


Controlador de nivel de agua completamente automático con SRF04
Controlador de nivel de agua completamente automático con SRF04, L293D y PIC16F84A
Introducción al controlador automático de nivel de agua
Monitorización y control del nivel de agua en depósitos de agua es una de las obras más importantes en casi muchas áreas residenciales y comerciales. En la mayoría de los casos, especialmente en edificios residenciales, debido a la falta de disponibilidad de cualquier medio automático, se vuelve tedioso e inconveniente monitorear frecuentemente el nivel del agua en los tanques. De hecho, para lugares con escasez de agua, el desbordamiento de agua sería algo muy costoso de pagar.
La única solución al problema anterior es tener una forma automática de monitorear y controlar el nivel del agua. Si bien existen muchas técnicas, como usar sensores de distancia, usar sondas de corriente, usar un guardabosques ultrasónico, etc., aquí nos centraremos en usar un guardabosques ultrasónico.

- Proyecto relacionado: Circuito de alarma de lluvia:proyecto de detector de nieve, agua y lluvia
Descripción general del sistema del controlador de nivel de agua
El sistema consta de un sensor de rango ultrasónico colocado en la parte superior del tanque de tal manera que, una vez activado, envía una señal ultrasónica. El agua presente en el tanque se reflejaría en la señal. El sensor recibiría esta señal y el tiempo transcurrido entre estas dos señales daría una estimación de la distancia recorrida por las señales, por lo tanto, el nivel del agua desde arriba.
Aquí se usa un microcontrolador para enviar la señal de activación al guardabosques ultrasónico. Una vez que se recibe un eco, se calcula el tiempo de retraso entre los dos pulsos y esto es directamente proporcional al nivel del agua. El tiempo de retraso se calcula con la ayuda de Timer, cuyo número de pulsos de conteo indica la distancia recorrida por la señal o el nivel del agua.
Dado que aquí el guardabosques se coloca encima del tanque, el control del flujo de agua se realiza teniendo en cuenta el nivel de agua desde la parte superior del tanque. Por ejemplo, si el rango medido se encuentra entre 0 y 1 cm, el tanque se está desbordando y el microcontrolador envía una señal de control para girar el motor en dirección inversa, para eliminar el exceso de agua. ‘
Si el rango está entre 2 y 5 cm, el tanque está lleno y el microcontrolador envía una señal de control para apagar el motor. Si el rango es superior a 5 cm, el tanque está casi vacío y el microcontrolador envía una señal de control para girar el motor hacia adelante.
Diagrama de circuito del controlador automático de nivel de agua
Haga clic en la imagen para ampliar
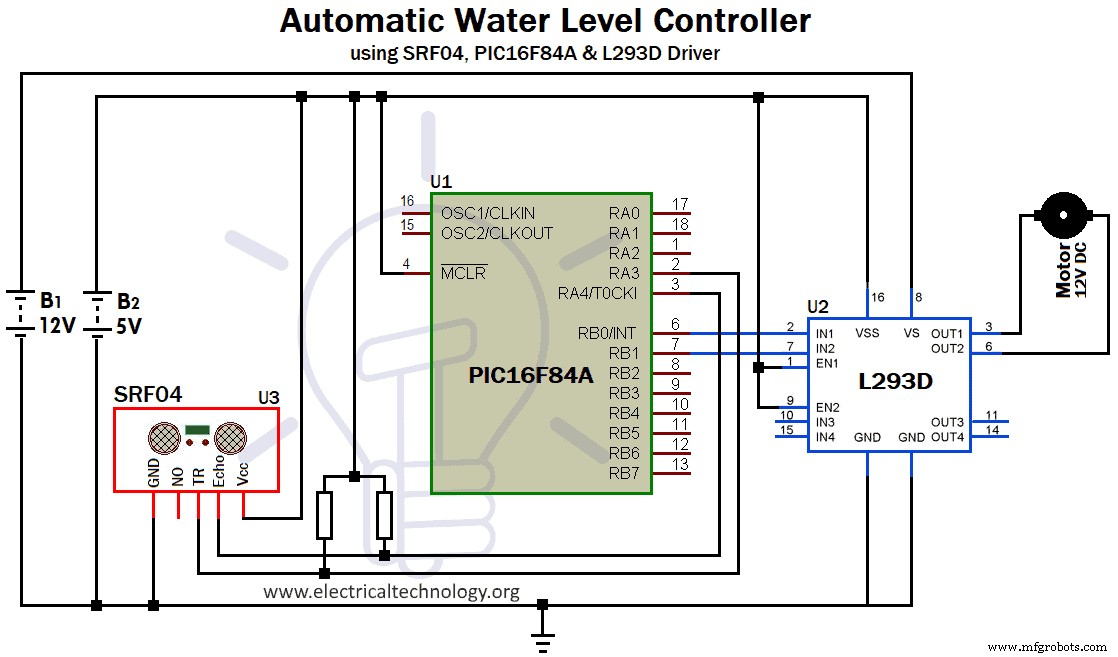
Figura 1:Controlador de nivel de agua
Descripción de las piezas
Los siguientes componentes se usarían para diseñar el circuito.
