


Automatización de puertas correderas
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Acerca de este proyecto
Descripción general del proyecto
En este proyecto utilizo el poder de Arduino para crear un circuito para alimentar una puerta corredera. El objetivo principal de este proyecto es utilizar una puerta corredera muerta con un motor de CA en funcionamiento y automatizar el sistema utilizando un Arduino, un par de relés, un receptor de 433 MHz, un transmisor de 433 MHz y algunas habilidades eléctricas ingeniosas. El sistema crea un método para alimentar el motor de la puerta cuando sea necesario y para decidir si abrir o cerrar la puerta.
El Arduino escucha constantemente una respuesta establecida del transmisor, en este caso es el control remoto que se usa para abrir o cerrar la puerta. El transmisor opera en dos canales, donde cada canal tiene su identificación única. Una vez que el receptor de 433 MHz recibe esta identificación, envía una señal al Arduino que controla los relés para alimentar el motor.
Metodología
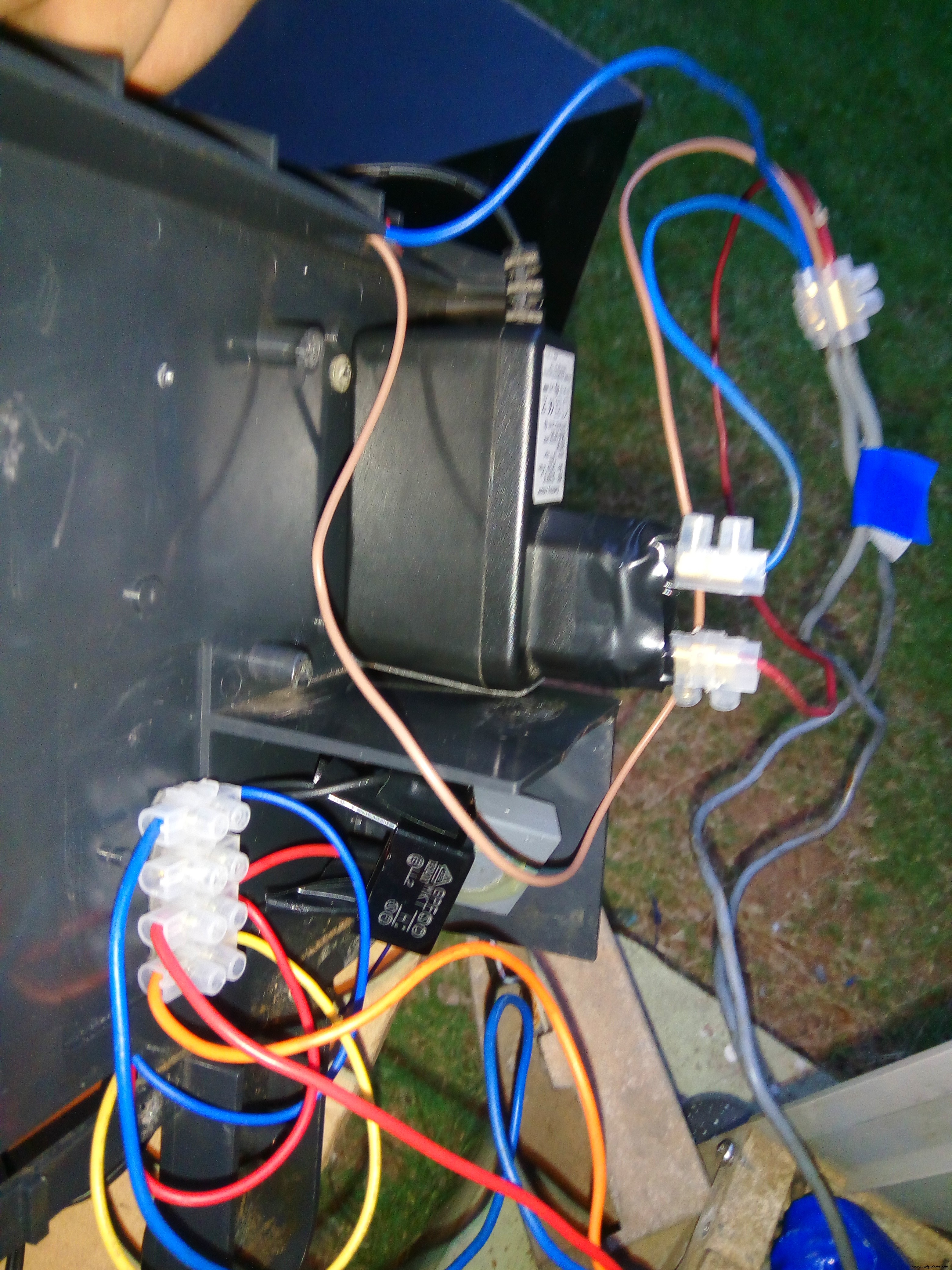
Paso 1:encendido del motor
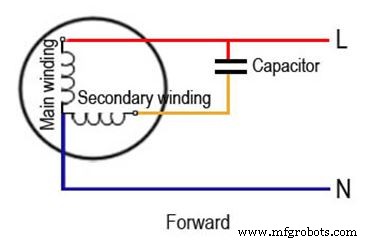
La configuración para accionar el motor se muestra a continuación. Para que el motor mueva la puerta en la dirección de avance (cierre), el devanado principal debe estar conectado a la alimentación principal.
