


Comparación de esquemas de direccionamiento automático de acceso para automóviles
Los sistemas de acceso para automóviles que usan Bluetooth Low Energy generalmente tienen un módulo central y múltiples módulos / nodos satelitales, que se comunican a través de un bus de red de área de controlador (CAN) o buses de red de interconexión local (LIN). Los módulos de satélite están distribuidos físicamente alrededor del automóvil para mejorar el rango de comunicación de Bluetooth.
A los diseñadores de sistemas les gustaría mejorar la capacidad de fabricación del módulo satélite diseñando una PCB con software idéntico para que la instalación en el automóvil sea independiente de la posición del nodo Bluetooth. Sin embargo, dado que el hardware y el software de cada nodo satélite en el momento de la instalación es idéntico, se necesita un esquema para permitir que el módulo central asigne una dirección CAN o LIN única a cada nodo satélite después de que los módulos se instalen en el vehículo.
Una opción es utilizar una red LIN en cadena tipo margarita dedicada para compartir las ID de CAN con los módulos durante la fabricación. En este escenario, el módulo central utiliza la interfaz LIN para direccionar cada módulo satélite, pero la interfaz LIN no se volverá a utilizar durante la vida útil del vehículo. Otra opción reemplaza el bus LIN dedicado con una implementación discreta que reduce los costos de la lista de materiales (BOM). Para recortar aún más los costos del sistema, una verdadera opción inalámbrica que usa solo Bluetooth, y sin hardware adicional, reutiliza la infraestructura de Bluetooth ya disponible en los nodos para abordar los módulos.
En última instancia, el método inalámbrico reduce la lista de materiales, el cableado del sistema y el costo de almacenar, administrar y ensamblar los componentes ahora innecesarios. Este artículo presenta una descripción general de los métodos de direccionamiento automático por cable antes de profundizar en el método inalámbrico.
Los sistemas de acceso para automóviles de automóviles han tendido a utilizar Bluetooth Low Energy para el teléfono como llave u otras capacidades de llave digital. Estos sistemas funcionan de manera similar a los sistemas de arranque pasivo de entrada pasiva, pero agregan la capacidad de usar el teléfono inteligente del conductor como la llave, reemplazando así los llaveros tradicionales. Los vehículos compatibles con Phone-as-a-key implementan un módulo central o módulo de llave inteligente y varios módulos satelitales, cada uno capaz de recibir una señal Bluetooth desde un teléfono inteligente o llavero. Un sistema típico puede tener entre seis y 12 módulos satélite, además del módulo central (Figura 1).
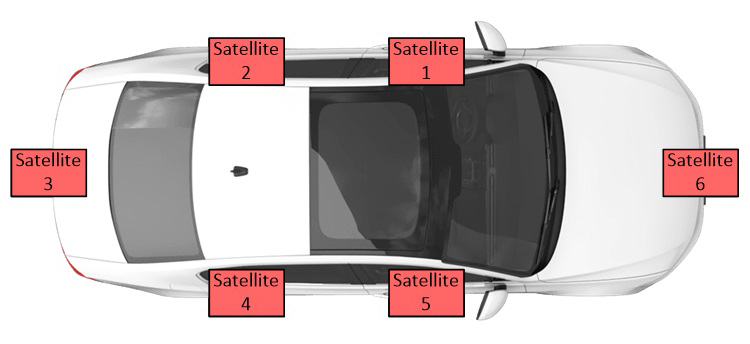
Figura 1. Este diagrama muestra dónde se pueden distribuir los módulos satelitales Bluetooth en todo el automóvil.
Los consumidores necesitan el sistema de teléfono como llave para poder determinar cuándo el teléfono o el llavero están dentro de la zona de desbloqueo del vehículo. Para aproximar la ubicación del teléfono inteligente o llavero, el sistema triangula las señales recibidas por varios módulos de satélite, que se distribuyen por todo el automóvil en lugares como la puerta del lado del pasajero, el panel de balancines, el maletero o los parachoques.
