


Earth_Analyzer
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
 |
| |||
 |
| |||
 |
|
Aplicaciones y servicios en línea
 |
| |||
 |
| |||
| ||||
 |
| |||
| ||||
 |
| |||
 |
|
Acerca de este proyecto
HOLA, HOLA CADA UNO
Este proyecto trata principalmente sobre el rover terrestre que puede ayudar a los agricultores. Este proyecto contiene principalmente tres módulos.
MÓDULO 1:
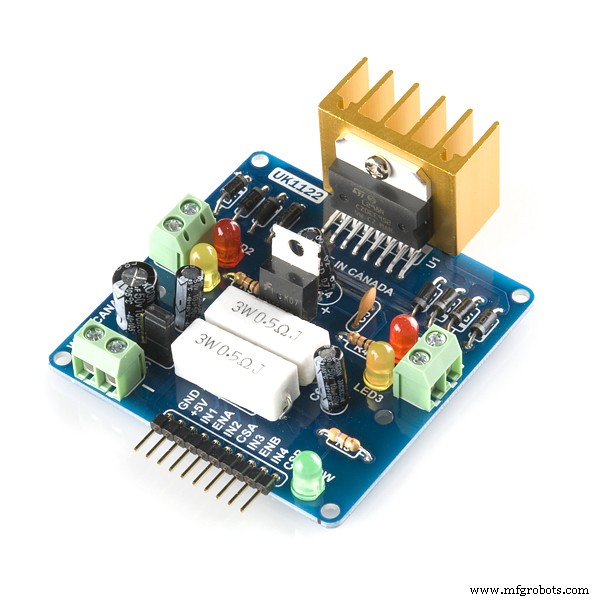
Las conexiones de hardware para la configuración completa ahora consideran los motores de CC.
Esto requiere los dos motores de CC y un controlador de motor. controlador de motor contiene
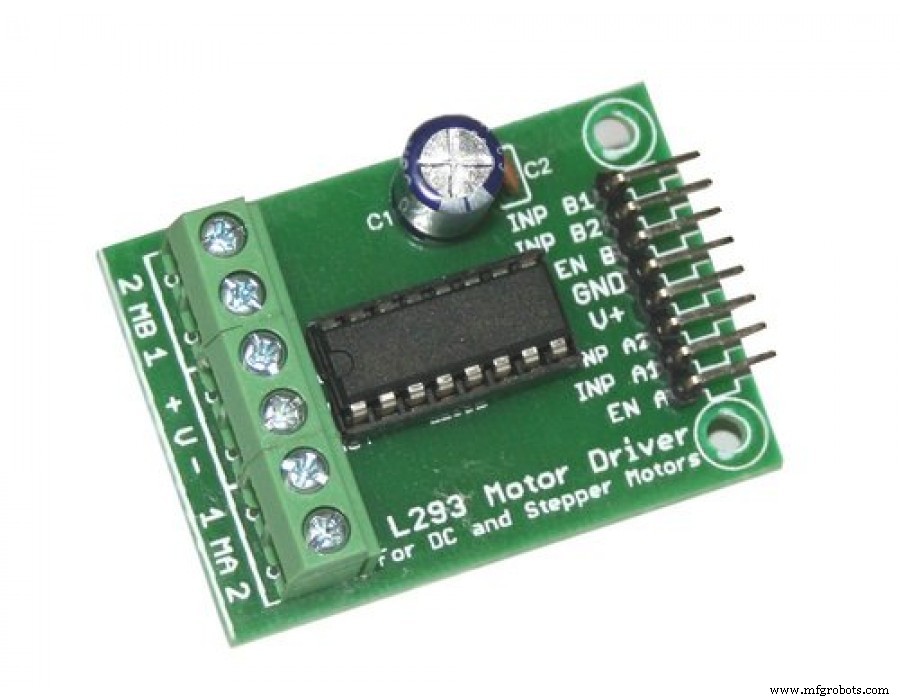
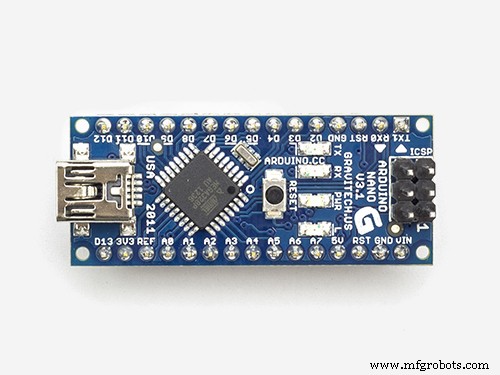
Aquí tiene que conectar el v +, en1, en2, al punto único en la placa de prueba y los cuatro cables del motor a las cuatro entradas en los pines de 1 ma 2 Ahora, a continuación, los pines de salida del pin del controlador del motor están conectados al arduino y La batería debe conectarse como se muestra a continuación.
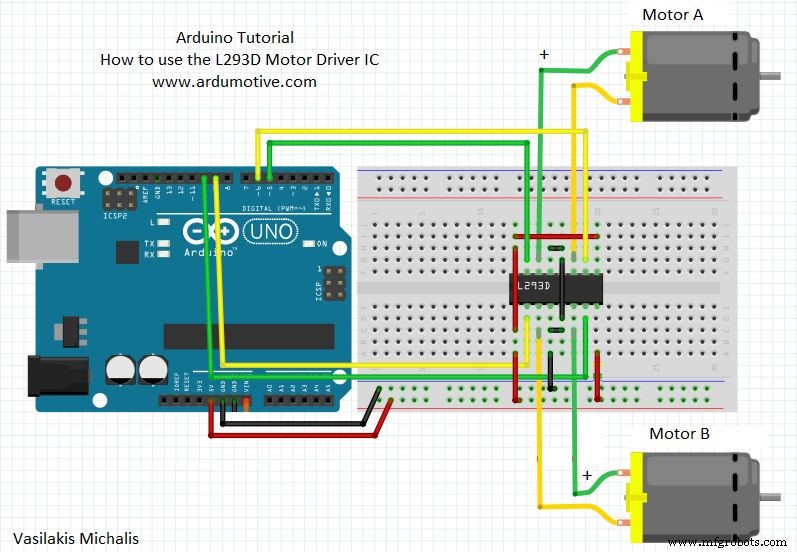
Ahora a continuación tenemos que conectarlos al perno. Los mismos cuatro pines deben estar conectados a los pines digitales del perno (0, 1, 2, 3).
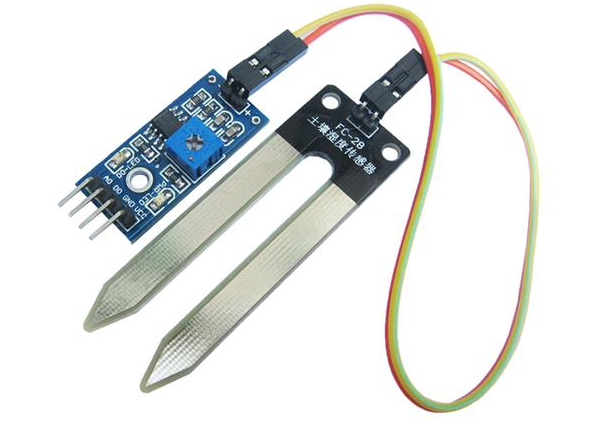
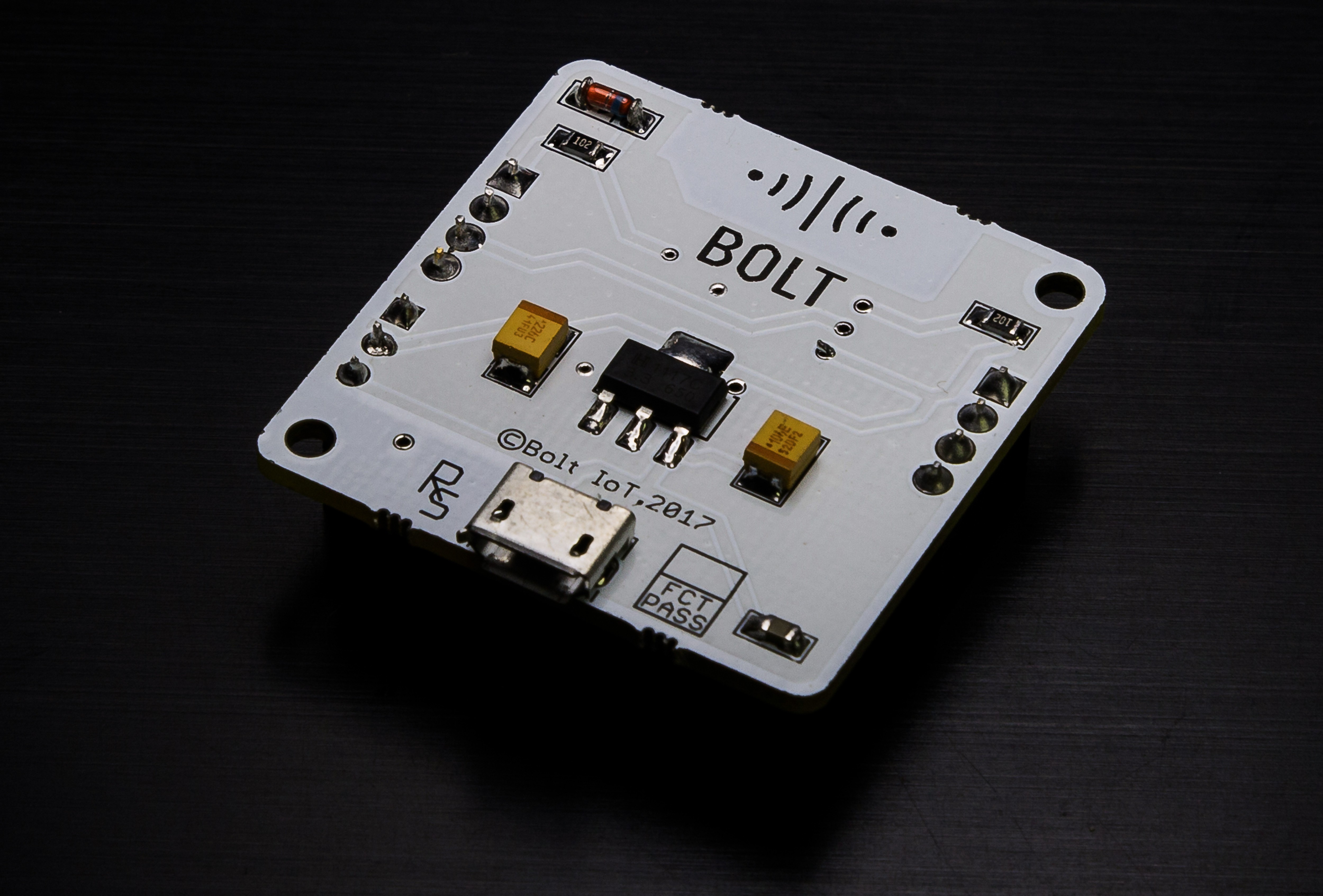
ahora el sensor de suelo debe estar conectado al perno pero colocando el pin digital en el perno (digital 4 pin). Ahora finalmente es el momento de conectar el sensor de temperatura al perno analógico del perno (A0).
Ahora esta vez toda la tierra y el v + (sensor de temperatura, sensor de humedad), en1, en2 a los 5v del arduino y finalmente todo este pin se debe suministrar con las baterías de voltaje requeridas.