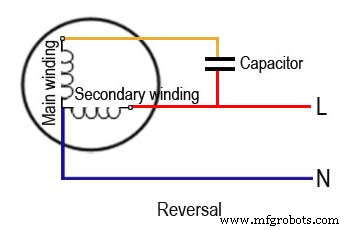
Para que el motor se mueva en la dirección opuesta (abierta), el devanado secundario debe estar conectado a la alimentación principal.
Es necesario identificar qué cable corresponde a qué devanado. Por lo general, los cables no están etiquetados y esto se puede identificar mediante prueba y error al suministrar energía CA al cable.
En mi caso, estaba trabajando con un motor de 220 ~ 240 VCA. Pude identificar el cable neutro fácilmente ya que era de color azul, que es un color estándar que se usa para indicar el terminal neutro.
Luego, conecté el terminal Live al cable rojo, lo que hizo que el motor girara hacia adelante. Esto indicó que suministré energía al Bobinado principal del motor.
Nota: Asegúrese de que el condensador de arranque esté conectado correctamente y funcionando. Esto asegura que el motor tenga un par de arranque adecuado.
Paso 2:detener el motor
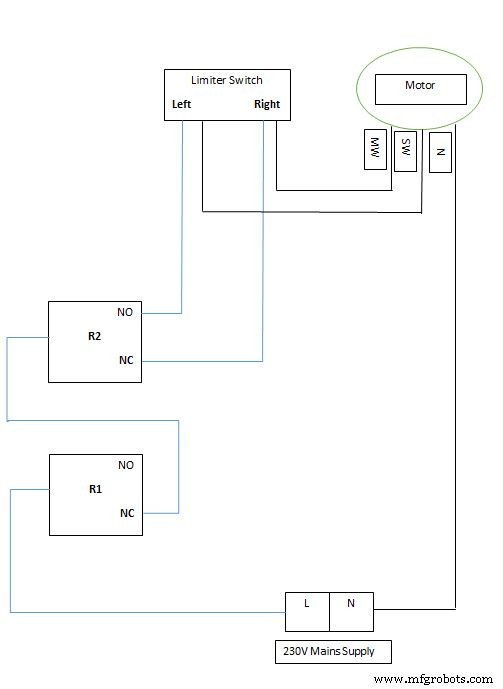
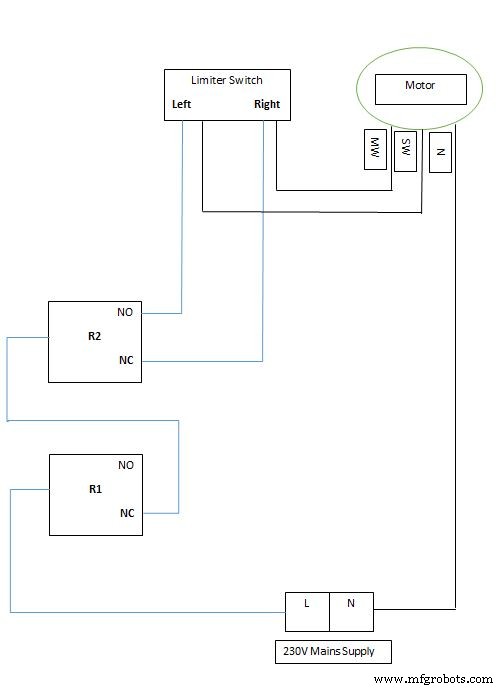
La alimentación de red se suministra al motor a través de un interruptor limitador. Tan pronto como la puerta llega a un extremo, se activa el interruptor limitador que abre el circuito y detiene el suministro de energía de la red principal al motor.
