


Reutilizar controles remotos antiguos
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Acerca de este proyecto
Este proyecto le permite reutilizar los controles remotos sobrantes de viejos VCR, TV, reproductores de DVD, etc.

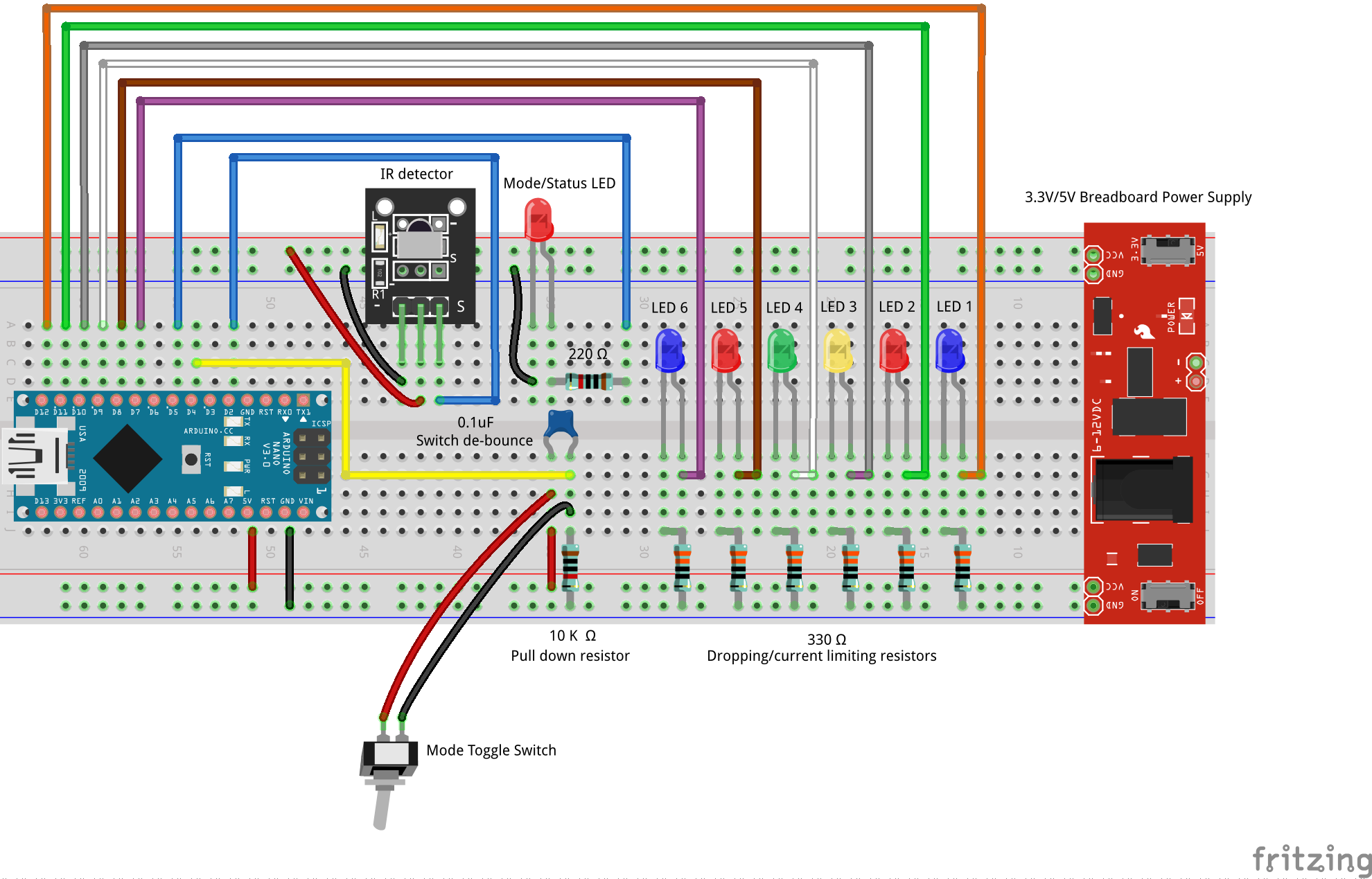
Puede usar los controles remotos para encender dispositivos como lámparas, calentadores, etc. con relés, transistores de potencia o cualquier otra cosa que una señal de 5 voltios pueda controlar. Como se muestra aquí, solo alterna hasta 6 LED. La idea es proporcionar el diseño del boceto y la placa de pruebas para que las señales enviadas a los LED se puedan enviar en paralelo a lo que el usuario imagina.