MÓDULO 2:
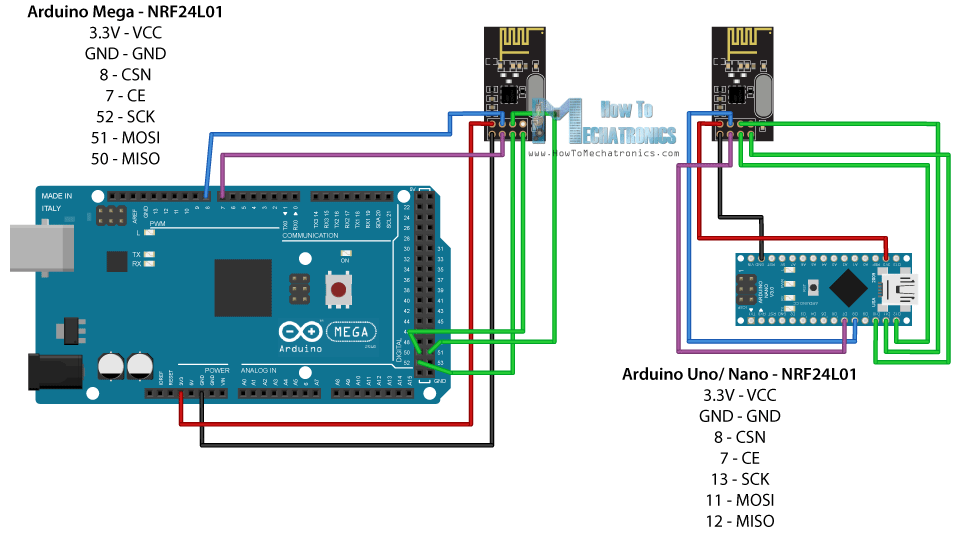
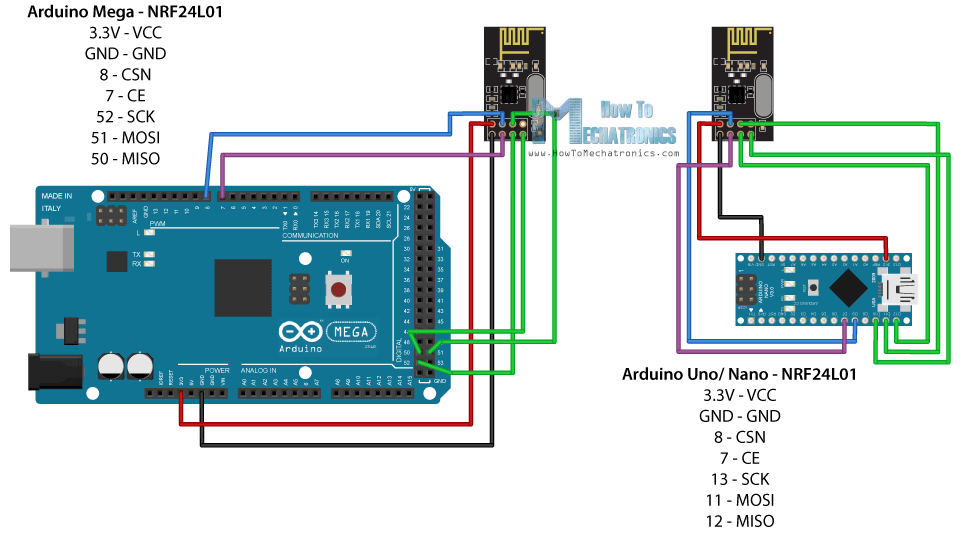
CONEXIONES NRF:

El diagrama anterior se denomina módulo nrf que se utiliza para la comunicación por radio. El diagrama anterior también debe incluirse en nuestro circuito para controlar el automóvil en las áreas cercanas.

CONEXIÓN FINAL DEL NRF CON EL ARDUINO
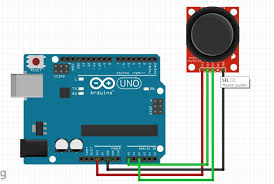
AHORA ES EL MOMENTO DE CONECTAR JOY STICKS:
Se utilizan dos joysticks:
1) para controlar la dirección del automóvil.
2) para controlar el servo.
MÓDULO 3:
CODIFICACIÓN FINAL
1) CODIFICACIÓN ARDUINO:
transmisor:
#include
#include
#include
#include
#include
Radio RF24 (7, 8); // CSN, CE
const byte address [6] ="00001";
int x_key =A1;
int y_key =A0;
int p_key =A3;
int q_key =A2;
int x_pos;
int y_pos;
int p_pos;
int q_pos;
void setup () {
radio.begin ();
radio.openWritingPipe (dirección)
;
radio.setPALevel (RF24_PA_MIN);
radio.setChannel (87);
radio.setDataRate (RF24_
250KBPS);
radio.stopListening ();
Serial.begin (9600);
pinMode (x_key, INPUT);
pinMode (y_key, INPUT);
pinMode (p_key, INPUT);
pinMode (q_key, ENTRADA);
}
int pos;
bucle vacío () {
x_pos =analogRead (x_key);
y_pos =analogRead (y_key);
p_pos =analogRead (p_key);
q_pos =analogRead (q_key);
Serial.println (x_pos);
Serial.println (y_pos);
Serial.println (p_pos);
Serial.println (q_pos);
if ( p_pos> 400 &&p_pos <600 &&q_pos> 400 &&q_pos <600)
{
if (x_pos> 400 &&x_pos <600 &&y_pos> 400 &&y_pos <600)
{
pos =100;
radio.write (&pos, sizeof (pos));
}
if (x_pos> 400 &&x_pos <600 &&y_pos <400)
{
pos =200;
radio.write (&pos, sizeof (pos));
}
if (x_pos> 400 &&x_pos <600 &&y_pos> 600)
{
pos =300;
radio.write (&pos, sizeof (pos));
}
if (y_pos> 400 &&y_pos <600 &&x_pos <400)
{
pos =400;
radio.write (&pos, sizeof (pos));
}
if (y_pos> 400 &&y_pos <600 &&x_pos> 600 )
{
pos =500;
radio.write (&pos, sizeof (pos));
}
Serial.println (pos);
delay (100);
}
else if (p_pos <400 || p_pos> 600)
{
if (p_pos <400)
{
pos =600;
radio.write (&pos, sizeof (pos));
}
if (p_pos> 600)
{
pos =700;
radio.write (&pos, sizeof (pos));
}
delay (100);
}
} receptor:
#include
#include
#include
#include
#include
#include
Servo servo;
Radio RF24 (7, 8); // CSN, CE
const byte address [6] ="00001";
int servo_pin =9;
int sensor_pin =A0;
int output_value;
void setup () {
Serial.begin (9600);
radio.begin ();
servo.attach (servo_pin);
radio.openReadingPipe (0, dirección);
radio.setPALevel (RF24_PA_MIN);
radio.setChannel (87);
radio.setDataRate (RF24_250KBPS);
radio.startListening ();
}
int pos;
void loop () {
if (radio.available ()) {
radio.read (&pos, sizeof (pos));
Serial.println (pos);
if (pos ==100)
{
digitalWrite (6, LOW);
digitalWrite (5, LOW);
digitalWrite (4, LOW);
digitalWrite (3, LOW);
// Serial.println ("gk0");
}
else if (pos ==200) {
escritura digital (6, ALTA);
escritura digital (5, BAJA);
escritura digital (4, ALTA);
escritura digital (3, BAJA);
retardo ( 10);
// Serial.println ("gk1");
}
else if (pos ==300) {
digitalWrite (6, LOW);
escritura digital (5, ALTA);
digital Write (4, LOW);
digitalWrite (3, HIGH);
delay (10);
// Serial.println ("gk2");
}
else if (pos ==400) {
digitalWrite (6, LOW);
digitalWrite (5, HIGH);
digitalWrite (4, HIGH);
digitalWrite (3 , LOW);
delay (10);
// Serial.println ("gk3");
}
else if (pos ==500) {
escritura digital (6, ALTA);
escritura digital (5, BAJA);
escritura digital (4, BAJA);
escritura digital (3, ALTA);
retardo (10);
// Serial.println ("gk5");
}
else if (pos ==600) {
servo.write (90);
delay (10 );
// Serial.println ("gk6");
}
else if (pos ==700) {
servo.write (180);
delay ( 10);
// Serial.println ("gk7");
}
}
else
{
Serial.println ( "conexión perdida");
}
}
} ahora para recibir el mensaje de telegrama:(código del servidor)
inicie sesión en uno de los servidores como ripl.it y luego cargue los códigos
main.py
solicitudes de importación # para realizar solicitudes HTTP
importación json # biblioteca para manejar datos JSON
módulo de tiempo de importación # para operación de suspensión
desde boltiot import Bolt # importando Bolt desde módulo boltiot
importar archivo de configuración conf #
mybolt =Bolt (conf.bolt_api_key, conf.device_id)
def get_sensor_value_from_pin (pin):
intente:
respuesta =mybolt.digitalRead (pin)
datos =json.loads (respuesta)
si datos ["éxito"]! =1:
print ("Solicitud no satisfactoria")
print ("Esto es la respuesta-> ", data)
return -999
sensor_value =int (data [" value "])
return sensor_value
excepto Exception como e:
print ("Algo salió mal al devolver el valor del sensor")
print (e)
return -999
def send_telegram_message (message):
"" "Envía mensaje vía Telegram" ""
url ="https://api.telegram.org/" + conf.telegram_bot_id + "/ sendMessage"
data ={
"chat_id":conf.telegram_chat_id,
"texto":mensaje
}
intente:
volver sponse =request.request (
"GET",
url,
params =data
)
print ("Esta es la respuesta de Telegram")
print (response.text)
telegram_data =json.loads (response.text)
return telegram_data ["ok"]
excepto Exception as e:
print ("Ocurrió un error al enviar el mensaje de alerta a través de Telegram ")
print (e)
return False
while True:
# Paso 1
sensor_value =get_sensor_value_from_pin (" 4 ")
print ("El valor actual del sensor es:", sensor_value)
# Paso 2
if sensor_value ==-999:
print ("La solicitud no se realizó correctamente. Skipping. ")
time.sleep (10)
continue
# Paso 3
if sensor_value> =conf.threshold:
print (" El valor de temperatura actual es ")
message =" El valor de humedad es un poco mayor que el umbral "
telegram_status =send_telegram_message (message)
print (" Este es el estado de Telegram:", telegram_status)
# Paso 4
time.sleep (100) conf.py:
"" "Configuraciones para telegram_alert.py" ""
bolt_api_key ="XXXX" # Esta es su clave API de Bolt Cloud
device_id ="XXXX" # Este es el ID del dispositivo y será similar a BOLTXXXX donde XXXX son algunos números
telegram_chat_id ="@XXXX" # Este es el ID de canal del canal de Telegram creado. Pegar después de @
telegram_bot_id ="botXXXX" # Este es el ID de bot del Telegram Bot creado. Pegar después del bot
umbral =0 # Umbral más allá del cual se debe enviar la alerta ingrese sus valores de bot y api
PROCESO:
Mensajes de alerta usando Telegram
¿Qué es Telegram?
Telegram es una aplicación de mensajería similar a Whatsapp. También puede enviar y recibir mensajes junto con archivos. Es GRATIS de usar. Puede acceder a la plataforma a través de su teléfono Android / iOS / Windows y también su PC o Mac.

Algunas terminologías de Telegram -
¿Qué es un canal de Telegram?
Un canal es para Telegram lo que son los Grupos para Whatsapp. Los canales son una herramienta para transmitir sus mensajes a grandes audiencias. Pueden tener un número ilimitado de suscriptores, pueden ser públicos con una URL permanente y cada publicación en un canal tiene su propio contador de visitas.
¿Qué es un bot?
Los bots son aplicaciones de terceros que se ejecutan dentro de Telegram. Los usuarios pueden interactuar con los bots enviándoles mensajes, comandos y solicitudes.
Usaremos Bots para enviar alertas en nuestro canal.
¿Qué aprenderemos en este proyecto?
En este proyecto, podrá enviar alertas a través de Telegram a su teléfono cuando el valor del sensor exceda su umbral establecido.
¿Qué necesito para este proyecto?
Para enviar alertas y mensajes a través de Telegram, necesitará,
- Un teléfono Android / iOS / Windows con conectividad a Internet.
- Una cuenta de Telegram. Necesitará un número de teléfono móvil para esto.
- Acceda a su sistema operativo Ubuntu a través de puTTY o máquina virtual.
Configurar Telegram
Pasos para registrarse / iniciar sesión en Telegram
- Vaya a Playstore o App Store en su teléfono y busque Telegram.
- Descargue e instale la última versión de la aplicación Telegram.
- Regístrese para obtener una nueva cuenta o inicie sesión en Telegram proporcionando su número de teléfono móvil.
- Telegram te llamará O te enviará un SMS para verificar tu número de móvil.
- Verifique su cuenta y apruebe los permisos si es necesario.
