, una técnica que controla el par y la velocidad del motor. Cuando se implementa correctamente, FOC puede manejar incluso cambios rápidos de aceleración sin generar inestabilidad, lo que permite que el dron realice maniobras complejas mientras maximiza la eficiencia.
El diagrama de bloques de la Figura 1 a continuación muestra una arquitectura FOC que incluye los siguientes componentes:
- Controlador de corriente que consta de dos controladores proporcionales integrales
- Controlador de velocidad de bucle externo opcional y generador de corriente de referencia
- Transformaciones de Clarke, Park y Inverse Park para la conversión de marcos sincrónicos estacionarios a giratorios
- Un algoritmo de modulador de vector espacial para transformar los comandos vα y vβ en señales de modulación de ancho de pulso aplicadas a los devanados del estator
- Funciones auxiliares y de protección, incluida la lógica de inicio y apagado
- Observador opcional para estimar la posición angular del rotor si se desea un control sin sensores
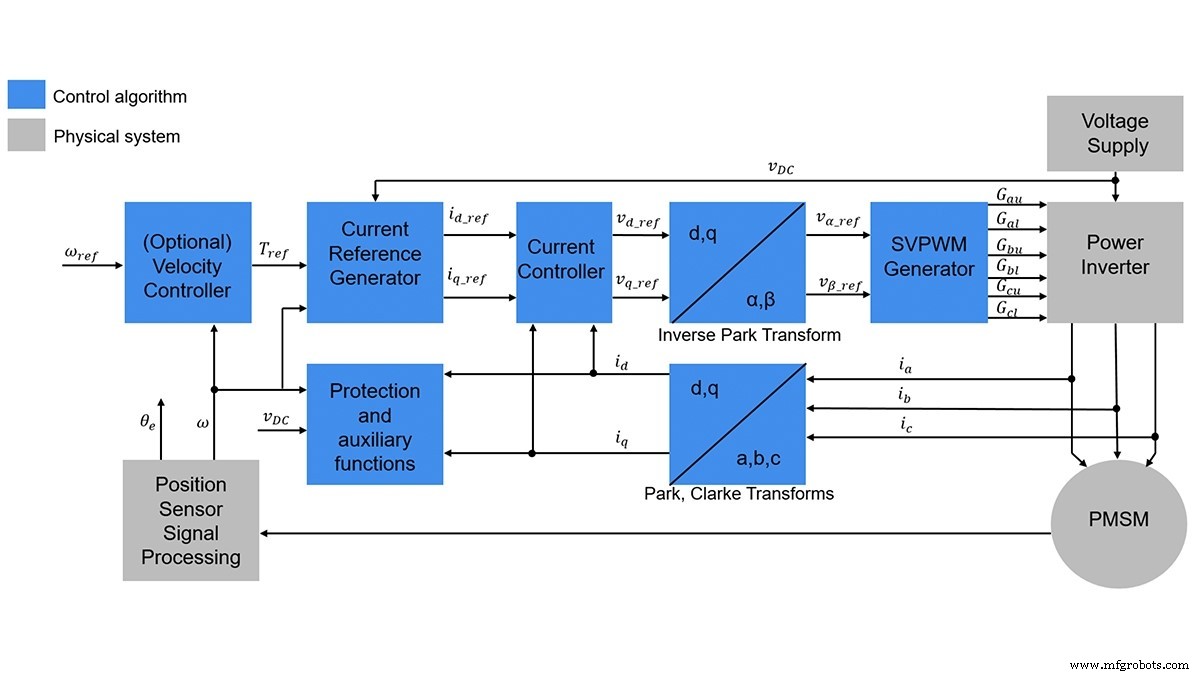
Figura 1. Diagrama de bloques del control orientado al campo (Fuente:Mathworks)
Los ingenieros de control de motores que diseñan un FOC realizan varias tareas, incluido el desarrollo de la arquitectura del controlador con dos controladores PI para el bucle de corriente, la optimización de todas las ganancias de los controladores PI para cumplir con los requisitos de rendimiento y el diseño de un modulador de vector espacial para controlar PWM.
