


Rastreador solar de panel solar - Cargador de teléfono
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 2 |
Herramientas y máquinas necesarias
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Hacia el medio ambiente
He estado trabajando en la industria de las energías renovables en Australia y jugando con Arduinos desde hace algún tiempo, pero no fue hasta este proyecto que finalmente decidí combinar los dos y construir mi propio pequeño dispositivo solar. Una pequeña nota al principio, este proyecto obviamente requiere 5V para alimentar el Arduino y el servo, que se utilizan para maximizar la salida de los paneles solares que, en el mejor de los casos, producen 3.4V. Así que no se está amortizando exactamente. Sin embargo, el concepto es escalable, por lo que si, por ejemplo, usó este concepto en una matriz de 8 paneles, produciendo 12V, entonces podría encender el arduino y cargar su teléfono sin una fuente de alimentación externa. Planeo hacer esto algún día y agregaré un enlace aquí cuando suceda.
Mientras estoy aquí, será mejor que dé crédito a mis fuentes ...
La vida del bricolaje:http://www.the-diy-life.com/arduino-solar-tracker/
Aparatos para perros marrones:http://www.instructables.com/id/Solar-Altoids-USB-Charger/
Ambas son buenas fuentes de información sobre el tema y de dónde saqué el concepto.
PARA EMPEZAR
Entonces, lo primero es lo primero, necesitas algunos paneles solares. Usé dos, aunque puedes usar tantos como quieras, solo piensa en cuánto podrá levantar / bajar un servo de 9 gramos (no lo hagas demasiado pesado). Los paneles que encontré tenían una potencia nominal de 1,5 V, 0,75 W, que se encuentra en el extremo inferior disponible en estos días. Pero eran livianos y baratos y dado que este es un proyecto de prueba de concepto para mí, el resultado no es muy importante.
Uní mis dos paneles a lo largo del borde con epoxi. Para conectar los paneles en una cuerda, simplemente suelde el cable positivo de un panel al cable negativo del otro, lo que debería dejarle un cable positivo y negativo sobrante. Conecte sus dos LDR a cada lado del panel solar (este y oeste) y suelde un extremo de un cable de puente a cada uno de sus cables. Es más fácil soldar un cable de puente si corta el extremo de un lado y pela el cable unos 5 mm para exponer los cables .