- Iniciarás sesión en Telegram y se te mostrará una pantalla similar a la que se muestra a continuación. (Está bien si difiere de la captura de pantalla a continuación)
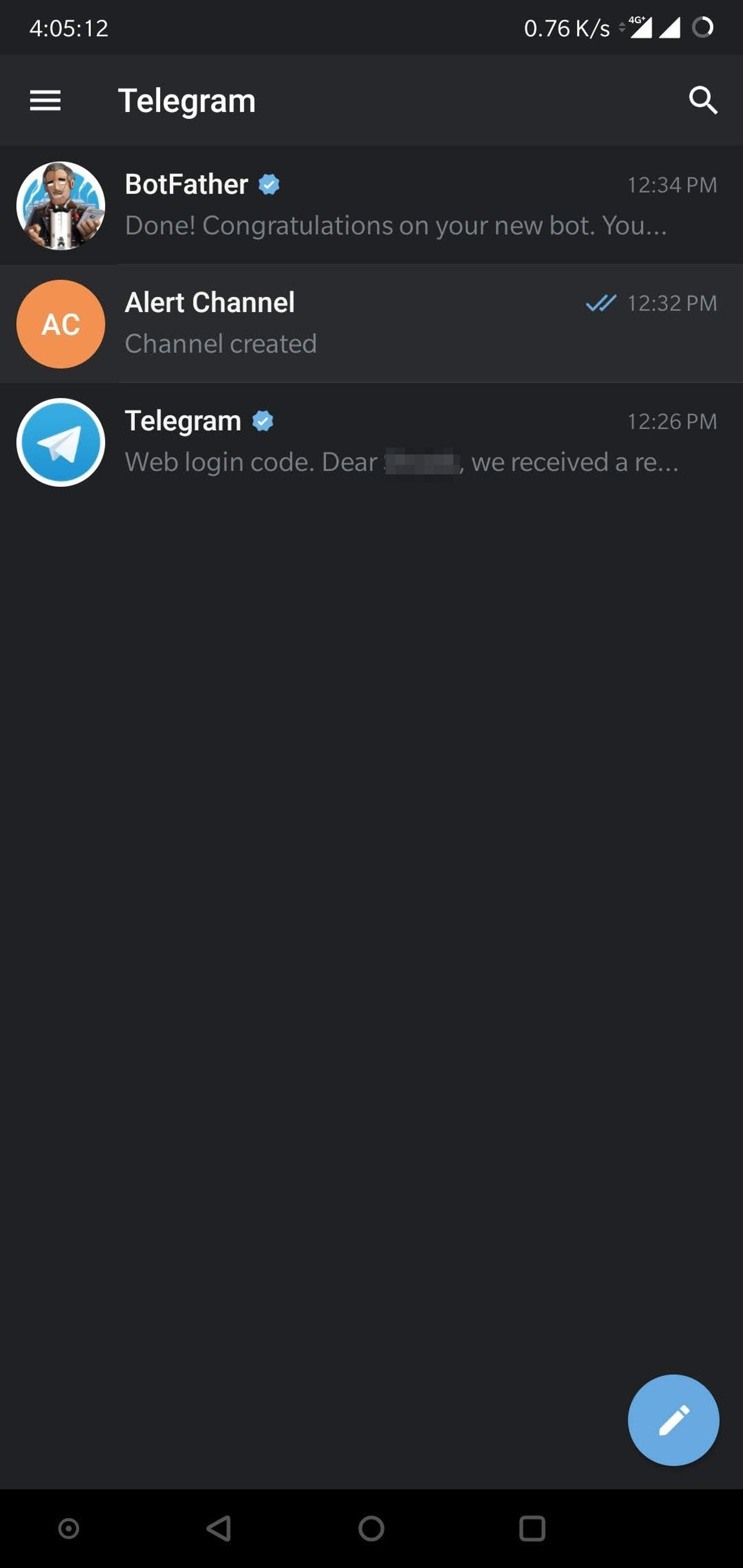
Ha instalado Telegram con éxito y configurado su cuenta. En las próximas lecciones, aprenderemos más sobre canales y bots.
Creación de un canal
¿Qué es un canal de Telegram?
Un canal es para Telegram lo que son los Grupos para Whatsapp. Los canales son una herramienta para transmitir sus mensajes a grandes audiencias. Pueden tener un número ilimitado de suscriptores, pueden ser públicos con una URL permanente y cada publicación en un canal tiene su propio contador de visitas.
Pasos para crear un canal
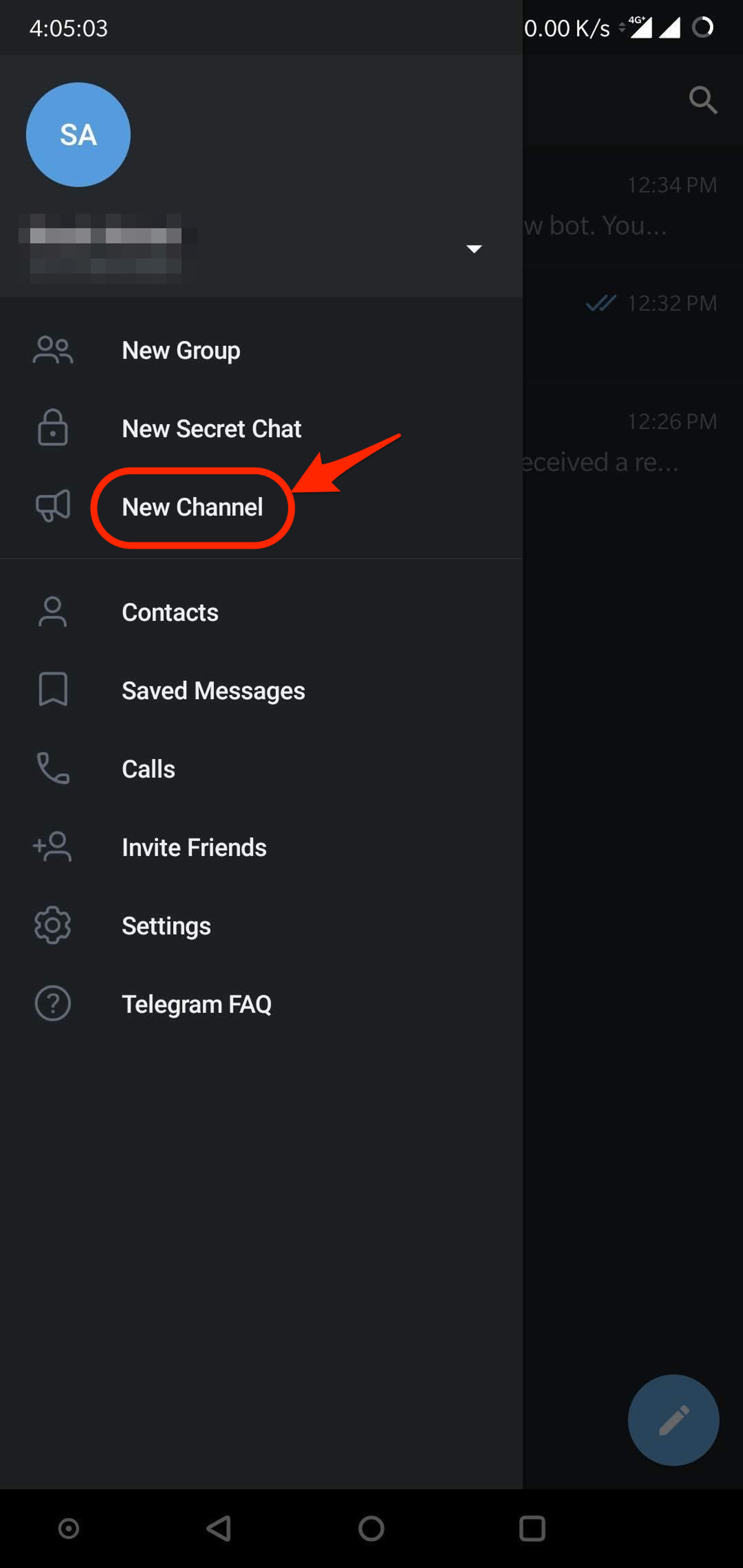
- Vaya a la pantalla de inicio de la aplicación Telegram.
- Desliza el dedo desde el lado izquierdo para mostrar el menú.
- Haga clic en "Nuevo canal".
- Te pedirá un nombre y una descripción para tu canal. Dé un nombre y una descripción adecuados. Agregar una foto es opcional.
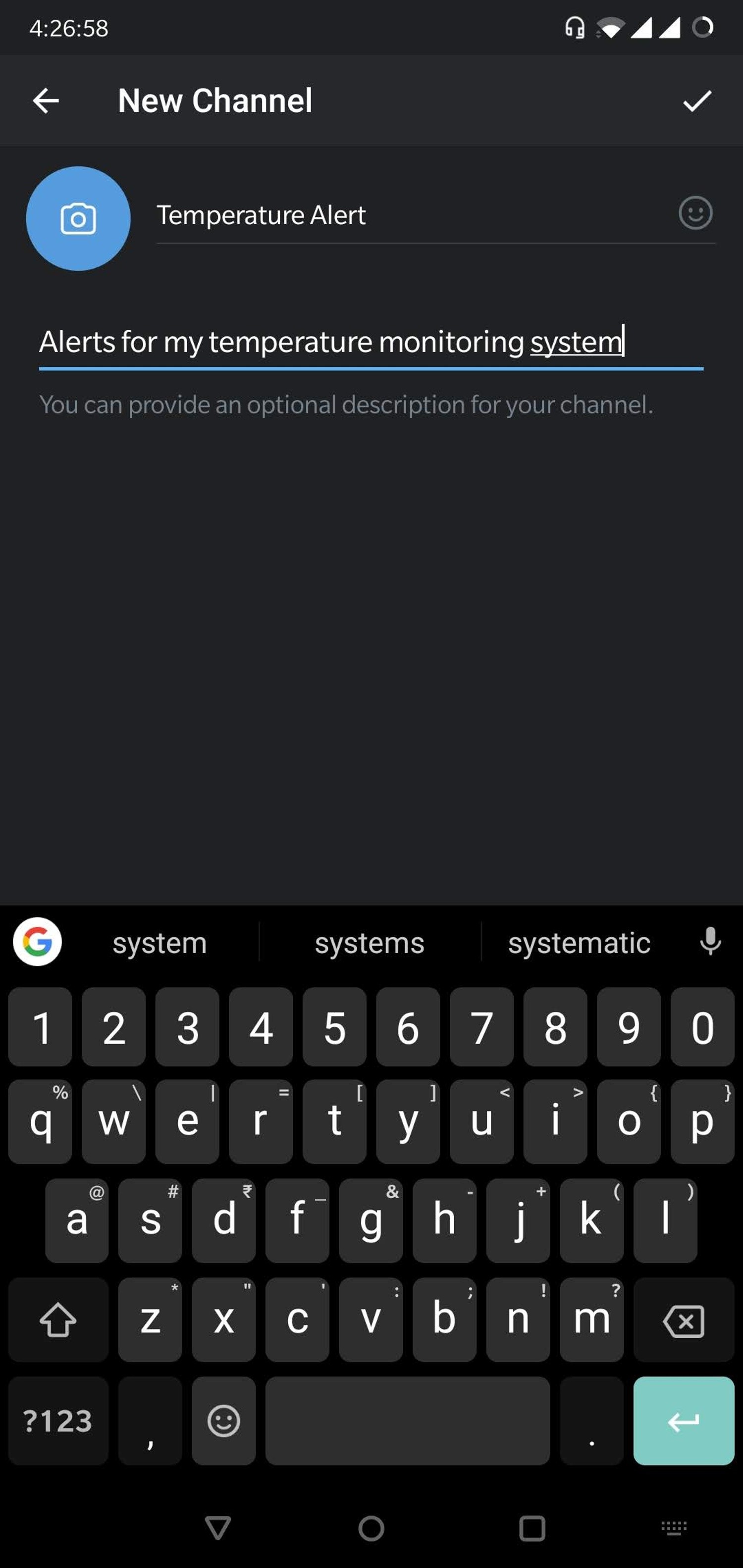
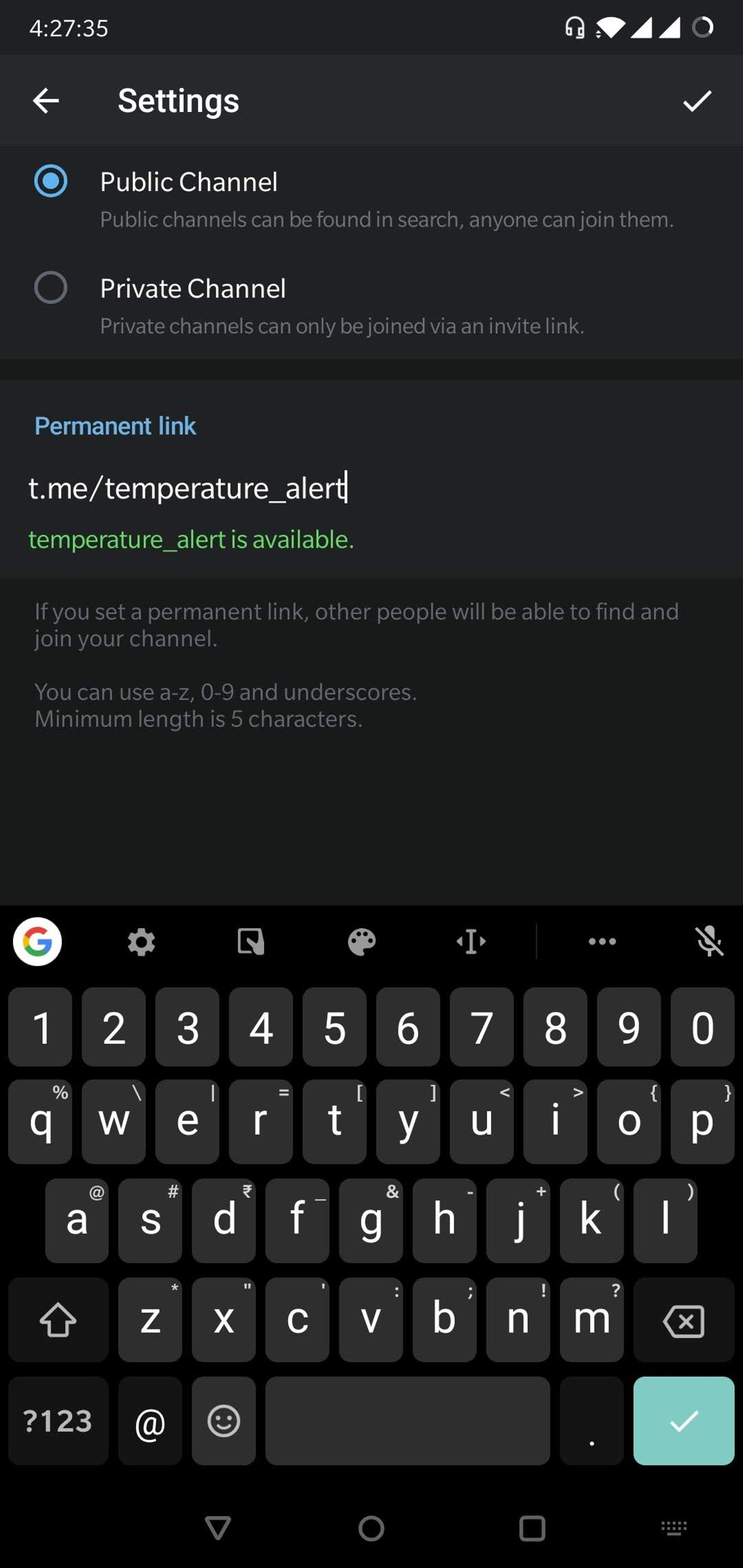
- En la siguiente pantalla, configure el canal como Público.
