


¡Robot humanoide hecho a mano avanzado de código abierto MIA-1!
Componentes y suministros
 |
| × | 1 | |||
| × | 8 | ||||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Hola a todos, hoy les mostraré cómo hice el robot MIA-1, que no solo es avanzado y único, sino que también es de código abierto y se puede hacer sin impresión 3D. Sí, lo entendiste, este robot está completamente hecho a mano. Y código abierto significa: obtienes los códigos y todos los detalles gratis , usted también puede hacer este robot si lo desea.
Aquí solo vemos su discurso, ¡pero hay muchas más cosas que puede hacer!
Estas son las cosas que puede hacer:
- Puede escucharle y responderle
- Puede verte y reconocerte usando la cámara de su ojo izquierdo
- Puede detectar movimiento y capturar fotografías
- Tiene una GUI con pantalla LCD táctil para controlarla
- Muestra imágenes en su pantalla LCD
- Descargar imágenes y programas en su pantalla
- Puede apuntar a objetos usando un puntero láser en su mano derecha
- Mueve las manos mientras habla
- Se pone de pie sin la ayuda de otros
- Ella también puede hacer una reverencia (ver el video)
- ¡Y muchos más!
Suministros:
Para hacer este robot, utilicé todas las cosas que están disponibles en nuestra tienda local.
Microcontroladores + Computadoras (el cerebro):
- Arduino Mega (para controlar los servomotores)
- Una computadora completa (puedes usar Raspberry Pi, pero yo usaré mi computadora portátil como su cerebro inicialmente)