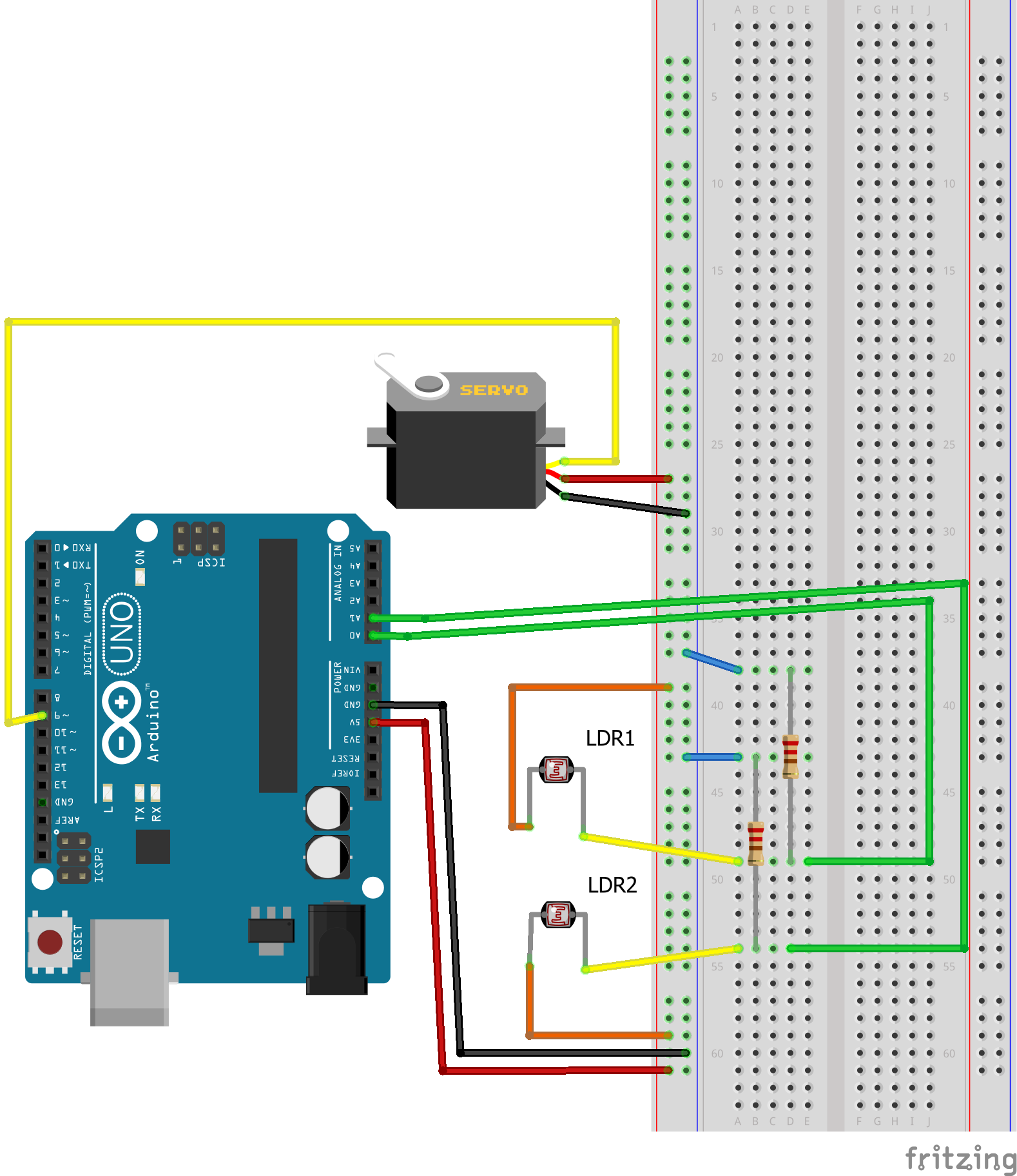
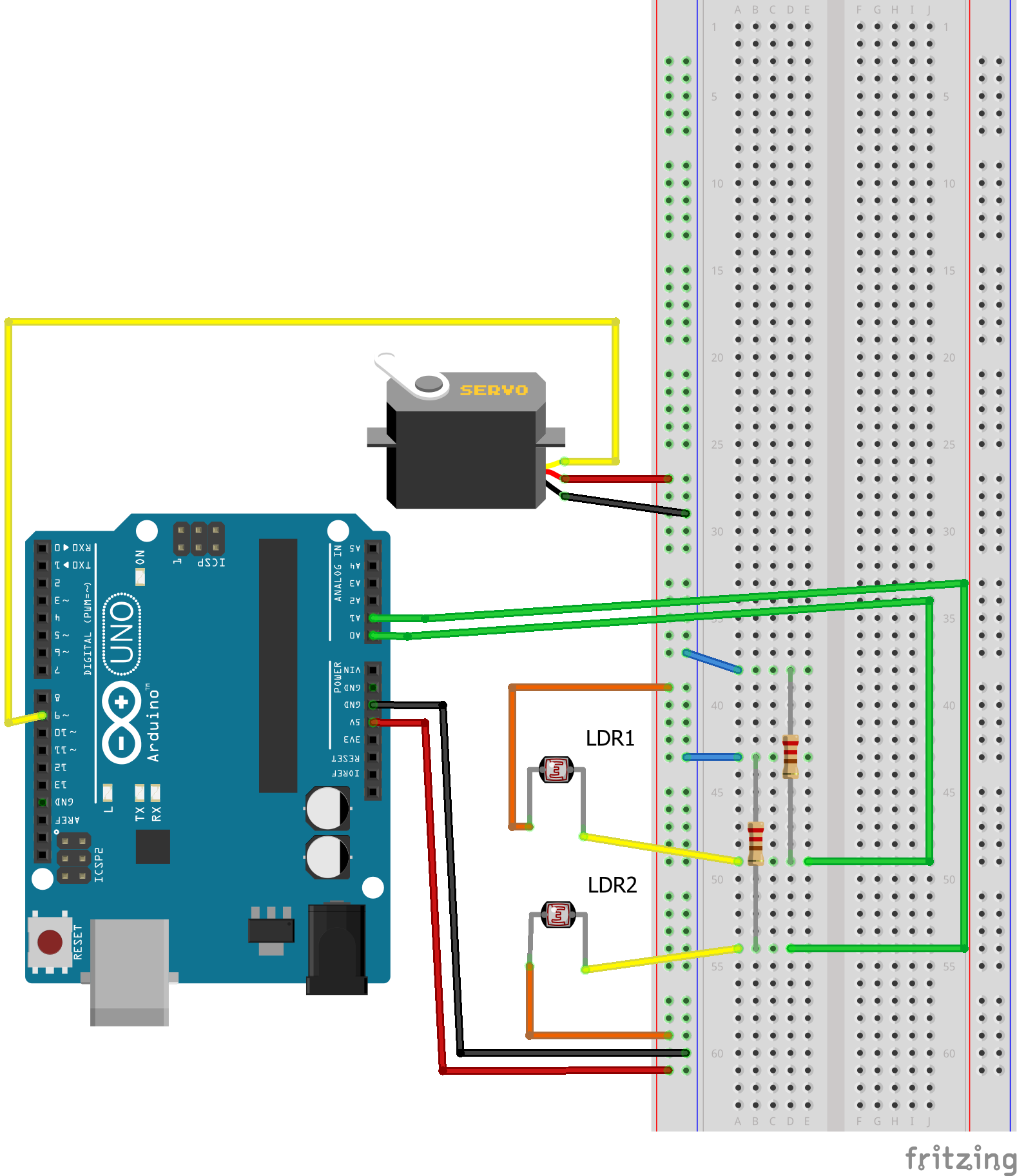
Para que Arduino lea los LDR, necesitamos un circuito divisor de voltaje para cada uno. Consulte aquí los divisores de voltaje. En este circuito, el LDR es R1, y usamos una resistencia de 10kohm para R2, y unimos los cables de puente al arduino donde se encuentran las dos resistencias. Si está construyendo este proyecto en una placa de prueba, un cable LDR irá al divisor de voltaje y el otro al riel de alimentación positivo. Vea el diagrama de Fritzing a continuación.
La estructura del rastreador
Lo siguiente que debe construir es una estructura de soporte giratoria para que el panel se asiente. Mi diseño es básicamente un tramo de acero para muelles sostenido por dos marcos A. La parte inferior del conjunto de paneles tiene pequeños puntales de madera, con orificios para el acero del resorte. Hice todo con madera de balsa para mantenerlo barato, fácil y liviano, pero si se trataba de un accesorio permanente, lo querría con acero delgado o madera contrachapada tratada. No documenté muy bien la construcción del soporte giratorio, pero el video