


Robot controlado por gestos manuales
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
ACTUALIZACIÓN:LA VERSIÓN ACTUALIZADA DE ESTE PROYECTO SE PUEDE ENCONTRAR AQUÍ
Introducción
¡Ojalá pudiera controlar todo con mis manos! Sentado en mi silla y controlando las cosas como un JEFE. ¡Me encantaría! Así que finalmente obtuve un robot de reconocimiento de gestos de mano de bricolaje genial, que puede seguir los comandos realizados mediante gestos con las manos. Suena loco, pero te prometo que es muy sencillo. Hacer un robot de control por gestos es realmente muy simple. Este robot es una mejora de mi otro auto RC de proyecto de bricolaje que usa un módulo de RF.
Aquí también, el robot se divide en dos partes, transmisor y receptor. El circuito del receptor es el mismo que el del poste anterior y solo hay un ligero cambio en el circuito del transmisor, aquí necesitamos programar el circuito del transmisor. Entonces usaré un Arduino como plataforma de programación. Para reconocer los gestos realizados, utilizaré un sensor de acelerómetro. ¡Así que empecemos a construir!
Mira el robot en acción
¿Qué es eso y cómo funciona?
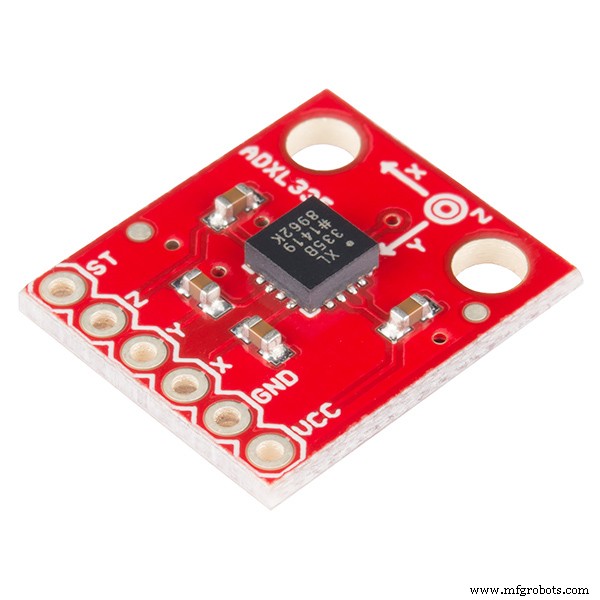
¿Qué es un acelerómetro (ADXL335)?
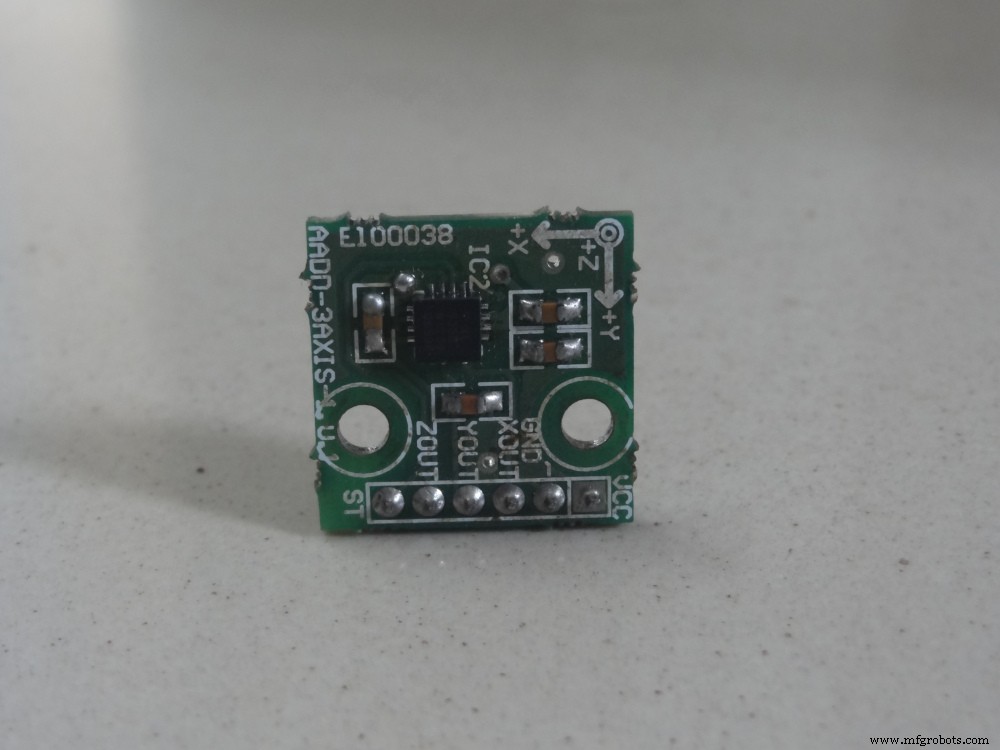
En resumen, un acelerómetro es un dispositivo de medición de aceleración de tres ejes. El acelerómetro utilizado aquí es ADXL335 y tiene 3 ejes (X Y Z).
