


Guía del posicionador de soldadura 2026:elección de sistemas de 1, 2 y 3 ejes

Por el equipo editorial de EVST · Última actualización:11 de junio de 2026
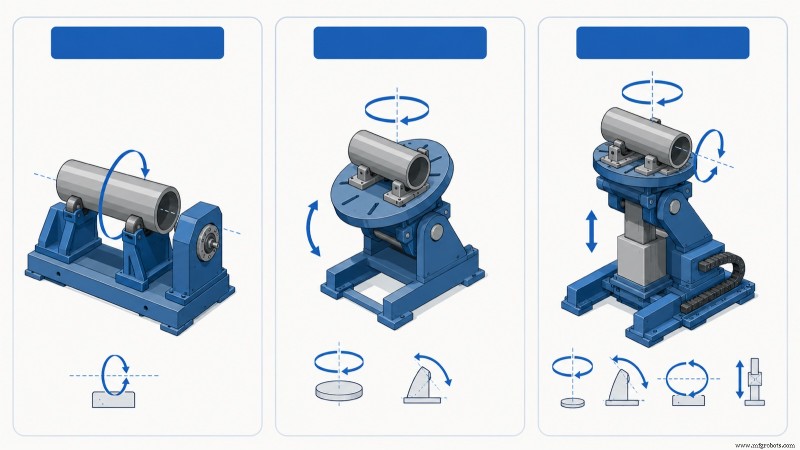
Un posicionador de soldadura es una máquina motorizada que gira, inclina o levanta una pieza de trabajo para que se pueda acceder a cada costura de soldadura en una orientación plana u horizontal:las posiciones que ofrecen la mayor calidad de soldadura y tasas de deposición. Los posicionadores se clasifican según el número de ejes motorizados:las unidades de un solo eje giran sobre un eje, las unidades de dos ejes añaden una función de inclinación y las unidades de tres ejes introducen una segunda rotación o elevación vertical. La selección de la configuración correcta depende de la geometría de la pieza, el peso y si la soldadura la realiza un operador humano o un robot.
Por qué es importante un posicionador de soldadura
La calidad de la soldadura está intrínsecamente ligada a la posición de la soldadura. AWS D1.1, el código de soldadura de acero estructural, especifica que las posiciones plana (1G/1F) y horizontal permiten una mayor corriente, un desplazamiento más rápido y una fusión superior porque la gravedad estabiliza el baño fundido. Un posicionador mantiene las costuras en estas orientaciones favorables a medida que avanza la soldadura, eliminando la necesidad de que el soldador o el robot persigan la costura alrededor de una pieza fija.
Los beneficios son triples:tasas de deposición más altas a partir de parámetros óptimos, tasas de defectos más bajas al evitar la soldadura fuera de posición (la principal causa de porosidad y falta de fusión) y tiempos de ciclo reducidos porque la pieza se indexa automáticamente a la siguiente costura en lugar de soltarse, rotarse y volverse a fijar manualmente. En una celda robótica, un posicionador permite que un solo brazo suelde geometrías complejas en un programa continuo. Para obtener una visión más amplia de la soldadura robótica, consulte nuestra guía de robots de soldadura para la industria pesada.
Las tres clases de posicionadores según el número de ejes
Cada posicionador de soldadura encaja en una de tres familias según sus ejes motorizados. El recuento de ejes determina qué costuras se pueden presentar planas y establece la primera especificación para el tamaño de las celdas.
Posicionadores de un solo eje
Las unidades de un solo eje proporcionan un único movimiento motorizado, generalmente rotación alrededor de un eje horizontal o casi horizontal. Son los caballos de batalla para piezas cilíndricas y rotacionalmente simétricas, como tuberías, carcasas de recipientes a presión, bridas y ejes. La pieza gira bajo un soplete fijo mientras la costura permanece en posición plana, ideal para soldaduras circunferenciales. La línea de un solo eje de EVST (Posicionador servo de caja principal de un solo eje, Servo posicionador horizontal de un solo eje y Posicionador de soldadura de un solo eje de cabezal y contrapunto) sujeta una pieza larga entre un cabezal accionado y un contrapunto de giro libre para que pueda girar sobre su propia línea central.