- En la misma pantalla, te pedirá que ingreses un enlace permanente para tu canal. Puede utilizar letras minúsculas y números del 0 al 9 para crear el enlace del canal.
- Tenga en cuenta que el nombre del enlace del canal es global y podrá crear un enlace del canal solo si el nombre del enlace está disponible. El nombre del enlace del canal es algo similar a una dirección de correo electrónico, es decir, solo puede existir un ID de correo electrónico único a la vez.
- Puede mantener el nombre del enlace del canal como temperature_alert_ seguido de su ID de correo electrónico. Por ejemplo, si mi ID de correo electrónico es [email protected], puedo mantener el nombre del enlace del canal como temperature_alert_developer_boltiot_com (Eliminé el símbolo @ y. Ya que no estaba permitido y lo reemplacé con un guión bajo _) . Es sólo una sugerencia. Puede mantener el nombre del enlace del canal como desee mientras sea válido.
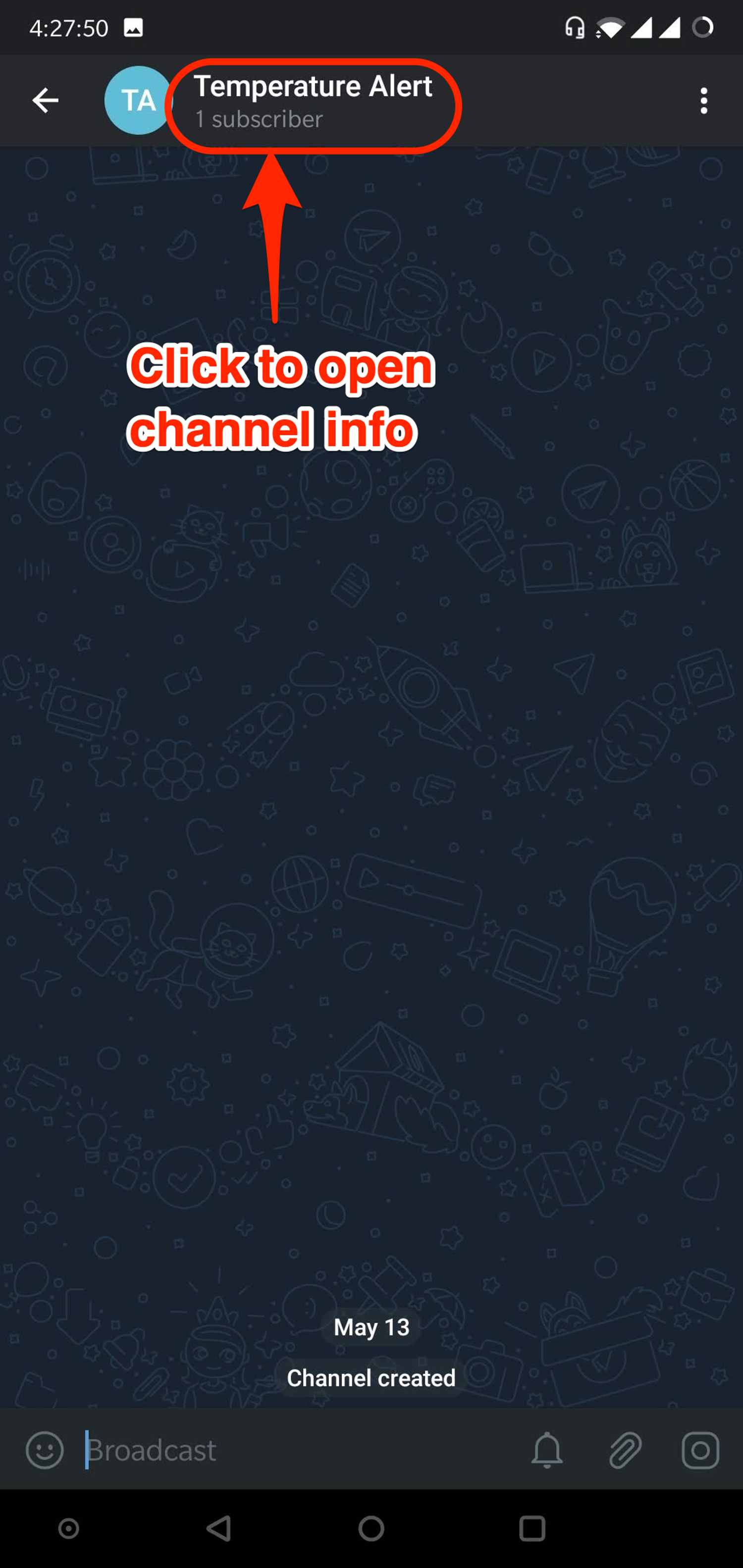
- Anota el nombre del enlace permanente de este canal. Más adelante será necesario enviar mensajes a este canal. Por ejemplo, el nombre del enlace del canal en la captura de pantalla siguiente es " temperature_alert ".
- ¡Felicitaciones! Ha creado un nuevo canal. También puede ver este canal desde la pantalla de inicio de su aplicación.

- Puede hacer clic en el nombre del canal en la parte superior para ver más detalles al respecto.
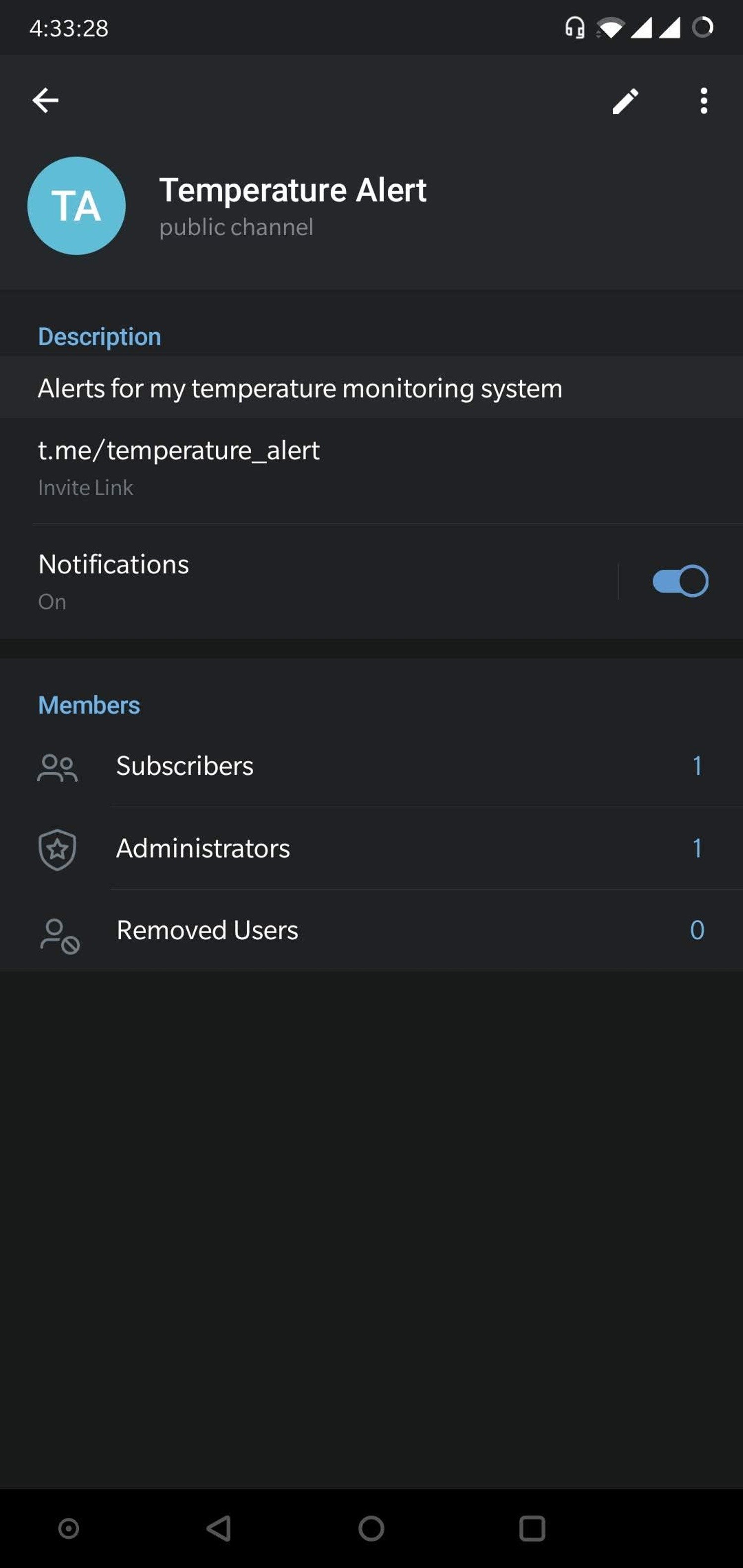
- A continuación, necesitaremos crear y agregar un Bot al canal para que pueda publicar alertas para nosotros en este canal.
Crea un bot
¿Qué es un bot?
Los bots son aplicaciones de terceros que se ejecutan dentro de Telegram. Los usuarios pueden interactuar con los bots enviándoles mensajes, comandos y solicitudes.
Usaremos Bots para enviar alertas en nuestro canal.
Crea un nuevo bot
Telegram nos permite crear un nuevo bot con la ayuda de un bot llamado "BotFather". Es un solo bot para crear y administrar otros bots.