Servomotores:
MIA-1 tiene 13 grados de libertad.
- LDX227 servomotores de doble eje 8x
- Servomotores MG996r / MG996 3x
- Para los figers, he usado micro servo sg90
Tenga en cuenta que agregué una garra robótica y usa otro servomotor MG996r.
Y cables de puente, etc.
Visión:
Para el procesamiento de imágenes, como tomar fotos y detectar rostros, etc. He usado una cámara USB .
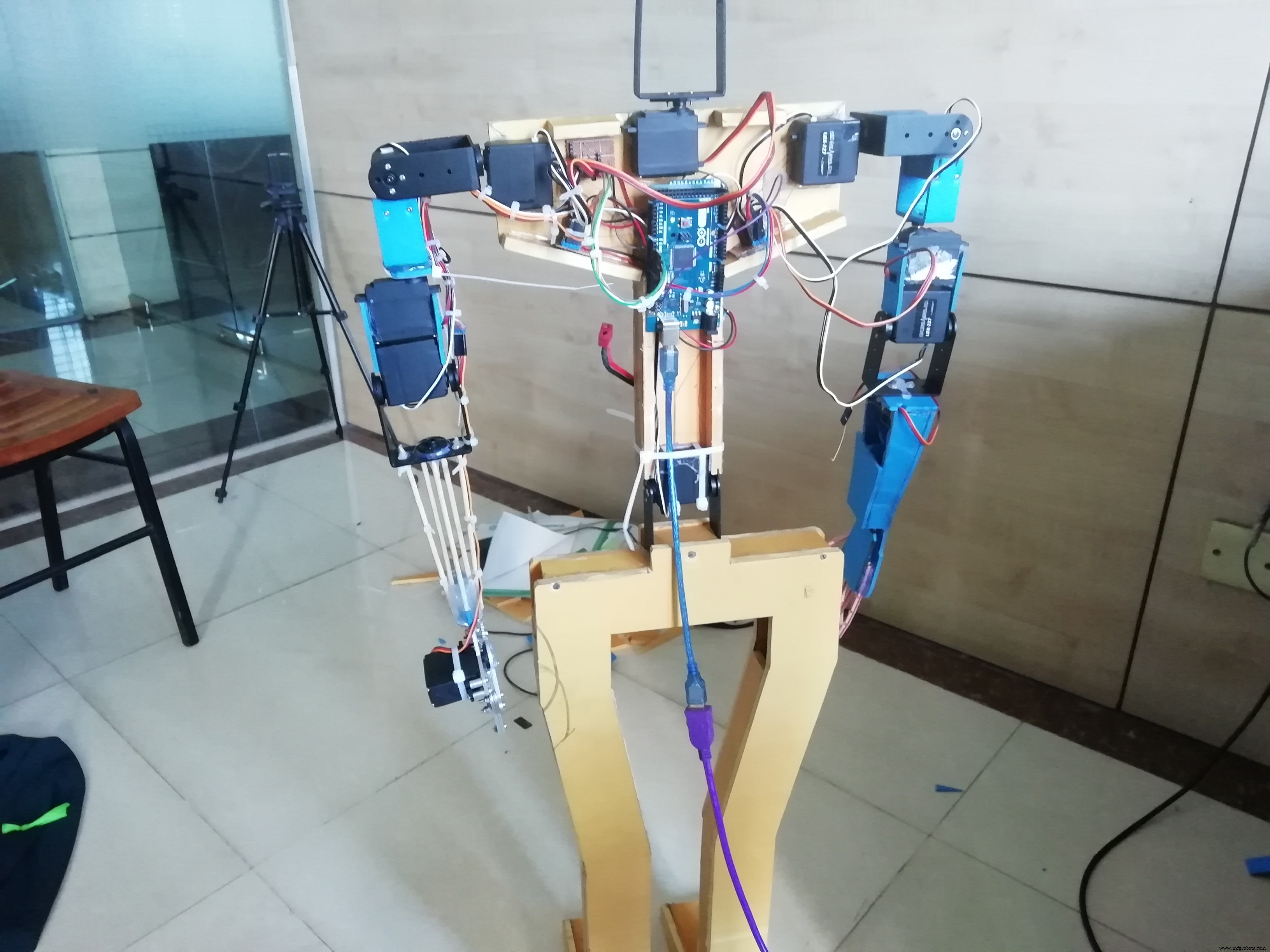
Paso 1:diseño del cuerpo y el motor
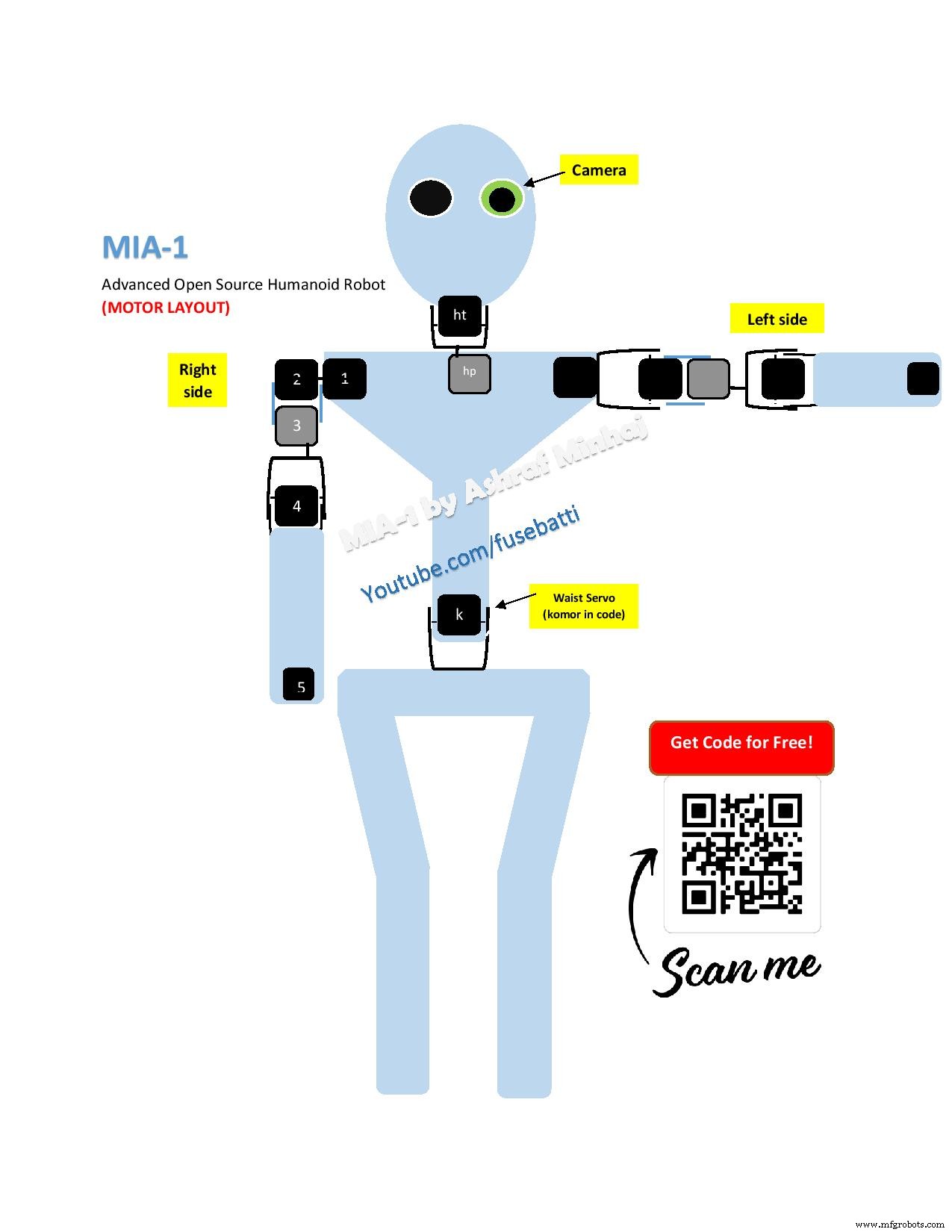

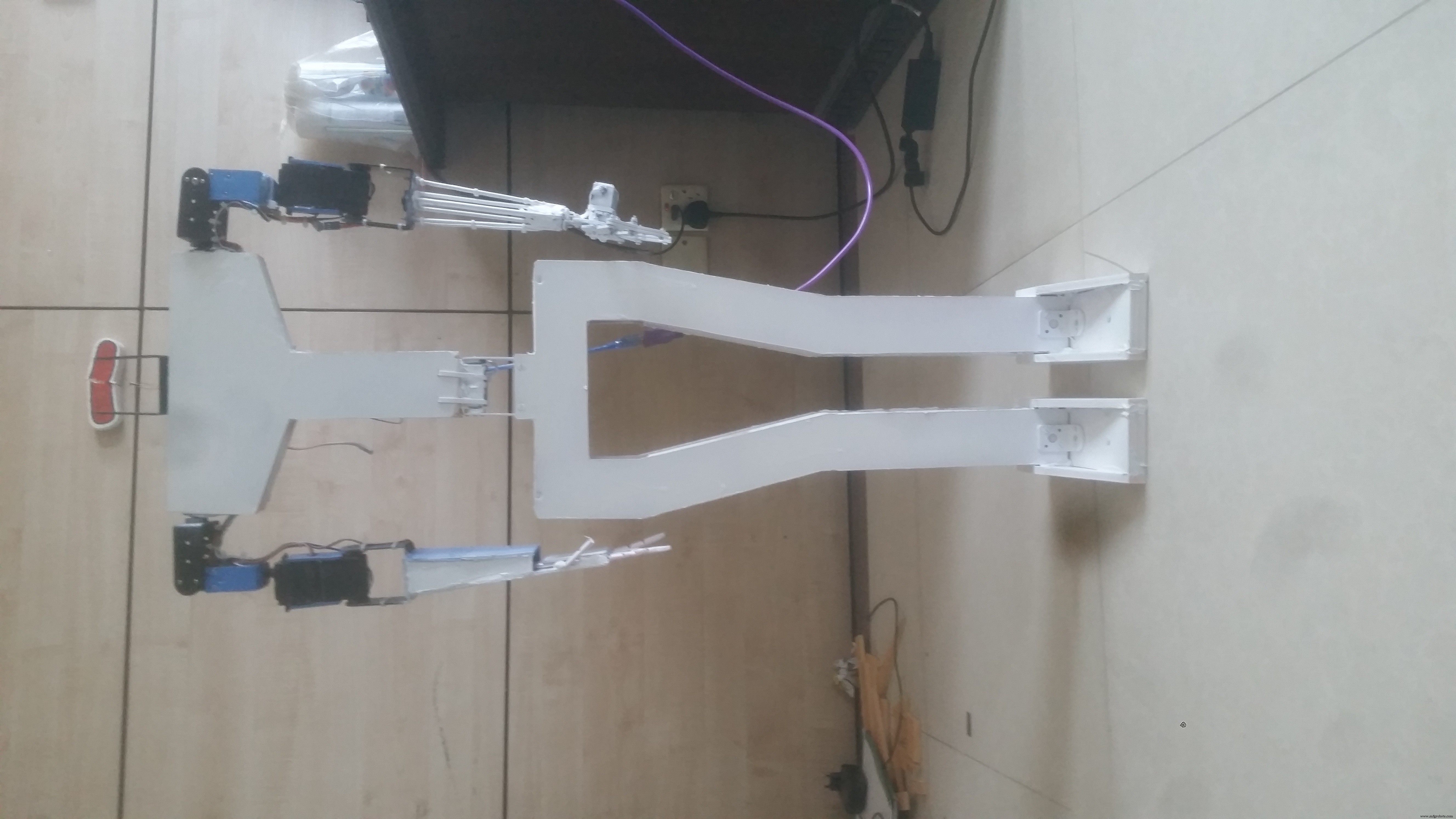
El cuerpo está fabricado con lámina de PVC diferentes piezas se unen con Hot Glue y tornillos (ver foto). He cortado la hoja de pvc con un cúter (¡ten mucho cuidado! ¡No te cortes los dedos!). En la imagen uno y dos puede ver el diseño del servo. Mientras hacía una niña robot, le di una forma y una figura de cuerpo femenino.
Los servo conectores están hechos con láminas delgadas de pvc ya que se doblan bien.
La cabeza se hace con un globo, se insufla aire en el globo (ver imagen), se le agregan pequeños trozos de papel húmedo y luego se seca. Después de agregar 8 capas, se ha vuelto fuerte y sostenible.
Luego, simplemente teñirlo de blanco (todo el cuerpo) usando color en aerosol.
¡¡Resultó que el diseño está tan increíblemente equilibrado y ella (MIA-1) se para justo a dos pies de ella !!
Agregar la pantalla:
Después de eso, solo usó algunos tornillos y pegamentos calientes para montar el lcd en su pecho (última foto).
