


La tecnología de tiempo de vuelo promete una precisión mejorada
Analog Devices (ADI) y Microsoft se han asociado para producir soluciones de imágenes 3D de tiempo de vuelo (ToF) con el objetivo de proporcionar una mayor precisión independientemente de las condiciones de la escena. ADI aprovechará la tecnología Azure Kinect 3D ToF de Microsoft y agregará su experiencia técnica en sistemas y circuitos integrados para crear soluciones que serían más fáciles de adoptar. El objetivo es llegar a una amplia audiencia en sectores como Industria 4.0, automoción, videojuegos, realidad aumentada y fotografía y videografía computacional.
Los analistas de mercado de la industria estiman un fuerte crecimiento para los sistemas de imágenes 3D utilizados en entornos desafiantes, y donde se requieren aplicaciones de vanguardia como robots de colaboración humana, mapeo de salas y sistemas de administración de inventario para dar vida a la Industria 4.0. Las aplicaciones ToF también son necesarias para crear entornos de conducción automotriz más seguros con capacidades de detección de ocupación y monitoreo del conductor.
En una entrevista con EE Times, Tony Zarola, director senior de imágenes e interpretación mejoradas y Carlos Calvo, gerente de marketing estratégico de Analog Devices, han destacado los fundamentos de esta colaboración . Zarola dijo: “ Microsoft se ha convertido en el punto de referencia para el rendimiento de 3D ToF entre los fabricantes de sensores de imagen y está proporcionando a ADI la tecnología de píxeles central que es la base de los sensores y las soluciones que ADI está construyendo. Durante décadas, han desarrollado la experiencia necesaria para la mejor captura de datos y los algoritmos revolucionarios que ejecutan en Intelligent Edge o en Intelligent Cloud. Esperamos poder combinar lo mejor de las capacidades de Microsoft y ADI en silicio, sistemas, software y óptica ".
Diseño 3D ToF
El reconocimiento de gestos es la capacidad de un dispositivo para identificar una serie de movimientos del cuerpo humano. La tecnología electrónica se basa en la ayuda de una cámara y un IC para la identificación y escaneo de la escena en un perfil 2D o 3D. La técnica del tiempo de vuelo consiste en enviar un rayo láser al objetivo y analizar el reflejo de la señal.
El tiempo de vuelo 3D, o 3D ToF, es un tipo de LIDAR (detección de luz y rango) sin un escáner que usa pulsos ópticos de alta potencia en nanosegundos para capturar información de profundidad (generalmente en distancias cortas) de una escena. Las diversas soluciones de CI, con la ayuda de algoritmos de software de reconocimiento de gestos, crean un mapa de profundidad de las imágenes recibidas, respondiendo en tiempo real a los movimientos corporales. La principal ventaja de la tecnología de reconocimiento de gestos es que no es necesario ningún contacto físico entre el individuo y el sistema de control.
Una cámara ToF mide la distancia iluminando un objeto a través de luz láser modulada y un sensor láser sensible a la longitud de onda para capturar la luz reflejada. El sensor mide el tiempo de retraso entre el momento en que se emite la luz y el momento en que la cámara recibe la luz reflejada. Existen varios métodos para medir el retardo de tiempo, dos de los cuales se han vuelto comunes:el método de onda continua (CW) y el método de pulso. La gran mayoría de los sensores ToF son CW y utilizan sensores CMOS.
Hay muchos factores de confusión que dificultan la medición del tiempo de vuelo (ToF):interferencia de la luz ambiental, efectos de trayectos múltiples causados por la luz que rebota en los objetos en la escena y corrompen la distancia real, efectos de la temperatura, ambigüedad del rango. “Los desafíos escalan desde el desarrollo del silicio hasta la creación de un sistema completo que funcione en alineación con la suma teórica de las partes”, dijo Calvo. “Es imposible mirar cada componente de forma aislada. Por ejemplo, una cámara ToF con el mejor sensor pero equipada con una lente no optimizada tendrá un rendimiento general deficiente del sistema ".
“En la superficie, las cámaras ToF tienen similitudes con las cámaras RGB. Una distinción clave es que, según la aplicación, la calidad de imagen de la cámara RGB se juzga con un grado de subjetividad; otras aplicaciones solo se habilitan mediante posprocesamiento avanzado. Una cámara ToF mide una cantidad física objetiva (distancia) sobre la cual un usuario, dependiendo de la aplicación, puede confiar significativamente en la precisión de la imagen. Algunas imperfecciones ópticas en las cámaras RGB, como el destello de la lente, pueden producir artefactos que a veces se consideran artísticos (por ejemplo, destello de luz solar). En un sistema ToF, el destello de la lente, si no se minimiza drásticamente, puede paralizar el rendimiento de todo el sistema en presencia de fuertes reflejos de los objetos, agregó Calvo ”
El sensor CMOS utilizado para el tiempo de vuelo consta de un emisor y un receptor; permite cálculos para la distancia de los objetos a un nivel de un solo píxel con un rendimiento cercano a 160 fps.