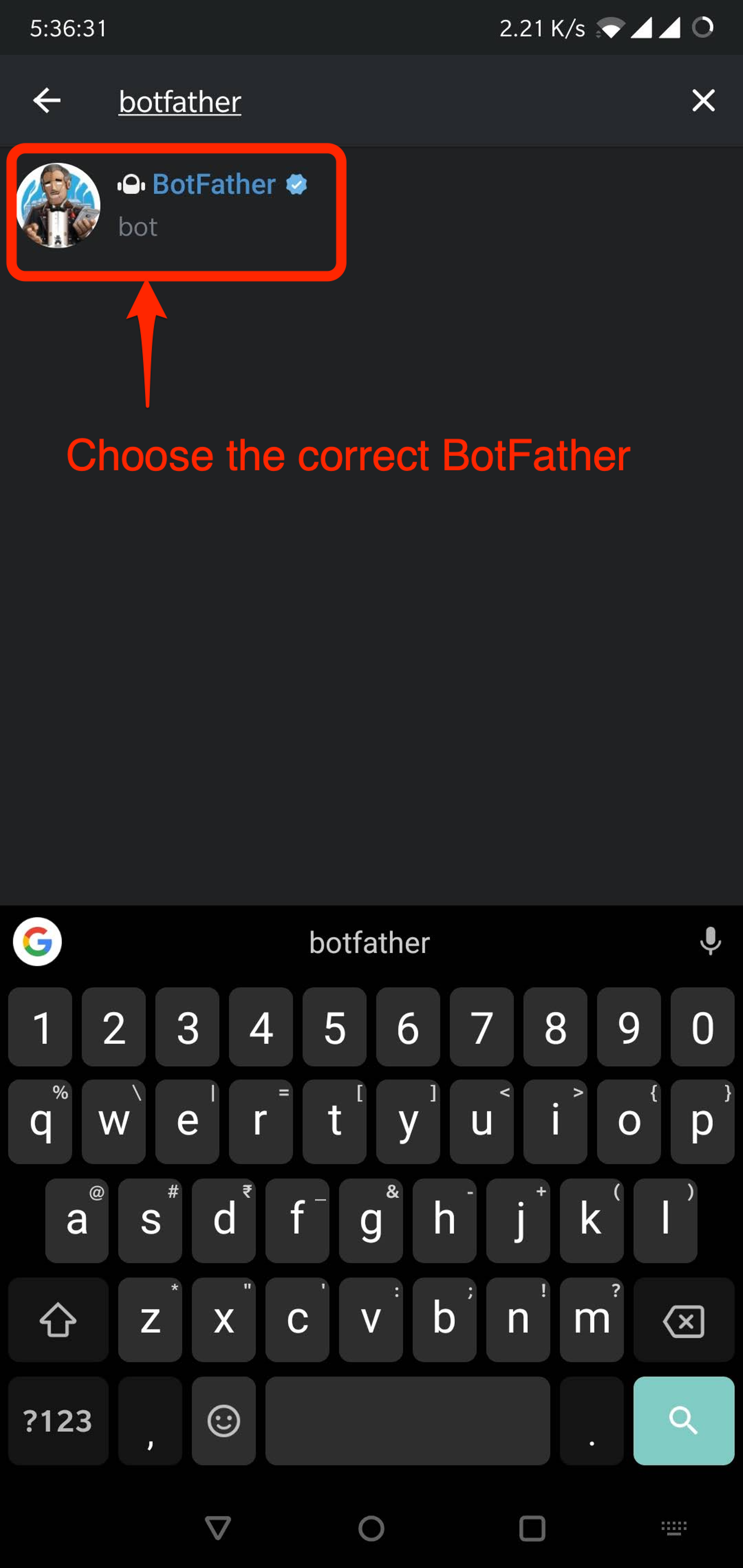
- En la pantalla de inicio de la aplicación, haga clic en el ícono de búsqueda en la parte superior derecha y escriba "botfather".
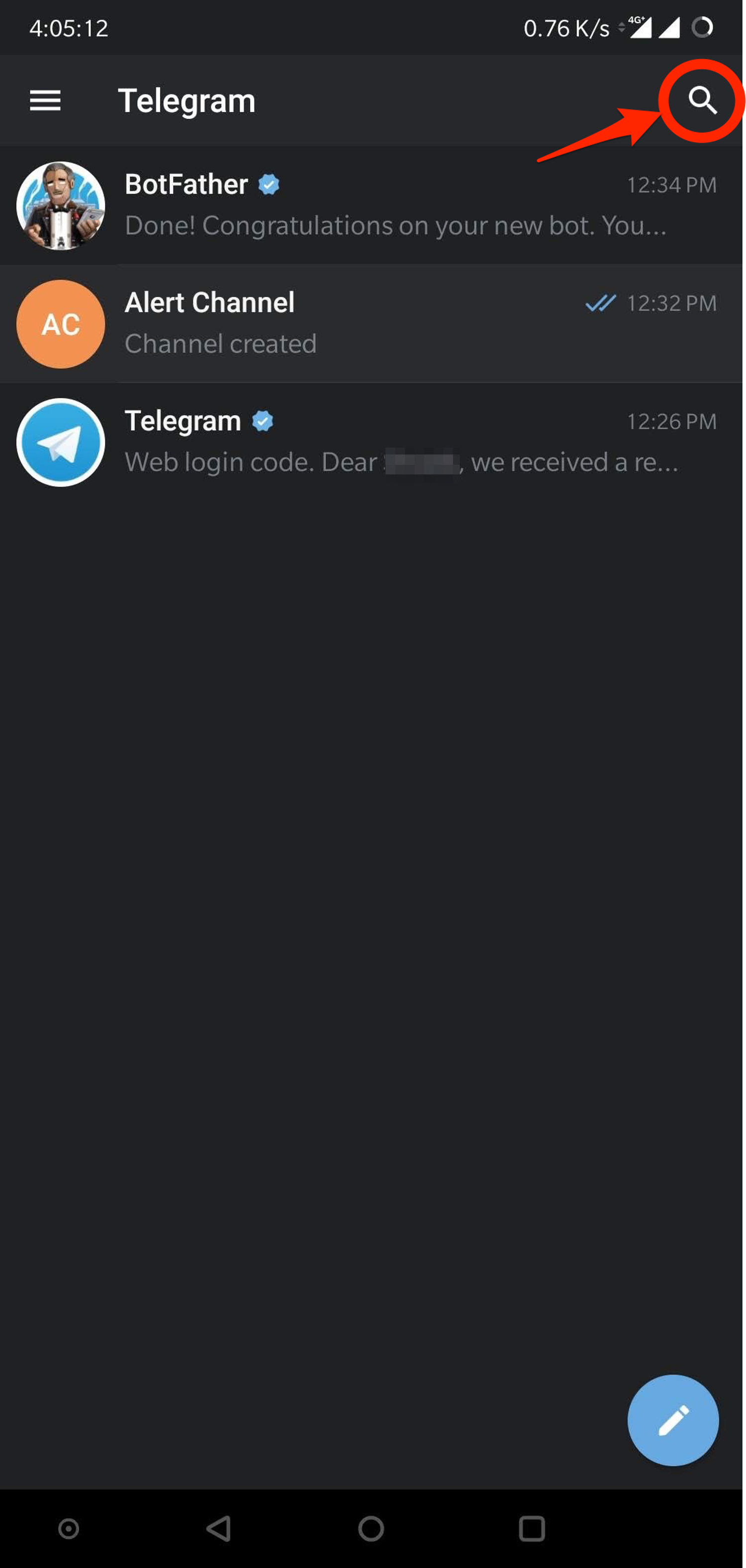
- En los resultados de la búsqueda, haga clic en el resultado correcto para "BotFather" como se muestra a continuación. El "BotFather" correcto tendrá una marca de verificación azul junto a su nombre. Esto lo llevará a una ventana de chat con el "BotFather".
- El chat ya tendrá algunos elementos y le mostrará una lista de comandos para comenzar.
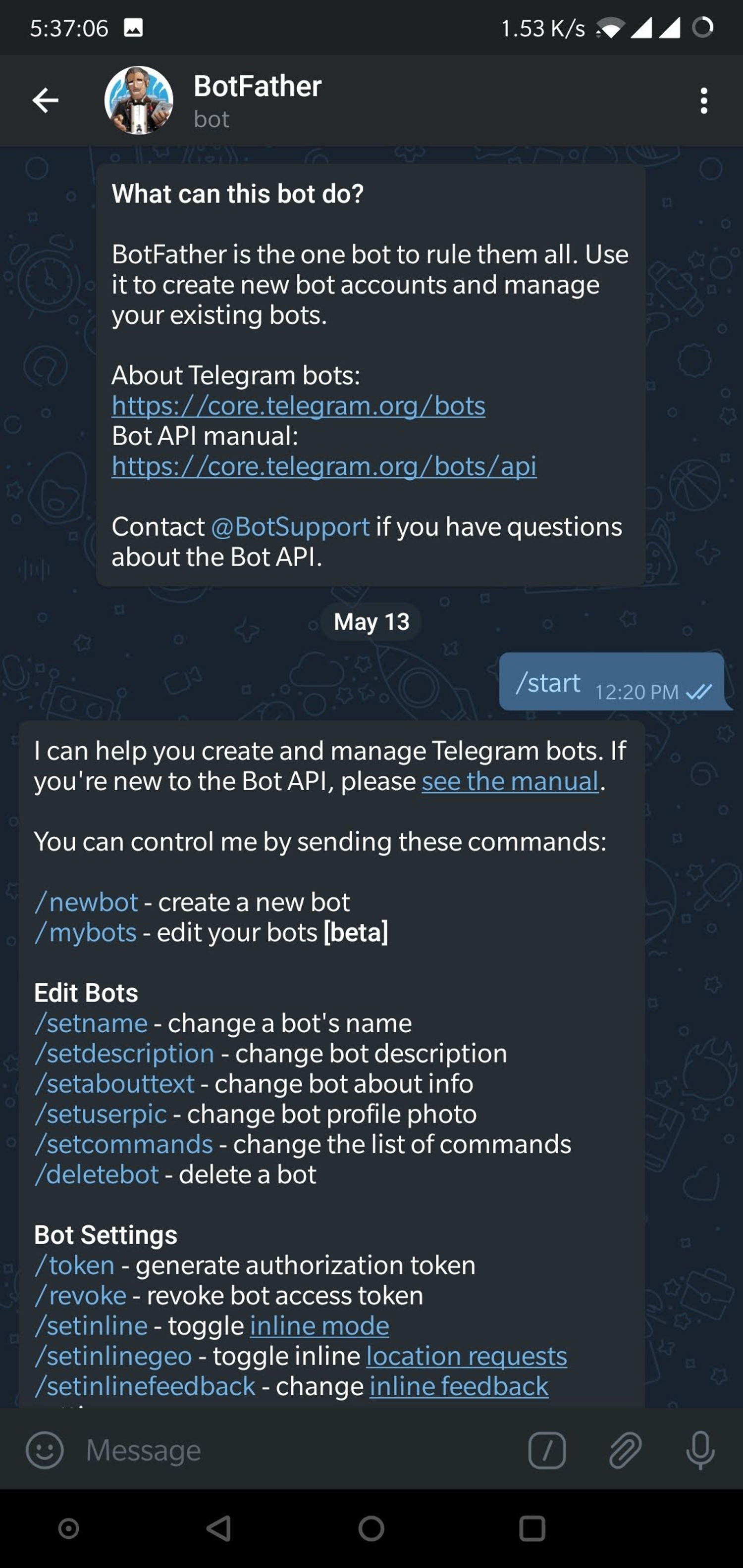
- Dado que necesitamos crear un nuevo Bot, escriba "/ newbot" en la ventana.
- Le pedirá que ingrese algunos detalles más, como el nombre del bot y el nombre de usuario del bot.
- Cuando su bot se cree con éxito, se le mostrará una pantalla similar a la que se muestra a continuación y contendrá el Bot Token. Este token se utiliza para controlar su Bot, así como para enviar mensajes en su nombre. Mantenga este token seguro, ya que permitirá que cualquier persona acceda a su bot.
