


Tecnología de cámara de conteo de fotones de megapíxeles
Imagine una cámara diseñada para capturar imágenes con una resolución de un solo fotón a 24.000 fotogramas por segundo. Gracias a un obturador electrónico que puede permanecer abierto durante solo 3,8 ns y que se puede sincronizar con pulsos láser rápidos con una duración de solo unos pocos picosegundos, literalmente se puede ver la luz propagándose por el espacio. Con esta capacidad, se abren nuevas aplicaciones, como visión cuántica, imágenes fantasma, imágenes de ruido de subdisparos, LiDAR cuántico y destilación cuántica, por nombrar algunas.
Común a estas aplicaciones es la necesidad de detección de un solo fotón y alta resolución de tiempo con bajo ruido y alta sensibilidad. Esta nueva cámara es capaz de todo eso pero, además, lo hace en un millón de píxeles simultáneamente, lo que permite una considerable aceleración en la captura y, posiblemente, en la reconstrucción. En el núcleo de estos píxeles hay un diodo de avalancha de fotón único (SPAD) que realiza la detección de fotones, generando un pulso digital. Este pulso se puede contar o marcar con fecha y hora, lo que le da al conteo de fotones y el carácter de resolución temporal de la cámara.
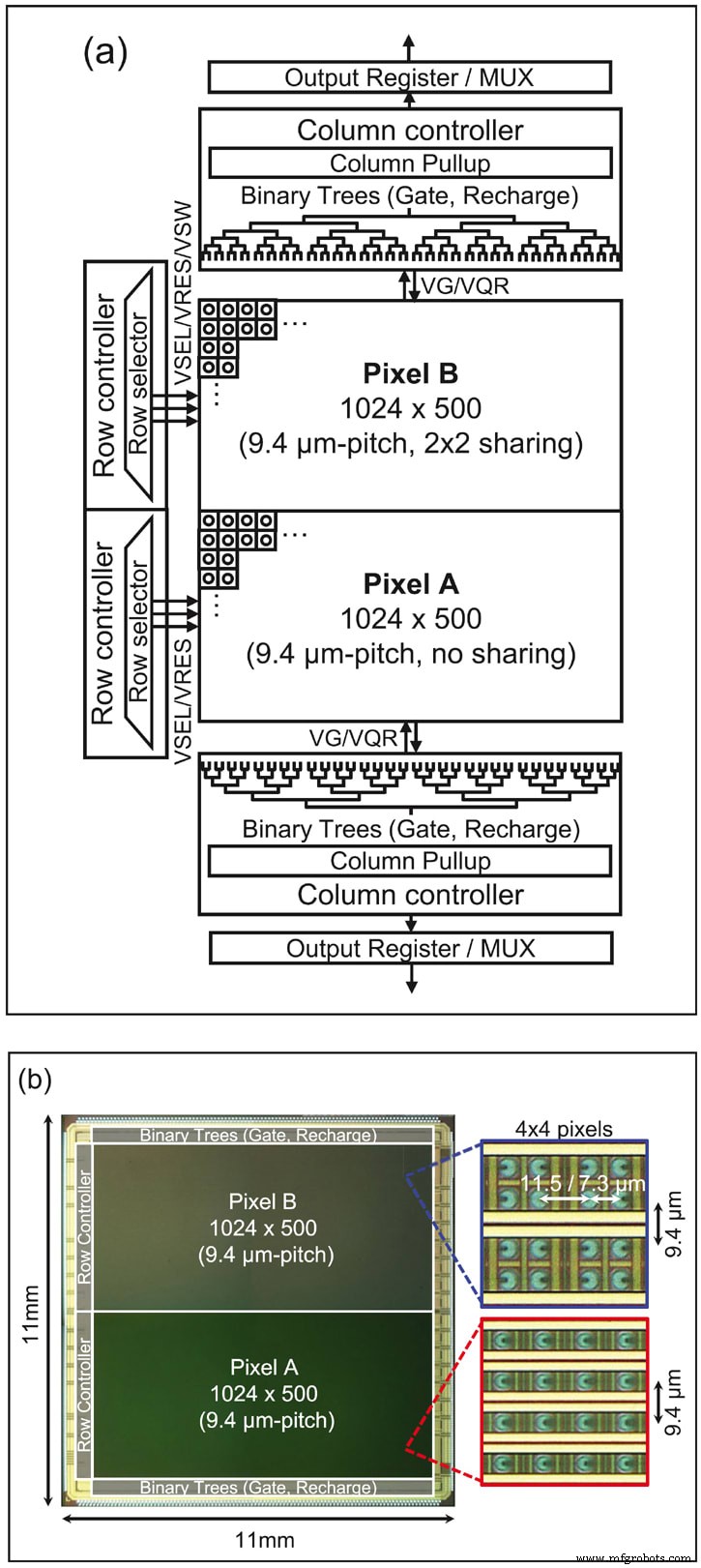
En un artículo publicado en la revista revisada por pares Optica, presentamos la primera cámara de 1 megapíxel basada en los píxeles SPAD. Los píxeles tienen un pitch de 9,4 μm, con una arquitectura de 7T (7 transistores por píxel) o 5,75T. La micrografía del chip de la cámara se muestra en la Figura 1(b). El diagrama de bloques de la cámara se muestra en la Figura 1(a); comprende un árbol binario dual para controlar el obturador con una precisión de unos 100ps y una posición sintonizable en pasos de 36ps. Esto permite reconstruir imágenes en 3D midiendo el tiempo de vuelo de un pulso de luz cuando sale del láser y es reflejado por un objeto. También permite capturar la luz en vuelo, exponiendo así interesantes efectos relativistas en el laboratorio.