a continuación debería mostrarle cómo se hace, así como la ubicación del servo. Construí el mío con el panel en un ángulo hacia abajo, para poder mirar la base de la estructura al norte, por lo que cualquiera que sea la forma en que el panel se balancee mientras sigue al sol, siempre estará inclinado un poco hacia el norte para maximizar la salida. (Estoy en el hemisferio sur)
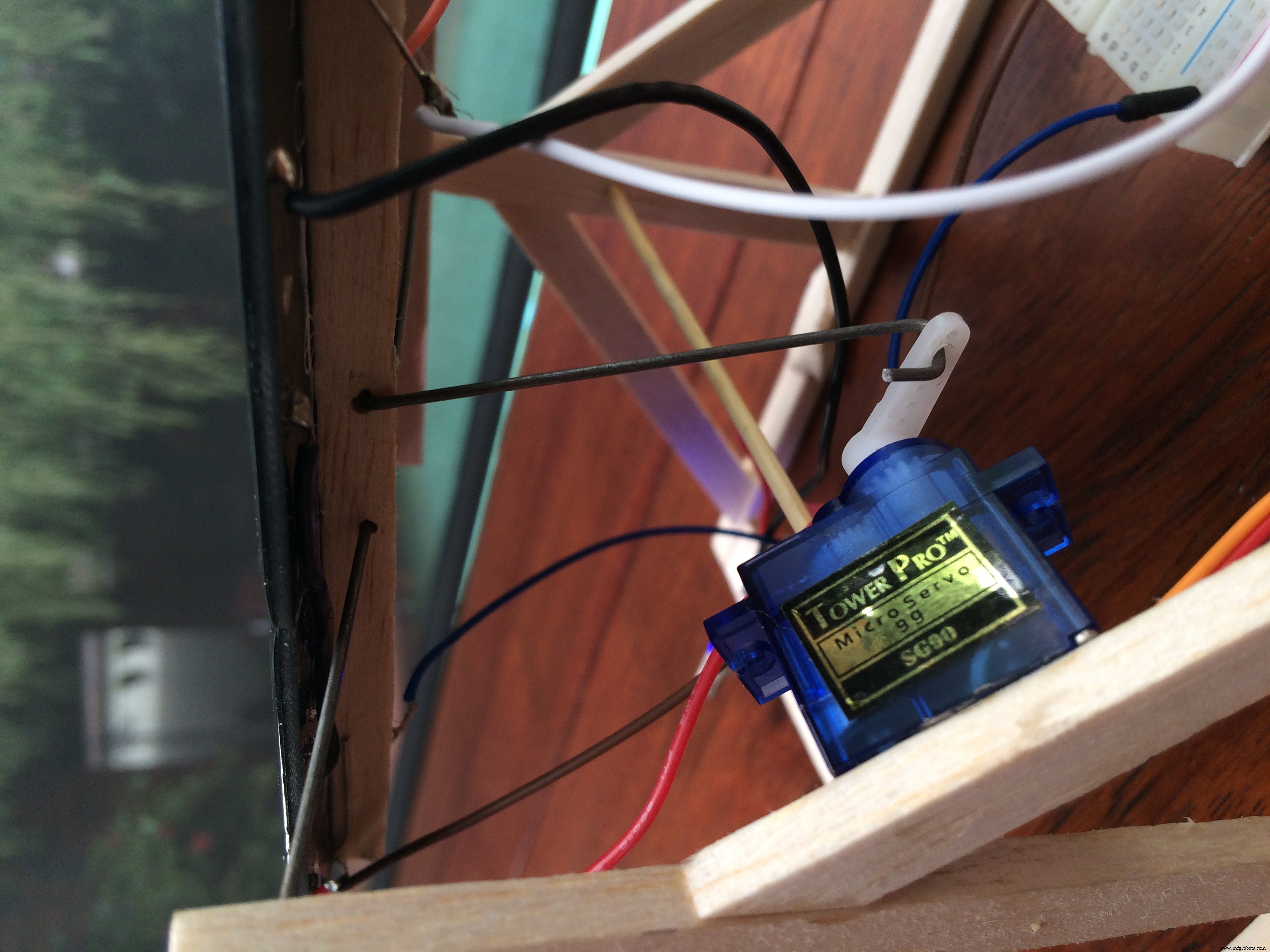
Montaje del servo
El Servo se asienta sobre una de las vigas de soporte de la estructura del marco A y levanta / baja un lado del panel. Doblé un poco de acero para muelles con alicates para obtener extremos enganchados, puedes pasarlo por el puntal del panel y el brazo del servo, es posible que tengas que ensanchar los orificios en el brazo del servo para que quepan en el acero, utilicé la broca más pequeña que pude encontrar. No pegue el acero ni en el brazo del servo ni en el puntal del panel, ya que debe poder girar dentro de los orificios para que el panel se levante sin problemas. Una vez que esté en su lugar, retire el panel de la estructura, de modo que solo quede el servo para que pueda realizar alguna calibración.