El módulo central del vehículo se comunica con los módulos satélites mediante una interfaz de comunicación como bus CAN o bus LIN. El módulo central utiliza los datos recibidos de cada módulo de satélite para triangular la ubicación del teléfono inteligente o el llavero y luego determina si se debe otorgar acceso de entrada al automóvil. La Figura 2 ilustra cómo se puede utilizar un bus CAN como red de comunicación principal entre los módulos central y satélite.
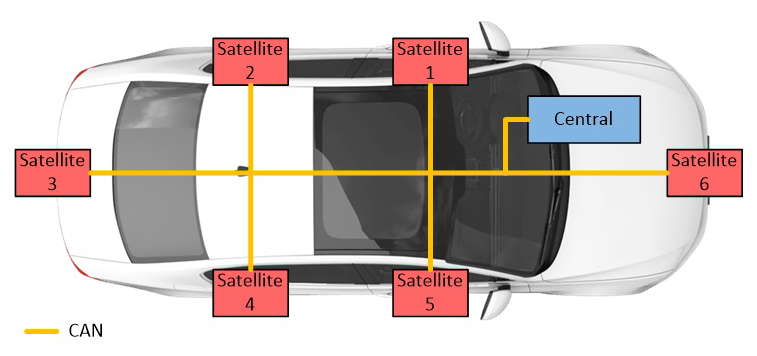
Figura 2. Se puede asumir que un bus CAN es la red de comunicación principal entre los módulos central y satélite en una red de sistema de acceso para automóviles Bluetooth.
La dirección del bus CAN de los módulos satélite permite al módulo central determinar de qué módulo satélite está recibiendo datos. El módulo central asocia la dirección o el ID CAN exclusivo con la ubicación de cada módulo satélite específico, determinada por el diseño general del sistema. En lugar de tener un PCB único para cada módulo satélite, con la dirección del bus conectada o codificada, sería ventajoso tener un diseño de PCB único que ejecute una única versión de firmware para todos los módulos satélite. Esto evita el costo adicional y los problemas de logística relacionados con la fabricación y la gestión de inventario de seis, ocho o más unidades casi idénticas. Un diseño único también simplifica la fabricación al permitir la instalación del mismo módulo satélite en cualquier lugar del vehículo.
Dado que el hardware y el software de los nodos satélite son todos idénticos y no están direccionados en el momento de la instalación, se requiere un esquema que permita al módulo central asignar una ID o dirección CAN única a cada módulo satélite después de la instalación en el automóvil.
Direccionamiento automático por cable:método de conexión en cadena LIN
En la actualidad, la asignación de direcciones de bus CAN a módulos de satélite en automóviles se logra utilizando una red de comunicación separada (como LIN) con los satélites conectados en cadena en el bus (Figura 3). El módulo central envía una dirección de red de bus CAN al primer nodo satélite a través del bus LIN. Una vez completado, el primer nodo satélite enviará la siguiente dirección recibida del módulo central al segundo satélite utilizando el bus LIN. Este proceso continúa hasta que todos los satélites hayan recibido sus direcciones CAN únicas.
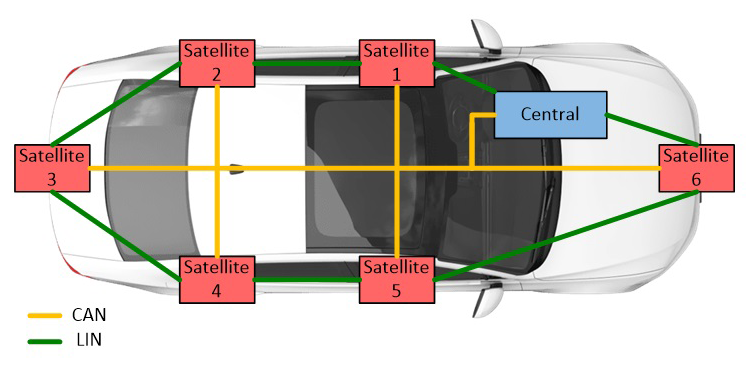
Figura 3. Esta arquitectura de direccionamiento automático utiliza una cadena LIN para enviar los ID CAN únicos a los satélites.
