


Stringent, el trazador de pared de $ 15
Componentes y suministros
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Antecedentes
No recuerdo muy bien cuándo empezó, pero creo que alrededor de 1999. Un amigo y yo que estaba interesado en todo lo relacionado con la robótica y la electrónica estábamos discutiendo la construcción de un robot para dibujar en pizarrones. Por supuesto, nunca tuvimos tiempo de hacer nada serio en ese entonces, el ecosistema para los microcontroladores aficionados no era lo que es hoy.
En 2002, mi amigo me mostró el asombroso trabajo de Jürg Lehni y Uli Franke - Hektor. ¡Me complació mucho ver que algo similar a lo que habíamos soñado construir se construyera y compartiera con el mundo! Yo estaba en paz.
Algún tiempo después, recuerdo haberle mostrado el sitio web del proyecto Hektor a alguien presentando lo fantástico que pensaba que era. Sin embargo, esta vez comencé a mirar más a los detalles y me di cuenta de que carecía de una propiedad que inicialmente había imaginado que tendría un plotter de pared. Quería que fuera autónomo, todo en una unidad con solo cables que lo conectaran a la pared. Si lo recuerdo correctamente, miré los pesos de los motores paso a paso en este punto y me di cuenta de que mi idea no iba a funcionar.
Pasó el tiempo y sucedieron cosas en el espacio de la robótica aficionada. Era 2014 y había estado usando Arduinos y RC-servos para varios proyectos de control de cámara, tenía acceso a la impresión 3D y, de hecho, algo de tiempo libre (!?!). Después de tropezar con el motor paso a paso 28BYJ-48 muy barato, supe exactamente lo que iba a construir:
El plotter de pared minimalista más barato posible.
Primer intento
Después de esperar una eternidad, cinco semanas más o menos, por las piezas encargadas a China, comencé a construir el trazador. Traté de hacer un esqueleto lo más compacto posible para adaptarse a un Arduino Uno, paso a paso, servo y una batería. No puedo recordar cuántos diseños estúpidos, quiero decir menos inteligentes, hice en OpenSCAD antes de que cayera el centavo. ¡Debes cruzar los hilos!
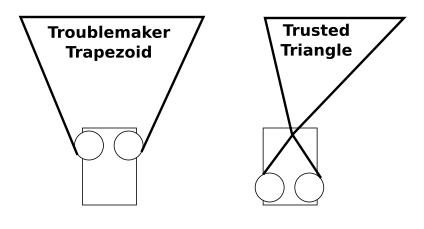