- Telémetro ultrasónico SRF04
- Microcontrolador PIC PIC16F84A
- Conductor de motor L293D
- Motor CC
- Dos resistencias de 1K
Vamos a tener una breve idea sobre cada componente
Telémetro ultrasónico SRF04 :
El SRF04 es un guardabosques ultrasónico de alta calidad que se utiliza en muchas aplicaciones robóticas para detectar fácilmente obstáculos. Requiere una señal de 10 microsegundos para activarse. 
Figura 2:Telémetro ultrasónico SRF04
Una vez activado, envía 8 pulsos de ultrasonido, a una frecuencia de 40 KHz y simultáneamente envía una línea de eco elevada a ALTO. Una vez que recibe la señal reflejada o el eco, baja la línea de eco a BAJA.
Por lo tanto, el ancho del pulso de eco denota la distancia recorrida por la señal o, en otras palabras, la distancia desde el guardabosques hasta el objeto. La línea de eco es, por lo tanto, un pulso cuyo ancho es proporcional a la distancia al objeto. Para 1 cm, el ancho del pulso de eco sería de 58 microsegundos. 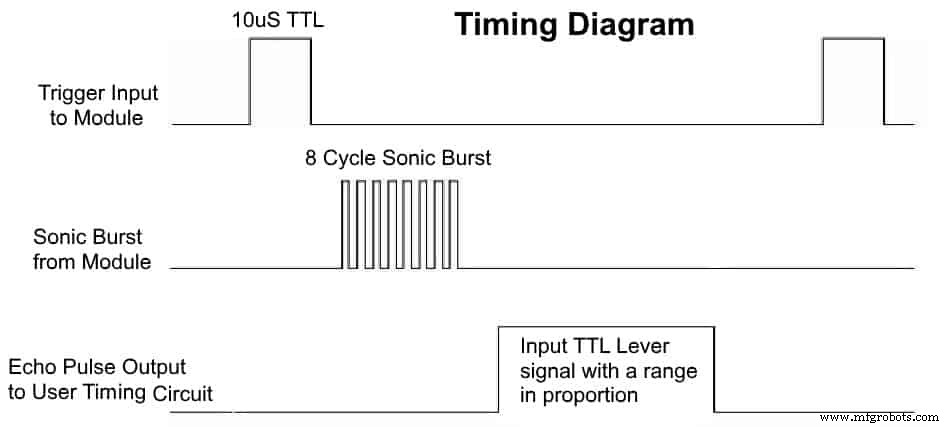
Figura 3:Diagrama de tiempo SRF04
Microcontrolador PIC PIC16F84A:
Figura 4:Microcontrolador PIC PIC16F84A
Es un microcontrolador Flash de 18 pines y 8 bits compatible con CMOS con un solo temporizador de 8 bits (con preescalador programable de 8 bits). La operación del temporizador se controla mediante los siguientes registros:OPTION_REG, TMR0 e INTCON. El OPTION_REG es un registro de 8 bits cuyo 5 th bit (T0CS) selecciona la operación de temporizador o contador requerida.
Configurar el bit selecciona la operación del contador mientras que borrarlo selecciona la operación del temporizador. TMR0 es el registro del temporizador, mientras que INTCON es el registro de interrupción cuyo 5
th
bit (T0IE) denota el indicador del temporizador, es decir, se establece cuando el temporizador se desborda. 