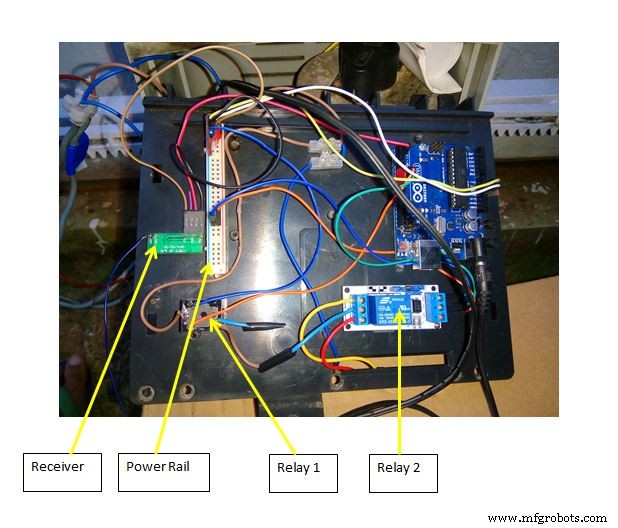
Paso 3:uso de relés para controlar el motor
El relé tiene dos puntos de contacto; Normalmente abierto y normalmente cerrado.
La ruta normalmente cerrada se utiliza para alimentar el devanado principal del motor. Esto se eligió para garantizar que cuando se reiniciara el sistema o si algo fallaba en el sistema, el motor se aseguraría de que la puerta se mantuviera cerrada en todo momento.
La ruta normalmente abierta se utiliza para alimentar el devanado secundario del motor. La ruta normalmente abierta se cierra cuando se energiza la bobina dentro del relé. Esto se puede hacer enviando una señal de 5V desde el Arduino ya que los relés utilizados funcionan por debajo de 5V.
Al utilizar dos caminos para alimentar el motor, se asegura que no se suministre energía simultáneamente a los devanados principal y secundario del motor.
Este relé ( R2 ) se opera a través del pin 8 del Arduino.
Un segundo relevo ( R1 ) se usa para romper el circuito para que el motor se detenga si el Arduino recibe el comando del receptor mientras la puerta se está moviendo.
El Arduino comprueba constantemente el receptor si ha recibido algún comando. Una vez que se emite un comando, Arduino redirige la energía al motor para que cierre o abra la puerta.
El propósito principal del segundo relé es darle al sistema tiempo suficiente para desviar el sistema para alimentar el motor sin cambiar instantáneamente la dirección en la que el motor está girando. Una vez que se completa el cambio de ruta, el relé se apaga y se suministra energía al motor para girar en la dirección opuesta.
Este relé se opera a través del pin 9 del Arduino.
Propósito del segundo relevo
Si el sistema está a la mitad del cierre de la puerta y recibe la orden del receptor para abrir la puerta, el relé se activa para desviar la energía al devanado secundario. Dado que esto sucede casi instantáneamente, el relé está bajo presión constante de la tensión inversa generada por el motor debido a la toma repentina de energía en el devanado principal. Además, los contactos del relé se dañarán permanentemente si se someten a una tensión continua.
