


Brazo robótico de materiales reciclados
Componentes y suministros
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Aplicaciones y servicios en línea
 |
| |||
 |
|
Acerca de este proyecto
Los brazos robóticos son uno de los proyectos de bricolaje más populares que encontrarás en línea. Cuando nos sentamos a diseñar nuestra versión de un brazo robótico Arduino, decidimos asumir un desafío y crearlo con materiales reciclados. La forma en que lo vemos, ser un fabricante, también significa pensar fuera de la caja y preguntarse cómo utilizar los diferentes materiales que están disponibles para usted, sin producir más desperdicio. Usando trozos de madera y algunas botellas de plástico, armamos el cuerpo del brazo del robot. Hicimos termocontraíbles con botellas de plástico con una técnica ingeniosa que aprendimos en línea, y usamos una papa (!) Como peso para que el robot no se volcara.
Este proyecto fue muy divertido para nosotros, ya que nos recordó por qué amamos hacer tanto.
También puede encontrar el tutorial completo para este proyecto y otros en nuestro blog.
Nota:en video verás una versión anterior de circuito.io, por lo tanto, es mejor seguir los pasos del tutorial.
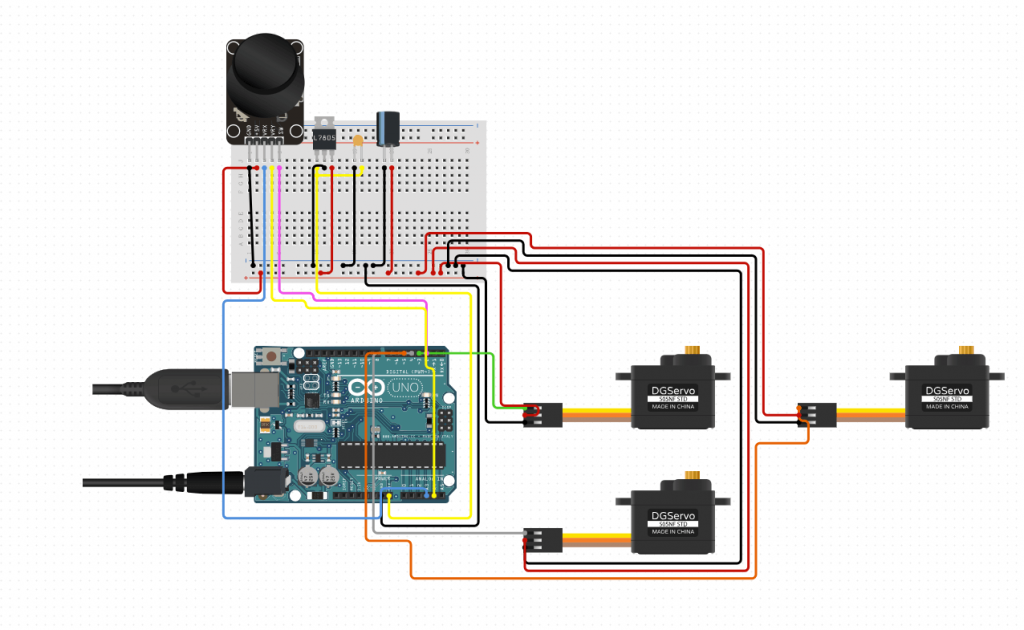
Electrónica
Componentes principales
- Arduino UNO
- 3 SparkFun Servos (Generic Metal Gear)
- Módulo PS2 Joystick de 2 ejes
Componentes secundarios
- Regulador de voltaje 5v
- Condensador electrolítico - 1uF / 50V
- Condensador de cerámica 100nF
- Disipador de calor TO-220
- BreadBoard - Tamaño medio
- Paquete de cables de puente - M / M
Haga clic aquí para ver el diagrama de cableado
Código del brazo del robot
- Primero, deberá descargar el código del circuito desde la pestaña de código en circuito.io.
- Siga los pasos para verificar que lo conectó correctamente
- Reemplace el código de prueba firmware.ino de circuito.io con el código firmware.ino en el repositorio. Deje las otras bibliotecas como están.
- Asegúrate de dejar "Incluir bibliotecas" y "Definiciones de pines". Verifica que las definiciones de pines coincidan.
Materiales

- Usamos trozos de madera de 1 cm de grosor que teníamos en nuestro taller. En algunos lugares, pegamos 2 piezas juntas para mayor resistencia y robustez. Puede buscar otros materiales que tenga a su alrededor, pero asegúrese de que sea resistente pero flexible.