Tener la geometría de cruce viene con un gran beneficio para mantener la posición correcta en la pared. La desventaja es que obtienes menos estabilidad al girar alrededor del eje vertical. Esto se solucionó agregando algunas bridas en las esquinas del trazador, ajustadas para que impidan la rotación.
El primer trazador El hardware llegó a parecerse a la imagen de abajo. En mi búsqueda de las piezas más baratas posibles, elegí usar hilo de coser para la navegación y la cancelación de la gravitación. Los hilos se cruzaron en la parte superior del chasis impreso en 3D a través de pequeños orificios en la impresión. Como se puede (casi) ver, es una geometría desafiada lograr que los hilos funcionen limpios desde el lápiz y los cables (falta el cableado de Arduino al controlador paso a paso derecho en la imagen, por lo que se ve menos mal de lo que era). El lápiz se levanta de la superficie de dibujo mediante un servo RC que empuja todo el trazador lejos de la pared.
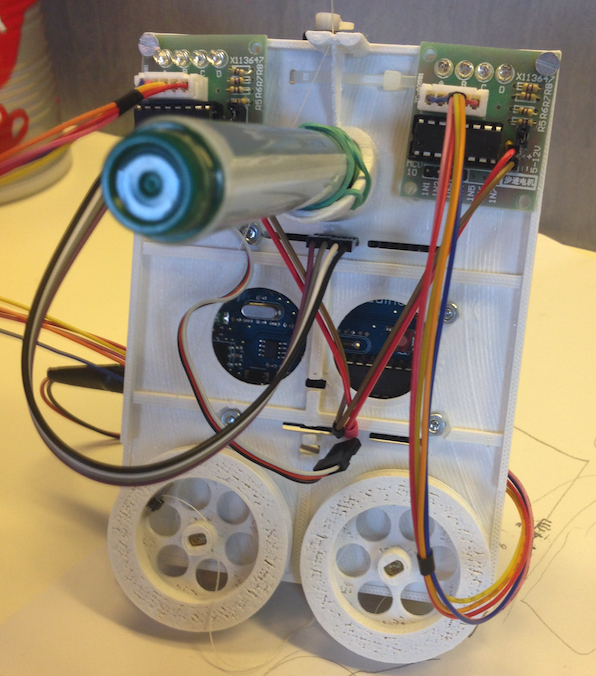
Este primer trazador tenía un diseño codificado escrito en su programa en el Arduino. La configuración del plotter se realizó con un metro de hilo enrollado en cada lado y sujetándolos a un metro de distancia. Con esta configuración, el trazador conocía el sistema de coordenadas al encenderse y podía comenzar a dibujar las rutas en su memoria. Funcionó, pero fue un desastre de usar. Tener que volver a flashear el Arduino cuando se cambia de diseño no fue agradable. Además, estar restringido a la configuración de disparidad de un metro fue frustrante.
Sin embargo, fue una buena plataforma para comprender mejor el espacio del problema. Algunos aprendizajes rápidos:
- Los motores paso a paso no son tan fuertes: Los carretes eran demasiado grandes .
- La punta del bolígrafo se desplaza desde el cruce de las cuerdas - Oscilación perversa
Lo bueno de estos problemas fue que me obligaron a esforzarme en implementar una aceleración y un frenado razonables ...
Evolución
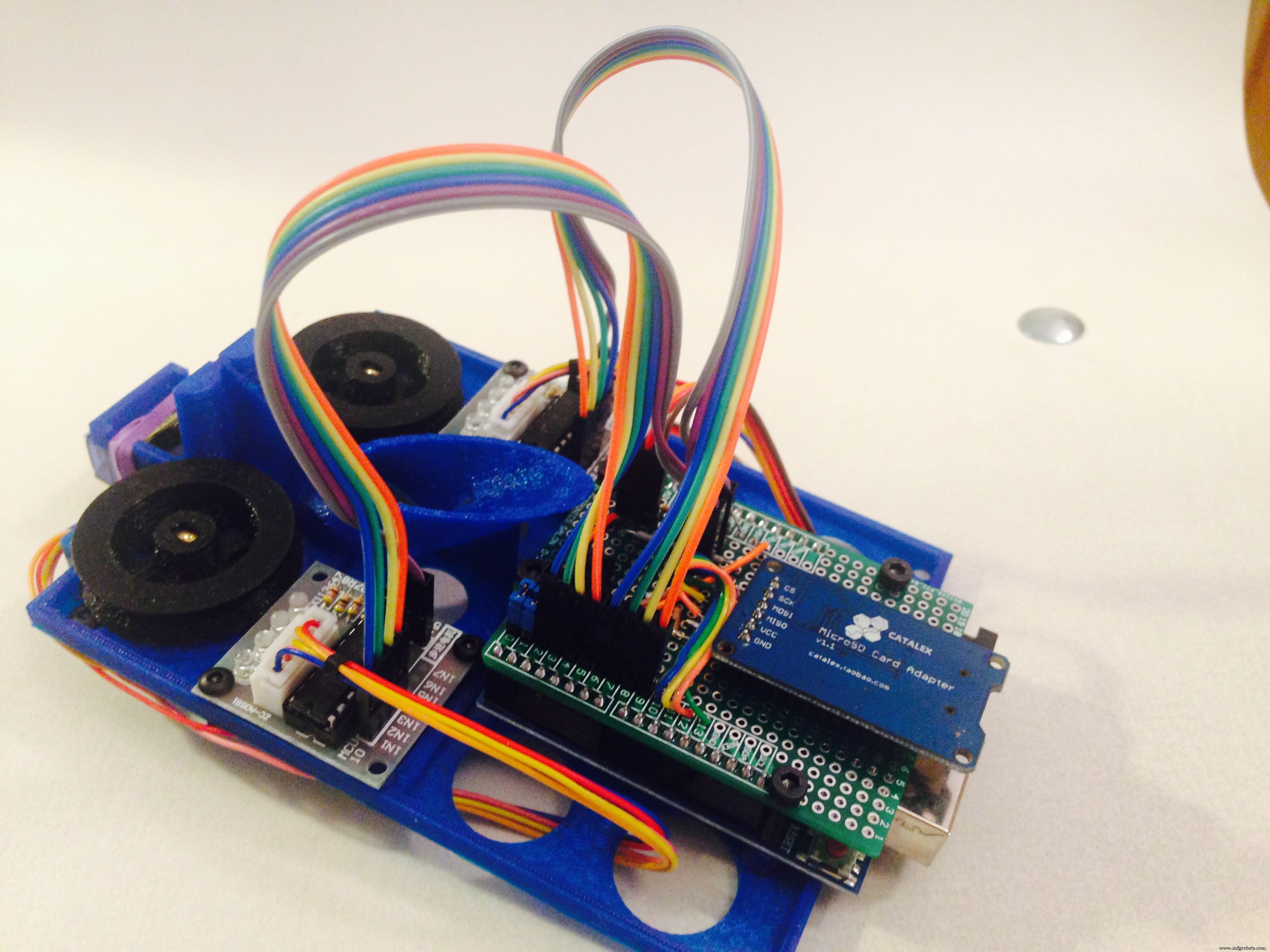
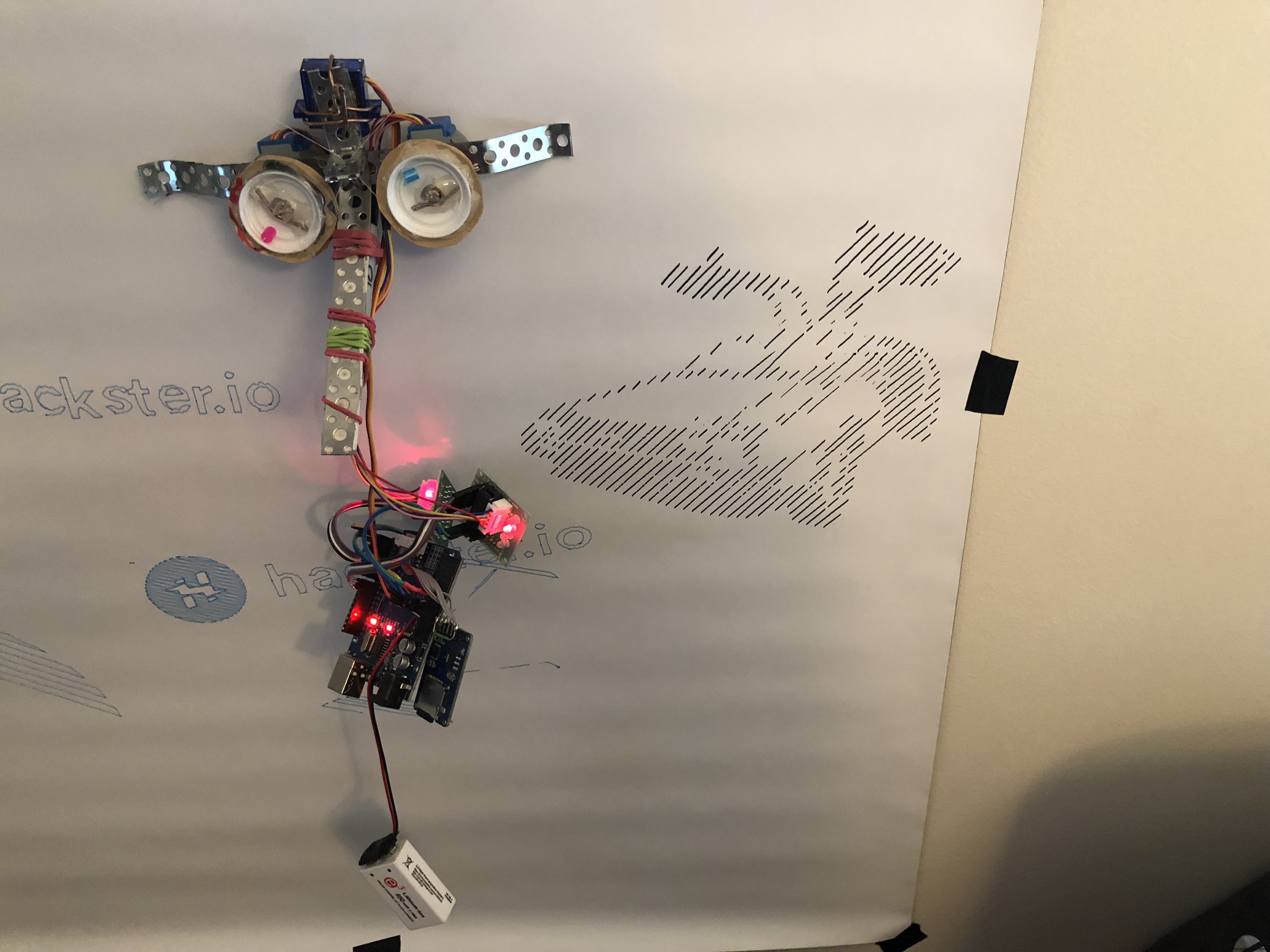
Trazador número dos (el blanco en la imagen de portada) obtuvo algunas mejoras:
- Bobinas más pequeñas.
- Los carretes se movieron por encima de la pluma para un mejor enrutamiento del hilo y menos movimiento pendular.
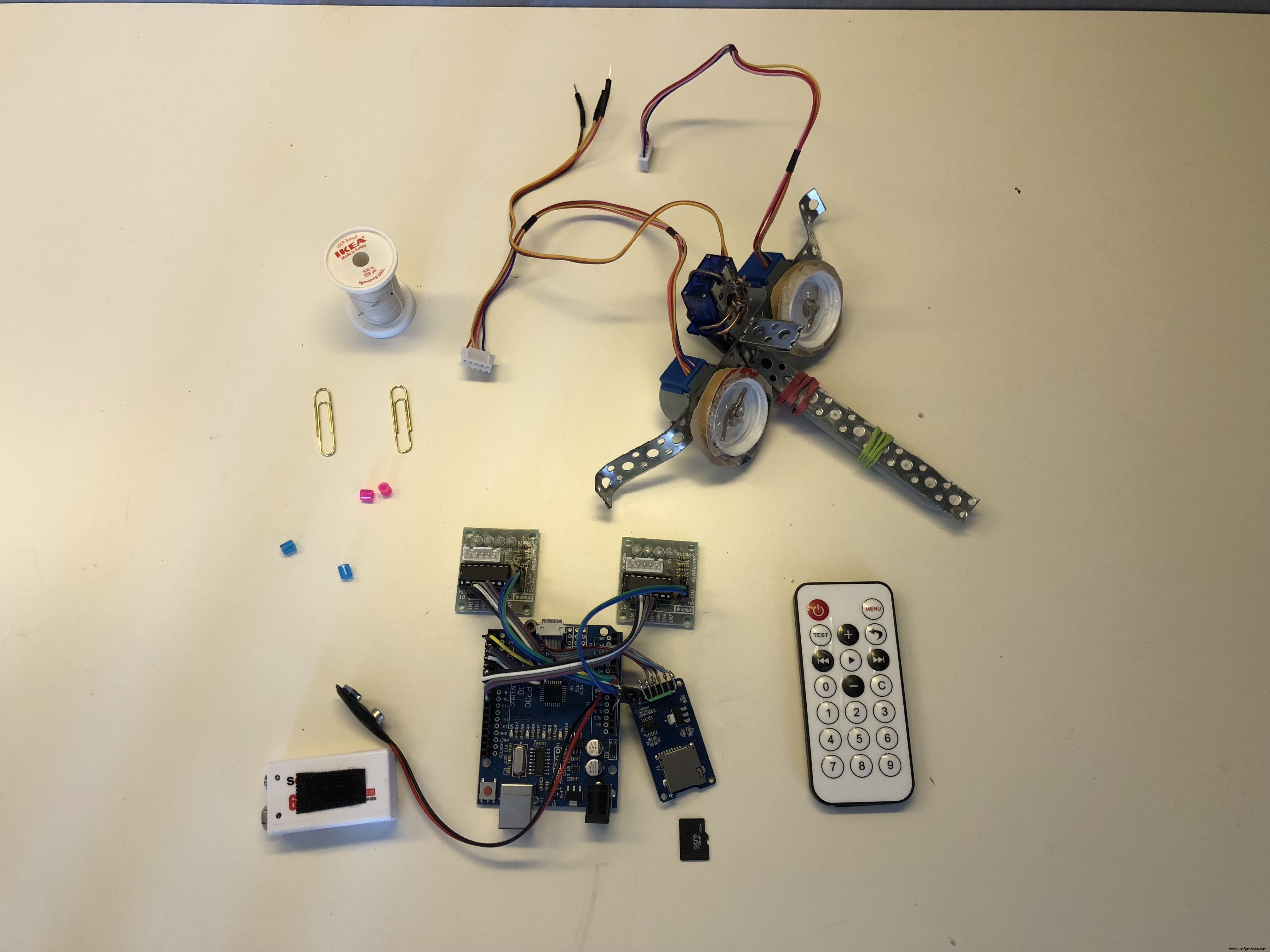
- Electrónica más accesible.