Este esquema requiere dos capas físicas LIN (PHY) por módulo, una para recibir datos y otra para transmitir datos. Los LIN PHY solo se utilizan durante la operación de direccionamiento automático. Una vez que los satélites están programados, todas las comunicaciones de datos estándar se logran a través del bus CAN de acceso al automóvil. Un automóvil típico puede tener de seis a 12 módulos satélite, lo que significa que requerirá entre 14 y 26 LIN PHY para admitir la operación de direccionamiento automático de una sola vez, lo que aumenta significativamente la lista de materiales de PCB del vehículo, el costo del sistema y la complejidad.
Direccionamiento automático por cable:método de un solo cable
Texas Instruments ha desarrollado un método alternativo para reducir el costo de BOM de cada módulo al reemplazar los LIN PHY dedicados con direccionamiento automático por un MOSFET y algunas resistencias. La principal diferencia en el software de direccionamiento automático de este esquema es que todos los módulos de satélite están programados para que el sistema de chip Bluetooth (SoC) ignore el bus CAN hasta que se reciba una señal de activación en la línea P_IN. La Figura 4 muestra el diagrama de bloques.
haga clic para ampliar la imagen
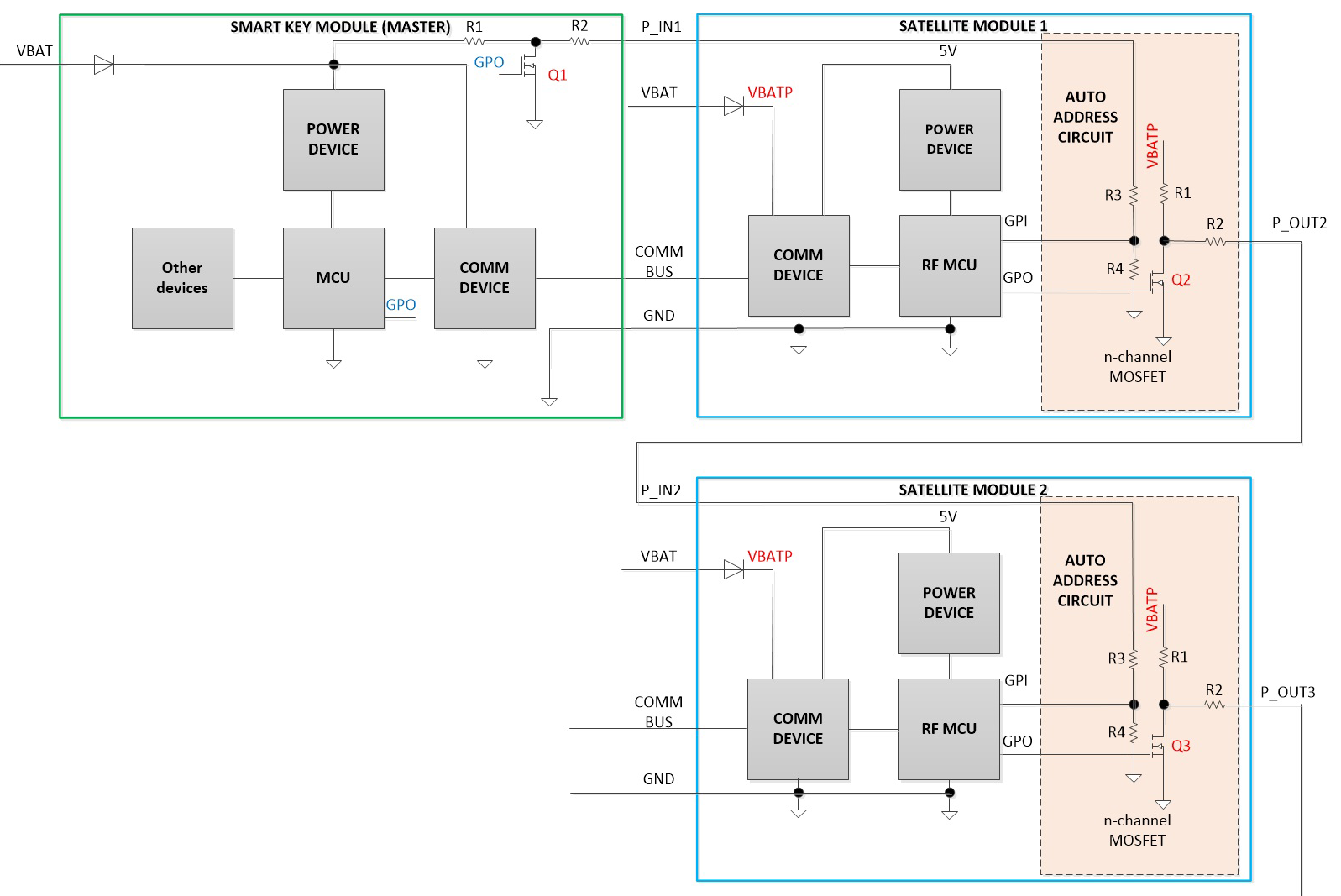 Figura 4. El método de direccionamiento automático de un solo cable reemplaza los LIN PHY con un MOSFET y algunas resistencias.