El chip se probó como un sensor de imagen de intensidad con un gráfico estándar (Figura 2(a)) de hasta 14 bits a nivel de píxel. Las Figuras 3 (a) y (b) muestran imágenes 2D y 3D codificadas por colores obtenidas al iluminar una escena con un láser de 637 nm pulsado a 40 MHz y capturadas en el sensor de imagen de resolución media. La ventana de la puerta con su longitud de 3,8 ns se desplaza de 0,6 ns a 13,2 ns en pasos de 36 ps para adquirir perfiles completos de intensidad de fotones en función de la posición de la puerta.

La distancia LSB en esta medida corresponde a 5,4 mm. La información de profundidad se reconstruye detectando la posición del borde ascendente del perfil de intensidad suavizado para cada píxel, correspondiente al tiempo de llegada del pulso láser reflejado. El sesgo de temporización de la puerta sobre la matriz se compensa restando la distribución de sesgo de temporización medida independientemente de la distribución de tiempo de llegada medida. En la Figura 3(b), el color rojo indica una mayor proximidad a la cámara SPAD, mientras que el color azul corresponde a una mayor distancia. El rango de profundidad máximo para esta medición se estableció en 2 m, pero se puede extender a decenas de metros al reducir la frecuencia de repetición del láser y aumentar el paso de puerta.
El paso de exploración de puerta fina y la exposición prolongada se utilizan para lograr una alta precisión de profundidad, y el tiempo de adquisición de datos resultante para esta medición fue de unas pocas decenas de segundos. Esto es considerablemente más largo que el de otros métodos de alcance, como el tiempo de vuelo indirecto, pero se puede reducir fácilmente aumentando el paso de exploración de la puerta, reduciendo el rango de exploración y aumentando la potencia del láser para reducir el tiempo de exposición. Además, se esperan mejoras adicionales mediante la implementación de una microlente en el chip para aumentar la sensibilidad.
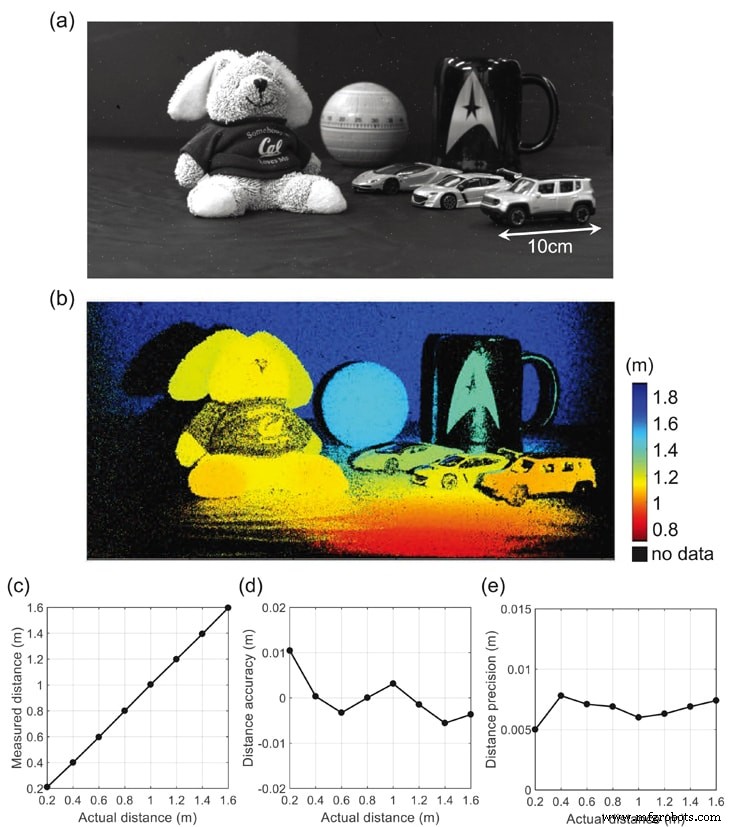