Paso 2:diagrama de circuito
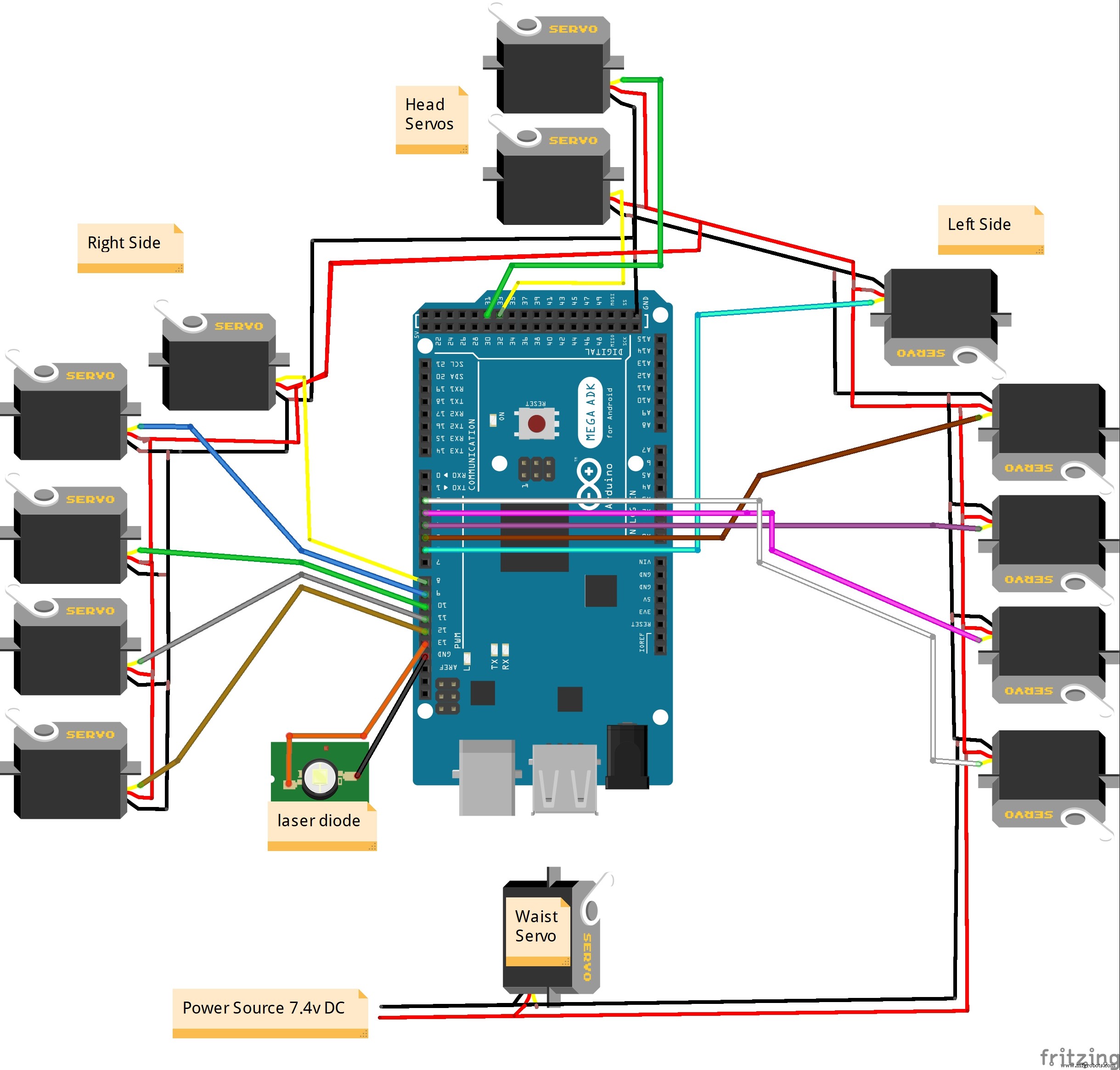
El diagrama del circuito parece complejo pero no lo es. Dibujé el circuito como el diseño del motor en la carrocería para que puedas entenderlo más fácilmente. Asegúrate de compartir el suelo. El arduino toma energía de la computadora a través de su cable USB. Hay un diodo láser que permite a mia apuntar a cosas que toma energía del pin 13 (pin led) de arduino.
Como puede ver, todos los motores y el arduino en sí están en la parte posterior del cuerpo. También he puesto todos los cables de atrás. Compró un cable USB extendido para que pueda conectarse a la computadora.
Paso 3:el CÓDIGO
Como saben, he usado un mega arduino. El arduino mega controla los servomotores, los motores están preprogramados. Obtenga el código de motores desde aquí. Tenga en cuenta las posiciones predeterminadas de los servos, mientras construye el robot manténgalas. Simplemente encienda los motores con arduino sin hacer el cuerpo y los servomotores llegarán a la posición predeterminada (posición predeterminada a continuación)
/ * posición predeterminada / en espera de los servos * /
komor.write (4); #waist servo
left1.write (120);
rFinger.write (0);
servo1.write (55);
clawOpen ();
rightStandBy ();
leftStandBy ();
headTilt.write (134);
headPan.write (90); El código de control del motor tiene más de 750 líneas (tenga cuidado al editar).