Figura 4. El método de direccionamiento automático de un solo cable reemplaza los LIN PHY con un MOSFET y algunas resistencias.
El módulo central inicia el proceso de direccionamiento automático enviando una señal de modulación de ancho de pulso (PWM) en la línea P_IN1 usando el transistor de efecto de campo Q1. A través de un divisor de voltaje, el primer módulo de satélite recibe la señal de activación del nivel de batería, P_IN1, que indica a la MCU Bluetooth que “escuche” el bus CAN. En paralelo, el módulo central comienza a transmitir constantemente el primer ID de CAN del módulo satélite en el bus CAN. Una vez que el primer módulo satélite recibe el mensaje CAN ID, envía un mensaje de confirmación al módulo central para reconocer la recepción adecuada de la dirección. Después de enviar el mensaje de reconocimiento, el primer módulo de satélite envía la señal de activación de PWM al segundo módulo de satélite, indicando a ese módulo que comience a escuchar el bus CAN y reciba su nueva ID de CAN. Después de que el módulo central recibe el mensaje de reconocimiento del primer módulo satélite, el bus CAN transmitirá constantemente el mensaje de ID de CAN del segundo módulo satélite hasta que reciba un mensaje de reconocimiento del segundo módulo satélite.
En resumen, cada módulo satélite, uno por uno, despierta al siguiente para recibir la ID CAN del bus CAN. El módulo central incrementa la siguiente ID de CAN transmitida después de recibir un mensaje de confirmación del módulo satélite direccionado hasta que todos los módulos son direccionados *.
Si bien es una mejora, esta implementación aún requiere cableado entre el módulo central y cada uno de los módulos satélite como se muestra en la Figura 5.
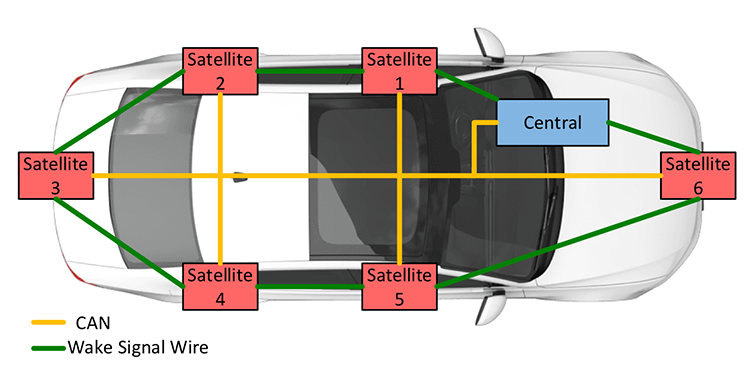
Figura 5. La arquitectura de direccionamiento automático de un solo cable aún requiere cableado entre los módulos central y satélite.
Reemplazo de cable / direccionamiento automático inalámbrico
Texas Instruments también ha desarrollado un método de direccionamiento automático que utiliza técnicas de localización Bluetooth. Estas técnicas permiten que a los módulos satélite Bluetooth se les asigne una dirección CAN desde el módulo central durante la fabricación y después de que se reemplaza un módulo. El proceso de direccionamiento del módulo comienza con el módulo que se determina que está más cerca del módulo central y continúa en el orden de la distancia más cercana a la más lejana hasta que se direcciona el módulo más lejano. La ubicación real no es necesaria, ya que la ubicación de los módulos, la técnica de medición y los alrededores del módulo determinarán la distancia medida. La distancia dn representa la distancia medida (a partir de la indicación de intensidad de la señal recibida por Bluetooth [RSSI]), idealmente:
d1
Por ejemplo, la Figura 6 muestra el diagrama de bloques y la distancia entre cada módulo y el módulo central.