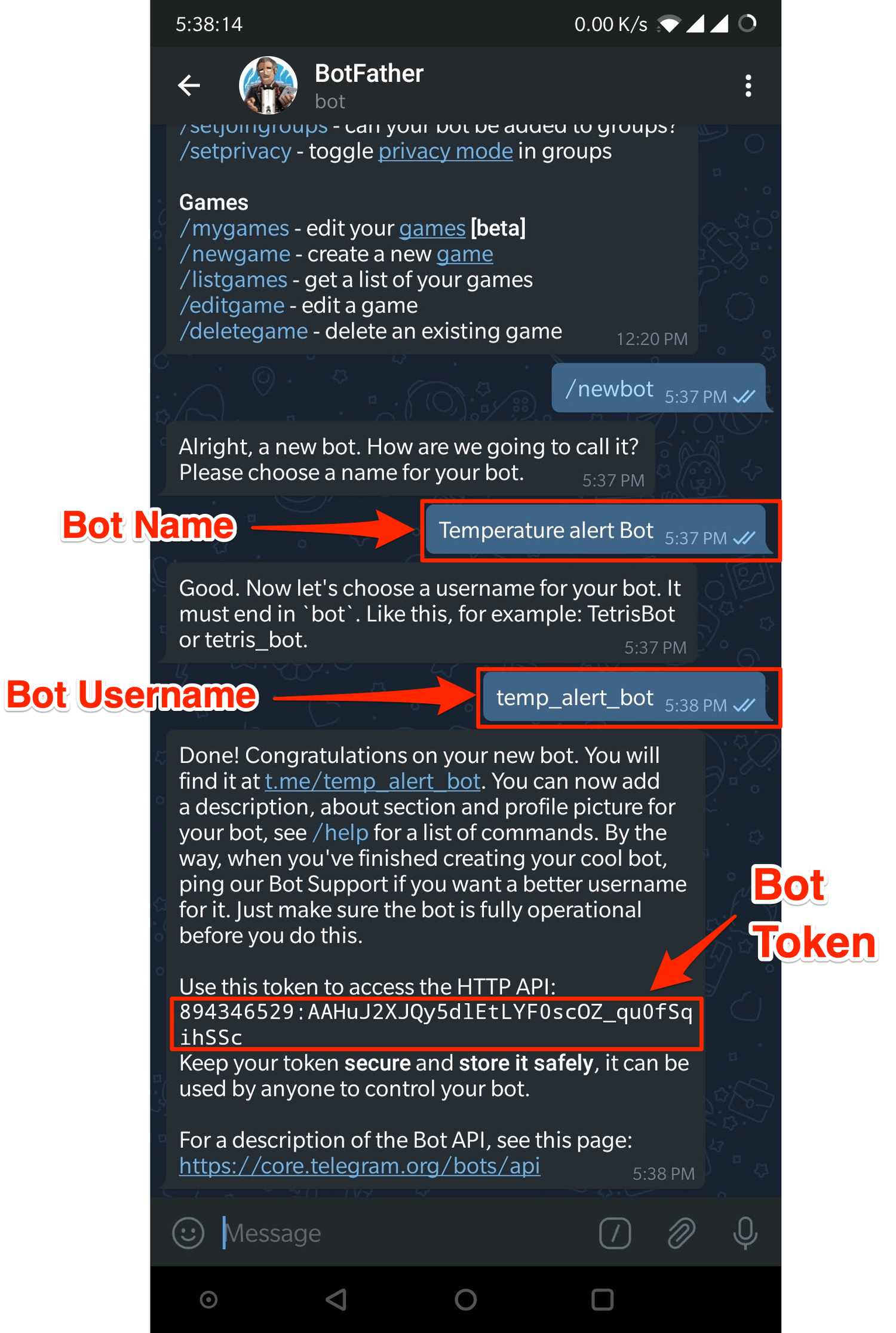
- En la captura de pantalla anterior, el token de Bot es "894346529:AAhuJ2XJQy5dlEtLYF0sc0Z_qu0fSqihSSc". Guárdelo como telegram_bot_id. El telegram_bot_id se guarda como "bot" seguido del token del bot. Entonces, en este ejemplo, el telegram_bot_id será "bot894346529:AAhuJ2XJQy5dlEtLYF0sc0Z_qu0fSqihSSc".
- Telegram_bot_id se usará en el código Python para enviar mensajes. El código Python se enseñará en las lecciones posteriores.
- Además, tenga cuidado al guardar el ID del bot. Puede confundirse entre 0 y O, I y 1, etc., ya que tienen un aspecto similar.
- Felicitaciones, ha creado un nuevo Bot. Ahora, necesitaremos agregarlo al canal que hemos creado previamente para que podamos enviar alertas.
Agrega el bot al canal
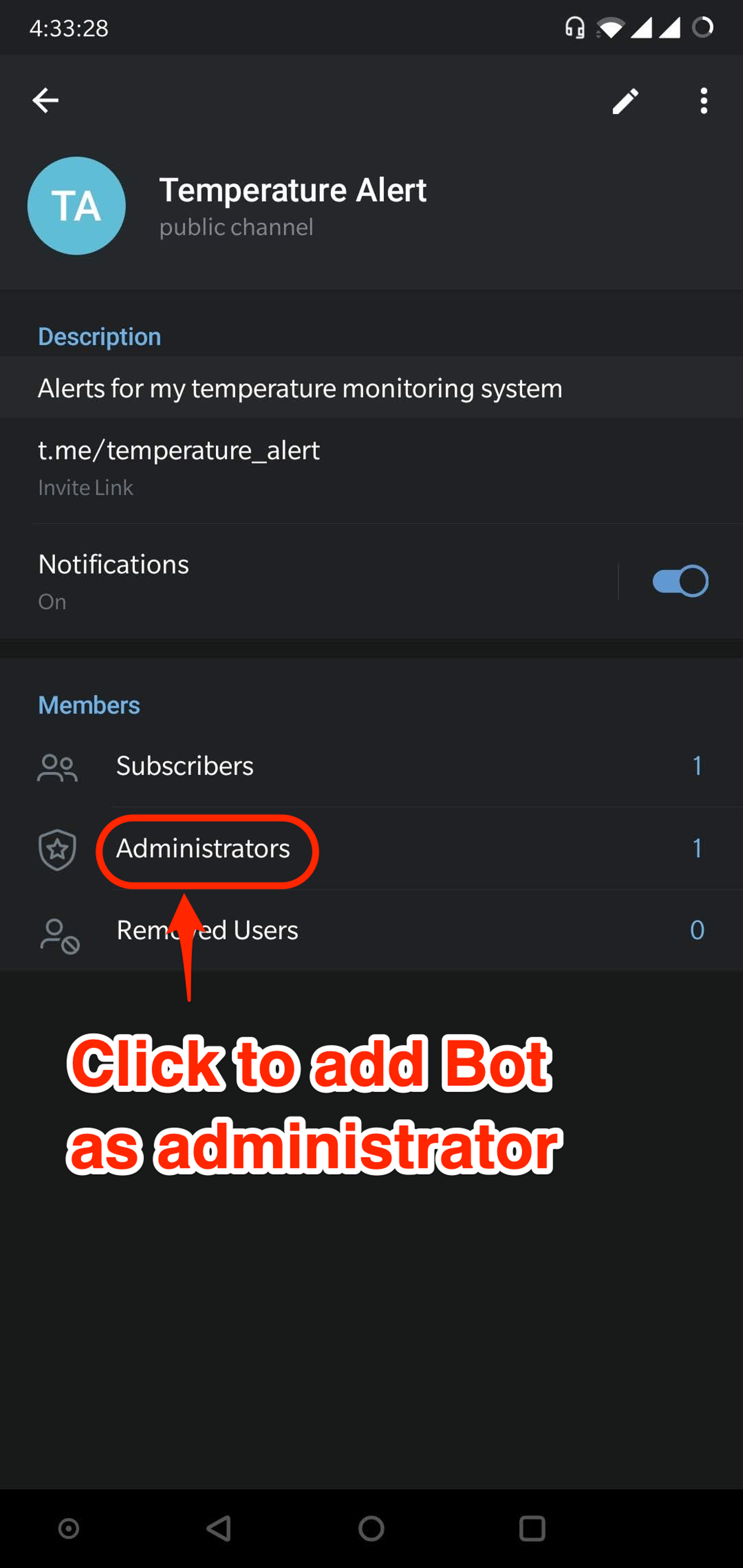
- Desde la pantalla de inicio de la aplicación, abra el canal que hemos creado anteriormente.
- En la pantalla, haga clic en el nombre del canal en la parte superior para abrir la información del canal.
- Haga clic en el botón Administradores para que podamos agregar el bot recién creado al canal.
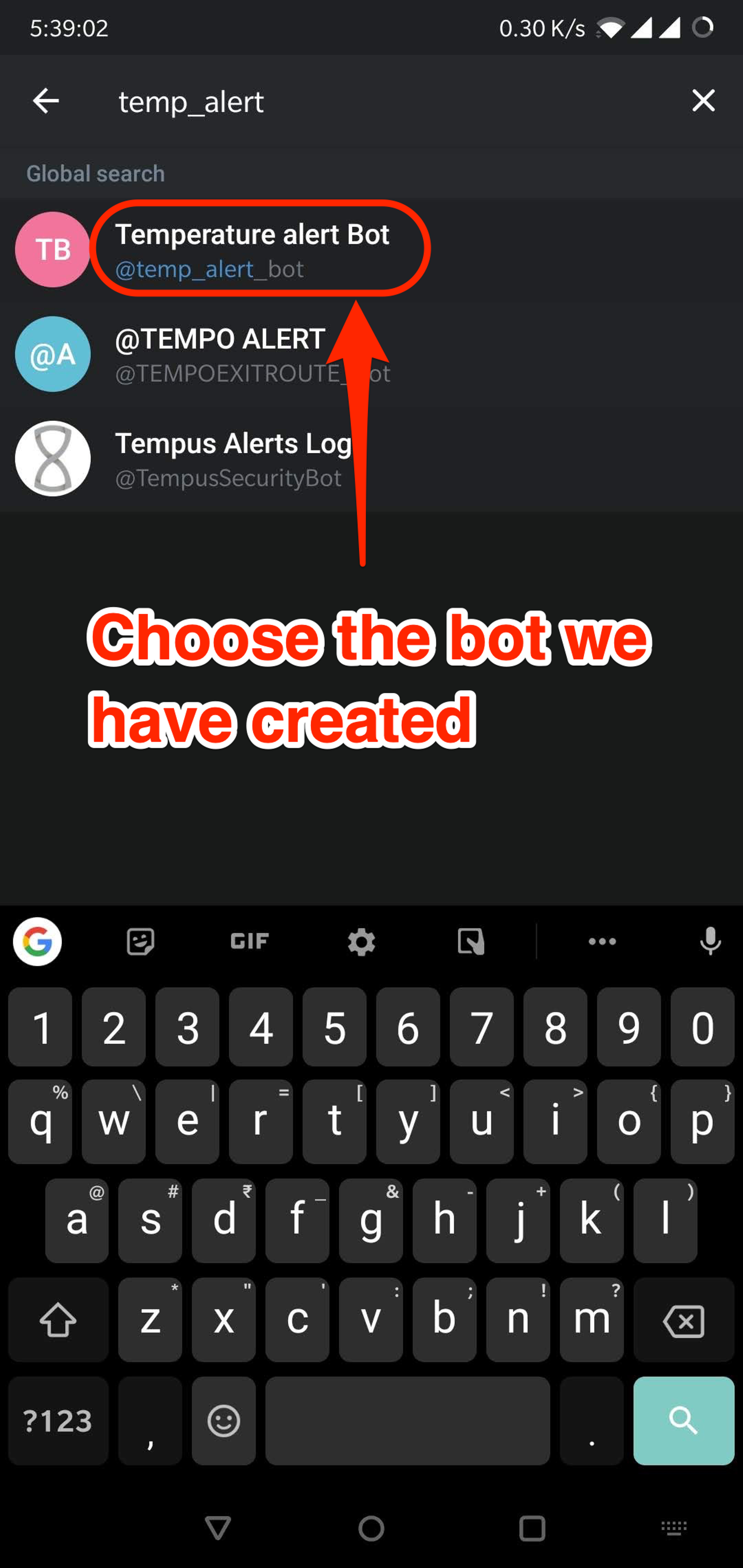
- Busque el bot que hemos creado con el nombre de usuario del Bot. Una vez que haya encontrado el Bot correcto, haga clic en él para agregarlo al canal. Asegúrate de haber hecho clic en el botón Administradores en el paso anterior, ya que esto permitirá que nuestro bot publique en el canal.