- Tarjeta SD para almacenar qué trazar.
- Nuevo proceso de configuración que permite una distancia variable entre los puntos de anclaje.
- Receptor de infrarrojos para poder controlarlo todo desde un mando a distancia.
Agregar un lector de tarjetas SD y un receptor de infrarrojos fue mucho más fácil de lo que esperaba. Fue uno de esos momentos de "por qué no hice esto desde el principio". El nuevo proceso de configuración funcionó bastante bien y dio mucha más flexibilidad para dibujar tanto grandes como pequeños. La parcela más grande hecha hasta ahora tenía unos 2,5 metros de ancho.
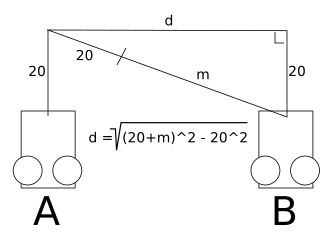
La configuración se realiza navegando por el trazador con el control remoto. Primera posición de marcado A y luego pasar a la posición B y marcar eso. Pongo marcadores de 20 cm en el hilo de coser izquierdo y derecho para no necesitar ninguna medida manual. La distancia m se da simplemente contando los pasos en el paso a paso de la izquierda mientras se mueve desde A a B . Una vez que el trazador sepa d y que su ubicación actual es B puede moverse y trazar donde quiera en el espacio entre y debajo de los puntos de anclaje.
Trazador número tres (el naranja en el video a continuación) es muy similar a su predecesor, solo algunos cambios:
- Toda la electrónica construida como un escudo para Arduino.
- Vigilante del nivel de batería, que permite "pausar - cambiar batería - reanudar".
Todo esto fueron buenas intenciones, pero. Poner IC:s de controladores paso a paso directamente en el escudo, omitiendo los controladores enviados con los controladores paso a paso, significó que no más leds parpadeantes. Es triste verlo. Súper aburrida. Además, el led integrado del Arduino está oculto detrás del escudo, ocultando los prácticos parpadeos que se obtienen cuando el receptor de infrarrojos está recibiendo, lo que hace que no esté seguro de si presionó el botón de calibración o no. La medición del nivel de la batería parecía una buena idea, pero en realidad siempre recurrí a realizar trazados de larga duración con energía cableada de todos modos.
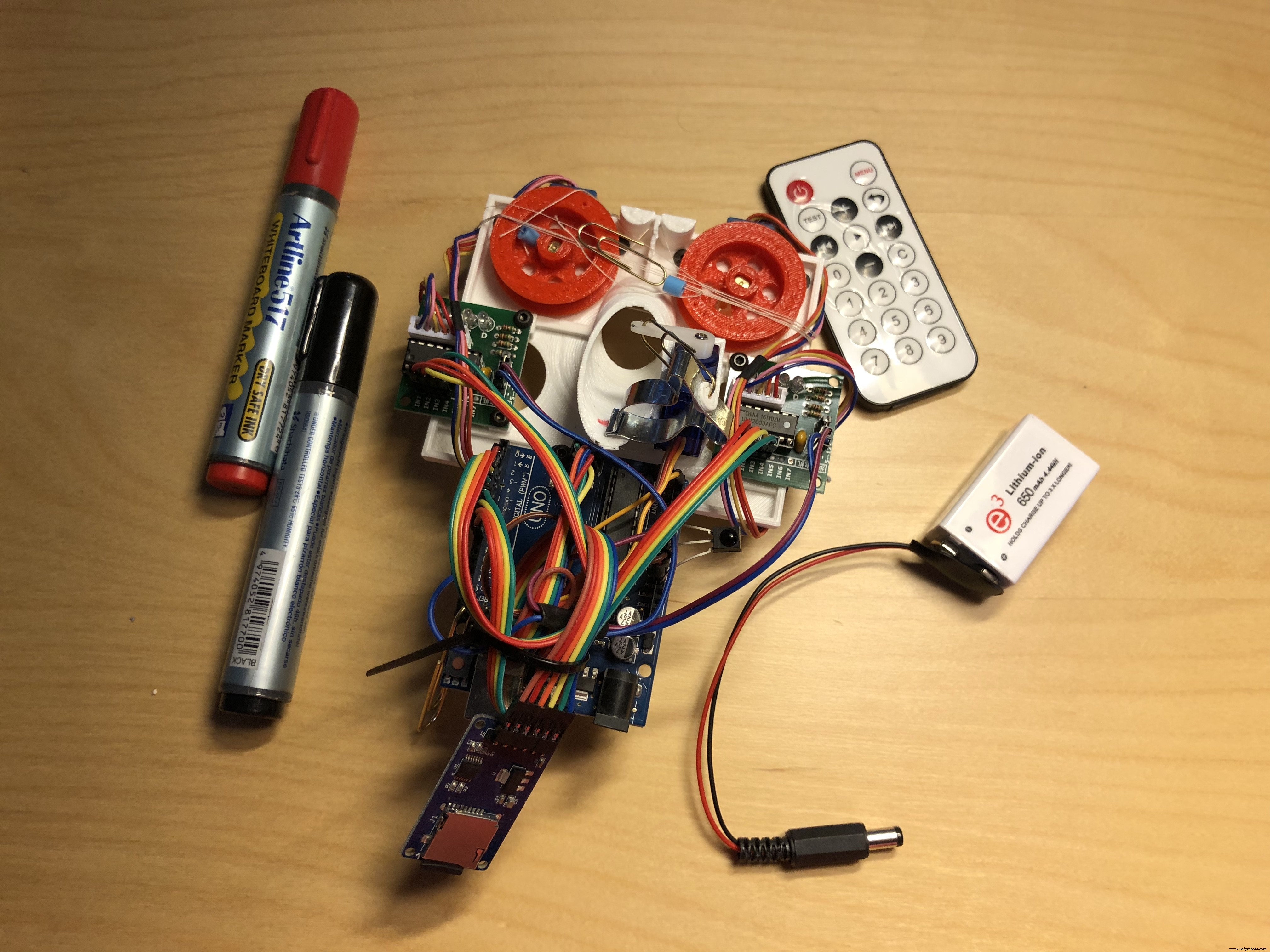
Trazador número cuatro (¡El fabuloso!) Fue construido como regalo de cumpleaños para mi hermano. Es, con mucho, el más atractivo construido con electrónica de estilo escudo pero dejando los controladores parpadeantes visibles en todo su esplendor. ¡Tenga en cuenta que los cables se dejan innecesariamente largos solo por su apariencia!