Casi todos los smartphones ahora tienen acelerómetros (aunque no lo vamos a sacar de un smartphone). Definitivamente jugaste juegos de movimiento en tu móvil (por ejemplo, Temple Run) donde el personaje en el juego se mueve hacia la izquierda y hacia la derecha cuando inclinas tu teléfono hacia la izquierda y hacia la derecha, respectivamente, lo hace el acelerómetro.
Hay otro sensor llamado Giroscopio que se encuentra en el teléfono inteligente que no necesitamos ahora.
¿Cómo funciona y reconoce los gestos?
Aquí el cerebro del robot es Arduino Uno (Atmega32) y se alimenta con algún conjunto de código. Los gestos / movimientos hechos a mano son reconocidos por un dispositivo de medición de la aceleración llamado acelerómetro (ADXL335).
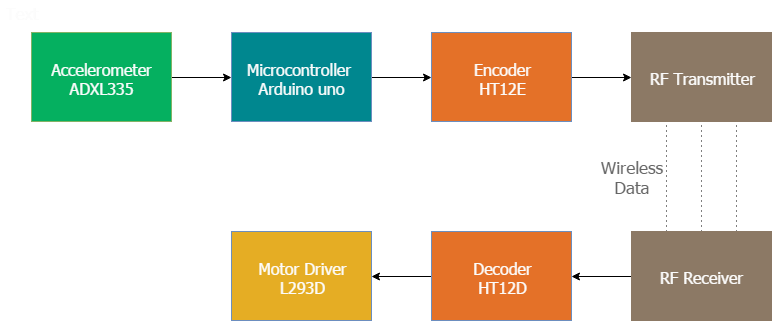
Aquí el acelerómetro lee las coordenadas X Y Z cuando hacemos gestos con la mano y enviamos las coordenadas X Y Z al Arduino (aquí no necesitamos el eje Z, solo necesitamos dos X e Y coordinados, así que descuide la coordenada Z). El Arduino verifica los valores de las coordenadas y envía un código de 4 bits al Encoder IC. El codificador pasa los datos al transmisor y el receptor de RF recibe los datos transmitidos. El receptor envía el código de 4 bits al Decoder IC y el decodificador lo pasa al Motor Driver IC. Más tarde, el conductor del motor toma la decisión de girar los dos motores en la dirección requerida.
Haz la fuente de alimentación
Primero, comenzaremos con el circuito de suministro de energía. Necesitamos dos circuitos de alimentación:uno para el transmisor y otro para el receptor. El circuito del receptor debe alimentarse con un suministro de 12 V (ya que estoy usando un motor de 12 V) y el circuito del transmisor se puede alimentar con una batería de 9 V.
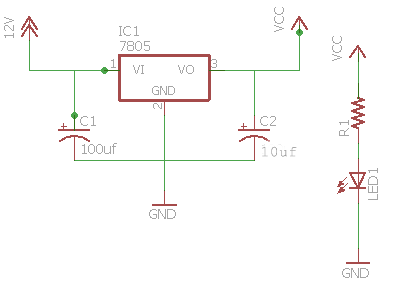
Puede ver el circuito de la fuente de alimentación del receptor a la derecha. Usando este diagrama, conecte el circuito de suministro. También puede agregar un LED a través de una resistencia de 1k para indicar el estado de la fuente de alimentación.
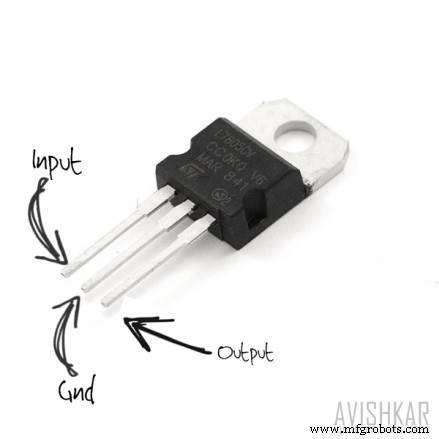
- IC 7805 que regula el suministro de 12 V a 5 V (si no puede obtener un suministro de 12 V, puede usar un suministro de 9 V)
- Condensador de 0,1 uf y 470 uf
- Resistencia de 1k para el LED de estado
NOTA: Use el disipador de calor para 7805 porque estamos bajando 7V (12-5), por lo que se producirá mucho calor para quemar el regulador, por lo que se recomienda el uso de un disipador de calor.