- Para unir las piezas, hicimos termocontraíbles con botellas de plástico. Es una técnica increíble que puedes hacer con botellas de plástico que tienes en casa. Juegue y pruébelos un poco, se sorprenderá de lo fuertes que son.
- El brazo se mueve en 3 ejes, por lo que vamos a utilizar 3 servomotores. Aquí hay un buen artículo que explica cómo elegir un servomotor para su proyecto. Vamos a utilizar el Sparkfun Servo, equipo de metal genérico.
Ensamblaje
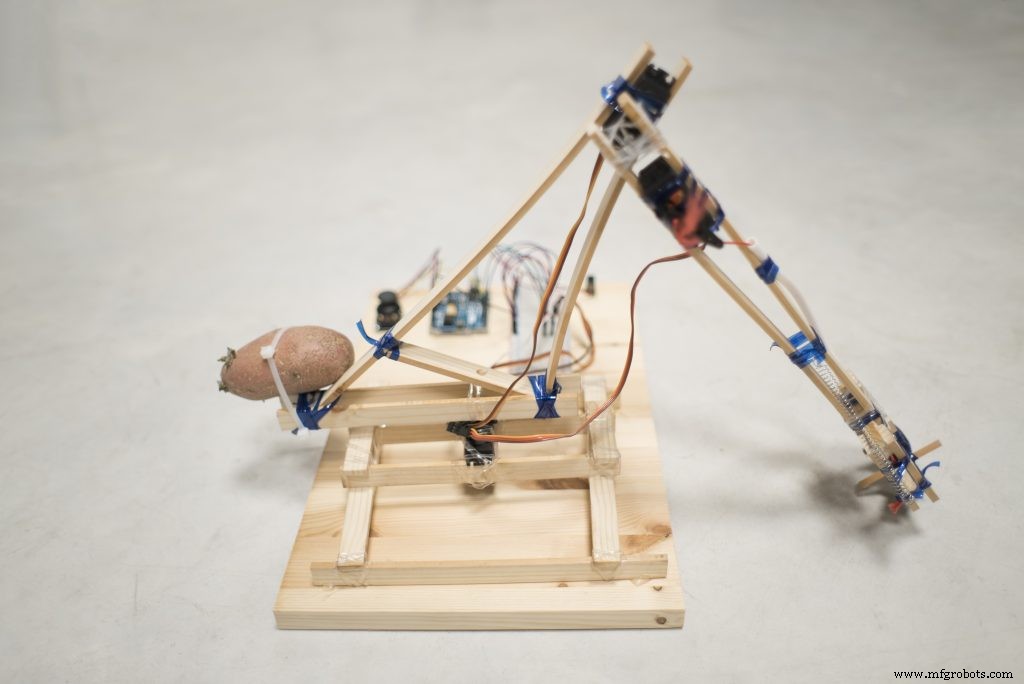
La base
Comience la construcción con una base sólida para que el brazo no se vuelque. Al mismo tiempo, también debemos comprender cuál sería la mejor manera de unir y unir las piezas de madera para que la base sea sólida.
En la imagen de abajo puede ver la forma en que usamos los termocontraíbles y una papa (!) Como base como peso. No olvide reemplazarlo de vez en cuando :)
Equilibrio
Colocar el segundo servo fue más complicado y creemos que esta área aún necesita algo de atención. Después de construir el prototipo, nos dimos cuenta de que no habíamos pensado lo suficiente en equilibrar la parte superior del brazo. Por lo tanto, el servomotor consume mucha corriente, algo que se puede superar usando un contrapeso en el lado opuesto del brazo.
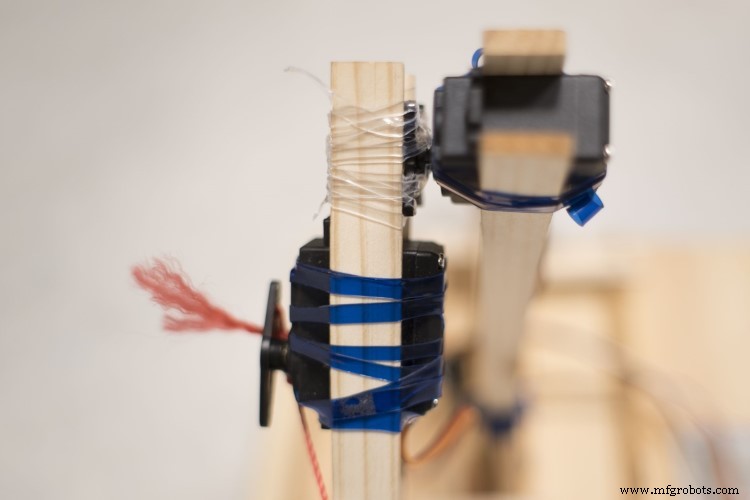
La pinza
Hay diferentes tipos de pinzas que consideramos y no estábamos muy seguros de qué íbamos a hacer aquí. Finalmente, decidimos dejar estático un lado de la pinza para que tenga un agarre fuerte. Como puede ver en la imagen de abajo, para la parte móvil hicimos una junta, que es controlada por el servo y agregamos un resorte para cerrar y abrir.