Calibración del servo
Abra un nuevo boceto e ingrese el siguiente código.
#include Servo myservo1; // Crea un objeto servo para controlar el servoint pos =10; void setup () {myservo1.attach (9); // adjunta el objeto servo al pin 9 de PWM} void loop () {myservo1.write (pos);} Sube a tu arduino y mira hacia dónde se mueve el servo. Siga cambiando el valor de 'pos' entre 0 y 180 en el boceto y vuelva a cargar el boceto, hasta que encuentre las posiciones donde el brazo del servo apunta hacia arriba y hacia abajo. Esos son sus valores máximo y mínimo. Para mí, fueron 15 y 140. Si el valor se superpone de alguna manera de 180 a 0, retire el brazo del servo y vuelva a colocarlo para que pueda alinearse correctamente.
Poniendo en juntos
Continúe y conecte todo e ingrese el siguiente boceto.
// Sun Tracker Sketch //// Este boceto está diseñado para usarse con un servo de 9 gramos, // capaz de ser alimentado directamente desde Arduinio sin una // fuente de energía externa. Para ver el diagrama de fritzing, consulte el repositorio de Github //https://github.com/nickalanf/Arduino--Projects// La sección del monitor serial es para propósitos de depuración, o para interés general, // una vez que el dispositivo está funcionando correctamente, puede ser diasabled //// Bosquejo por FIELDING - 8/2/18 # incluir Servo servo; // Crea un objeto servo para controlar el servoint eLDRPin =A0; // Asignar pines al LDR'sint wLDRPin =A1; int eastLDR =0; // Crear variables para almacenar en LDR lecturasint westLDR =0; int difference =0; // Cree una variable para comparar los dos LDR'sint error =10; // Variable para si hay una diferencia notable entre el remolque LDR'sint servoSet =130; // Variable para la posición del servo - será diferente para cada dispositivo. Void setup () {servo.attach (9); // adjunta el objeto servo al pin 9 de PWM Serial.begin (9600); } bucle vacío () {eastLDR =analogRead (eLDRPin); // Leer los valores de LDR westLDR =analogRead (wLDRPin); if (eastLDR <400 &&westLDR <400) {// Verifique si hay poca luz en ambos LDR mientras (servoSet <=140 &&> =15) {// si es así, envíe los paneles de regreso al este para el servoSet del amanecer ++; servo.write (servoSet); retraso (100); }} diferencia =eastLDR - westLDR; // Verifique la diferencia if (difference> 10) {// Envíe el panel hacia el LDR con una lectura más alta if (servoSet <=140) {servoSet ++; servo.write (servoSet); }} else if (diferencia <-10) {if (servoSet> =15) {servoSet -; servo.write (servoSet); }} Serial.print (eastLDR); // El monitor serial puede ser útil para depurar / configurar Serial.print ("-"); // Úselo para ver si sus LDR son notablemente diferentes cuando Serial.print (westLDR); // Tienen la misma luz brillando sobre ellos, si es así, corrija con el valor de error Serial.print ("-"); Serial.print (diferencia); Serial.print ("-"); Serial.print (servoSet); // Ajuste la configuración del servo para maximizar el swing disponible Serial.print ("-"); Serial.println ("."); retraso (100);} Abra el monitor en serie e ilumine los LDR. Intente iluminarlo uniformemente en ambos y compruebe el valor de diferencia que se imprime en el monitor de serie. Si es superior a 25 o menos de -25, debe agregar una calibración de error. Agregue el valor de error relevante en el código y luego sume o reste ese valor del LDR relevante. Si los valores de diferencia están cerca, debería estar bien dejar como está.