Una vez que se elige el algoritmo de control (trapezoidal o FOC), el siguiente paso es elegir entre un sistema de control de bucle abierto o de bucle cerrado. En el control de bucle abierto, el motor síncrono (BLDC o BLAC) se acciona mediante una señal de control y se supone que sigue la acción de control ordenada. En el sistema de control de bucle cerrado, el circuito puede verificar si el motor se está moviendo según lo previsto. Si no es así, el sistema de control compensa automáticamente el movimiento excesivo o insuficiente reduciendo o aumentando la corriente.
Cuando se usa un sistema de control de bucle cerrado o bucle abierto (sin sensor), se deben medir las corrientes y los voltajes para usarlos como señales de retroalimentación. La Figura 2 muestra una configuración de medición típica, adecuada para sistemas de control trapezoidales y sinusoidales. Al utilizar el control trapezoidal con un algoritmo sin sensores, el algoritmo sin sensores utiliza los voltajes trifásicos para calcular el ángulo del rotor.
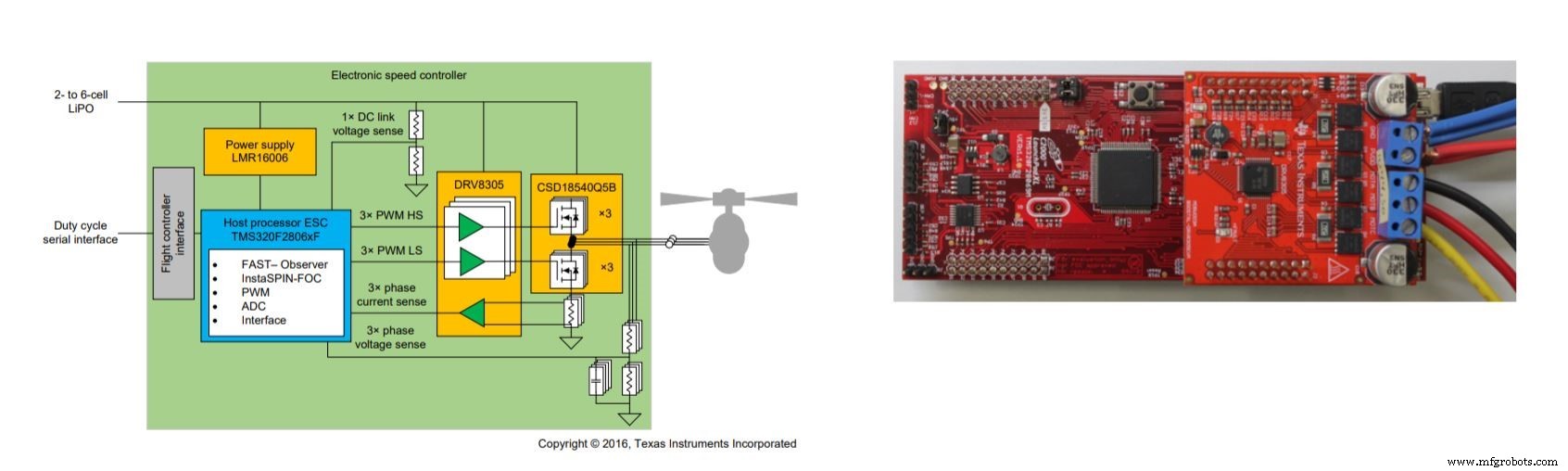
Figura 2. ESC con control de motor sin sensor. A la derecha está el diseño de referencia de FOC sin sensores de alta velocidad para drones ESC de Texas Instruments, y a la izquierda está su diagrama de bloques. (Fuente:Texas Instruments)
Dinámica de cuadricópteros
La simplicidad mecánica y la estabilidad aerodinámica de los drones están ligadas al uso coordinado de los motores y sus maniobras. En un quadcopter, el par de motores colocados en la diagonal de la estructura gira en la misma dirección pero en la dirección opuesta a los otros dos motores. Si los cuatro motores giran a la misma velocidad, el dron puede subir, bajar o permanecer en vuelo nivelado. Si el par diagonal gira más rápido que el otro, el dron gira alrededor de su centro de gravedad y permanece en el mismo plano horizontal (Figura 3).