Conductor de motor L293D:
Figura 5:controlador de motor IC L293D
Es un circuito integrado de controlador de motor de CC basado en puente H de 16 pines. Tiene capacidad para accionar dos motores y en ambos sentidos. Consta de dos pines de habilitación (Pin1 y 9) que, cuando se configuran en ALTO, habilitan la operación del IC. Básicamente actúa como una interfaz entre el microcontrolador y el motor de CC. Consta de cuatro pines de entrada, dos para cada circuito de puente H. A continuación se muestra una tabla que indica el control del motor. 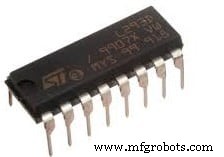
| IN2 (Pin 7) | EN1 (Pin 1) | Funcionamiento del motor | |
| ALTO | ALTO | ALTO | DESACTIVADO |
| BAJO | BAJO | ALTO | DESACTIVADO |
| ALTO | BAJO | ALTO | ENCENDIDO (sentido horario) |
| BAJO | ALTO | ALTO | ENCENDIDO (sentido antihorario) |
| X | X | BAJO | DESACTIVADO |
Nota:Dado que SRF04 es un dispositivo compatible con TTL y PIC16F84A es compatible con CMOS, estamos usando una resistencia pull up de valor 1K para compensar el cambio de nivel de voltaje.
Funcionamiento y funcionamiento del controlador automático de nivel de agua
El programa está escrito de tal manera que se envía un pulso de 10 microsegundos desde el microcontrolador para activar el guardabosques ultrasónico. Esto se escribe usando una función de retardo. El registro del temporizador, TMR0, se carga con el valor decimal 200, de modo que realiza 55 conteos.
La salida de SRF04, la señal de eco se recibe en el pin RA4 (el pin del reloj del temporizador, lo que proporciona un pulso de reloj externo al temporizador). Una vez que la señal de eco hace una transición de ALTA a BAJA, se activa el temporizador. A medida que el temporizador cuenta, se monitorea el bit indicador de interrupción, T0IE. Una vez configurado, el temporizador se desactiva.
El procedimiento se repite para otro pulso de eco y así sucesivamente. Se calcula el número de veces que funciona el temporizador y esto denota el número de pulsos de eco. Dado que cada pulso de eco es de 58 microsegundos, denota 1 cm. Por lo tanto, 5 pulsos de eco denotarían 5 cm. El valor de este recuento, almacenado en un número entero, se utiliza para controlar el motor de CC.
Si el valor está entre 2 y 5, el microcontrolador envía señales ALTAS a los pines RB0 y RB1 (conectados a IN1 e IN2 de L293D respectivamente), para apagar el motor. Si el valor está entre 5 y 20, el microcontrolador envía una señal ALTA a IN1 y una señal BAJA a IN2, para encender el motor y girarlo en el sentido de las agujas del reloj. Si el valor está entre 0 y 1, el microcontrolador envía una señal BAJA a IN1 y una señal ALTA a IN2, para encender el motor y girarlo en sentido contrario a las agujas del reloj.
Ventajas del controlador automático de nivel de agua con SRF04
- Sería un sistema simple y conveniente.
- Sería un sistema de bajo costo debido al uso de componentes de bajo costo.
- Usar la técnica automática eliminaría los obstáculos que se enfrentan en el control del nivel del agua usando medios manuales.
- Dado que no se utilizan piezas mecánicas, esto eliminaría el riesgo de corrosión o desgaste mecánico.
Desventajas del controlador automático de nivel de agua
- El telémetro ultrasónico, SRF04, estaría sujeto a amortiguamiento debido al uso de muchos componentes electrónicos y, por lo tanto, debería estar debidamente aislado.
- Este sistema está diseñado de tal manera que tanto el sensor como el actuador deben colocarse cerca uno del otro. En palabras sencillas, este sistema de control es para lugares donde el tanque de agua está cerca de la bomba de agua. Por lo tanto, para muchos edificios donde se utilizan bombas sumergibles y los tanques de agua están en los techos, este sistema de controlador automático de nivel de agua No puede ser usado. Sin embargo, esto se puede modificar utilizando un circuito de comunicación.
Tecnología Industrial
- Controlador de potencia PWM
- Uso de tecnologías sin agua en el proceso de teñido
- 4 ventajas de usar una solución inteligente de detección de fugas en edificios
- 5 ventajas de usar el sistema de detección de fugas de agua impulsado por IoT de Biz4intellias en industrias
- Supervisión y control inteligente del nivel del agua para una gestión eficaz del agua
- 7 beneficios de usar la solución de monitoreo de nivel inteligente de Biz4Intellia
- Uso de un sistema de monitoreo de nivel de río alimentado por IoT para una gestión eficiente del agua
- ¿El poliuretano es impermeable?
- Lista de materiales manual versus automática
- 7 beneficios de una cocina totalmente/semiautomática para cocinas en la nube
- ¿Qué es una bomba de agua automática?