


Sonda Arduino
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 |
Acerca de este proyecto
Visualización de pantalla de radar para HC-SR04
Código Arduino:
Envía lecturas de sensor para cada grado movido por los valores de servo enviados al puerto serie para ser recogidos por Processing
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
Código de procesamiento:
Traza un área de lo que ve el HC-SR04 desde una vista de arriba hacia abajo. Toma y muestra 2 lecturas, una de izquierda a derecha y otra de derecha a izquierda. Muestra un promedio de las 2 lecturas
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
¡Cualquier pregunta es bienvenida!
Github:https://github.com/faweiz
Cartera:https://portfolium.com/faweiz
Linkedin:https://www.linkedin.com/in/faweiz
Código
- Archivo sin título
Archivo sin título Arduino
/*https://www.hackster.io/faweiz/arduino-radarRadar Screen Visualization for HC-SR04 Envía lecturas del sensor para cada grado movido por los servovalores enviados al puerto serie para ser recogidos por Processing * / # include#include #define TRIGGER_PIN 2 // Pin 2 de Arduino vinculado al pin de disparo en el sensor ultrasónico. # Define ECHO_PIN 3 // Pin 3 de Arduino vinculado al pin de eco en el sensor ultrasónico. # Define MAX_DISTANCE 150 // Distancia máxima para la que queremos hacer ping (en centímetros). La distancia máxima del sensor es de 400-500cm. # Define SERVO_PWM_PIN 9 // establece el servo en el pin 9 de Arduino // significa -angle .. angle # define ANGLE_BOUNDS 80 # define ANGLE_STEP 1 int angle =0; // dirección del movimiento del servo // -1 =atrás, 1 =adelante int dir =1; Servo myservo; Sonda NewPing (TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); configuración vacía () {Serial.begin (9600); // inicializar el puerto serie:myservo.attach (SERVO_PWM_PIN); // establece el servo en el pin 9 de Arduino} void loop () {delay (50); // debemos renormalizar a valores positivos, porque el ángulo es de -ANGLE_BOUNDS .. ANGLE_BOUNDS // y el valor del servo debe ser positivo myservo.write (angle + ANGLE_BOUNDS); // lee la distancia desde el sensor y la envía a la serie getDistanceAndSend2Serial (ángulo); // calcular el ángulo if (ángulo> =ANGLE_BOUNDS || angle <=-ANGLE_BOUNDS) {dir =-dir; } ángulo + =(dir * ANGLE_STEP); } int getDistanceAndSend2Serial (int ángulo) {int cm =sonar.ping_cm (); Serial.print (ángulo, DEC); Serial.print (","); Serial.println (cm, DEC); }
Código
https://github.com/faweiz/My-Arduino/tree/master/arduino_radarArduino_radar_server_arduino.ino
Arduino_radar_client_processing.pde
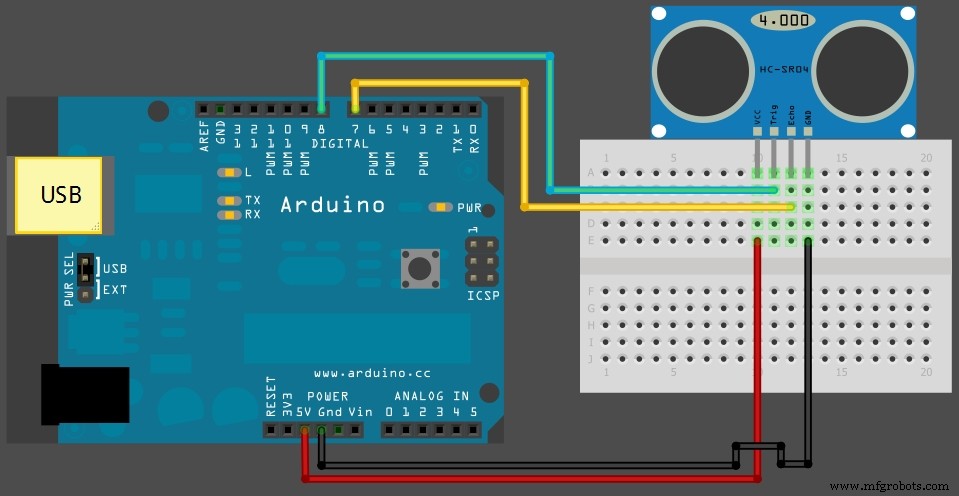
Esquemas
Proceso de manufactura