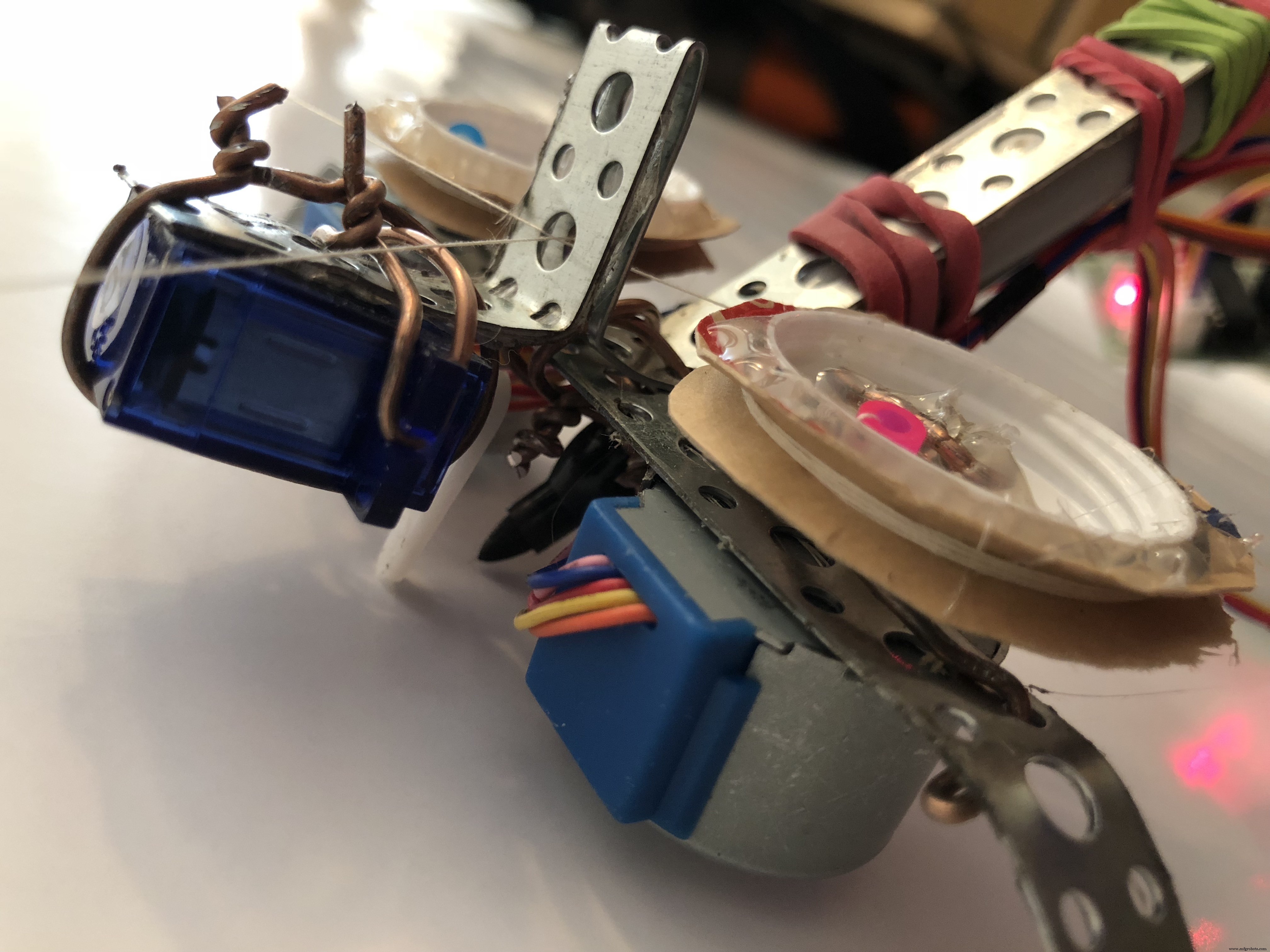
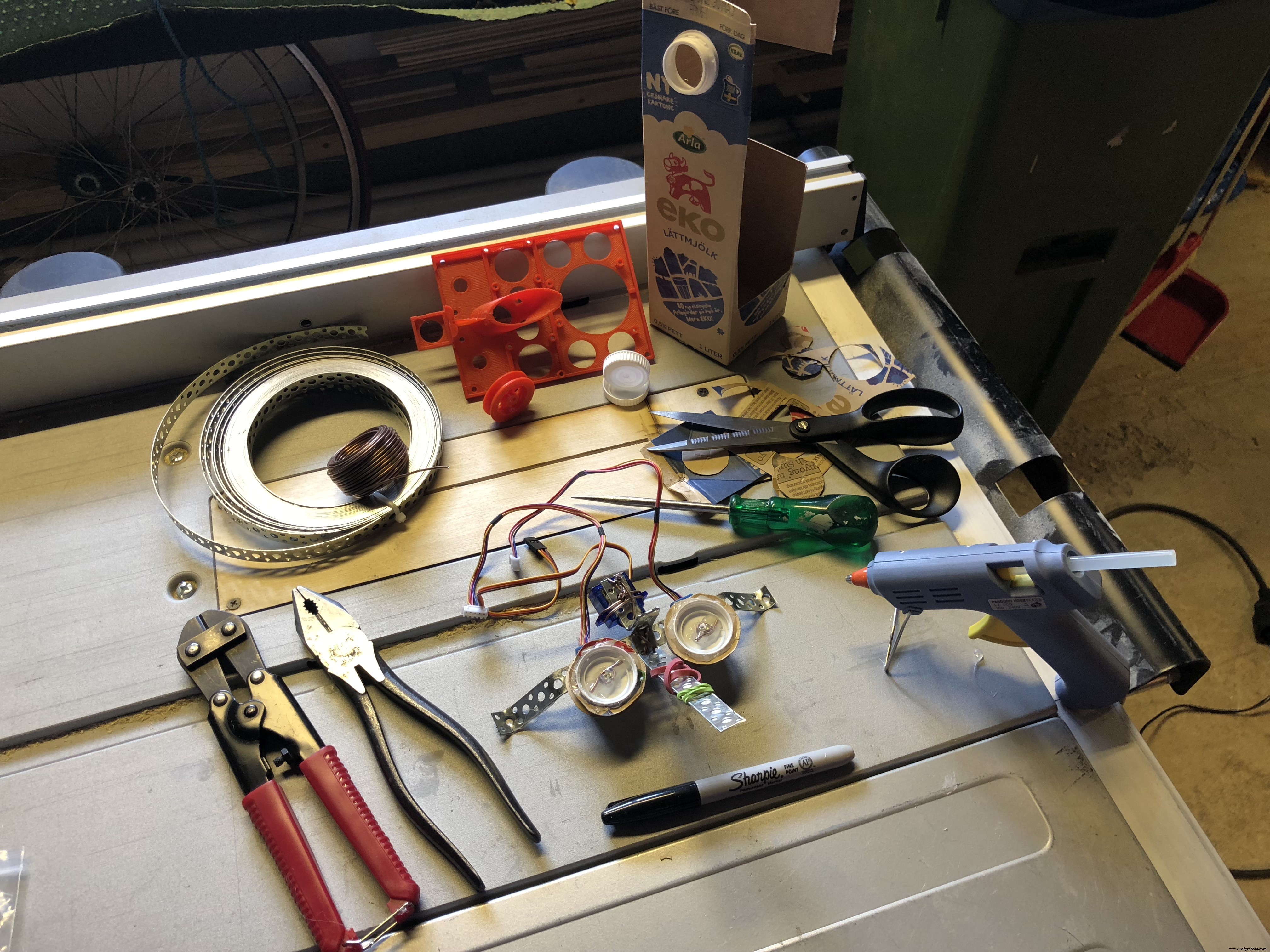
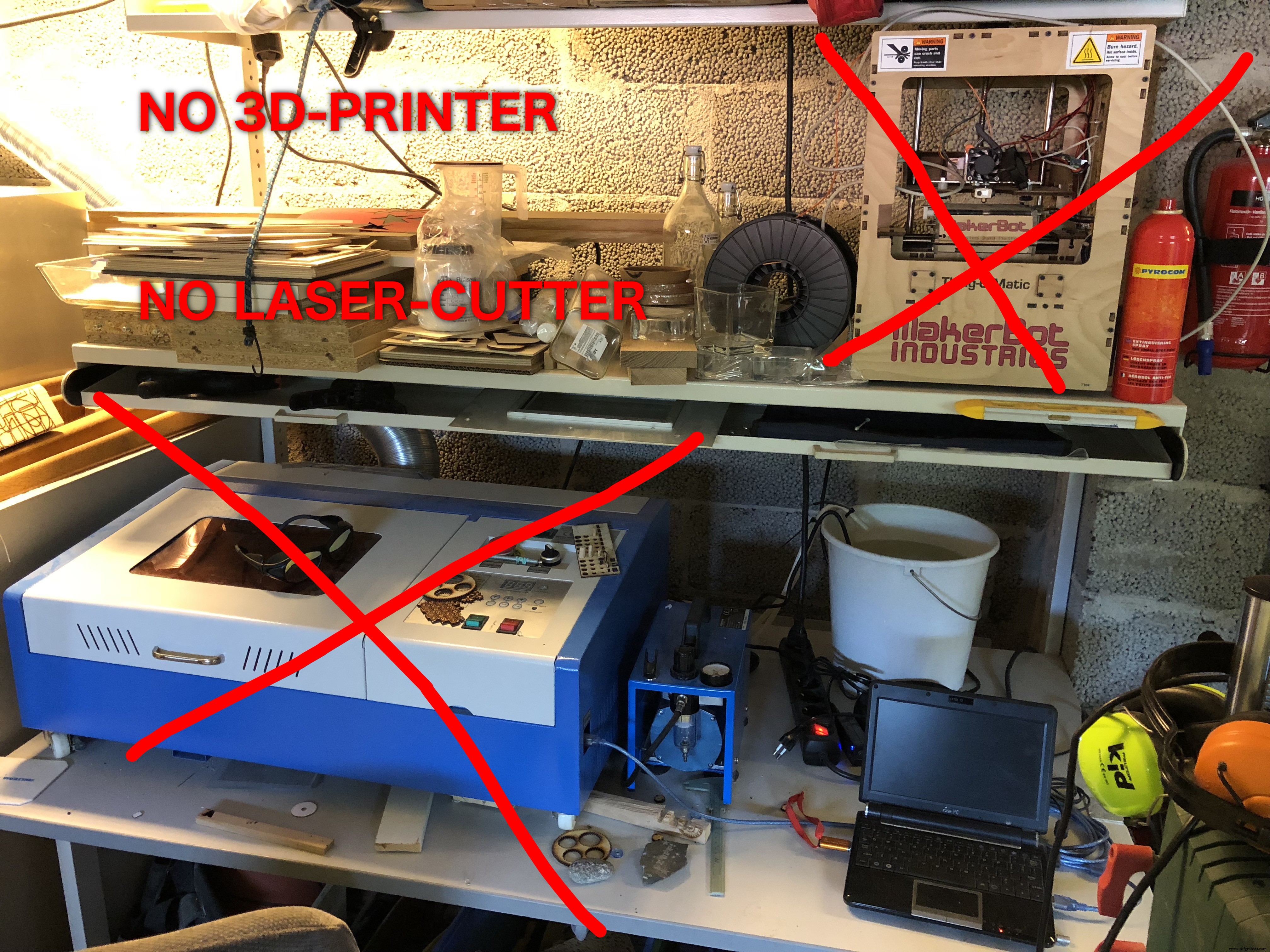
Trazador número cinco (Edición MacGyver) en realidad se construyó solo como una prueba de concepto para la descripción de este proyecto. Quería demostrar que se puede construir un trazador como este sin herramientas sofisticadas. Me senté en mi garaje y miré a mi alrededor para ver con qué podría construirlo. El alambre de amarre (alambre de metal blando que se usa para conectar barras de refuerzo) fue mi primera opción obvia. Al buscarlo encontré un rollo de cinta para conductos y pensé que eso me ahorraría tiempo y me daría más estabilidad. Las bridas y la cinta adhesiva también estaban en mi lista, pero no eran necesarias. Lo único que no pude entender fue cómo hacer buenos carretes sin demasiado trabajo. Volví