Posicionadores de dos ejes
Al agregar inclinación a la rotación, las unidades de dos ejes giran y se inclinan, lo que permite llevar cualquier cara de una pieza cuadrada o irregular a la posición plana. Esta clase es la más versátil para fabricación general, soldaduras, soportes, marcos y bases de máquinas con uniones en múltiples planos. El catálogo de dos ejes de EVST incluye configuraciones tipo L, tipo U, tipo C y tipo plataforma, que se diferencian principalmente en el soporte de la mesa y el espacio de inclinación alrededor de piezas voluminosas.
Posicionadores de tres ejes
Los posicionadores de tres ejes combinan rotación, inclinación y un tercer movimiento motorizado, normalmente un segundo giro o elevación vertical. El eje agregado mantiene la costura no solo plana sino también a una altura de trabajo y orientación constantes en relación con un robot, lo que simplifica la programación en ensamblajes grandes o altos. EVST enumera los servoposicionadores de tres ejes con giro vertical y giro horizontal para estas aplicaciones pesadas y ricas en geometría.
| Clase | Movimientos motorizados | Adecuado para | Emparejamiento típico |
|---|---|---|---|
| Eje único | Solo rotación | Tuberías, carcasas, bridas, ejes, uniones circunferenciales | Manual o robot único, antorcha fija |
| Dos ejes | Rotación + inclinación | Piezas soldadas, marcos, soportes con uniones multiplanas | Manual o robot, fabricación general |
| Tres ejes | Rotación + inclinación + segundo giro/elevación | Ensamblajes grandes, altos o con mucha geometría | Célula robótica, movimiento coordinado |
Cabezal/contrapunto frente a plato giratorio:un punto común de confusión
Los compradores a menudo preguntan si necesitan un “posicionador” o un “cabezal/contrapunto”. Estos términos describen cómo se admite la pieza en lugar de categorías en competencia. Un posicionador estilo plataforma giratoria apoya la pieza sobre una única mesa giratoria, en voladizo desde un lado. Una disposición de cabezal/contrapunto soporta una pieza larga en ambos extremos (un extremo se acciona mientras el otro está inactivo), de modo que la pieza gira sobre una línea central estable, similar a un torno.
La longitud y la esbeltez dictan la elección. Las piezas cortas y compactas caben cómodamente en un solo plato giratorio. Los ejes, vigas o rotores largos se combarían o azotarían si estuvieran en voladizo, lo que hace que un cabezal/contrapunto sea la solución correcta. Para piezas extremadamente largas, un contrapunto con su propio soporte motorizado o lunetas intermedias mantiene la deflexión dentro de la tolerancia. En la práctica, los ingenieros de EVST frecuentemente diseñan configuraciones de dos estaciones:una mesa de dos ejes para soportes compactos y un cabezal/contrapunto para marcos largos, en lugar de forzar a una sola máquina a realizar ambas tareas de manera deficiente.
Especificaciones que impulsan la selección
Una vez elegida la clase, una lista concisa de parámetros determina la máquina exacta. Estas son las cifras que un proveedor necesita cotizar y las que un comprador debe comparar con la parte más grande y pesada de la familia.
- Carga nominal — la masa máxima que soporta la mesa. Tamaño frente a la pieza más su fijación, no a la pieza desnuda.
- Centro de gravedad y excentricidad — la capacidad de carga disminuye a medida que el centro de gravedad de la pieza se aleja de la cara de la mesa y del eje de rotación. Un posicionador clasificado para una carga con el CoG en el eje puede sobrecargarse cuando la misma masa se monta descentrada.
- Velocidad de rotación y par — debe coincidir con la velocidad de recorrido de soldadura para el diámetro más grande, asegurando que la velocidad de la superficie en la costura permanezca dentro de la ventana del proceso.
- Rango de inclinación y velocidad — para unidades de dos y tres ejes, el recorrido angular que hace que cada costura quede plana, comúnmente hasta 90 o 135 grados, dependiendo del tipo de marco.
- Diámetro de la mesa y patrón de ranura en T — define cómo se monta el dispositivo y el tamaño máximo de pieza que admite la cara.
- Ruta actual de tierra/anillo colector — para soldar, el posicionador debe transportar corriente a través de la junta giratoria sin formar arcos a través de los cojinetes, lo que proporciona un anillo deslizante apto para soldadura.