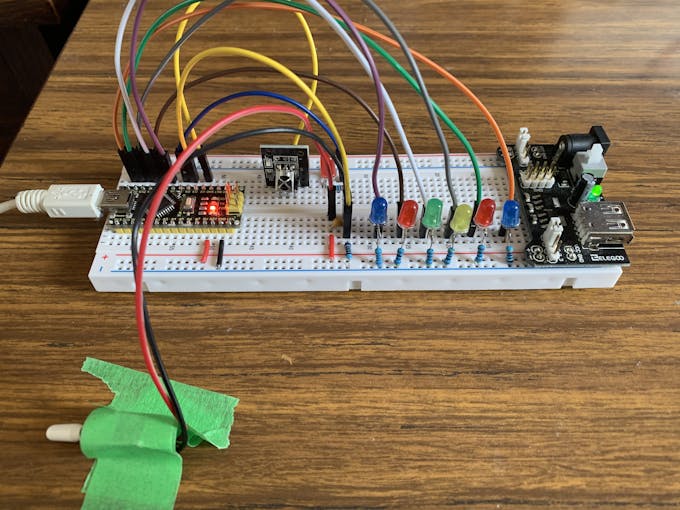
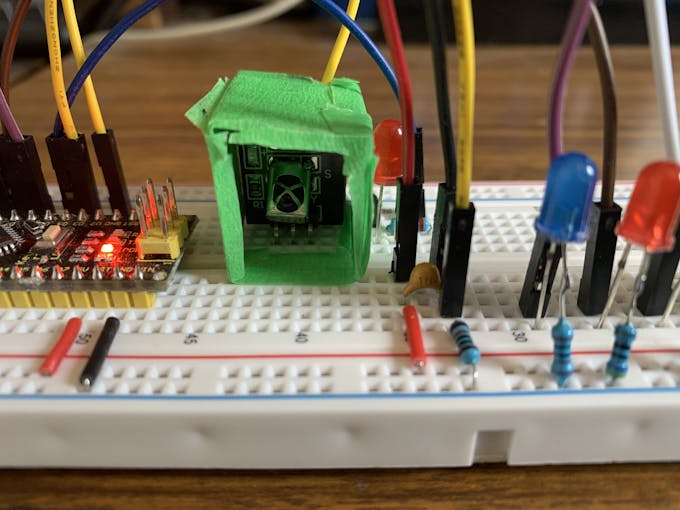
Tal como está diseñado, lee 6 códigos IR de cualquier control remoto y los "memoriza". Me gusta usar dights 1, 2, 3, 4, 5, 6, pero cualquier seis teclas funcionarán. Tenga en cuenta que cualquier otra tecla con un código IR que no sean los 6 códigos conocidos actúa como un reinicio y desactiva todas las salidas. Lo logro escribiendo los códigos como números enteros largos en la memoria EEPROM en la placa Ardunio. Cada uno toma 4 bytes, pero dado que UNO y NANO tienen cada uno 1024 bytes de memoria EEPROM, hay mucho espacio. Esta memoria se mantiene a través de reinicios y apagados, como era de esperar. Todo encajaría en una sola placa de pruebas, a excepción del interruptor de palanca. Se pueden soldar pines a este interruptor para incluirlo en la placa de pruebas. Era perezoso y usé cinta adhesiva para sostenerlo en mi escritorio durante el desarrollo.