Comencemos a hacer el transmisor (remoto)
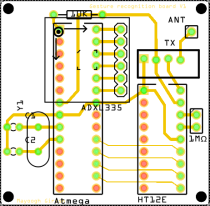
La sección del transmisor consta de un acelerómetro que detecta el gesto de la mano y envía los datos al Arduino. Posteriormente, Arduino envía datos al Encoder IC de acuerdo con los datos recibidos del acelerómetro y los datos se transmiten al receptor. Realice el cableado según el circuito siguiente:
NOTA: Tenga en cuenta que algunos acelerómetros utilizan una fuente de alimentación de 3,3 V y pueden dañarse con 5 V. Consulte la documentación del proveedor para averiguar cuál es el voltaje correcto.
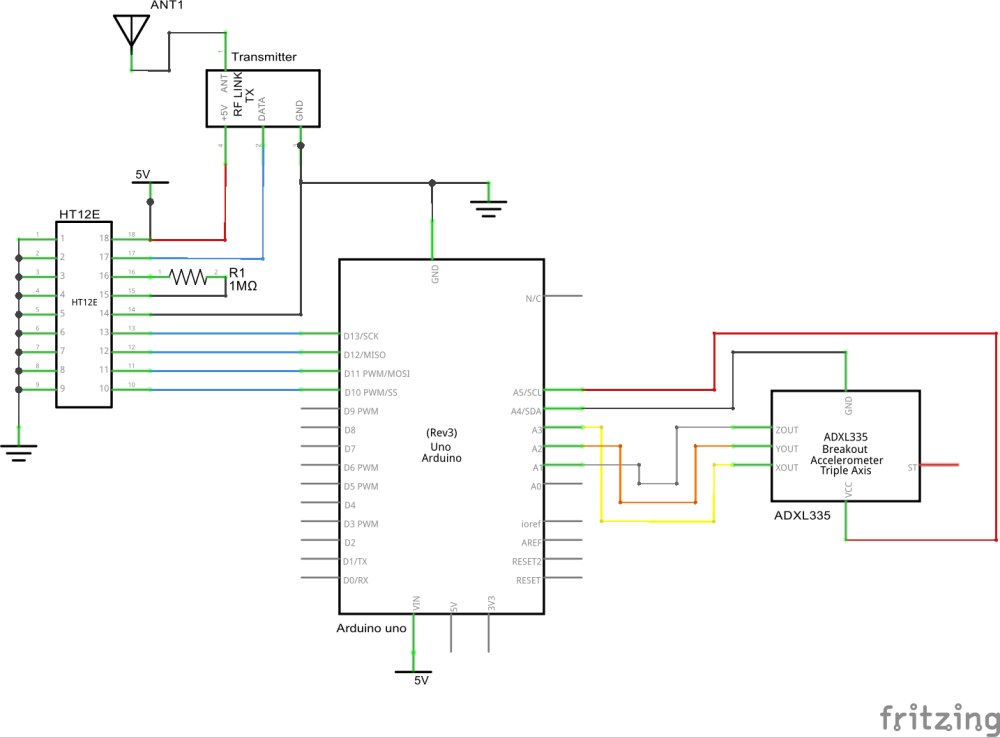
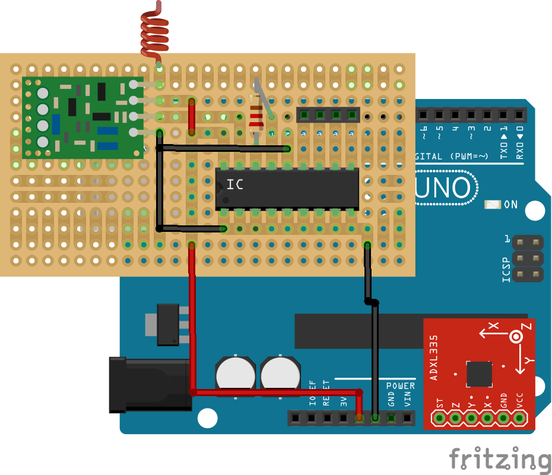
Esta es solo una ilustración del transmisor:
Subir código a Arduino
Aquí está el código actualizado
Haz el receptor
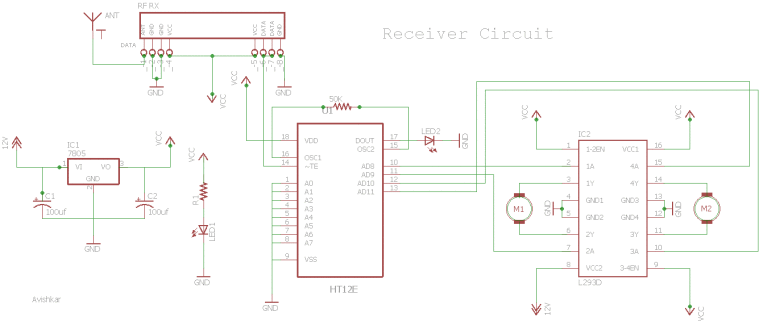
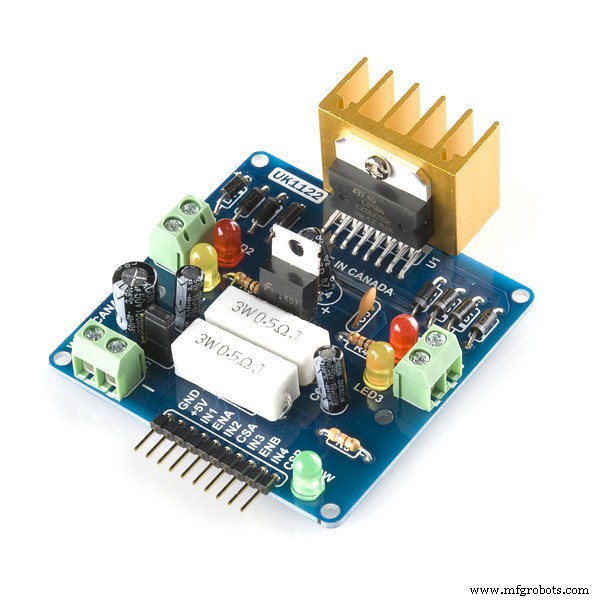
El circuito del receptor consta de 2 IC (decodificador HT12D, controlador de motor L293D), módulo receptor de RF.