El procesamiento principal se realiza mediante un script python3.
Python tiene una biblioteca pySerial que se comunica con el arduino en serie. Tenga cuidado con el "PUERTO COM".
#Conecte con la placa del controlador del motor mia a través de la comunicación en serie
intente:
mia =serial.Serial ("COM28", 9600)
excepto:
pass También necesita instalar pip estas bibliotecas
"" "importar las bibliotecas necesarias" ""
#importar solicitudes # para realizar solicitudes de publicación / obtener
importar pyttsx3 # texto sin conexión a voz
importar speech_recognition como sr #Speech to texto (requiere Internet para funcionar)
tiempo de importación
desde la importación aleatoria aleatoria # biblioteca de selección de enteros aleatorios
importación tkinter #tkinter biblioteca de interfaz gráfica de usuario
desde tkinter importar Tk, botón, etiqueta, Tk #importar cosas necesarias
importar serial # biblioteca serial para comunicación serial a través de USB
desde PIL importar Imagen #fro mostrando imagen
importar cv2 #Computer Vision library
importar wikipedia #para obtener datos directamente de wikipedia Todo es fácil usando pip install. Para opencv escriba en el símbolo del sistema:
pip install opencv-contrib-python La GUI (interfaz gráfica de usuario) que está viendo se desarrolló utilizando tkinter. Para esta y todas las demás bibliotecas, puede instalar con este comando:
pip install nombre_biblioteca luego se instalará.
También eche un vistazo si está usando una cámara web, es más probable que la cámara se indique como 1
cap =cv2.VideoCapture (1) #camera Y si desea saber más sobre cómo este robot realmente responde, lea estos tutoriales.
El código de MIA-1 es solo una versión extendida de esto.
Al comandar el arduino, la computadora envía un mordisco, el arduino toma acciones de acuerdo a los mordiscos que recibe, así mira el movimiento de Mia y el hablar es asincrónico.
mia.write (b'p ') #command to head up then down
count_down (3)
respond ("Smile please", 100) Ahora, para obtener el código, vaya al enlace de abajo.
Descargue el código de MIA-1 desde aquí.
Paso 4:encendido y acabado
He alimentado el robot con una batería lipo de 7,4 v. Los servos LDX227 consumen mucha energía (pero son de buena calidad), así que asegúrese de que obtengan al menos 7,3 v en cualquier momento. Por otro lado, los servomotores MG996r son baratos y pueden dañarse fácilmente, asegúrese de que no tengan más de 7.8V. Por lo tanto, la fuente de alimentación más alta para este robot debe estar entre 7,4 y 7,8 voltios.
¡Feliz fabricación! Si te gusta este robot, asegúrate de apoyar suscribiéndote al canal para proyectos más increíbles.
Código
Descarga el código completo gratis
ashraf-minhaj / MIA-1-Open-Source-Humanoid-Robothttps://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RobotEsquemas
Circuito MIA-1
https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RobotProceso de manufactura
- Introducción a la terminología de código abierto
- Servomotores avanzados que transforman la impresión de metales en 3D
- Un registro de proyecto para FirePick Delta, la MicroFactory de código abierto
- Artículo:Conoce a OAP:un proyecto de diseño de referencia de robot abierto
- Intellisaurus - Kit de robot dinosaurio
- Abrir CV Robot
- Robot Pi simple
- AT&T y Tech Mahindra colaboran en una nueva plataforma de inteligencia artificial de código abierto
- Riesgos de software:protección de código abierto en IoT
- Herramientas de desarrollo de IoT de código abierto frente a herramientas compatibles con el proveedor
- MassRobotics publica los primeros estándares de interoperabilidad de robots móviles autónomos de código abierto del mundo