Con la ayuda de un relé adicional, la fuente de alimentación se desconecta del motor y le da al sistema un tiempo de 10 segundos para desviar la energía a los devanados necesarios. Esto reduce la tensión en los contactos del relé y aumenta su vida útil.
Método de protección de relé:
Condensadores de supresión
Cuando un motor de CC se detiene repentinamente, la bobina del motor crea un bucle de corriente negativo, esto se debe a las propiedades inductivas de una bobina. Sin embargo, esto se puede neutralizar instalando un diodo de retroalimentación para proporcionar un camino para que fluya la corriente negativa.
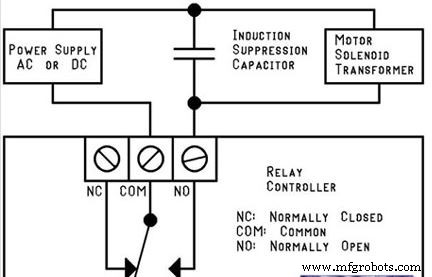
Cuando un motor de CA se detiene repentinamente a través de un interruptor, crea una acumulación de alto voltaje en los contactos del interruptor.
Los condensadores de supresión se utilizan para evitar la acumulación de alto voltaje en los contactos del relé cuando se le indica al motor que opere en la dirección opuesta. Esto protege a los contactos habituales.

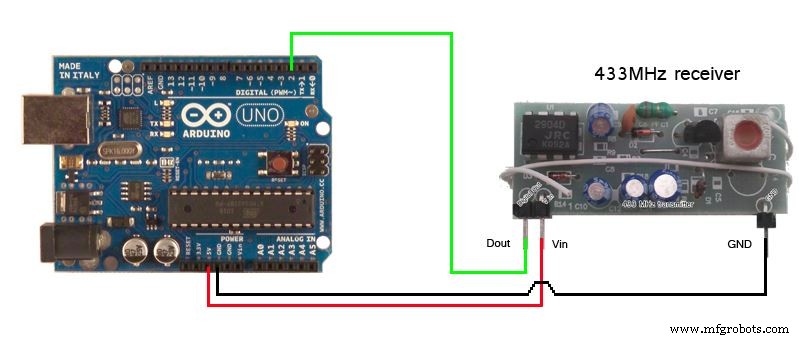
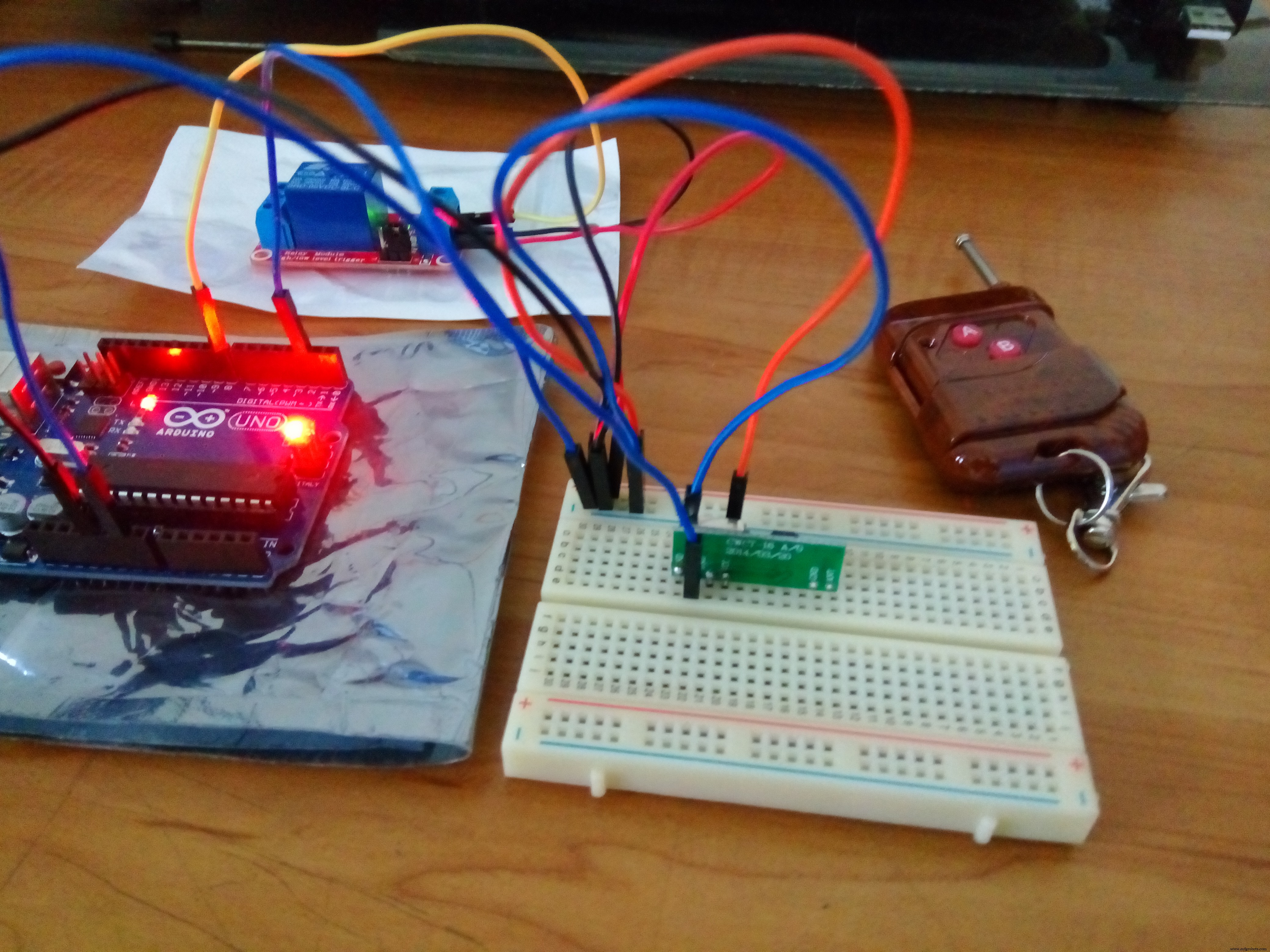
Paso 4:para configurar el receptor
El receptor funciona a 433 MHz, el programa de Arduino se repite continuamente para comprobar el puerto de señal del receptor. Una vez que se recibe la señal correcta, Arduino activa el relé 1 (R1) para que el relé 2 (R2) dirija la energía al motor.