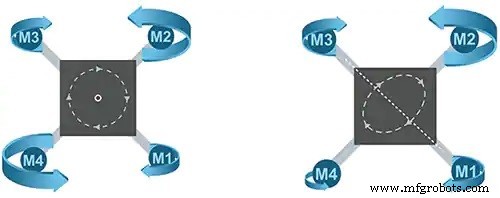
Figura 3. Los drones utilizan diferentes combinaciones de velocidades del rotor para realizar maniobras. (Fuente:STMicroelectronics)
Si cambia la velocidad del rotor de la cabeza (o la cola), el dron apuntará hacia arriba o hacia abajo como un avión de ala fija en picada. El ajuste de torque hacia la izquierda o hacia la derecha hará que el dron gire, haciendo que gire sobre su eje. Depende del sistema de control de vuelo del dron cambiar la velocidad del rotor apropiada para lograr la altitud de vuelo requerida para completar la maniobra deseada.
Para un ingeniero de control, la corrección de velocidad es un problema común de retroalimentación del lazo de control que se resuelve con un controlador proporcional, integral y derivativo (PID).
Diseño de un ESC
Diseñar un ESC para drones requiere componentes de alta calidad diseñados específicamente para controlar motores de altas RPM (12,000+ RPM). Texas Instruments ha desarrollado una familia de MCU, llamada InstaSPIN, que simplifica el diseño de aplicaciones de control de motores trifásicos. InstaSPIN-FOC, adecuado para sistemas sin sensores, cuenta con un codificador de software rápido con control de par y velocidad adecuado para cualquier motor trifásico. InstaSPIN-MOTION está dirigido a sistemas sin sensores y proporciona control de posición, velocidad y par para cualquier motor trifásico.
TI proporciona un diseño de referencia completo para estos osciloscopios y consta de las tecnologías de control de motor InstaSPIN-FOC e InstaSPIN-MOTION. La plataforma incluye un microcontrolador TI C2000 InstaSPIN de 32 bits. Permite a los desarrolladores identificar, ajustar y controlar automáticamente un motor trifásico, proporcionando rápidamente un sistema de control de motor estable y funcional.
STMicroelectronics ofrece un diseño de referencia ESC completo, implementando un algoritmo FOC sin sensores. El diseño de referencia STEVAL-ESC001V1 ESC es adecuado para diseños de drones comerciales de nivel de entrada y acciona cualquier motor sin escobillas trifásico (o PMSM) alimentado por paquetes de baterías LiPo 6S o cualquier fuente de alimentación de CC equivalente, hasta 30 A de corriente máxima. STEVAL-ESC001V1 permite a los diseñadores desarrollar rápidamente su aplicación gracias a un paquete completo de firmware preconfigurado (STSW-ESC001V1), que implementa un algoritmo controlado orientado al campo sin sensores con lectura de corriente de tres derivaciones, control de velocidad y frenado activo completo. El paquete de firmware / software STSW-ESC001V1 más la biblioteca MC del kit de desarrollo de software STM32 PMSM FOC permite optimizar el diseño del ESC actuando sobre los parámetros FOC integrados en un MCU STM32 y aprovecha el perfilador de motor ST para recuperar rápidamente los parámetros relevantes del motor. El algoritmo FOC sin sensor de ST se puede adaptar a cualquier aplicación de motor BLDC o PMSM trifásico, proporcionando tiempos de vuelo más largos y un rendimiento dinámico óptimo (Figuras 4 y 5).