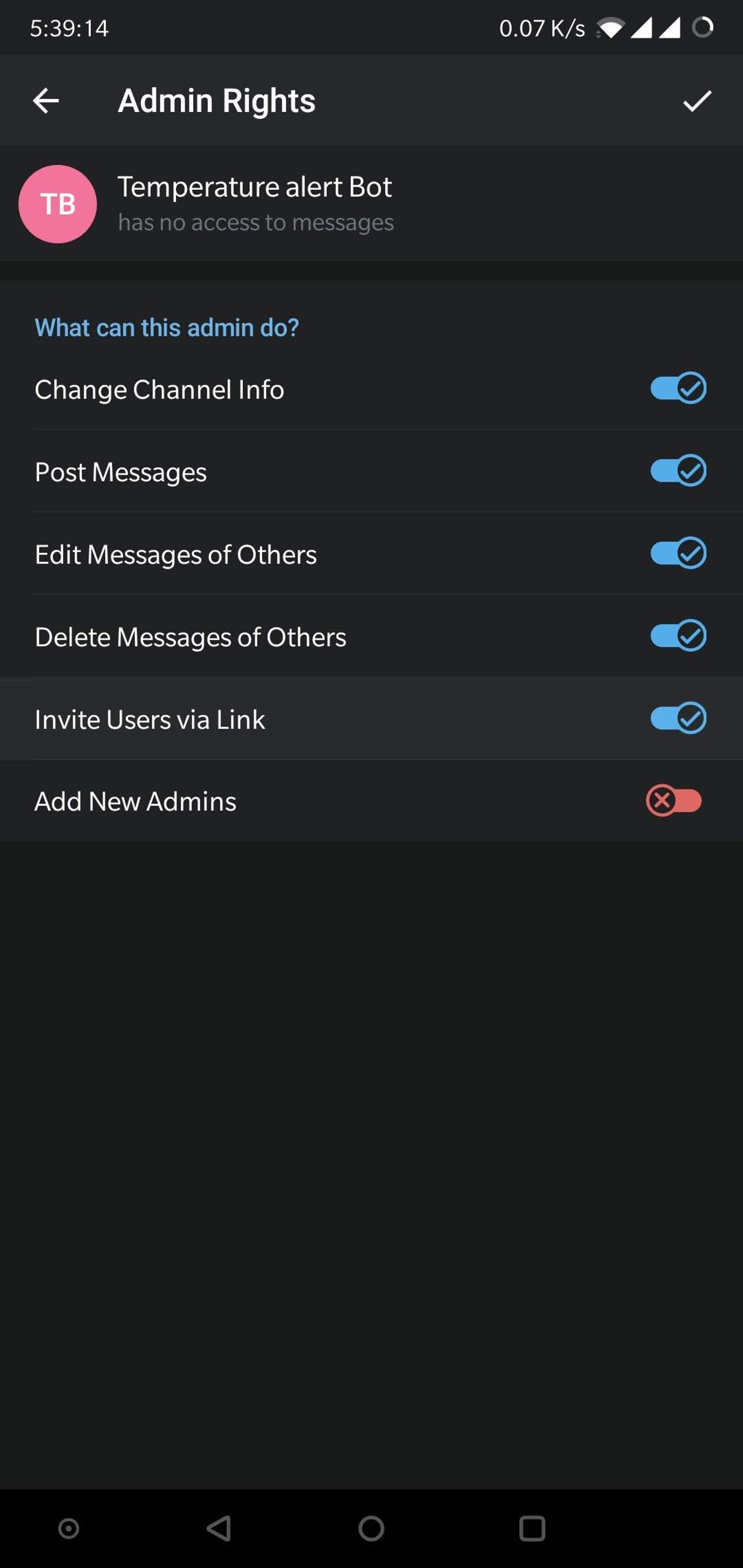
- Se le pedirá que confirme los derechos del bot. Presione en la marca de verificación en la parte superior derecha para continuar agregando el bot al canal. Asegúrate de que el bot tenga los derechos para "Publicar mensajes".
- Ahora verá el Bot recién creado en la lista de administradores del canal.
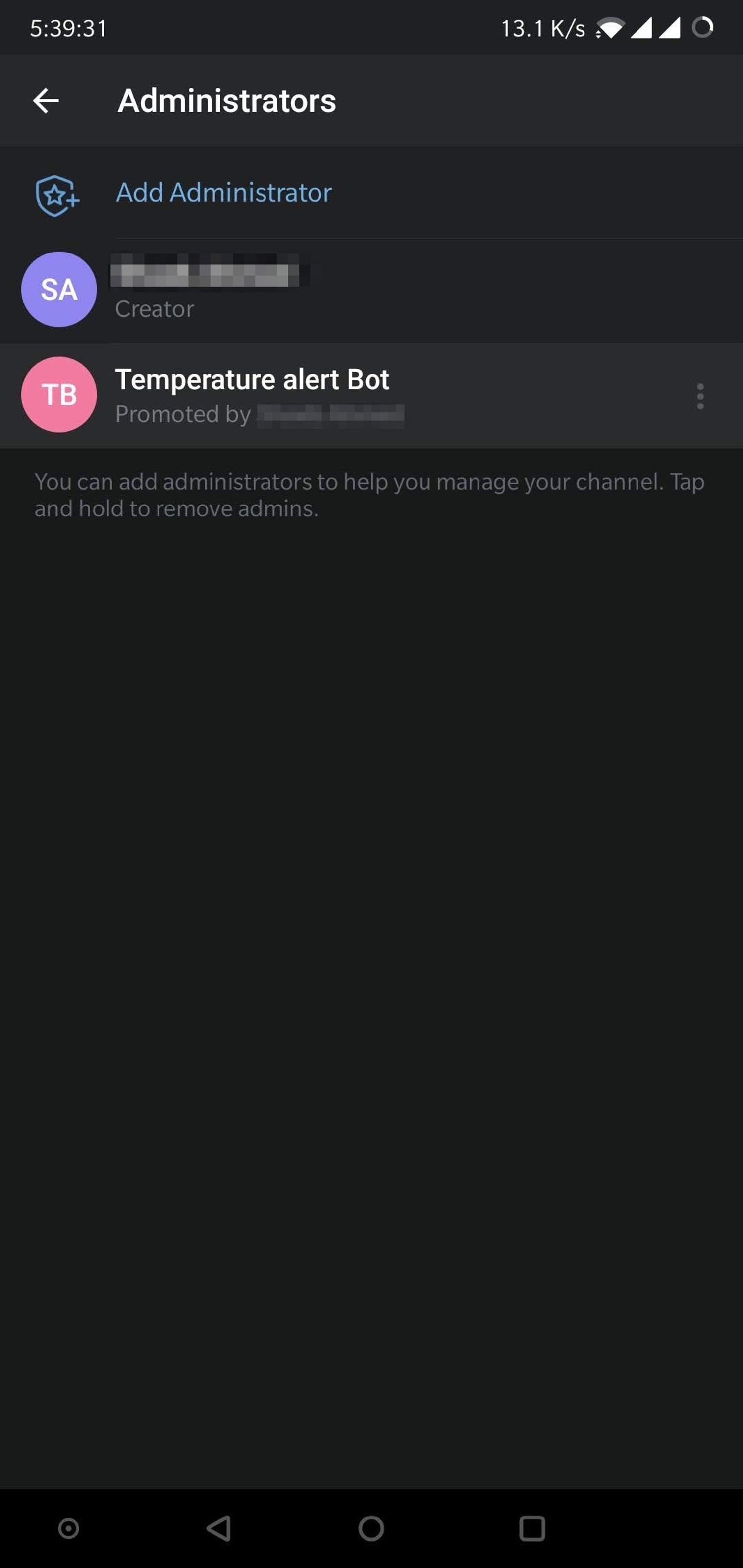
- Ahora codificaremos para enviar mensajes al canal a través del Bot.
AHORA CONFIGURANDO LA RED PARA TWILLO Y MAIL GUN
Reciba los valores del sensor de temperatura LM35 a través de SMS y correo electrónico en cualquier momento en su teléfono móvil con el Asistente de Google.

¿Qué hace cuando necesita verificar los valores de los sensores de su proyecto Iot en cualquier momento? Simplemente inicie sesión en su nube para verificarlo. Parece simple, ¿verdad? Pero, ¿qué pasaría si tuviera que verificar los valores una vez cada hora o una vez cada pocos minutos y eso muchas veces al día? Eso sería un poco (muy) engorroso, ¿verdad? Ahora, imagine un mundo en el que pueda obtener los valores del sensor a través de SMS y correo electrónico con solo decir "Envíeme los valores del sensor" a su Asistente de Google. Espera espera espera. Esa situación ya no es imaginaria porque ustedes mismos podrían hacerlo en unos pocos pasos. Siga leyendo para averiguarlo.
En este proyecto, recibiremos los valores del sensor de temperatura del sensor LM35 a través de SMS y correo electrónico a través de un comando al Asistente de Google.
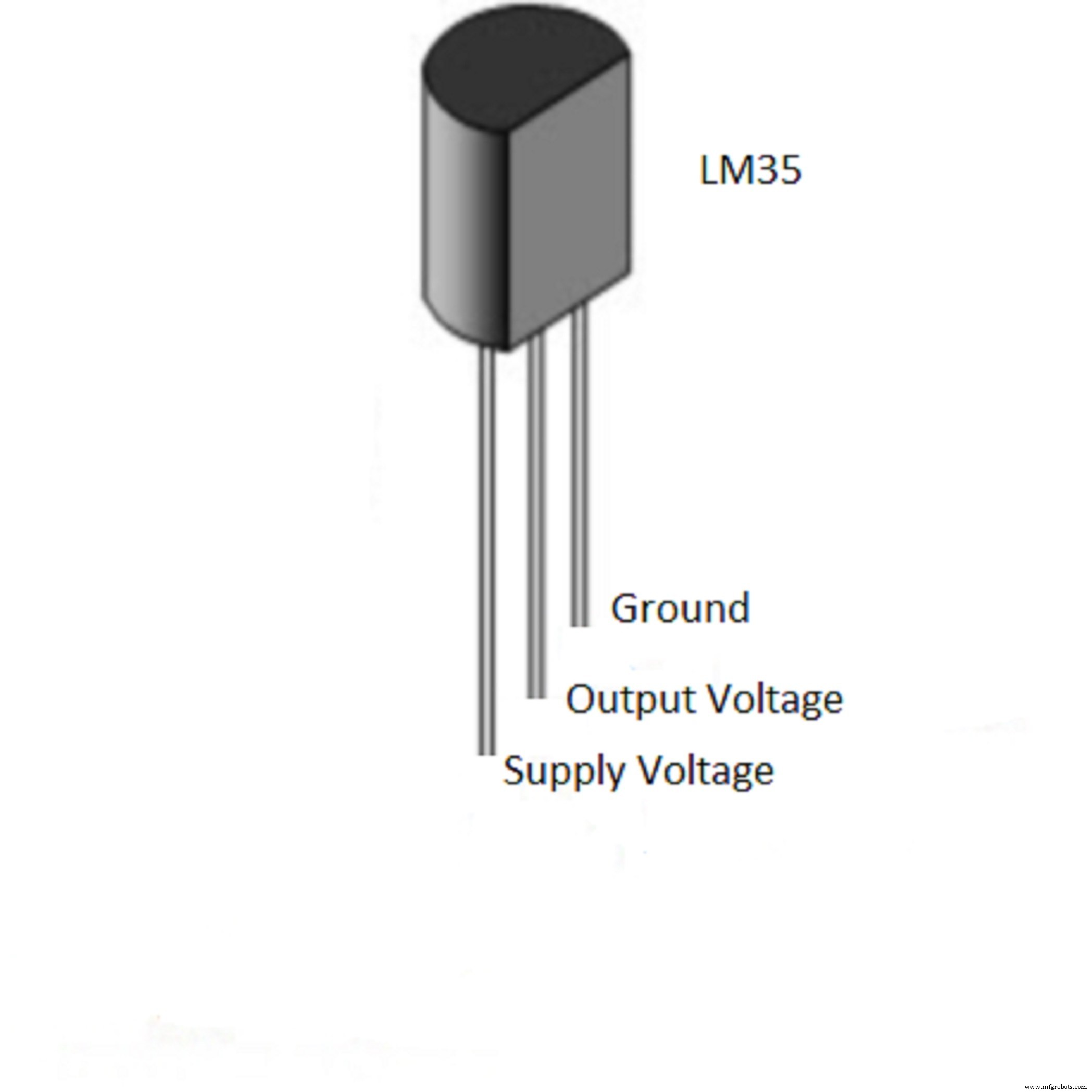
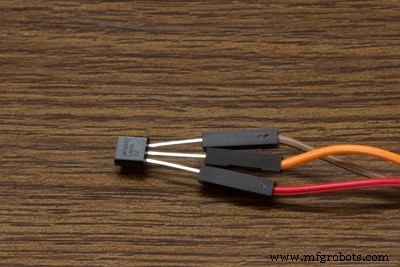
Paso 1:configuración del hardware
Sostenga el sensor LM35 en su mano de manera que pueda ver el nombre. Los tres pines, de izquierda a derecha, son VCC, salida y GND. Conecte los tres pines a los cables hembra a macho. Conecte los tres cables, correspondientes a los tres pines de izquierda a derecha, a los pines 5 V, A0 y GND del módulo WiFi Bolt. Conecte el módulo WiFi a una fuente de alimentación de 5 V. Asegúrese de que esté conectado a una conexión a Internet activa.