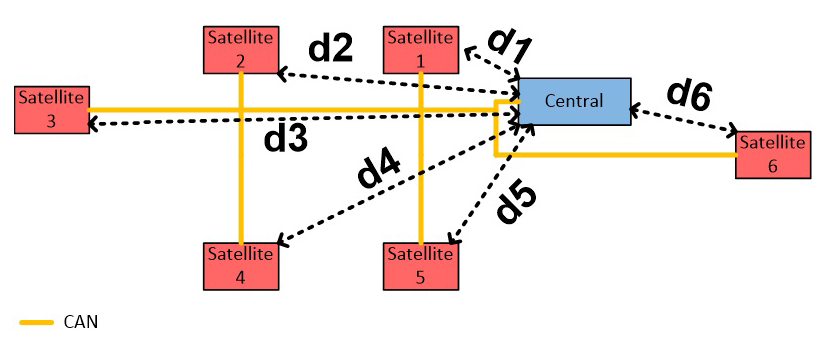
Figura 6. Este diagrama muestra las distancias entre cada módulo en el método de direccionamiento automático inalámbrico desde el módulo central.
En la práctica, la distancia real puede variar de la distancia medida debido a las características de propagación de radiofrecuencia (RF) del espacio entre el satélite particular y el módulo central. Pero, siempre que la distancia medida desde cada módulo satélite sea repetidamente constante y no haya superposición entre las distancias medidas de varios módulos, el módulo central puede abordarlos correctamente sin conocer su ubicación exacta alrededor del vehículo porque las distancias medidas siempre serán en el mismo orden del más corto al más lejano. Por lo tanto, el módulo central sabrá, a partir de pruebas previas, que el primer módulo es siempre la puerta del lado del conductor (dirección CAN 1), el segundo módulo es siempre el parachoques delantero (dirección CAN 2), y así sucesivamente.
Para garantizar que el esquema de direccionamiento automático funcione de manera confiable, se deben realizar pruebas cuidadosas para comprender las características de cada modelo de vehículo, lo que permite identificar y resolver cualquier problema potencial. Por ejemplo, si las medidas de distancia del módulo central entre dos o más módulos satélite no direccionados son similares o iguales, se puede utilizar un módulo satélite direccionado previamente para localizar aquellos módulos no direccionados que no fueron distinguibles por el central, como se muestra en la Figura 7. Esto puede también puede realizarse utilizando varios módulos satélite.
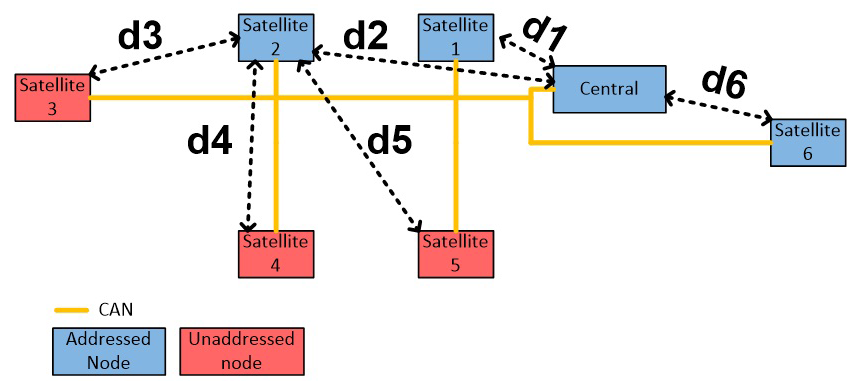
Figura 7. Un módulo satélite previamente direccionado se puede utilizar para localizar módulos no direccionados que no fueron distinguidos por el maestro.