a la casa a tomar un café y ahí estaba, ¡la tapa de un recipiente de leche! Honestamente, tomó menos tiempo construir el marco para el plotter cinco que el tiempo que lleva imprimir en 3D el diseño original. Y funciona tan bien (casi al menos) como los otros que construí.

Trazador número seis
¿Esperar lo? De alguna manera se me ocurrió construir otro. No pude evitarlo. Algunas cosas que me habían molestado necesitaban ser resueltas. También mejoras gracias a algunos comentarios aquí.
- El tamaño de impresión 3D del trazador era demasiado grande y lento.
- Parecía que al menos valía la pena intentar mover la pluma en lugar de todo el trazador.
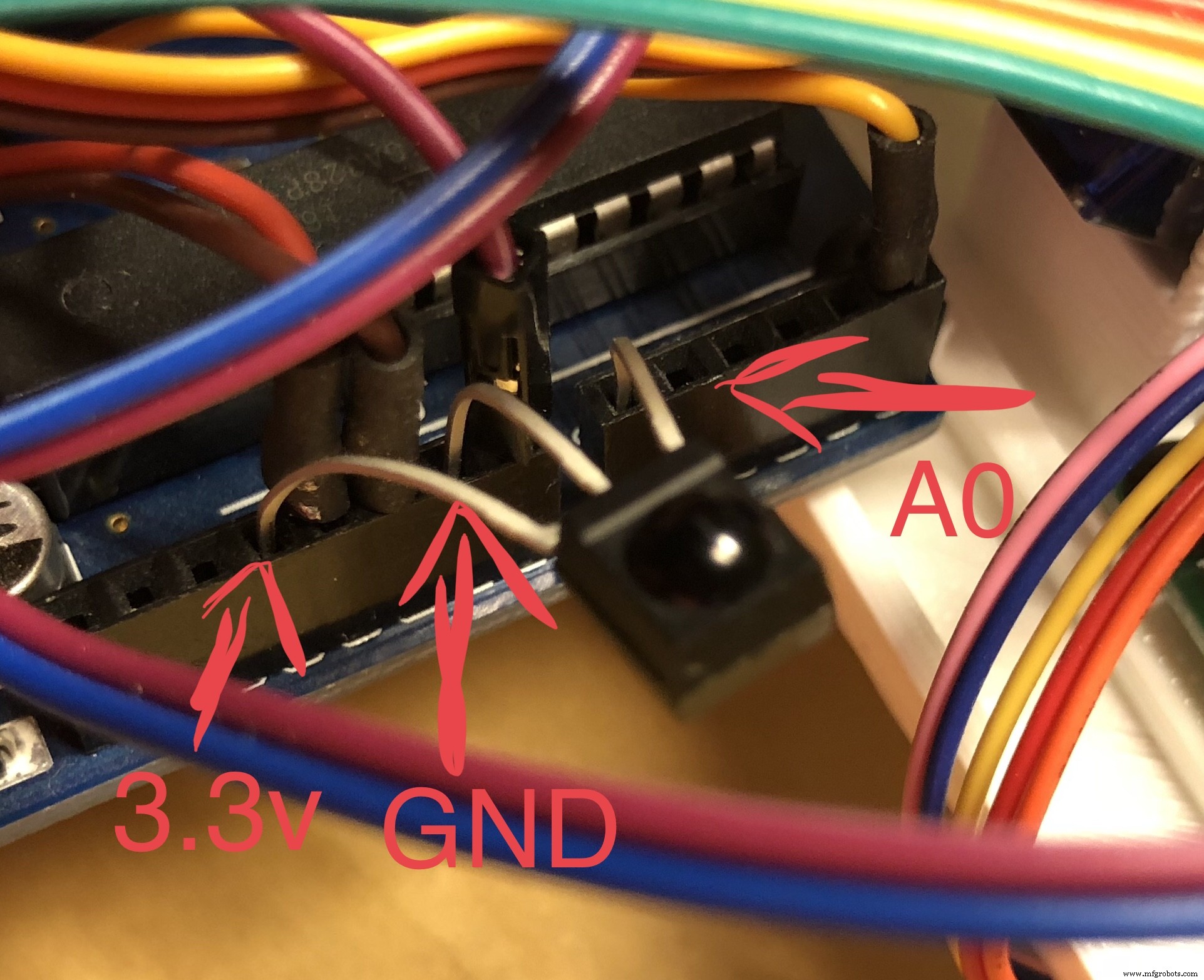
- ¡Mover el servo y el receptor de infrarrojos a los pines "analógicos" permitiría la depuración en serie! (¡Gracias jrcTexas por señalar que podría!)