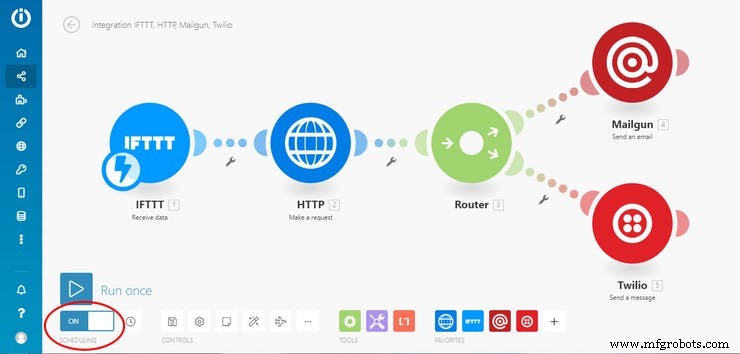
Paso 2:Creación de un módulo IFTTT en Integromat
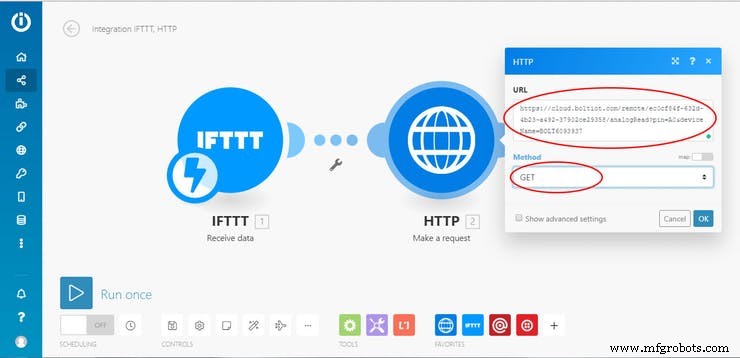
Inicie sesión en su cuenta Integromat. Si no se ha registrado en Integromat, puede crear una cuenta haciendo clic aquí. Después de iniciar sesión, haga clic en "Crear un nuevo escenario" en la parte superior derecha de la pantalla. Seleccione IFTTT, HTTP, Mailgun y Twilio en la pantalla para seleccionar las herramientas necesarias y luego haga clic en "Continuar". Luego haga clic en el círculo blanco y seleccione IFTTT de la lista y luego seleccione "Recibir datos" en el menú. Este módulo es esencial para conectarlo al Applet en IFTTT que se discutirá más adelante. Haga clic en "Agregar" para agregar un nuevo Webhook seguido de darle un nombre adecuado y haga clic en "Guardar". Ahora, obtendrá una URL o un enlace. Guárdelo para otro propósito.

Paso 3:Creación de un módulo HTTP en Integromat
A continuación, haga clic en el símbolo "+" adjunto al módulo para agregar un nuevo módulo. Seleccione "HTTP" seguido de "Realizar una solicitud". Esto es necesario para recibir los valores del sensor de Bolt Iot Cloud. En la URL, pega el enlace https://cloud.boltiot.com/remote/your-bolt-iot-api-key/analogRead?pin=A0&deviceName=BOLTXXXXXXX. Reemplace "your-bolt-iot-api-key" y "BOLTXXXXXXX" con sus respectivas credenciales que puede encontrar fácilmente en su Bolt Iot Cloud. Deje que el método sea "OBTENER" y haga clic en "Aceptar".
El enlace anterior se utiliza para obtener los valores del sensor de Bolt Iot Cloud. La salida del enlace anterior tendrá la forma de {"valor":"XXX", "éxito":"1"} donde XXX son los valores del sensor.
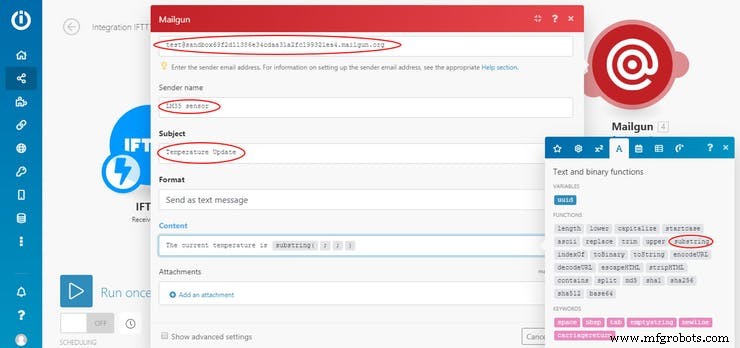
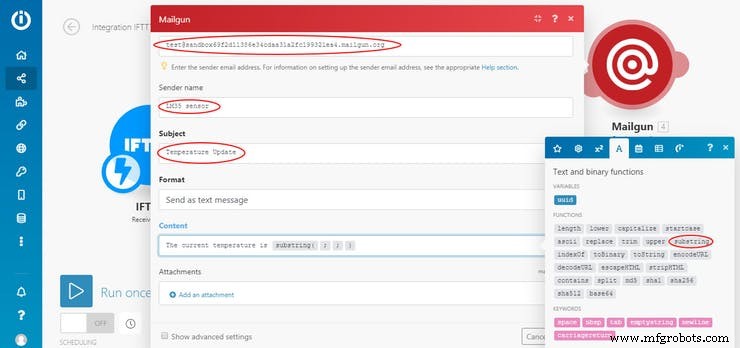
Paso 4:Creación de un módulo Mailgun en Integromat
Ahora, haga clic nuevamente en "+" y escriba "Control de flujo" en el cuadro de búsqueda y selecciónelo seguido de "Enrutador". Deben hacerse dos círculos blancos. Haga clic en el primer círculo blanco y seleccione "Mailgun" seguido de "Enviar un correo electrónico". Aquí, Mailgun se utiliza para recibir el correo electrónico con la temperatura. Si ya tiene una cuenta en Mailgun, debe tener la clave API y el nombre de dominio que se pueden encontrar fácilmente en su cuenta de Mailgun. Si no tiene una cuenta en Mailgun, puede seguir el paso alternativo que se indica a continuación. Complete los detalles requeridos según se le solicite. Escriba el correo del destinatario (que es su dirección de correo electrónico). En el campo "Remitente", escriba "test @ yourdomainname". En la sección "Contenido", debemos escribir el valor de temperatura y no el valor del sensor. Para convertir el valor de temperatura al valor del sensor, necesitamos dividir el número por 10,24. Para obtener el valor del sensor en la forma XXX, necesitamos eliminar todos los demás caracteres para los que usamos la función "subcadena". Haga clic en el símbolo "A" en el cuadro de diálogo al lado y seleccione "subcadena".
En el primer espacio dentro de los corchetes, haga clic en la opción "Datos" debajo del símbolo de estrella seguido de "11" y "14" en el segundo y tercer espacio. Estrictamente hablando, este no es el método correcto para obtener el valor del sensor, así que estoy usando un truco para obtenerlo. Si alguien conoce la forma correcta, puede mencionar el método en la sección de comentarios a continuación.
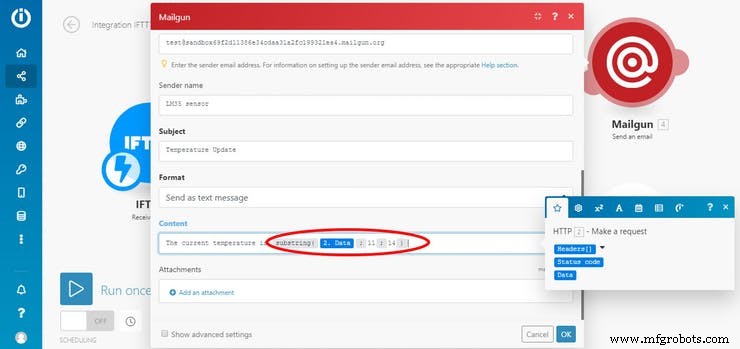
Esto último se hace para capturar solo el "XXX" de la salida. Luego, este número se divide por 10,24

Before saving the scenario, don't forget to switch on the "Scheduling" which is at the bottom of the screen and select the "Run scenario" as "Immediately". Your final scenario should look like this.
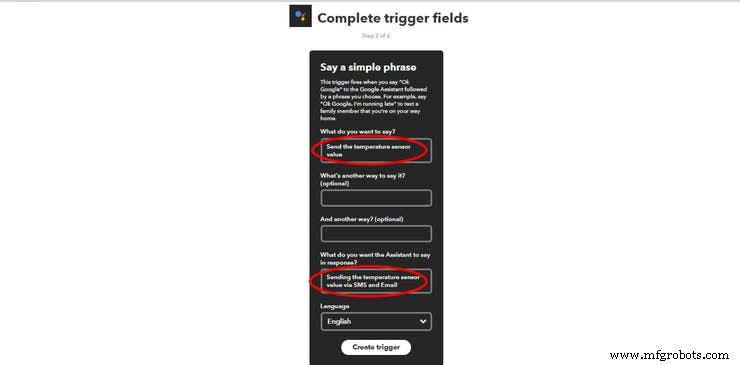
Step 6 :Making a new Applet in IFTTT
Login to your IFTTT account. If you haven't signed up on IFTTT, then you can create an account by clicking here. After logging in, click on "New Applet" under the "My Applets" section. Click on "+this" followed by "Google Assistant" after searching for it in the search box. Click on "Say a simple phrase" in the following screen. Type the command for which you want to trigger the required action.
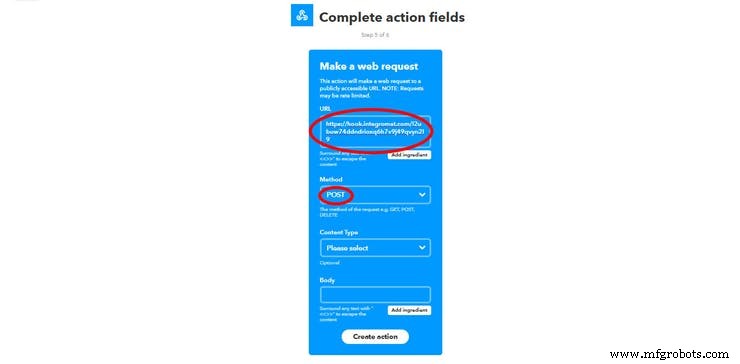
Click on "Trigger" followed by "+that". Search for "Webhooks" in the search box and select it followed by selecting "Make a web request" in the following screen. In the URL field, paste the link which we got in Step 2 after creating an IFTTT module in Integromat. This step is very essential to run the scenario in Integromat when you say the command to Google Assistant. Afterwards, select "POST" in method and click on "Create Action". Write a suitable name for the applet and select "Finish".
Eso es. Now see the magic when you take out your mobile phone and say "Ok Google, send the temperature sensor value."
Schematics
Connecting female-to-male wires to LM35 sensor
Connecting female-to-male wires to the Bolt WiFi module
Final connection

THAT'S IT NOW UPLOAD EVERY THING AND THEN CHECK.
IF ANY DOUBTS CONTACT ME BY COMMENT SECTION.
THANK YOU....................................
Código
- FINAL RECEIVER
- FINAL TRANSMITER
FINAL RECEIVERArduino
#include#include #include #include #include #include Servo servo;RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int servo_pin =9;int sensor_pin=A0;int output_value;void setup() { Serial.begin(9600); radio.begin(); servo.attach (servo_pin ); radio.openReadingPipe(0, address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.startListening();}int pos;void loop() { if (radio.available()) { radio.read(&pos, sizeof(pos)); Serial.println(pos); if(pos==100) { digitalWrite(6,LOW); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite (3, BAJO); // Serial.println("gk0"); } else if (pos==200){ digitalWrite(6,HIGH); digitalWrite(5,LOW); digitalWrite(4,HIGH); digitalWrite (3, BAJO); retraso (10); // Serial.println("gk1"); } else if (pos==300){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); digitalWrite(4,LOW); digitalWrite(3,HIGH); retraso (10); // Serial.println("gk2"); } else if (pos==400){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); digitalWrite(4,HIGH); digitalWrite (3, BAJO); retraso (10); // Serial.println("gk3"); } else if (pos==500){ digitalWrite(6,HIGH); digitalWrite(5,LOW ); digitalWrite(4,LOW); digitalWrite(3,HIGH); retraso (10); // Serial.println("gk5"); } else if (pos==600){ servo.write(90); retraso (10); // Serial.println("gk6"); } else if (pos==700){ servo.write(180); retraso (10); // Serial.println("gk7"); } } else { Serial.println("connection lost"); }}
FINAL TRANSMITERArduino
#include#include #include #include #include RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int x_key =A1; int y_key =A0; int p_key =A3; int q_key =A2; int x_pos;int y_pos;int p_pos;int q_pos;void setup() { radio.begin(); radio.openWritingPipe(address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.stopListening(); Serial.begin (9600); pinMode (x_key, INPUT); pinMode (y_key, INPUT); pinMode (p_key, INPUT); pinMode (q_key, INPUT); }int pos;void loop() { x_pos =analogRead (x_key); y_pos =analogRead (y_key); p_pos =analogRead (p_key); q_pos =analogRead (q_key); Serial.println(x_pos); Serial.println(y_pos); Serial.println(p_pos); Serial.println(q_pos); if (p_pos>400 &&p_pos<600 &&q_pos>400 &&q_pos<600) { if(x_pos>400 &&x_pos<600 &&y_pos>400 &&y_pos<600) { pos=100; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos<400) { pos=200; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos>600) { pos=300; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos<400) { pos=400; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos>600) { pos=500; radio.write(&pos, sizeof(pos)); } Serial.println(pos); delay(100);}else if(p_pos<400 || p_pos>600){ if(p_pos<400) { pos=600; radio.write(&pos, sizeof(pos)); } if(p_pos>600) { pos=700; radio.write(&pos, sizeof(pos)); } delay(100);}}
Esquemas
Proceso de manufactura