¡Estás listo para probarlo! lo más fácil es entrar en una habitación oscura y con una antorcha / lámpara. Mueva la luz de un LDR lentamente al otro y observe cómo se mueve el panel. También puede cubrir un LDR y el panel debe alejarse de ese.
BONUS- CARGADOR DE TELÉFONO
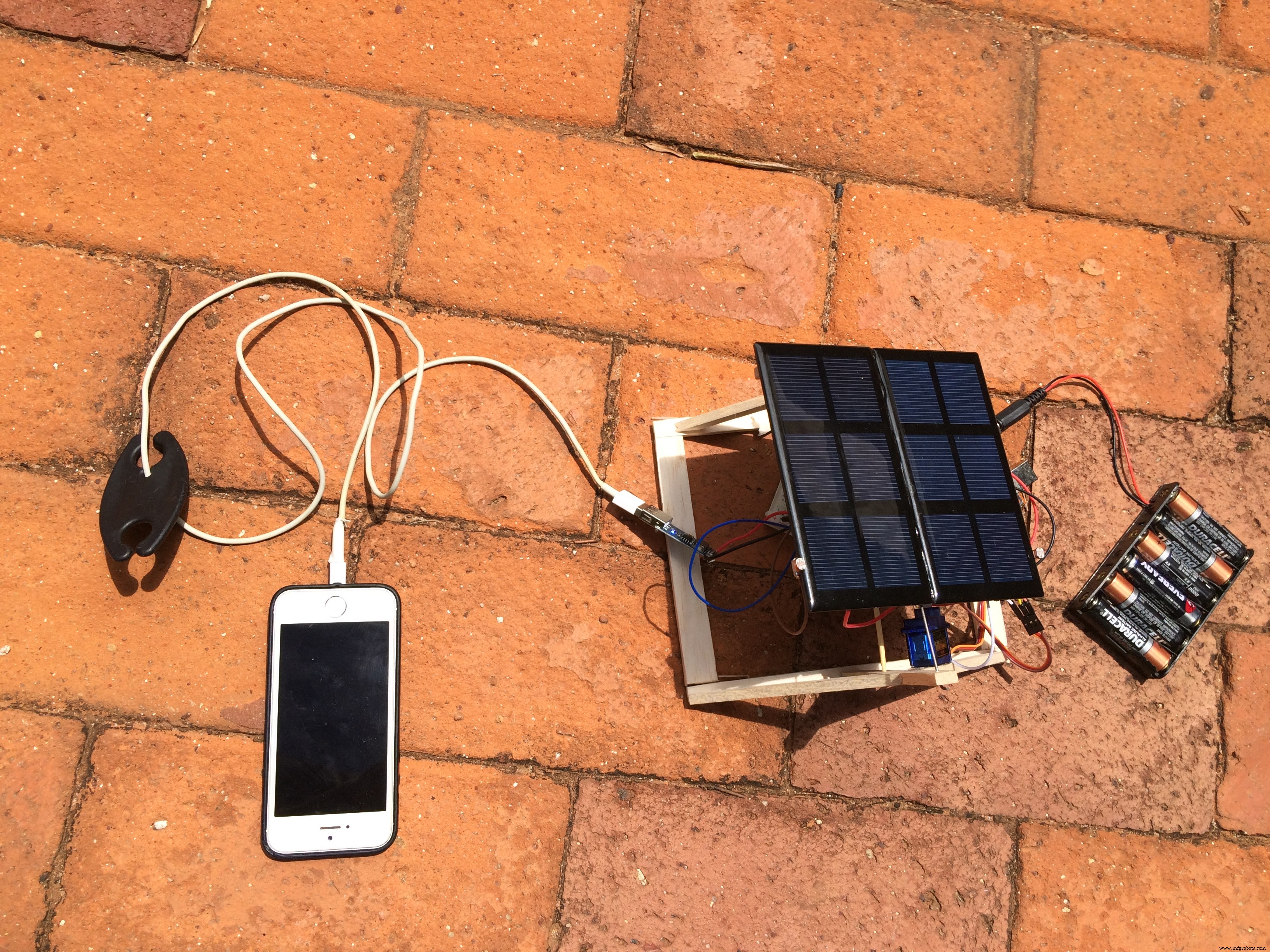
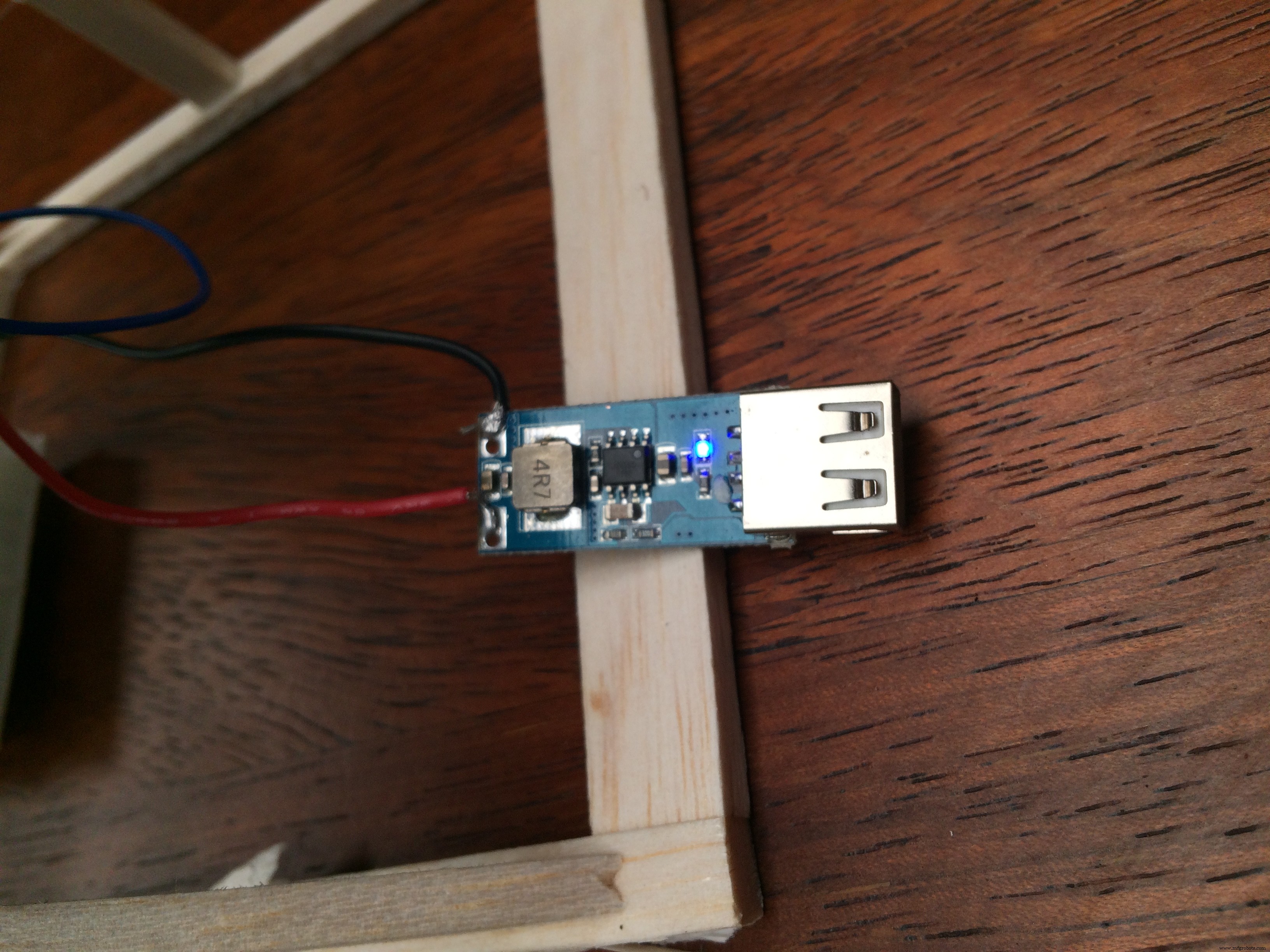
Si realmente desea hacer uso de la salida de los paneles, puede conectar un convertidor elevador CC-CC de 2,5 V a 5 V directamente a los cables que salen de los paneles. Es un circuito completamente separado del arduino / protoboard. Tenga en cuenta que un teléfono estándar se carga a 5 V, y sus paneles pueden emitir 5 V pero una corriente baja, por lo que si su batería está llena o la luz solar es baja, no tendrá suficiente salida para cargar. ¡La forma más fácil de evitar esto es simplemente agregar más paneles!