Entonces, aquí está el resultado:


Entonces, ¿qué tan bien funciona esto nuevo? Bueno y malo. Los cambios se sienten bien en general, pero hay un problema. Dado que el bolígrafo no está fijado al marco, se mueve un poco al trazar. Esto hace que la precisión sea peor que la de la generación anterior. El gran beneficio es borrar los pines de E / S digitales 0-1 para que puedan usarse para depurar. ¡Esto hace la vida mucho más fácil!
También comencé a hacer algunas pruebas de estrés en los steppers para descubrir cómo no perderme los pasos:
Lo que se dedujo de las pruebas de esfuerzo fue que necesitaba reducir un poco la velocidad para tener suficiente torque. También calculé el tirón real de las cuerdas dependiendo de dónde esté el trazador en la pared:
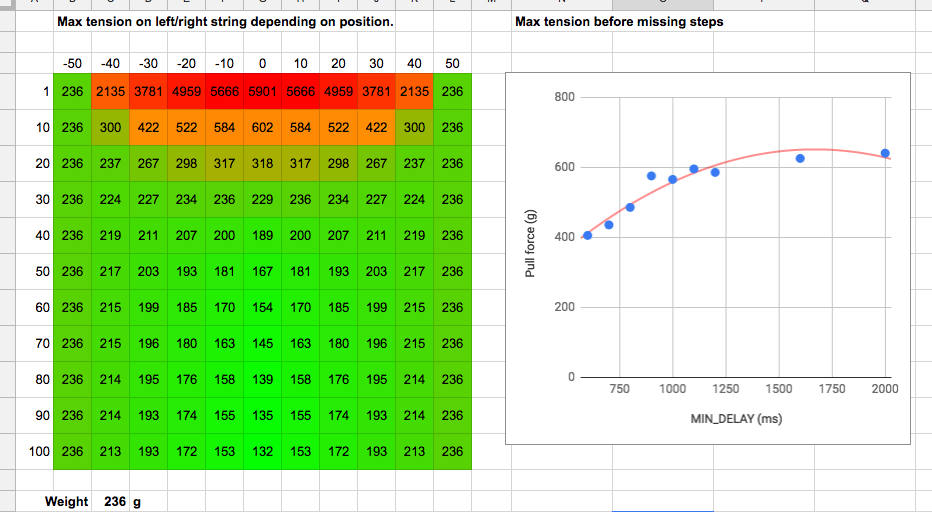
Podría hacer un seguimiento de las pruebas de esfuerzo para descubrir cómo se reproducen también las diferentes secuencias de pasos y el voltaje. Algún día.
Uso del trazador
Hago un video que muestra cómo funciona la configuración y el trazado en la vida real y en tiempo real.
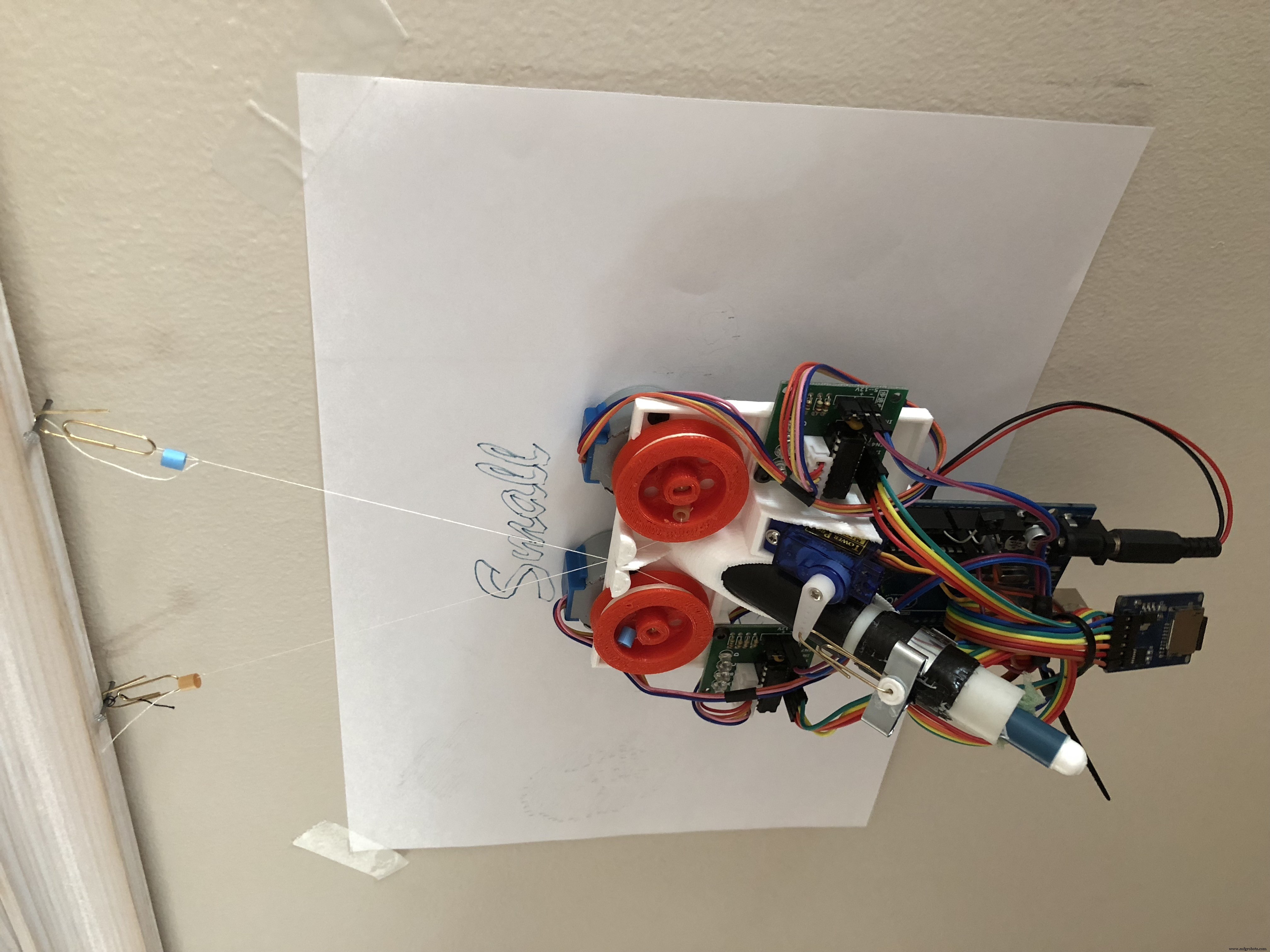
Como se puede ver en el video, la configuración es bastante sencilla y lleva poco tiempo. La configuración típica del desafío es encontrar buenos puntos de anclaje. Para las pizarras, he usado principalmente ventosas pequeñas a las que pegué un bucle de hilo de coser o similar para luego colgar el plotter con un clip. Un aspecto importante del punto de anclaje es colocar el hilo lo más cerca posible de la pared, para obtener una mejor presión del bolígrafo contra la pared.
Otra advertencia es trazar en parcelas amplias. Cuando se requiere más torque para tirar del hilo, los steppers comenzarán a perder pasos, lo que hará que el trazador pierda la pista de su ubicación exacta, ya que no hay codificadores que ayuden. Así que el consejo general es:colgar alto, imprimir bajo.