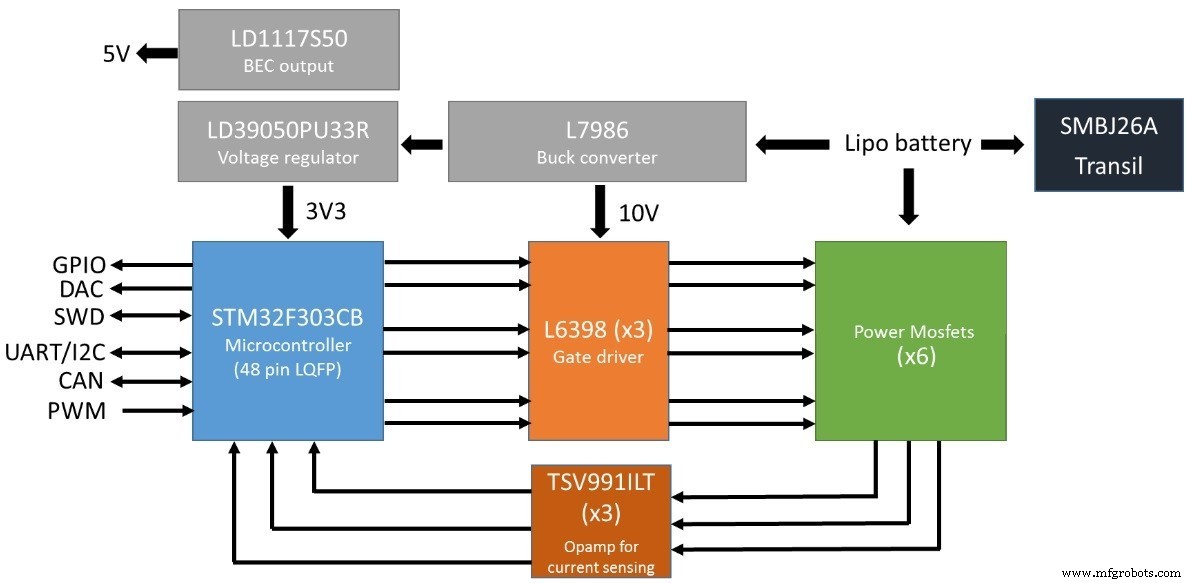
Figura 4. Diagrama de bloques de la solución STEVAL-ESC001V1 de ST (Fuente:STMicroelectronics)
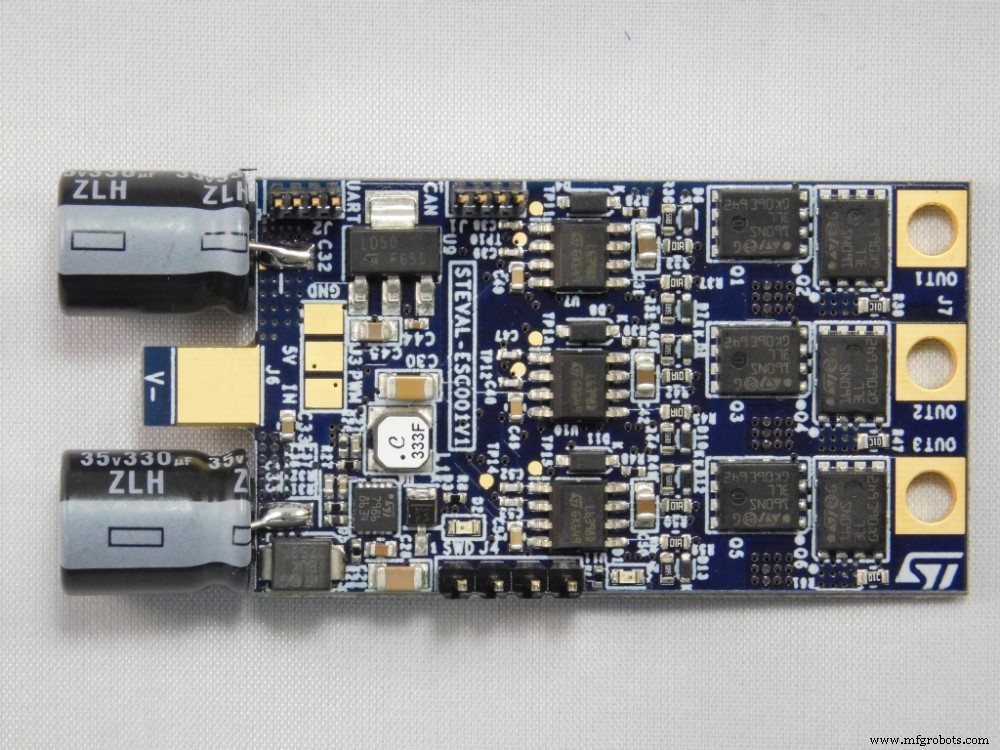
Figura 5. Placa STEVAL-ESC001V1 de ST (Fuente:STMicroelectronics)
La plataforma de desarrollo de drones HoverGames es una solución de hardware / software NXP modular y flexible que se puede utilizar para construir cualquier vehículo autónomo, desde drones y rovers hasta UAV. El kit de desarrollo se basa esencialmente en un microprocesador con Linux y Open CV y varios sensores que lo acompañan para guiar el vuelo.