Conecte el circuito según el esquema del receptor anterior. Hay 2 LED en la placa del receptor, uno se enciende cuando se le da alimentación al receptor y el otro cuando se le da alimentación al circuito del transmisor. El LED cerca del IC HT12D debe iluminarse y esto le proporciona una transmisión válida (VT) cuando se da energía al transmisor si no hay algún problema con su conexión o su módulo RF-TX-RX.
Si desea conocer más en detalle sobre la sección del receptor, lea este artículo.
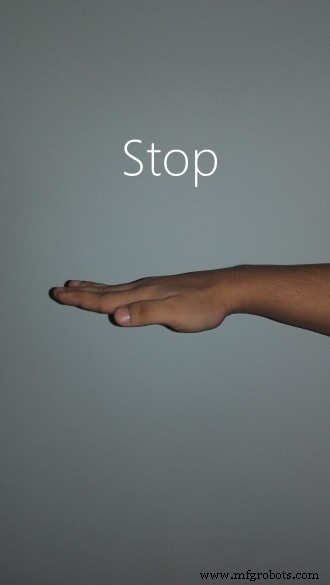
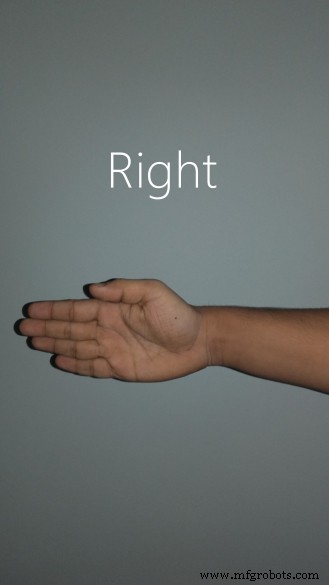
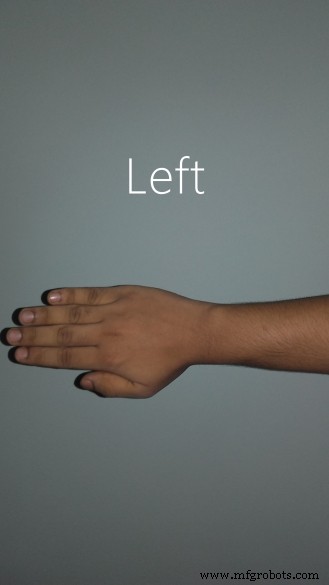
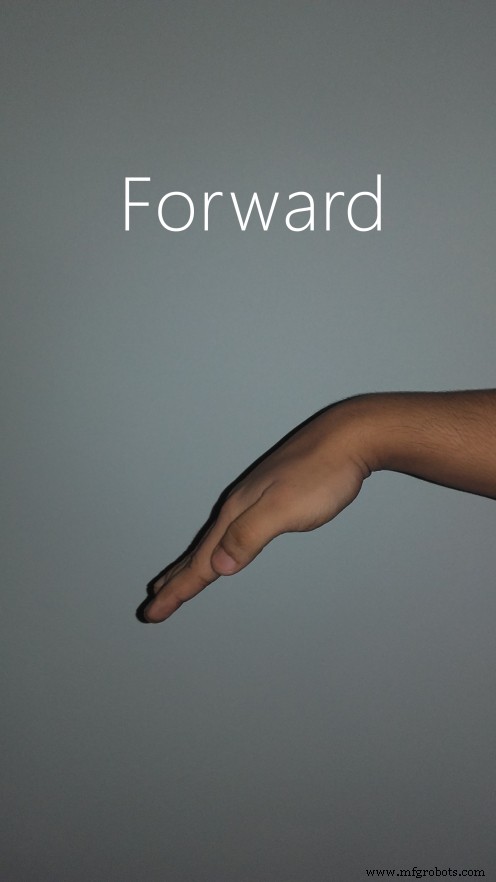
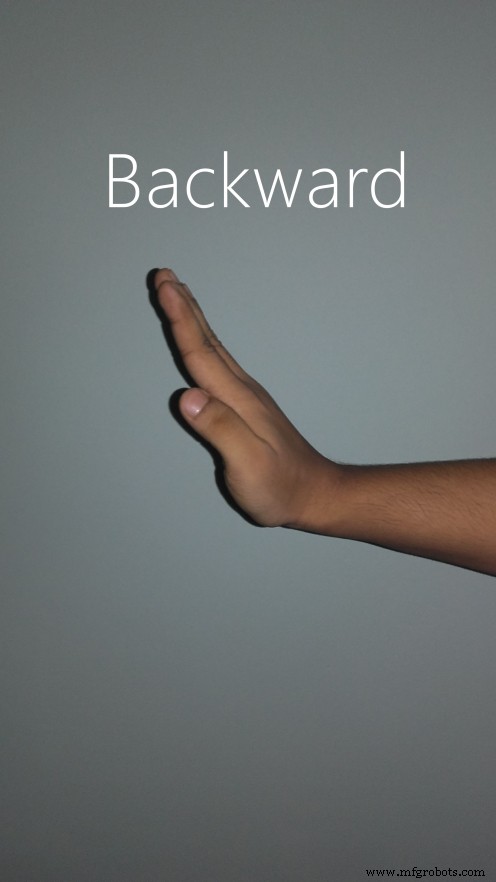
¿Qué gestos reconocerá el robot?
Este robot está diseñado para reconocer cinco conjuntos de gestos:adelante, atrás, izquierda, derecha y parada. Obtendrá una mejor idea si comprueba las fotos de los gestos que se muestran a continuación.
Disfrutando conduciendo su robot.
Reducirlo y hacerlo permanente.
Arduino Uno será grande y voluminoso en tu mano. Y si está decidiendo hacer otro proyecto usando Arduino, deberá eliminar el Arduino y todas las conexiones realizadas en él, y perderá su trabajo anterior. No me gusta hacer eso, así que encontré una solución para que sea permanente. Puede consultar este artículo para aprender cómo reducir su proyecto Arduino.
Descargue el diseño de PCB para la versión independiente desde aquí (espejo).
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdfMira este video en el que he transferido el código a Atmega8 MCU. Solo he mostrado las salidas de MCU usando LED.
Echa un vistazo a mi blog para ver mis nuevos proyectos
Si tienes alguna duda deja un comentario aquí. Es mi blog. Revisaré regularmente los comentarios allí en lugar de aquí.
Proceso de manufactura
- Robot Raspberry Pi controlado por Bluetooth
- Robot controlado por gestos con Raspberry Pi
- Windows 10 IoT Core:Robot controlado por voz
- Robot controlado por Wifi usando Raspberry Pi
- ROObockey:Robot de hockey callejero asistido por objetivo y controlado a distancia
- Luz de mesa interactiva controlada por gestos
- Controlador de juego Arduino
- Botella de agua con tecnología Arduino
- Robot controlado por voz
- Brazo robótico controlado a través de Ethernet
- Robots de guía manual