Cuando el módulo central puede localizar los satélites 1, 2 y 6, pero no 3, 4 y 5, el módulo de satélite 2 se utiliza para medir las distancias de los módulos de satélite 3, 4 y 5. De nuevo, siempre que las mediciones de distancia son consistentes y no hay superposición en las mediciones de distancia entre módulos, los módulos satélite se pueden direccionar correctamente y siempre se direccionarán en el mismo orden.
Implementación
Para ser coherentes con la capa de perfil de acceso genérico (GAP) del protocolo Bluetooth Low Energy, nos referiremos al módulo central como un "escáner" y a los módulos satelitales como "anunciantes". La capa GAP maneja los modos y procedimientos de acceso del dispositivo, incluido el descubrimiento de dispositivos, el establecimiento de enlaces, la terminación de enlaces, el inicio de las funciones de seguridad y la configuración del dispositivo. Los dos estados del dispositivo relevantes para el direccionamiento automático son:
- Anunciante:el dispositivo se anuncia con datos específicos que le permiten a cualquier dispositivo iniciador saber que es un dispositivo conectable (Nota:este anuncio contiene la dirección del dispositivo y puede contener algunos datos adicionales como el nombre del dispositivo).
- Escáner:al recibir el anuncio, el dispositivo de escaneo envía una solicitud de escaneo al anunciante.
El anunciante responde con una respuesta de escaneo; este proceso se denomina descubrimiento de dispositivos. El dispositivo de escaneo es consciente del dispositivo de publicidad y puede iniciar una conexión con él. La Figura 8 muestra el flujo del anunciante y el escáner a continuación.
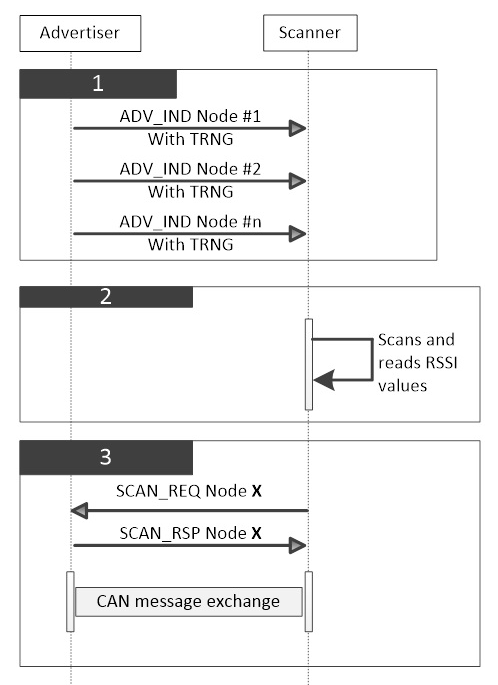
Figura 8. Este diagrama del software Bluetooth Low Energy muestra el flujo del anunciante y del escáner.
Al observar la Figura 8, todos los anunciantes anunciarán con datos específicos, generarán un número aleatorio verdadero que se utilizará como parte de sus datos publicitarios. Esto garantiza que no haya duplicación de nodos.
El escáner escaneará varias veces y leerá los valores RSSI de cada uno de los anunciantes; luego promediará los valores RSSI para determinar el anunciante más cercano a él.
El escáner enviará una solicitud SCAN al anunciante más cercano; luego transmitirá el mensaje CAN de dirección automática y esperará el acuse de recibo del mensaje CAN del anunciante.
El anunciante utilizará SCAN_REQ para habilitar la dirección automática CAN. Cuando el anunciante recibe el mensaje CAN de dirección automática, enviará el mensaje de confirmación CAN y dejará de publicar anuncios.
Estos pasos se repiten hasta que se haya asignado una dirección automática a todos los anunciantes.
Resultados
Las pruebas se realizaron utilizando el diseño de referencia del módulo satelital CAN Bluetooth Low Energy + CAN de acceso al automóvil, junto con un arnés de 12 pies. La separación entre cada conector era de alrededor de 6 pies (Figura 9).