“A nivel de silicio, se deben considerar los elementos clave de la cadena de señales:el controlador láser, el sensor de imagen ToF con lectura integrada y finalmente el motor de cálculo de profundidad. El desafío comienza con el diseño de un píxel con alta capacidad de respuesta y alto contraste de modulación en el propio sensor de imagen y termina con la formación de una nube de puntos 3D que puede ser interpretada por la siguiente capa de aplicación.
“Aparte de los componentes, los desafíos clave surgen del diseño y la producción de una cámara de profundidad, ya que el diseño opto-mecánico, la calibración, el diseño eléctrico y la implementación de software requieren mucho tiempo y son desafiantes. Analog Devices (ADI) asume estos desafíos para que nuestros clientes faciliten su proceso de diseño ”, dijo Calvo.
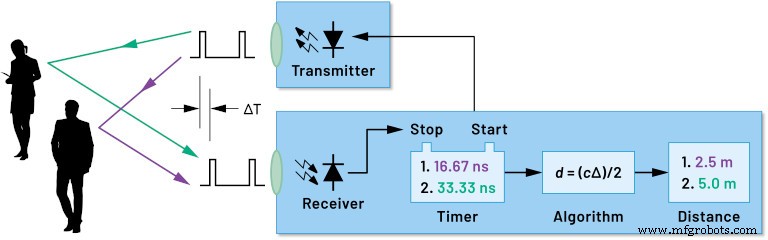
Figura 1. Diagrama de bloques de ToF. (fuente:ADI)
Los píxeles recogen luz de distintas partes de la escena y su recombinación constituirá la imagen reconstruida. Todos los píxeles del sensor están controlados por una correlación entre los bloques de demodulación y modulación. Cada píxel se puede aproximar mediante el modelo que se muestra en la Figura 2.
La corriente se dirige al Nodo-A (Da) o Nodo-B (Db) durante el tiempo de integración activando las señales de control relevantes. La lectura se realiza con la demodulación detenida, de modo que el sistema puede leer toda la secuencia de bits. ClkA y ClkB se modulan 180 grados fuera de fase durante el tiempo tInt1 a la frecuencia de modulación seleccionada. La fase de la luz recibida en relación con el reloj ClkA y CLkB determina las señales DA y DB. Al final de la integración, ClkA y ClkB se apagan y la fase de lectura se lleva a cabo muestreando la señal integrada (BitlineAInt1-BitlineBInt1).
La conversión de fotones en corriente eléctrica se rige por un proceso cuántico con distribución de Poisson. El parámetro que nos da una idea de la bondad del sistema es la eficiencia cuántica, es decir, la relación entre el número de electrones producidos y el de fotones que activan los píxeles correspondientes. El número de electrones depende tanto de la luz modulada real como de la luz ambiental que corresponde al efecto de ruido. Un parámetro a elegir al diseñar un sistema de tiempo de vuelo es FoV (campo de visión). El campo de visión debe elegirse adecuadamente de acuerdo con los requisitos de cobertura de la escena.
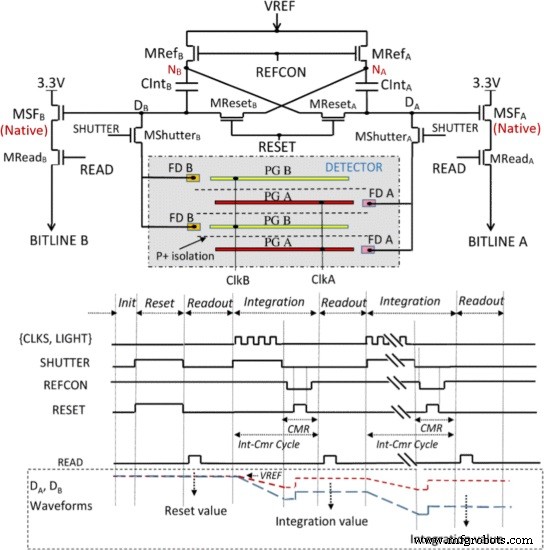
Figura 2. Circuito eléctrico y temporización de un píxel. (Fuente:https://ieeexplore.ieee.org/document/6964815)
Para lograr una alta eficiencia a altas frecuencias, el chip se puede fabricar utilizando un proceso CMOS de baja potencia de señal mixta de 0,13 μm con modificaciones menores para admitir una operación de tiempo de vuelo eficiente.