Lo probé con cinco viejos excedentes diferentes, y todos funcionan igual. La "trampa" con la que luché fue la luz parásita o las señales más débiles de algunos controles remotos. Para resolver esto, incliné con cuidado el "LED" del receptor hacia abajo a unos 45 grados, y puse una pequeña caja de cartón y cinta adhesiva sobre él, con un extremo abierto. Parece captar los códigos de forma constante y a una distancia de 5 a 8 pies o más. No me he perdido en más de cinco días de pruebas y ajustes del programa.
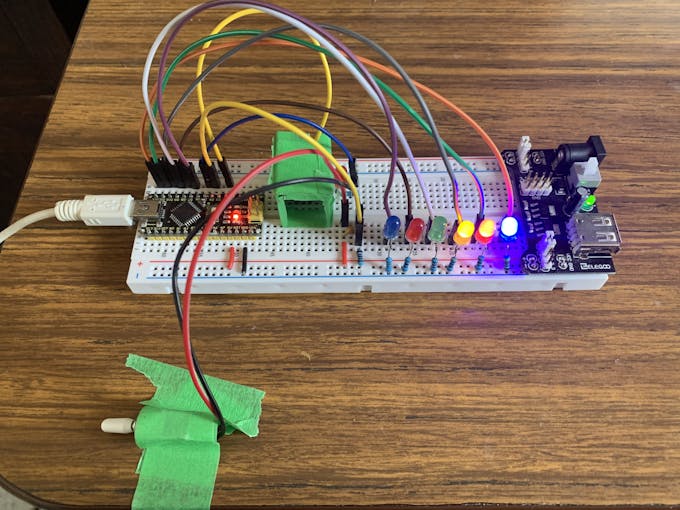
Para programarlo, use la posición "aprender". Pasas del modo "ejecutar" al modo "aprender" accionando un interruptor de palanca. Esta palanca enciende un LED indicador de modo rojo, lo que indica que está listo para escuchar. El LED 1 parpadea y usted presiona una tecla en su control remoto. El LED 1 parpadeante está programado para reaccionar a ese código. Tan pronto como reconoce el código, hace parpadear rápidamente el LED indicador de modo durante uno o dos segundos (¡tan rápido que parece que está vibrando!) Y pasa al siguiente LED. Esto continúa hasta que se programan los seis. Luego, el LED indicador de modo parpadea lentamente a intervalos de un segundo, lo que indica que el sistema debe cambiarse al modo de ejecución.
Al programarlo, descubrí que el error más común era olvidar mover el dedo al siguiente dígito del control remoto. Por tanto, es fácil programar dos salidas con el mismo código. Cada vez que se inicia, busca esos duplicados. Si los encuentra, hace parpadear los LED "ofensivos" unas cuantas veces para sugerir que podría ser necesaria una reprogramación. Sin embargo, una persona puede querer que varias teclas hagan lo mismo, por lo que no obliga a reprogramar.
El estado del modo, los errores, etc. se indican mediante la frecuencia de parpadeo del LED de estado ROJO. Toda la información indicada por los LED parpadeantes, etc., se envía al monitor en serie. Lo configuré para usar secuencias de LED de destellos para que un usuario pudiera configurarlo sin una computadora. Los mensajes enviados al monitor en serie son más fáciles de seguir que memorizar lo que significan los LED parpadeantes a varias velocidades. Dado que esto normalmente solo se programaría unas pocas veces, probablemente sea más natural conectarlo a su PC y ver el texto en el monitor en serie.
Hay muchos controles y contrapesos en el código de boceto. Están bien documentados (¡espero!), Así que no daré los detalles aquí. Los usuarios familiarizados con C, C ++ y el IDE de Arduino deberían poder seguir fácilmente el código y realizar modificaciones si lo desean.