haga clic para ampliar la imagen
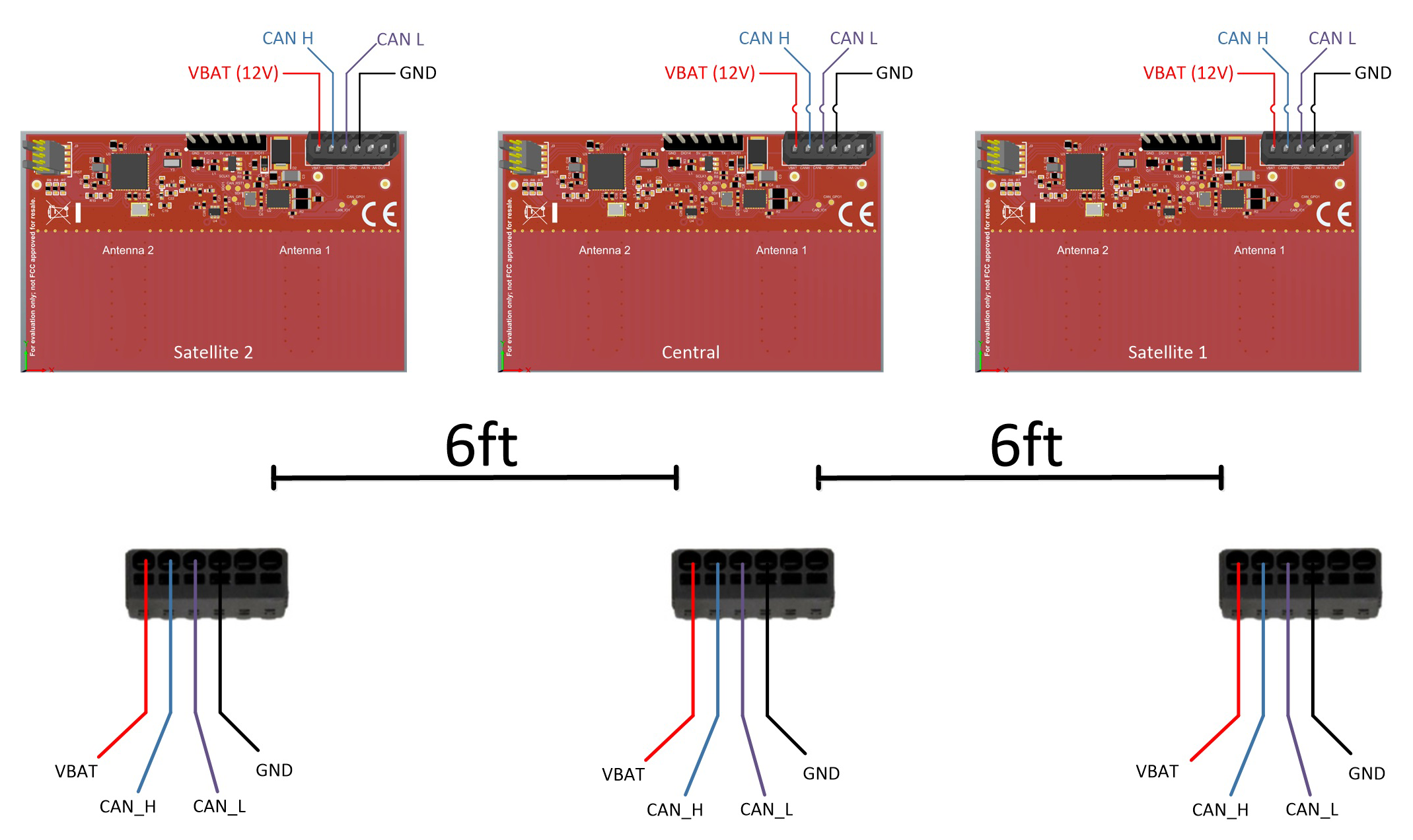
Figura 9. La configuración del hardware para las pruebas incluye el diseño de referencia TIDA-020032.
Y las tablas se colocaron como se muestra en la Figura 10 (donde d1 ~ 4 pies y d2 ~ 8 pies):
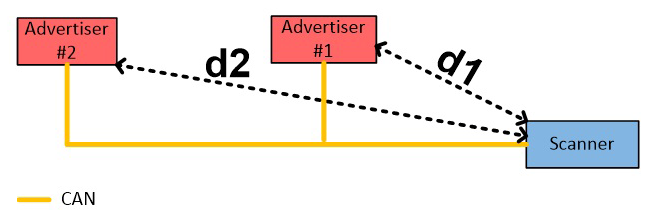
Figura 10. Este diagrama muestra la ubicación del hardware para la prueba.