ADI y Microsoft
La colaboración entre Microsoft y ADI tiene como objetivo mejorar la tecnología ToF:ADI está diseñando una nueva serie de sensores de imagen ToF 3D que proporcionarán una precisión de menos de un milímetro y serán compatibles con el ecosistema gigante de Redmond, basado en la profundidad de Microsoft, Intelligent Cloud. y plataformas Intelligent Edge.
“Creemos firmemente que esta colaboración afectará a todas las industrias principales:consumo, industrial, sanitario y automotriz. Hasta ahora, la tecnología desarrollada por Microsoft no estaba ampliamente disponible para aplicaciones comerciales escaladas. Creemos que las soluciones ADI, impulsadas por la tecnología de generación de imágenes de Microsoft, cambiarán las reglas del juego en todos los ámbitos ", dijo Zarola.
Existen aplicaciones obvias de los sistemas de seguridad para un mejor reconocimiento facial junto con medidas de seguridad avanzadas para una automatización industrial más eficiente. La Industria 4.0 se transformará con robots colaborativos que trabajarán de forma segura junto a los humanos sin estar cercados en un área "no humana" y la precisión de ToF permitirá una mayor optimización en la logística para el dimensionamiento de cajas y paletas.
Zarola agregó:“La detección de ocupación más sofisticada conducirá a mejoras en la eficiencia energética, los sistemas de seguridad y las interacciones entre humanos y máquinas. Desde el hogar hasta el automóvil, nuestra colaboración ToF con Microsoft brindará a las nuevas experiencias de juego la capacidad de colocar e interactuar con objetos virtuales en el mundo real y cambiar la forma en que interactuamos con nuestros automóviles y aumentar la seguridad al monitorear tanto al conductor como a los pasajeros. Los casos de uso potenciales de la tecnología ToF son amplios y están en evolución, por lo que se espera que las principales aplicaciones de hoy sean reemplazadas por nuevas ideas mañana ”.
Zarola y Calvo han declarado que sus clientes quieren una resolución de profundidad milimétrica y una resolución espacial fina en un amplio rango de temperaturas. Lograr este tipo de rendimiento requiere un nivel extremo de sincronización de tiempo logrado tanto a nivel de hardware como de software. “Una desalineación de tiempo de 10ps entre las señales que controlan el láser y los píxeles en el sensor da como resultado un error de 1,5 mm en la estimación de la distancia final. Si eso no fuera lo suficientemente difícil, agregue a eso la necesidad de mantener un sistema de tiempo de vuelo preciso en un amplio rango de temperaturas que requiere un procesamiento avanzado y algoritmos de calibración que deben diseñarse en conjunto ”, dijo Calvo.
Una crítica específica de los sistemas ToF es la frecuencia de modulación a la que pueden operar y donde ADI está más concentrado. La mayoría de las fuentes de errores de estimación de profundidad tienden a "dividirse" por la frecuencia de modulación. “Nuestro objetivo es aumentar la frecuencia de modulación promedio de un sistema ToF que permitirá realizar mediciones con un ruido de menor profundidad y reducir los efectos adversos del ruido de disparo de luz ambiental o multitrayecto”, dijo Zarola.
Zarola agregó, “ADI también está buscando resolver desafíos clave que hacen que el diseño y la producción de cámaras de profundidad requieran mucho tiempo y sean difíciles. Estamos asumiendo la alineación mecánica, el diseño óptico, la calibración, el diseño eléctrico y la implementación de software junto con los obstáculos tradicionales en la captura de imágenes ”.
La combinación de la tecnología 3D Time-of-Flight (ToF) de Microsoft utilizada en los dispositivos de realidad mixta HoloLens y el kit de desarrollo Azure Kinect, con las soluciones personalizadas de ADI, permitirá que la nueva generación de aplicaciones de alto rendimiento sea implementada y escalable, todo mientras optimizar el tiempo de comercialización.
>> Este artículo se publicó originalmente el nuestro sitio hermano, EE Times.
Incrustado
- ams para facilitar la implementación de la tecnología de detección óptica 3D
- La plataforma GNSS agudiza la precisión posicional
- Las tecnologías mejoradas acelerarán la aceptación de los asistentes de voz
- Los sensores fotoeléctricos extienden la distancia de detección del tiempo de vuelo
- Los sensores de imagen para automóviles ofrecen un rango dinámico mejorado
- Un pequeño sensor de imagen 3D utiliza tecnología de tiempo de vuelo
- El sensor de presión barométrica ofrece una mayor precisión
- DUAGON-MEN-GROUP integra soluciones de tecnología OEM Australia
- Cómo la tecnología promete transformar las industrias agrícolas y alimentarias
- Tecnología de movimiento lineal
- placa de circuito impreso 101