El error de dimensionamiento más común es clasificar un posicionador únicamente en función del peso de la pieza de trabajo y ignorar la carga excéntrica. Una pieza pesada montada con su masa desplazada del eje de rotación impone un momento de giro que el accionamiento debe mantener en todos los ángulos; exceder el par nominal de inclinación o rotación causa calado o retroceso bajo carga. EVST publica límites de carga y momento por modelo a pedido en lugar de un único número de título porque el límite seguro depende de la ubicación de la masa.
Posicionamiento manual versus robótico
Un posicionador sirve a dos maestros distintos. En un taller manual o semiautomático, simplemente presenta la costura a un soldador humano a una altura y ángulo cómodos, mientras el operador controla la indexación. En una celda robótica, el posicionador se convierte en un eje de movimiento coordinado:el controlador del robot impulsa el posicionador y el brazo juntos para que la antorcha y la costura se muevan al mismo tiempo, manteniendo el ángulo de trabajo ideal a través de soldaduras curvas o compuestas.
El movimiento coordinado distingue un posicionador de soldadura robótico de una simple plataforma giratoria. Requiere que los servoejes del posicionador estén controlados o estrechamente sincronizados con el controlador del robot, razón por la cual los posicionadores de grado robot utilizan servoaccionamientos con codificadores absolutos en lugar de motores de frecuencia variable. Para obtener una construcción de celda completa, incluida una cotización de fuente de energía, robot y posicionador, consulte la guía de selección de celdas de robot de soldadura de EVST.
Cómo elegir:un camino de cinco pasos
- Perfil de la familia de piezas. Enumere las partes más grandes, pesadas y difíciles que debe manejar la celda. Tamaño al peor de los casos, no al promedio.
- Corregir el recuento de ejes. Rotación únicamente para piezas cilíndricas; agregue inclinación para uniones de varios planos; agregue un tercer eje solo cuando la geometría grande o alta requiera una altura de trabajo constante debajo de un robot.
- Elija el método de retención. Plato giratorio único para piezas compactas; cabezal/contrapunto para piezas largas o delgadas que se deformarían.
- Confirmar carga con excentricidad. Verifique la carga nominal en el desplazamiento real del centro de gravedad, incluido el dispositivo, no solo el peso de la pieza desnuda en el eje.
- Haga coincidir la interfaz de soldadura. Anillo colector apto para soldadura para la trayectoria de la corriente, servocontrol para la coordinación del robot y velocidades de desplazamiento que se alinean con su proceso.
Para obtener un recorrido modelo por modelo de la línea de posicionadores de EVST frente a los requisitos de carga útil e inclinación/rotación, con una ruta hacia una cotización, consulte la guía complementaria, Selección de posicionadores de soldadura EVST 2026. Para comparar un posicionador con máquinas alternativas de manipulación de piezas de trabajo, lea Posicionador de soldadura, plataforma giratoria y manipulador.
Gama de posicionadores de soldadura de EVST
EVST, con sede en Chengdu y fabricación en Wenling, produce posicionadores de soldadura en las tres clases de ejes como parte de su cartera de soldadura robótica. La gama publicada cubre unidades de un solo eje (servo de caja principal, servo horizontal y cabezal y contrapunto), unidades de dos ejes (tipo L, tipo U, tipo C y tipo plataforma) y servoposicionadores de tres ejes (giro vertical y giro horizontal). Las capacidades de carga, los tamaños de las mesas y los rangos de inclinación se cotizan por aplicación previa solicitud, porque la capacidad segura depende de la geometría de la pieza y del desplazamiento del centro de gravedad en lugar de solo de la masa.
Según el historial de certificación de EVST, su línea de producción de automatización de soldadura y robótica cuenta con la certificación de calidad de grado automotriz IATF 16949, y sus productos cuentan con certificaciones de terceros CE, SGS y TUV. Los posicionadores se suministran comúnmente como parte de una celda de soldadura completa junto con los robots de soldadura QJAR de EVST y la integración de la fuente de energía, por lo que los ejes de rotación e inclinación se ponen en marcha como un movimiento coordinado con el brazo en lugar de como una mesa independiente.