Los parámetros de Bluetooth Low Energy para el escáner fueron una duración de escaneo de 1 segundo y una ventana e intervalo de escaneo de 250 ms. Los parámetros de Bluetooth Low Energy de los anunciantes para los anunciantes se anunciaron durante un intervalo de 100 ms. Durante cada período de medición, el escáner tomó 10 muestras de RSSI por nodo y promedió cada conjunto de mediciones para producir el valor de distancia medido de cada anunciante.
Comparación de tres esquemas de direccionamiento automático
Los resultados de la prueba anterior se resumen en la Tabla 1, que compara el retardo relativo, la confiabilidad y los costos de implementación de cada una de las tres técnicas de direccionamiento automático discutidas en este artículo.
Tabla 1. Comparación de técnicas de direccionamiento automático
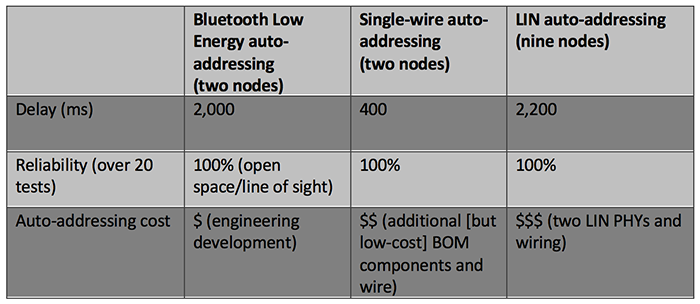
La Tabla 1 compara los resultados de nuestra prueba de direccionamiento inalámbrico Bluetooth de baja energía con las dos técnicas de direccionamiento automático por cable discutidas anteriormente. A partir de estos resultados, parece que la técnica inalámbrica tarda aproximadamente 5 veces más que las técnicas con cable. Se puede lograr una respuesta mejor y más rápida mediante un mayor refinamiento de los parámetros de la red Bluetooth Low Energy; Hay posibilidad de mejora. Esto requerirá más pruebas porque la distancia real puede variar de la distancia medida debido a las características de propagación de RF asociadas con la ubicación particular de cada nodo en el vehículo (es decir, desafíos sin línea de visión).
El direccionamiento automático inalámbrico es la solución más rentable desde la perspectiva de los materiales, ya que no requiere hardware adicional ni cableado adicional entre módulos. Sin embargo, para disfrutar de estas ventajas, los diseñadores de sistemas deberán realizar pruebas para proporcionar el rendimiento de RF para optimizar el software y tener en cuenta las inexactitudes. Si prefiere un enfoque cableado, el método de direccionamiento automático cableado de TI requiere la adición de algunos componentes pequeños y de bajo costo a la lista de materiales, junto con cables conectados entre cada módulo. Juntos, brindan un conjunto de opciones al elegir un método para implementar capacidades de direccionamiento automático para los sistemas de acceso para automóviles Bluetooth.
* Para obtener detalles adicionales y resultados de pruebas sobre el método de direccionamiento automático de un solo cable, consulte la guía de diseño de referencia del módulo satelital CAN Bluetooth Low Energy + CAN de acceso para automóviles de Texas Instruments.
Referencias
- Especificaciones principales de Bluetooth
- El estándar para la conexión establece nuevos estándares en seguridad, Bluetooth SIG
>> Este artículo se publicó originalmente el nuestro sitio hermano, EDN.
Incrustado
- Constructor C#
- Clase anidada de C#
- Sobrecarga del constructor de C#
- Diseñar con Bluetooth Mesh:¿Chip o módulo?
- Cervoz:SO-DIMM DDR4 de muy bajo perfil
- El chip de banda ultra ancha permite el acceso de vehículos desde un teléfono inteligente
- El pequeño módulo Bluetooth 5.0 integra una antena de chip
- Pequeño módulo de IA basado en Google Edge TPU
- El módulo de interfaz simplifica el diseño de WI-Fi 6
- ams:el módulo acelera el desarrollo de medidores de agua ultrasónicos
- Un pequeño módulo integra varios biosensores