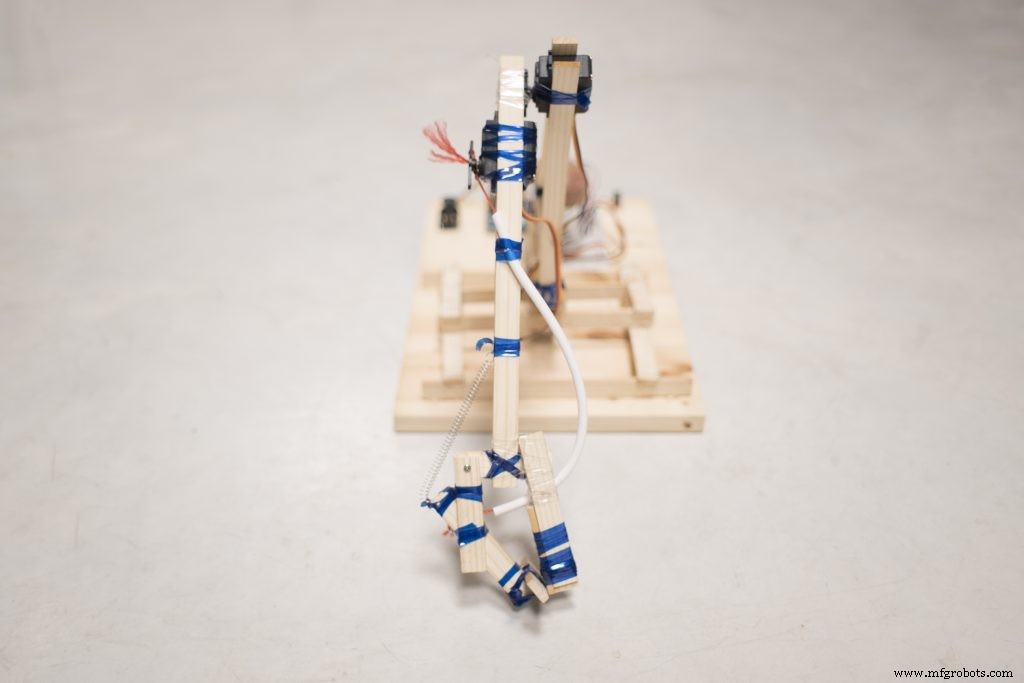
Finalmente, colocamos una cuerda dentro de un tubo elástico para conectar entre el servomotor y la pinza, el mismo mecanismo que puedes encontrar en los frenos de bicicleta.
¡Eso es básicamente! Probablemente necesitará realizar pequeños ajustes y cambios en el código y la mecánica de acuerdo con el material y la electrónica que utilice. Si tiene ideas o comentarios, ¡nos encantaría escucharlos! Compártelos con nosotros en nuestro foro o en los comentarios a continuación
Código
Código del brazo robótico
1. Reemplace el código de prueba firmware.ino de circuito.io con el código firmware.ino en este repositorio2. Deje las otras bibliotecas como están. Asegúrese de dejar "Incluir bibliotecas" y "Definiciones de pines" 4. Compruebe que las definiciones de los pines coincidan https://github.com/Circuito-io/Robotic-ArmProceso de manufactura
- El brazo robótico impreso en 3D de código abierto de Haddington Dynamics
- Robot SCARA de doble brazo
- Diferencias entre robot manipulador y brazo robótico
- Brazo robótico MeArm - Su robot - V1.0
- Brazo robótico Arduino impreso en 3D
- Brazo robótico controlado por Nunchuk (con Arduino)
- Brazo robótico controlado a través de Ethernet
- Brazo robótico de soldadura automatizado
- Brazo robótico controlado por PC
- GXO pilota un brazo robótico personalizado para la logística del comercio electrónico de moda
- El brazo robótico industrial:un auge en la fabricación