Preguntas frecuentes
¿Para qué se utiliza un posicionador de soldadura?
Un posicionador de soldadura gira, inclina o levanta una pieza de trabajo para que cada costura de soldadura pueda llevarse a la posición plana u horizontal, donde la calidad de la soldadura y la tasa de deposición son más altas. Mejora la calidad de la soldadura, aumenta el rendimiento al evitar la soldadura fuera de posición y, en una celda robótica, permite que un brazo suelde una pieza compleja en un único programa continuo.
¿Cuál es la diferencia entre posicionadores de uno, dos y tres ejes?
Un posicionador de un solo eje gira la pieza en un eje, adecuado para piezas cilíndricas y costuras circunferenciales. Un posicionador de dos ejes agrega inclinación, de modo que las uniones en múltiples caras de una pieza cuadrada se pueden presentar planas. Un posicionador de tres ejes añade un segundo giro o elevación vertical, y se utiliza en ensamblajes grandes o altos donde un robot necesita que la costura se mantenga a una altura y orientación constantes.
¿Cuándo necesito un cabezal/contrapunto en lugar de un plato giratorio?
Utilice un cabezal/contrapunto cuando la pieza sea larga o delgada, como un eje, una viga o un rotor, que se combaría o azotaría si se apoyara en un solo lado. El cabezal accionado y el contrapunto en ralentí mantienen la pieza en una línea central estable para que gire correctamente. Las piezas cortas y compactas pueden asentarse sobre una única plataforma giratoria.
¿Cómo dimensiono correctamente un posicionador de soldadura?
Compárelo con la pieza más grande y pesada de la familia, incluido su accesorio, y verifique la carga nominal en el desplazamiento real del centro de gravedad, no solo el peso desnudo en el eje de rotación. La carga excéntrica impone un momento de giro que el accionamiento debe mantener en todos los ángulos; ignorarlo es el error de tamaño más común. Confirme el par de rotación e inclinación con el peor de los casos con el proveedor.
¿Puede un posicionador de soldadura funcionar con un robot?
Sí. En una celda robótica, el posicionador se convierte en un eje de movimiento coordinado impulsado o sincronizado con el controlador del robot, de modo que la antorcha y la costura se mueven juntas para mantener el ángulo de trabajo ideal. Los posicionadores de calidad robótica utilizan servoaccionamientos con codificadores absolutos y un anillo deslizante apto para soldadura para transportar corriente a través de la junta giratoria. Esto es lo que distingue a un posicionador de soldadura robótico de una simple plataforma giratoria.
Adónde ir a continuación
Para hacer coincidir un posicionador con una carga útil específica y un requisito de inclinación/rotación con una ruta para obtener una cotización, consulte la guía del sitio del producto EVST para seleccionar el posicionador de soldadura EVST de uno a tres ejes. Para decidir entre un posicionador y otras máquinas de manipulación, lea posicionador de soldadura versus plataforma giratoria versus manipulador. Para conocer la celda de soldadura robótica completa, consulte nuestra guía de robots de soldadura y la guía de selección de celdas. Si tiene preguntas sobre adquisiciones, puede comunicarse con el departamento de ventas de EVST a través de la página de contacto.
Acerca del autor:El equipo editorial de EVST escribe sobre robótica industrial y fabricación inteligente para ingenieros y líderes de operaciones que evalúan proyectos de automatización. EVST (EVS TECH CO., LTD), fundada en Chengdu en 2018, ha realizado más de 600 proyectos de automatización y envíos a más de 100 países, con certificación de grado automotriz IATF 16949 y certificaciones de terceros CE/SGS/TUV en las familias de productos QJAR, robot colaborativo, SCARA y delta.
Robot industrial
- Automatización de desbarbado:suavizado de bordes ásperos
- ABB evita la subcontratación
- Cómo la automatización de la pintura reduce los peligros
- Los pormenores de las celdas de trabajo robóticas
- Ahorro de costos con robots
- Eche un vistazo al futuro de los robots colaborativos
- El funcionamiento interno del Motoman SV3
- Potencia compacta con Motoman HP3JC
- El robot Fanuc M1iA/0.5SL
- Nuevo controlador Motoman hasta 4 veces más rápido
- La diferencia entre la automatización robótica de procesos y la automatización de pruebas