La figura 3(c) muestra la distancia medida en función de la distancia real del objeto. En la Figura 3(c), (d) y (e), se usa un objeto plano cubierto con papel blanco (reflectancia alrededor del 60%) para evaluar la distancia medida, la exactitud y la precisión. En la Figura 3(c), la distancia medida se extrae tomando el promedio de la distancia de un solo píxel sobre 20×20 píxeles en el centro de la matriz. Se observa una muy buena concordancia con la distancia real dentro del rango medido de 0,2 a 1,6 m. En la Figura 3(d), la precisión de la distancia se calcula como la distancia medida promedio restada por la distancia real. Para el rango de distancia medido, la precisión siempre es mejor que 1 cm. En la Figura 3(e), la precisión de la distancia se explota como una desviación estándar de la distancia de un solo píxel sobre 20×20 píxeles en el centro de la matriz. La precisión es mejor que 7,8 mm (rms) para todos los puntos medidos hasta 1,6 m.
La detección de múltiples objetos se ha demostrado experimentalmente codificando la iluminación temporal o los patrones de exposición, lo que implica un gran costo computacional para recuperar imágenes 3D. Un sensor de tiempo de vuelo controlado por tiempo proporciona una solución alternativa y escalable por medio de circuitos de píxeles compactos y cálculos menos complicados.
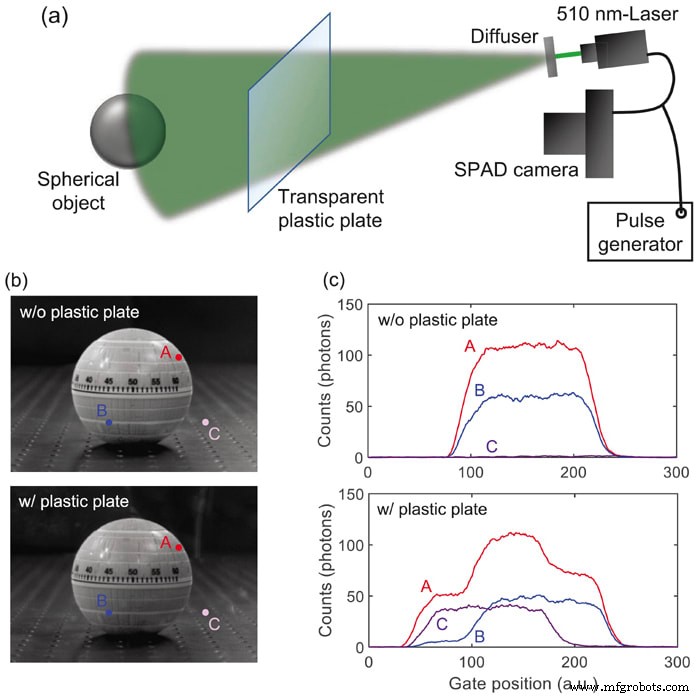
La figura 4(a) muestra la configuración experimental:un rayo láser de 510 nm pulsado a 40 MHz se propaga mediante un difusor y se usa para iluminar un objetivo esférico. La cámara SPAD se sincroniza con la señal de activación del láser y se inserta una placa de plástico transparente entre la cámara y el objeto. Las distancias de la cámara a la placa de plástico y al objeto son 0,45 m y 0,75 m, respectivamente. La Figura 4(b) muestra imágenes de intensidad 2D bajo iluminación interior con y sin la placa de plástico insertada. Dado que la placa es casi transparente, no se observa una diferencia significativa en las imágenes 2D para esos dos casos.