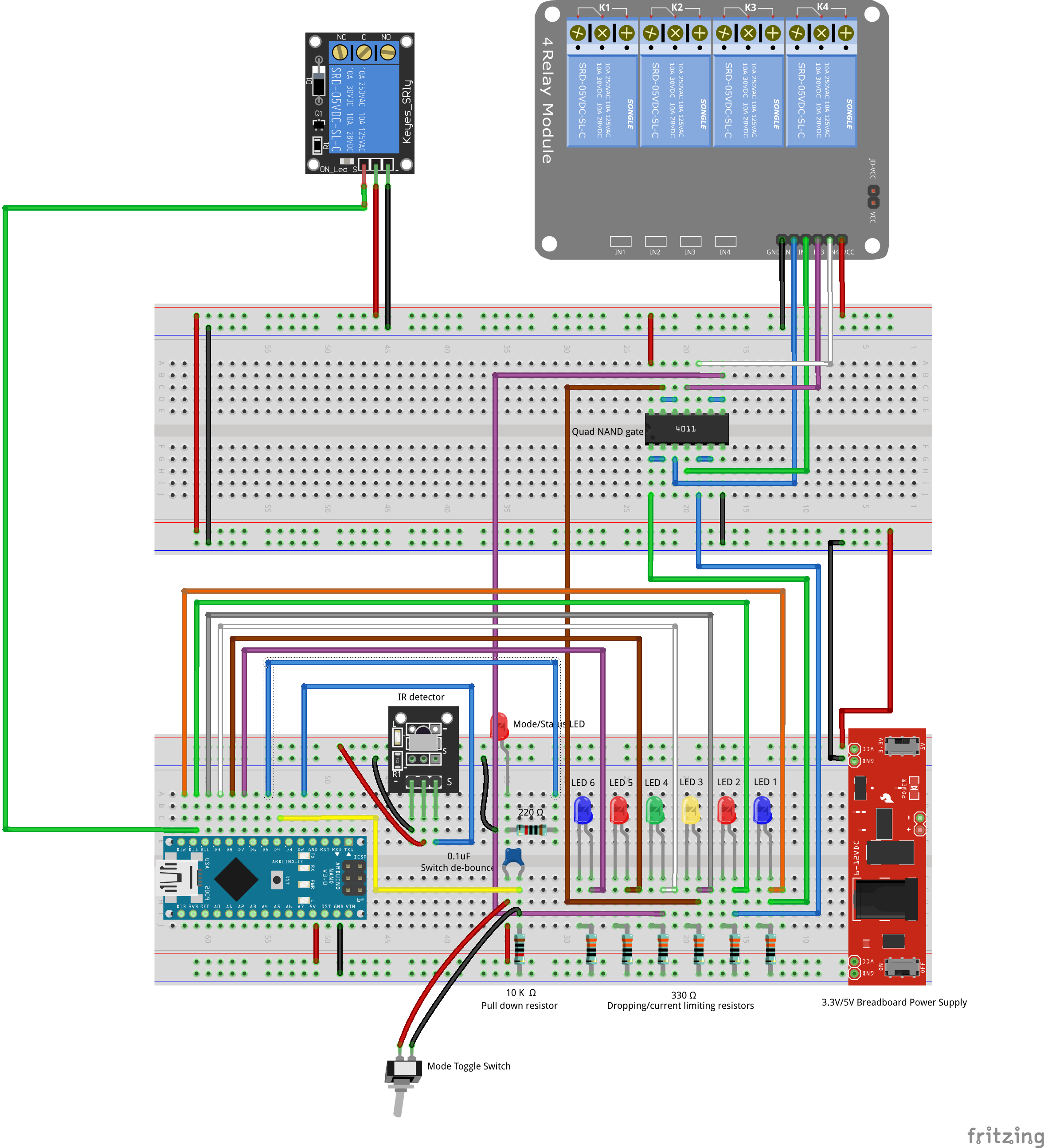
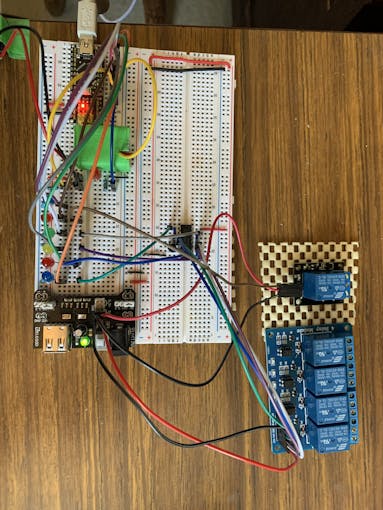
Anexo: He probado esto con 5 relés en paralelo con LED 1 a 5 y funciona como se esperaba. Todos alternan una lámpara de mesa de 120 VCA, por lo que el circuito funciona como se esperaba. Me quedé sin relés, por lo que hay que asumir que la sexta señal también funcionará. Tenga en cuenta que esto es solo una prueba de concepto. Tuve que invertir las señales de las primeras cuatro salidas con una compuerta NAND cuádruple CD4011 porque se cierran en 0 voltios en lugar de 5 voltios. El relé único funciona con una señal de + 5 voltios, por lo que no se necesitó inversión de señal. Tenga cuidado al cambiar los voltajes de red. Son de alto voltaje y tienen el potencial de dar una fuerte descarga o incluso matar.