Hardware del trazador
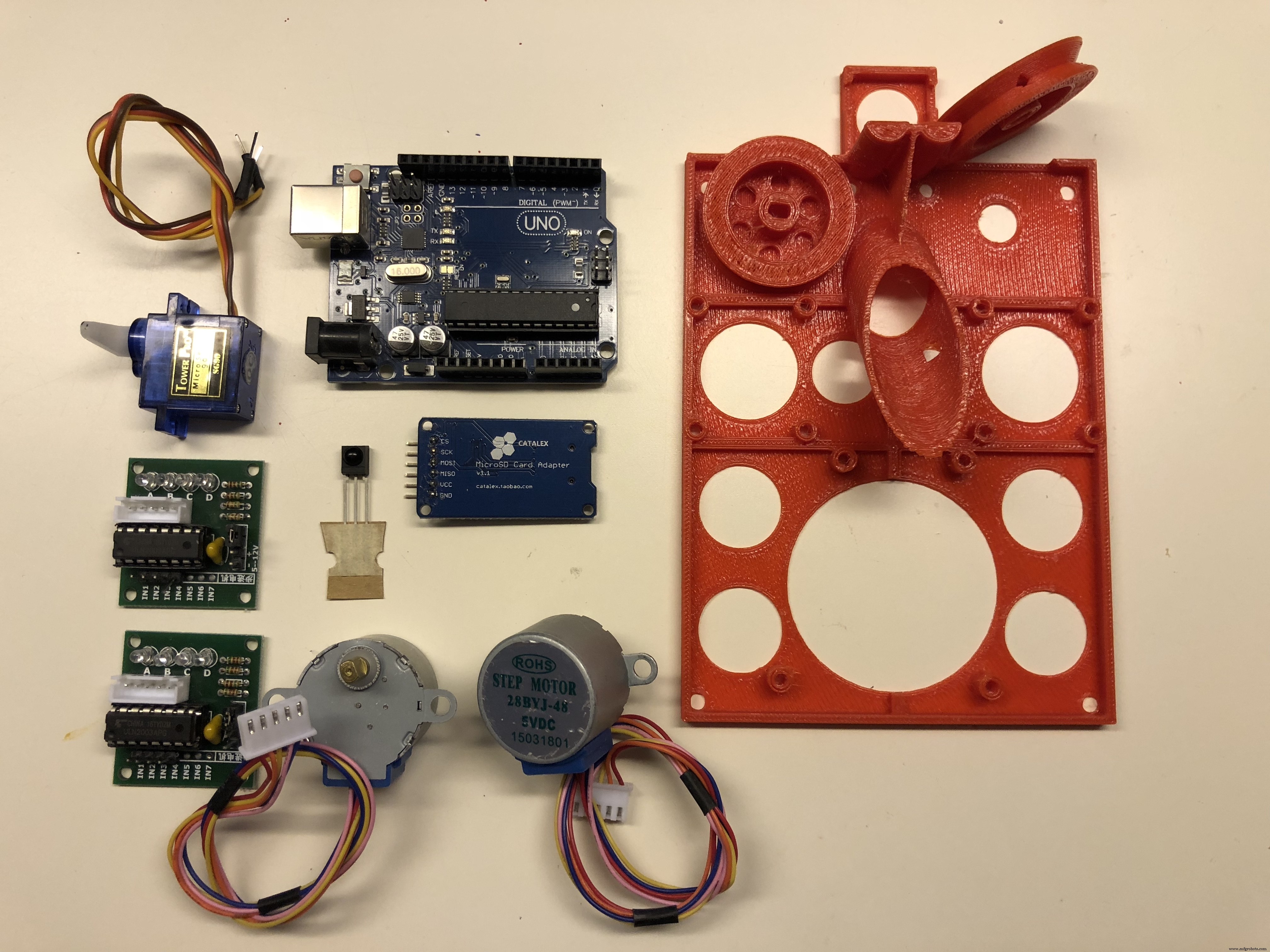
Construir el trazador es bastante sencillo y se parece mucho a la mayoría de los otros proyectos de Arduino. Tienes un Arduino Uno, algunos componentes que quieres que use y un montón de cables para conectarlo todo.
Como se puede ver en los esquemas, usará casi todos los pines digitales y luego posiblemente algunos analógicos si, por ejemplo. desea controlar los niveles de la batería. Una advertencia con esto es que terminará usando el pin 0-1 que también funciona como TX / RX. Para evitar freír cosas necesitarás desconectar todo lo que hayas conectado allí cuando programes el Arduino! Esta es la razón por la que construí mis trazadores más recientes con todos los componentes electrónicos en un escudo que simplemente podía separar al programar.
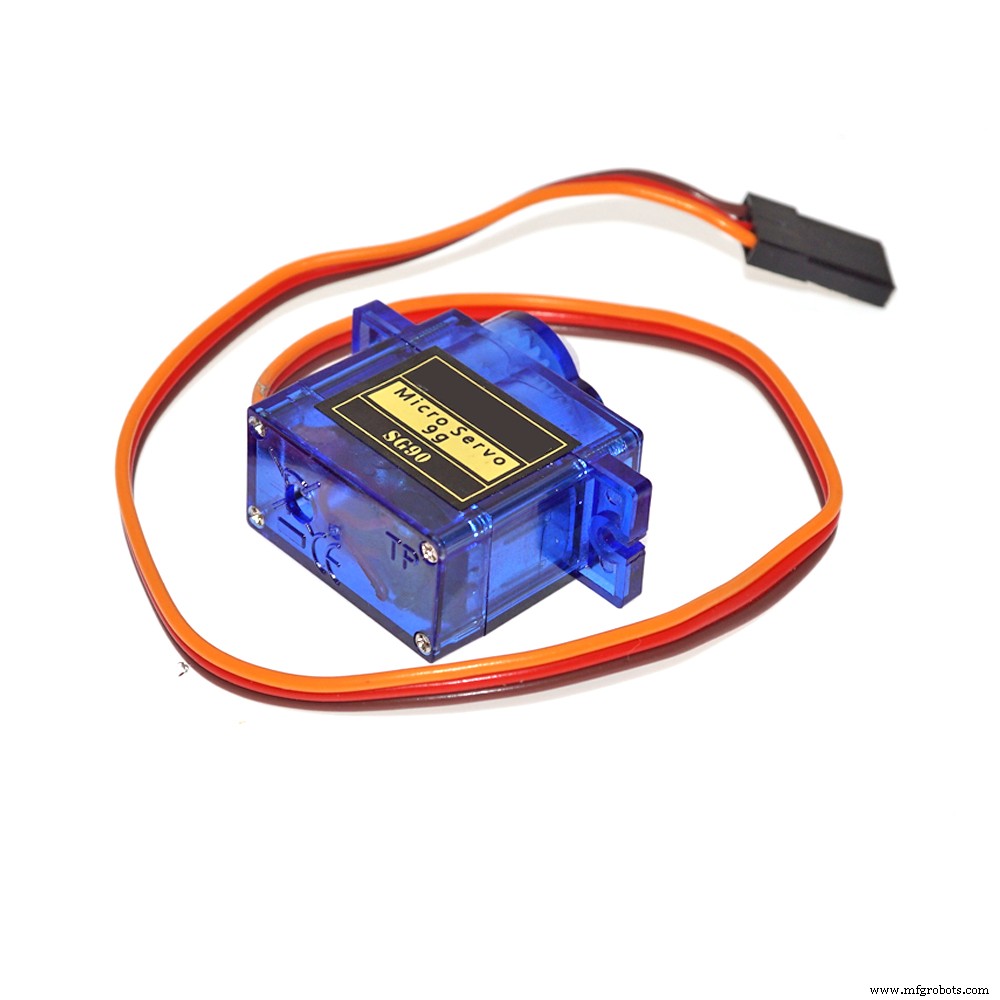
El servo RC podría ser prácticamente cualquier servo de cualquier dimensión. Solo tendrá que ser creativo y montarlo de manera que pueda alejar (o no) el trazador de la pared.
Los motores paso a paso y los controladores podrían potencialmente cambiarse a algún otro tipo, pero los pequeños 28BYJ-48 son muy convenientes. Sin embargo, no son tan poderosos y me encantaría construir un trazador que sea mucho más rápido algún día. Los motores tienen una potencia de 5 V, pero felizmente he ignorado esto y les proporcioné todo entre 5-9 V sin problema. Se ponen calientes, pero todavía no he frito.
El módulo de tarjeta micro-sd es sencillo de conectar al Arduino, ya sea a través de los pines de la interfaz SPI o los pines digitales 10-13.
El receptor de infrarrojos TSOP 4838 también se reproduce muy bien conectado directamente al Arduino.
Mi tercer y cuarto trazador tenían un controlador de nivel de batería mediante un divisor de voltaje de resistencia agregado a una entrada analógica. También pensé que iba a tener un control de temperatura de los steppers agregado de manera similar. Mi consejo, simplemente sáltelo.