Los perfiles de sincronización de tiempo medidos para tres puntos representativos (A, B y C) se trazan en la Figura 4 (c). Sin la placa, los perfiles de intervalos de tiempo para los puntos A y B muestran solo una única forma de onda de función rectangular suavizada con su borde ascendente alrededor de la posición de intervalo 100 (un paso de la posición correspondiente a 36 ps). Para el punto C, el recuento de fotones se mantiene cercano a cero en el rango de posición de la puerta medida, lo que indica que no se detecta ningún objeto reflectante en este píxel.
Con la placa de plástico, por el contrario, el perfil en el punto A muestra bordes ascendentes de dos pasos alrededor de las posiciones de puerta 40 y 100. Dado que el perfil medido de los recuentos de fotones es una convolución de una sola función rectangular suavizada y la distribución de intensidad de fotones reflejados, el perfil de dos pasos es una prueba convincente de la doble reflexión de la placa de plástico y el objeto esférico. Se observa un comportamiento similar en el punto B, donde la pendiente del primer borde ascendente alrededor de la posición de la puerta 40 es más suave que la del punto A. El perfil en el punto C muestra solo un borde ascendente alrededor de la posición de la puerta 40, correspondiente a la reflexión del plástico. lámina. La variación de la pendiente del borde ascendente alrededor de la posición de la puerta 40 entre diferentes puntos es inducida por la reflexión no uniforme de la superficie de la placa de plástico.
Los resultados demuestran la capacidad de una cámara SPAD temporizada para realizar la detección de múltiples objetos espacialmente superpuestos. Tenga en cuenta que el esquema propuesto se puede aplicar a la detección de más de dos picos de reflexión. Un escaneo más fino de la ventana de la puerta virtual en el posprocesamiento permite la detección sistemática de múltiples picos. La distancia mínima resoluble entre dos materiales reflectantes vecinos está limitada fundamentalmente por el tiempo finito de subida o bajada del perfil de la ventana de la puerta, que corresponde a 5-10 cm en este sensor SPAD.
En conclusión, se ha informado por primera vez de un sensor de imagen SPAD dependiente del tiempo de 1 megapíxel. En la investigación de SPAD, lograr un sensor SPAD de megapíxeles se ha considerado uno de los hitos más importantes durante más de una década. El sensor se aplica a imágenes 2D de alto rango dinámico e imágenes 3D de alta resolución espacio-temporal. Hasta donde sabemos, la detección de múltiples objetos espacialmente superpuestos con el esquema de control de tiempo de un solo fotón se ha demostrado experimentalmente por primera vez.
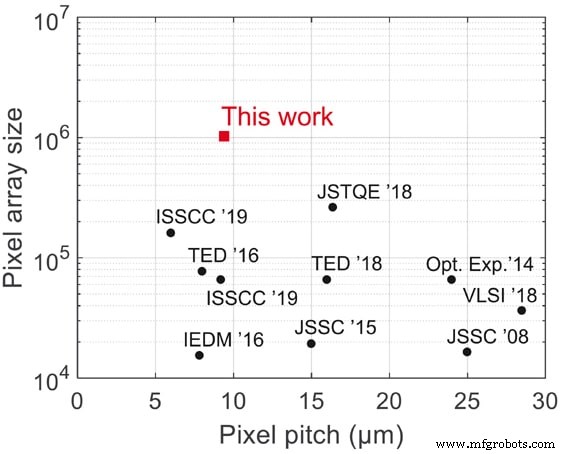
La figura 5 muestra una comparación de vanguardia del tamaño de matriz y el tamaño de la matriz de SPAD. El tamaño de la matriz del sensor es el más grande, casi 4 veces mayor que el del sensor de última generación, mientras que el paso de píxeles es uno de los más pequeños. Debido a sus capacidades de imágenes 2D y 3D de alta resolución, el sensor propuesto será útil en una amplia variedad de aplicaciones industriales, como seguridad, automoción, robótica, biomédica y aplicaciones científicas, incluidas imágenes cuánticas y de ultra alta velocidad.
Lea un informe completo sobre la tecnología de la revista científica Optica .
Este artículo fue escrito por Edoardo Charbon, Profesor, EPFL Suiza (Lausana, Suiza). Para obtener más información, visite aquí .
Sensor
- Cámara
- Inversiones en tecnología de fabricación:pospandémica
- Lector de libros BrickPi
- Tecnología de movimiento lineal
- Cámara sin lente multidisparo
- Escáner corporal de ondas milimétricas de alta definición
- Guía de proveedores 2021:Sensores
- Recolector de energía térmica sándwich piroeléctrico
- Cámara plenóptica
- Matriz de nanosensores de lengua electrónica
- placa de circuito impreso 101