Recuerde, esto es solo un ejemplo. Use su imaginación para saber qué dispositivos conectar a las 6 salidas. ¡Disfruta!
Código
- Boceto de reutilización del mando a distancia por infrarrojos
Boceto de reutilización del mando a distancia por infrarrojos Arduino
/ * Cambie 6 LED usando un control remoto IR para ilustrar cómo reutilizar los controles remotos Surpulus para que puedan usarse para controlar casi cualquier dispositivo. Este boceto aprende los códigos del fabricante para los botones 1, 2, 3, 4, 5, 6 y 0 en cualquier control remoto IR cuando el interruptor de palanca está en la posición "Aprender" o programar. Estos valores se guardan en la EEPROM del Arduino Nano. Cuando el interruptor de palanca se coloca en el modo "Ejecutar", estos valores se utilizan para determinar qué tecla se presiona. Luego, el control remoto enciende y apaga los 6 LED asociados. Esto es para demostrar cómo aprender e identificar los códigos independientemente del tipo de control remoto por infrarrojos. Además de los LED, las salidas se pueden ampliar para encender o apagar dispositivos con relés, transistores de alta potencia, etc. Paul M Dunphy VE1DX Marzo de 2020 * / // Incluir la biblioteca remota IR desarrollada por Ken Shirriff # include// Dar la capacidad de leer / escribir en los 1024 bytes de EEPROM # include long unsigned int intIRCode; int sin firmar longIRCodes guardados [6]; int dupeCheck largo sin firmar [6]; // Definir pin para el sensor IRconst int Recv_Pin =2; // Defina las constantes de los pines para alternar los LEDsconst int PinOne =12; const int PinTwo =11; const int PinThree =10; const int PinFour =9; const int PinFive =8; const int PinSix =7; // Defina las constantes de los pines para leer e indicar el // estado del interruptor de palanca Ejecutar / Aprender. const int switchPin =4; const int statusPin =5; const unsigned long int repeatKeyPress =0xFFFFFFFF; boolean learnMode; // Se usa para realizar un seguimiento del // modo en el que estamos según el conmutador de palanca. Boolean first_iteration; // Definir números enteros para recordar los estados de alternancia de cada LEDint togglestate1; int togglestate2; int togglestate3; int togglestate4; int togglestate5; int togglestate6; int current_remote_code; int remote_code_1; int remote_code_2; int remote_code_3; int remote_code_4; int remote_code_5; int remote_code_6 // Definir el receptor de infrarrojos y los objetos de resultados IRrecv irrecv (Recv_Pin); decode_results results; void EEPROMWritelong (int address, long value) // Escribe un entero de 4 bytes (32 bits) en la EEPROM // Dado que tienen 4 bytes de longitud, son almacenado en // dirección a dirección + 3 {// Descomponer un entero largo en 4 bytes usando desplazamiento de bits. // Uno =Más significativo -> Cuatro =Byte menos significativo byte cuatro =(valor &0xFF); byte tres =((valor>> 8) &0xFF); byte dos =((valor>> 16) &0xFF); byte uno =((valor>> 24) &0xFF); EEPROM.write (dirección, cuatro); EEPROM.write (dirección + 1, tres); EEPROM.write (dirección + 2, dos); EEPROM.write (dirección + 3, uno); } long EEPROMReadlong (dirección larga) // Leer un entero largo de 4 bytes (32 bits) de la EEPROM.