Recomiendo encarecidamente que cree y pruebe una cosa a la vez. No monte todo, ponga sus gráficos en la SD y espere trazar de inmediato. Recomendaría hacer lo siguiente:
- Comience probando el receptor de infrarrojos. Utilice el ejemplo de IRRecvDump que viene con la biblioteca IRRemote. Necesitará esto para registrar los códigos de sus llaves remotas de todos modos.
- Pruebe su servo. Por ejemplo, use el ejemplo de barrido de la biblioteca Servo.
- Pruebe su tarjeta SD. Juega con los ejemplos de la biblioteca SD.
- Pruebe el control de los steppers. Juega con las muestras de la biblioteca Stepper.
- Cuando se sienta cómodo con las partes anteriores, actualice el programa del trazador en el Arduino y luego conecte todos los componentes. (no montes y hagas nada bonito todavía)
- Encienda el Arduino y vea qué sucede. Si todo funciona, el servo debería hacer un pequeño barrido justo después del encendido.
- Intente controlar los steppers desde el control remoto. asegúrese de averiguar qué paso a paso está a la izquierda y cuál a la derecha. Asegúrese de tenerlos conectados para que el botón "REEL_IN" realmente tire de la cuerda y no al revés. Le doy un 50% de probabilidad de que necesite cambiar el orden de los pines en el software o en el hardware. (No vale la pena molestarse demasiado, es muy fácil simplemente darle la vuelta a los conectores. ¡Confíe, pero verifique!
- Cuando esté seguro de que todo lo anterior funciona, estará listo para ensamblar todo en forma de trazador y probarlo colgando de una pared.
No daré instrucciones súper detalladas sobre el montaje de piezas aquí. Es mejor que explore su hardware y encuentre soluciones que funcionen para usted. Inspírate con el trazador "MacGyver" de arriba, mantenlo simple. Siempre puedes ir elegante y perfecto más tarde. A continuación se muestra un video muy poco coherente de mí hablando sobre algunas cosas del hardware. También necesitará familiarizarse con el software y crear un archivo para graficar, ver más abajo.
Software de trazador
Todo el software está disponible aquí en GitHub. Pido disculpas por el estado del código, es realmente un truco. Tal vez me tome mi tiempo y lo limpie, pero es muy probable que lo mires antes de que eso suceda. Lo siento.
El software del trazador hace dos cosas:
- Permitir la navegación y la configuración desde el control remoto
- Dibuja el contenido de un archivo .svg almacenado en la tarjeta SD.
Como la memoria del programa en Arduino Uno es bastante limitada, se han tomado muchos atajos feos para encajar el código en la memoria. Esto fue particularmente cierto para el primer trazador que carecía de la tarjeta SD y los gráficos también debían programarse directamente en el Arduino. El análisis de .svg es extremadamente limitado y solo puede manejar rutas con líneas (sin curvas) y requiere que sea un dialecto específico de.svg que he usado INKSCAPE para generar.
Los archivos .svg se almacenan en la carpeta de nivel superior de la tarjeta SD como 1.svg, 2.svg, etc. El archivo a dibujar se selecciona presionando el botón correspondiente en el control remoto. Esto me permite tener el plotter preparado con algunos favoritos con los que puedo enriquecer rápidamente las pizarras blancas de las personas.
El IDE de Arduino se ha utilizado para construir y programar el controlador. La única biblioteca adicional utilizada es IRRemote (por shirriff).
Creación de un archivo trazable
Probablemente hay cientos de formas de crear un archivo .svg que se trazará, pero solo describiré una aquí:
- Utilice INKSCAPE
- Dibuja lo que quieras y conviértelo en rutas "Ruta-> Objeto a ruta"
- Elija "Editar rutas por nodos (F2)"
- Seleccione todas las rutas y nodos individuales. Ctrl-A dos veces
- Convierta a líneas mediante "Extensiones-> Modificar ruta-> Aplanar Béziers"
- Guardar como "Inkscape SVG"
- Ejecutar en el simulador, ver más abajo
El simulador
¡Una cosa más! Hay un simulador. Es más o menos obligatorio ejecutar cualquier gráfico que desee hacer a través del simulador antes de intentar imprimirlo. Esto es principalmente necesario ya que el análisis .svg es tan malo que hay muchas posibilidades de que el trazador no interprete correctamente algo.
El simulador funciona compilando el código del trazador para osx o linux y reemplazando las llamadas "digitalWrite" con impresiones a stdout (marca de tiempo, pin, estado) que luego se canaliza a una interfaz de usuario de visualización.
El simulador se escribió después de que tuve un error que provocó que una impresión de 2 horas se estropeara miserablemente después del 95% más o menos. Estaba completamente perdido en cuanto a lo que había sucedido y me di cuenta de que necesitaba alguna forma de depurarlo. Resultó ser un error de análisis flotante causado por un número en el.svg que tiene cantidades ridículas de decimales. (Hice mi propio análisis ya que las funciones de la biblioteca no cabían en la memoria). Fue un gran error porque me obligó a hacer el simulador.
Usar el simulador durante el desarrollo puede ayudar mucho. Se puede ejecutar mucho, mucho más rápido que en tiempo real, lo cual es muy conveniente. También muestra cuánto tiempo tomará realmente el gráfico cuando se ejecute en tiempo real. Hay un archivo Léame junto al código del simulador sobre cómo usarlo.
Mejoras futuras
Aquí hay una lista que tengo en mente sobre lo que podría mejorarse:
- Deje de parsing.svg en el trazador, tenga un analizador real en la computadora y cree un buen formato para el trazador.
- Mejor ruptura, el software actual solo lee un segmento de línea por delante, lo que a veces es demasiado pequeño si un ligero giro se convierte en uno brusco.
- Codificadores o algún tipo de retroalimentación para evitar perderse al perder pasos ..
- Escriba un software limpio adecuado.
- Use un controlador habilitado para WiFi y use el teléfono en lugar del control remoto.
Algunas palabras finales
Como probablemente ya comprenderá, pasé bastante tiempo con este proyecto, sobre todo hace mucho tiempo. Sigo pensando que es divertido jugar con él y tengo toneladas de ideas sobre qué mejorar, nuevas variaciones y nuevas paredes para decorar. Sin embargo, simplemente no tengo tiempo, hay muchos otros proyectos y cosas como la familia y el trabajo.
Lo que realmente me encantaría es que algunas de ustedes, buenas personas en Internet, obtengan algo de leer esto y se inspiren para sus propios proyectos. ¡También sería feliz si algunos de ustedes construyeran sus propios trazadores y los hicieran funcionar!
Aunque creo que logré construir un plotter minimalista, no logré que el costo sea inferior a $ 10 como me había fijado como objetivo. Pero a medida que las piezas se vuelven más baratas, probablemente estará allí en un año más o menos ...
Oh, una cosa más. Por favor, no me mates por el código espagueti. Nunca fue escrito para ser compartido, estaba ocupado dibujando en la pared en ese momento y no podía importarme menos el código. Decidí compartirlo de todos modos, así que alégrate por eso.
Buen viaje,
Fredrik
Código
Estricto
Código, documentación y dibujos CAD para el plotter de pared Stringent.https://github.com/snebragd/stringentPiezas y carcasas personalizadas
subió un nuevo stl para la base, el anterior se rompió de alguna manera. Nueva base para el trazador. Huella más pequeña -> menos para imprimir. La acción del servo ahora consiste en mover la pluma en lugar de empujar el trazador lejos de la pared.Esquemas
Esquema electrónico simple
Proceso de manufactura
- El esfuerzo de múltiples habilidades para el mantenimiento
- El control de calidad es el primer paso para la confiabilidad del motor
- La importancia de las tendencias en la confiabilidad de los motores eléctricos
- Supervisión del estado de la maquinaria de la planta
- Devanados de motor:¿cuáles son las diferencias?
- La guía completa para elegir un motor a prueba de explosiones
- La guía completa para el almacenamiento adecuado de motores eléctricos
- Motor de CC frente a motor de CA:¿cuál es la diferencia?
- Motor CA vs. CC:¿Cuál es la diferencia entre ellos?
- Cómo elegir el reductor adecuado
- Qué determina la velocidad de un motor hidráulico