El controlador de vuelo asegura que el dron permanezca estable. La placa es de código abierto con la posibilidad de insertar otros sensores externos para optimizar las operaciones según la funcionalidad.
Se deben implementar una batería LiPo y una radio de telemetría específica del país mediante una de las conexiones de IoT. Para una funcionalidad completa del kit, deberá seleccionar cuál de las dos radios de telemetría disponibles comprar. A través de la telemetría, puede tener una conexión en vivo con el vehículo durante el vuelo y puede ver el estado del dron durante el vuelo, cargar y controlar los puntos de referencia autónomos y realizar los cambios necesarios. Los datos de telemetría se envían a la estación de control, pero también se almacenan a bordo en la unidad de vuelo.
Los componentes del kit también incluyen módulo de alimentación CC a CC, módulo GPS NEO-M8N con soporte, interruptor de seguridad, zumbador, LED de estado RGB brillante, cable SEGGER J-Link EDU Mini / FTDI USB-TTL-3V3 / placa de ruptura de depuración con cable , Motores BLDC sin escobillas 2212 920 kV y controladores de motor ESC 40 A OPTO (Figura 6).
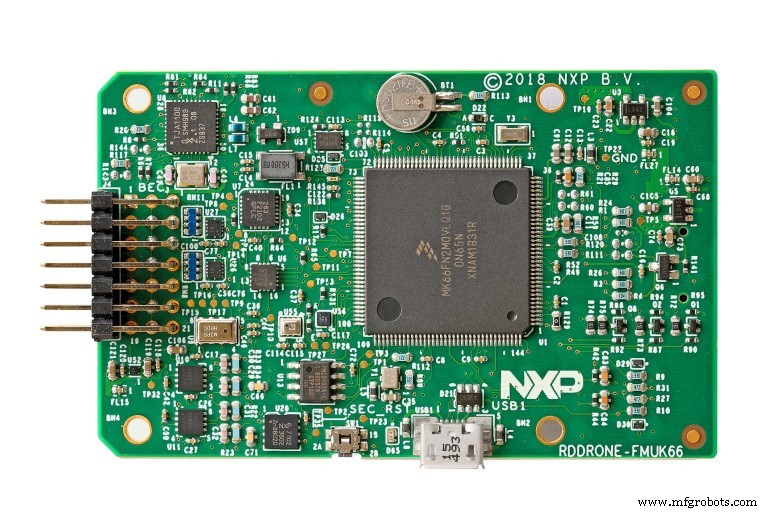
Figura 6. Unidad de vuelo RDDRONE-FMUK66 (Fuente:NXP)
>> Este artículo se publicó originalmente el nuestro sitio hermano, Power Electronics News.
Contenidos relacionados:
- Diseño de controladores de velocidad electrónicos para drones
- Los drones siguen avanzando en soluciones de carga inalámbrica
- El sensor LiDAR admite imágenes de alta resolución en UAV
- Los kits de desarrollo ofrecen plataformas para diseños de control de motores con alimentación digital
- Diseño de controles de motor para sistemas robóticos
- La fusión de sensores aporta múltiples beneficios
Para obtener más información sobre Embedded, suscríbase al boletín informativo semanal por correo electrónico de Embedded.
Incrustado
- Circuitos permisivos y de enclavamiento
- Circuitos de control del motor
- Renesas amplía las opciones de microcontroladores para el servocontrol en robots industriales
- Diseño de controles de motor para sistemas robóticos
- El controlador del motor integra el núcleo Arm Cortex-M0
- El control de calidad es el primer paso para la confiabilidad del motor
- Control de tensión en la manipulación de bobinas:componentes clave
- Compresores VSD integrados:8 ventajas clave
- Qué determina la velocidad de un motor hidráulico
- ¿Cómo se controla la velocidad de un motor hidráulico?
- ¿Qué determina la velocidad de un motor hidráulico?