Cuando los datos se envían desde el transmisor, el receptor los recibe en forma de un número entero. En mi caso, usando el monitor serial del Arduino pude ver el valor que el receptor pudo captar.
Las principales razones para utilizar una frecuencia de radio más alta para la comunicación es que el rango operativo es alto y el receptor recibe la señal, incluso si hay algunos obstáculos que bloquean la señal. Esto solo se puede lograr mediante ondas de radio de alta frecuencia.
En mi proyecto, pude obtener un radio de trabajo de aproximadamente 30 pies para que el sistema se activara.
Nota: El radio de funcionamiento del sistema se puede ampliar unos pocos pies soldando un cable largo a la Antena puerto en el módulo receptor.

Video de demostración
Instantáneas del proyecto final
Esquemas
Proceso de manufactura
- RASPBERRY PI HOME AUTOMATION
- Prototipo de Raspoulette
- Energía eólica
- Guía de martillos de potencia
- El centro de torneado cuenta con un motor de husillo de alto torque de 75 HP
- Industria 4.0 en la fabricación:el creciente poder de la automatización
- ¿Qué es un motor lineal?
- Comprender la automatización de la prensa
- ¿Qué es un servomotor?
- ¿Qué es un portabrocas eléctrico?
- El poder de la IA en la automatización industrial