Código
- rastreador solar
Sun Tracker Procesando
// Sun Tracker Sketch //// Este boceto está diseñado para usarse con un servo de 9 gramos, // capaz de ser alimentado directamente desde Arduinio sin una fuente de // energía externa. Para ver el diagrama de fritzing, consulte el repositorio de Github //https://github.com/nickalanf/Arduino--Projects// La sección del monitor serial es para propósitos de depuración, o para interés general, // una vez que el dispositivo está funcionando correctamente, puede ser diasabled //// Bosquejo por FIELDING - 8/2/18 # incluirServo servo; // Crea un objeto servo para controlar el servoint eLDRPin =A0; // Asignar pines al LDR'sint wLDRPin =A1; int eastLDR =0; // Crear variables para almacenar en LDR lecturasint westLDR =0; int difference =0; // Cree una variable para comparar los dos LDR'sint error =10; // Variable para si hay una diferencia notable entre el remolque LDR'sint servoSet =130; // Variable para la posición del servo - será diferente para cada dispositivo. Void setup () {servo.attach (9); // adjunta el objeto servo al pin 9 de PWM Serial.begin (9600); } bucle vacío () {eastLDR =analogRead (eLDRPin); // Leer los valores de LDR westLDR =analogRead (wLDRPin); if (eastLDR <400 &&westLDR <400) {// Verifique si hay poca luz en ambos LDR mientras (servoSet <=140 &&> =15) {// si es así, envíe los paneles de regreso al este para el servoSet del amanecer ++; servo.write (servoSet); retraso (100); }} diferencia =eastLDR - westLDR; // Verifique la diferencia if (difference> 10) {// Envíe el panel hacia el LDR con una lectura más alta if (servoSet <=140) {servoSet ++; servo.write (servoSet); }} else if (diferencia <-10) {if (servoSet> =15) {servoSet -; servo.write (servoSet); }} Serial.print (eastLDR); // El monitor serial puede ser útil para depurar / configurar Serial.print ("-"); // Úselo para ver si sus LDR son notablemente diferentes cuando Serial.print (westLDR); // Tienen la misma luz brillando sobre ellos, si es así, corrija con el valor de error Serial.print ("-"); Serial.print (diferencia); Serial.print ("-"); Serial.print (servoSet); // Ajuste la configuración del servo para maximizar el swing disponible Serial.print ("-"); Serial.println ("."); retraso (100);}
Esquemas
Proceso de manufactura
- Célula solar
- Adquisición de datos en tiempo real del panel solar usando Arduino
- Seguidor solar V2.0
- Seguidor solar basado en Internet de las cosas (IoT)
- Sistema solar de seguimiento solar
- SmartPostBox
- Plataforma de paneles solares con seguimiento de luz y servocontrolados
- Panel de seguidor solar de doble eje con modo automático y manual
- Arduino - Cargador solar PV MPPT
- Panel solar:problemas de calidad y puntos clave de control
- Proceso de fabricación de paneles solares:¿Cómo se fabrican los paneles solares?