// Como tienen 4 bytes de longitud, se almacenaron en // dirección a la dirección + 3 {cuatro largos =EEPROM.read ( habla a); tres largos =EEPROM.read (dirección + 1); dos largos =EEPROM.read (dirección + 2); uno largo =EEPROM.read (dirección + 3); // Ensamblar los bytes en un entero largo y devolver return ((cuatro <<0) &0xFF) + ((tres <<8) &0xFFFF) + ((dos <<16) &0xFFFFFF) + ((uno <<24) &repeatKeyPress); } int Flip_LED (int led, int toggle_state) {if (toggle_state ==0) {digitalWrite (led, HIGH); toggle_state =1; } else {digitalWrite (led, LOW); toggle_state =0; } return toggle_state; } void Reset () {// Apague todos los LED y configure los indicadores de alternancia // en apagado (0) digitalWrite (PinOne, LOW); digitalWrite (PinTwo, BAJO); digitalWrite (PinThree, BAJO); digitalWrite (PinFour, BAJO); digitalWrite (PinFive, BAJO); digitalWrite (PinSix, BAJO); togglestate1 =0; togglestate2 =0; togglestate3 =0; togglestate4 =0; togglestate5 =0; togglestate6 =0; } void guessType () {Serial.print ("Remoto parece ser un"); switch (results.decode_type) {caso NEC:Serial.println ("NEC"); descanso; caso SONY:Serial.println ("SONY"); descanso; caso RC5:Serial.println ("RC5"); descanso; caso RC6:Serial.println ("RC6"); descanso; caso DISH:Serial.println ("PLATO"); descanso; case SHARP:Serial.println ("SHARP"); descanso; caso JVC:Serial.println ("JVC"); descanso; caso SANYO:Serial.println ("SANYO"); descanso; caso MITSUBISHI:Serial.println ("MITSUBISHI"); descanso; caso SAMSUNG:Serial.println ("SAMSUNG"); descanso; caso LG:Serial.println ("LG"); descanso; case WHYNTER:Serial.println ("WHYNTER"); descanso; caso AIWA_RC_T501:Serial.println ("AIWA_RC_T501"); descanso; caso PANASONIC:Serial.println ("PANASONIC"); descanso; caso DENON:Serial.println ("DENON"); descanso; predeterminado:caso DESCONOCIDO:Serial.println ("DESCONOCIDO"); descanso; }} int learnCodeRead (int pinCode) {if (irrecv.decode (&resultados)) {pinCode =results.value; } return pinCode; } void Confirm () {int i; para (i =0; i <=20; i ++) {digitalWrite (statusPin, HIGH); retraso (50); digitalWrite (statusPin, BAJO); retraso (50); } digitalWrite (statusPin, ALTO); // Deje el LED "Aprender" alto} void learn_Mode () {boolean goodCode; int i, j; int ubicación; int pines [6] ={12,11,10,9,8,7}; // Empiece a escuchar cada uno en secuencia if (first_iteration) {Serial.println (); Serial.println ("Ingresando al modo de aprendizaje"); Serial.println (); } intIRCode =0; ubicación =0; goodCode =verdadero; j =0; while ((goodCode =true) y (j <=5)) {for (i =0; i <=25; i ++) {digitalWrite (pines [j], HIGH); retraso (200); intIRCode =learnCodeRead (intIRCode); digitalWrite (pines [j], BAJO); retraso (200); intIRCode =learnCodeRead (intIRCode); goodCode =((intIRCode! =repeatKeyPress) y (intIRCode! =0)); if (goodCode) {i =30; // Truco para salir del bucle porque 'break' // no funciona en bucles} irrecv.resume (); // Empiece a escuchar de nuevo} goodCode =(intIRCode! =RepeatKeyPress e intIRCode! =0); if (goodCode) {if (j ==0) {guessType (); } Serial.print ("Escritura en la ubicación EEPROM"); Serial.print (ubicación); Serial.print ("código IR ="); Serial.println (intIRCode, HEX); EEPROMWritelong (ubicación, intIRCode); ubicación =ubicación + 4; j ++; Confirmar(); intIRCode =0; irrecv.resume (); // Empiece a escuchar de nuevo}} Serial.println (); Serial.println ("Vuelve a poner Arduino en modo de ejecución"); while (digitalRead (switchPin) ==HIGH) {digitalWrite (statusPin, HIGH); retraso (1000); digitalWrite (statusPin, BAJO); retraso (1000); } Serial.println (); Serial.println ("Regresando al modo de ejecución."); // Probablemente no necesite ser tan drástico aquí, pero // Esto es un "reinicio" para asegurarnos de que salgamos del modo de aprendizaje // y reiniciemos correctamente. Es * probable * que esté bien // eliminar las siguientes 4 líneas. retraso (50); Serial.flush (); retraso (50); asm volatile ("jmp 0"); } void run_Mode () {if (first_iteration) {Serial.println ("Ingresando al modo de ejecución"); } if (irrecv.decode (&results)) {if (results.value! =repeatKeyPress) {current_remote_code =results.value; Serial.print ("Pulsación de tecla detectada, código IR ="); Serial.println (código_remoto_actual, HEX); if (código_remoto_actual ==código_remoto_1) {togglestate1 =Flip_LED (PinOne, togglestate1); } else if (código_remoto_actual ==código_remoto_2) {togglestate2 =Flip_LED (PinTwo, togglestate2); } else if (código_remoto_actual ==código_remoto_3) {togglestate3 =Flip_LED (PinThree, togglestate3); } else if (código_remoto_actual ==código_remoto_4) {togglestate4 =Flip_LED (PinFour, togglestate4); } else if (código_remoto_actual ==código_remoto_5) {togglestate5 =Flip_LED (PinFive, togglestate5); } más si (código_remoto_actual ==código_remoto_6) {togglestate6 =Flip_LED (PinSix, togglestate6); } else {Reset (); }} retraso (500); // Se usa para sortear la cadena rápida de datos // si se mantiene presionado un botón. Ralentiza el tiempo de respuesta // introduciendo un retraso en el ciclo. irrecv.resume (); // Empiece a escuchar de nuevo}} void setup () {first_iteration =true; int i, j, k; int ubicación; int dupeFlash [6] ={12,11,10,9,8,7}; // Números de pin para parpadear // si se encuentran duplicados Serial.begin (9600); irrecv.enableIRIn (); // Habilite el receptor de infrarrojos / * La siguiente sección de código nunca debería necesitar restablecer la EEPROM. * Sin embargo, algunos nuevos NANO "estándar" aparecen con sus EEPROM configuradas * en FFFFFFFF. Este es el código enviado por muchos controles remotos IR cuando * se mantiene presionada una tecla. Este boceto busca ese código en varios lugares * y no funcionará correctamente si a una "clave" se le asigna un FFFFFFFF hexadecimal. Para * evitar este problema, buscamos FFFFFFFF y, si encontramos uno, configuramos * las 6 ubicaciones clave para los códigos Sony RM-YD104. Si esto sucede, a menos que * esté usando ese control remoto en particular, necesitará ejecutar el boceto en modo "aprender" * para inicializarlo. * /// =============Comenzar nuevo Arduino ==================boolean defaultToSony =false; long unsigned int IRCode =0; ubicación =0; para (i =0; i <=5; i ++) {IRCode =EEPROMReadlong (ubicación); if (IRCode ==repeatKeyPress) {defaultToSony =true; } ubicación =ubicación + 4; } if (defaultToSony) {Serial.println ("HEX FFFFFFFF encontrado en la memoria EEPROM. Códigos de configuración"); Serial.println ("para un control remoto Sony RM-YD104. Ejecutando el modo 'aprender' ahora"); Serial.println ("se recomienda a menos que ese sea el control remoto que tiene"); EEPROMWritelong (0, 0x10); retraso (50); EEPROMWritelong (4, 0x810); retraso (50); EEPROMWritelong (8, 0x410); retraso (50); EEPROMWritelong (12, 0xC10); retraso (50); EEPROMWritelong (16, 0x210); retraso (50); EEPROMWritelong (20, 0xA10); retraso (50); } // =============End New Arduino ==================// Establecer pines LED como salidas pinMode (PinOne, OUTPUT); pinMode (PinTwo, SALIDA); pinMode (PinThree, SALIDA); pinMode (PinFour, SALIDA); pinMode (PinFive, SALIDA); pinMode (PinSix, SALIDA); Reiniciar(); // Comience con todos ellos fuera de pinMode (statusPin, OUTPUT); pinMode (switchPin, INPUT); // Obtener los códigos del último Serial.println () remoto utilizado; Serial.println ("Lectura de códigos remotos IR almacenados..."); ubicación =0; for (j =0; j <=5; j ++) {SavedIRCodes [j] =EEPROMReadlong (ubicación); Serial.print ("Lectura de la ubicación EEPROM"); Serial.print (ubicación); Serial.print ("código IR ="); Serial.println (Códigos IR guardados [j], HEX); ubicación =ubicación + 4; dupeCheck [j] =SavedIRCodes [j]; // Guarde una copia para la verificación de duplicados} // Busque códigos duplicados consecutivos asignados a las // salidas. No buscamos duplicados generales porque // es poco probable que ocurran. La experiencia ha demostrado que // durante la programación, el error más probable es presionar // la misma tecla dos veces en los LED de espalda a espalda. Si se encuentran // duplicados, indíquelo haciendo parpadear los LED sospechosos. // Solo hay 6 LED, por lo que solo se necesitan 21 comparaciones // para encontrar duplicados (6 + 5 + 4 + 3 + 2 + 1 =21). Esta // sección podría mejorarse para buscar cualquier duplicado // ordenando la matriz primero, etc. for (i =0; i <5 - 1; i ++) {for (j =i + 1; j <6; j ++ ) {if (dupeCheck [i] ==dupeCheck [j]) {Serial.println ("Se encontraron códigos duplicados. Sugerir volver a ejecutar el modo de aprendizaje"); para (k =0; k <=5; k ++) {digitalWrite (dupeFlash [i], HIGH); digitalWrite (dupeFlash [j], ALTO); retraso (1000); digitalWrite (dupeFlash [i], BAJO); digitalWrite (dupeFlash [j], BAJO); retraso (1000); }}}} remote_code_1 =SavedIRCodes [0]; remote_code_2 =SavedIRCodes [1]; remote_code_3 =SavedIRCodes [2]; remote_code_4 =SavedIRCodes [3]; remote_code_5 =SavedIRCodes [4]; remote_code_6 =SavedIRCodes [5]; retraso (1000); Serial.println ("Lectura de códigos almacenados"); Serial.println (); } void loop () {// Comprueba si el conmutador está activado o desactivado. Si está activado (en modo de aprendizaje) // el switchPin es HIGH:learnMode =(digitalRead (switchPin) ==HIGH); if (learnMode) {first_iteration =true; Reiniciar(); digitalWrite (statusPin, ALTO); // Enciende el LED del modo de aprendizaje:learn_Mode (); Reiniciar(); first_iteration =falso; } else {digitalWrite (statusPin, LOW); // Apaga el LED del modo de aprendizaje:run_Mode (); first_iteration =falso; }}
Esquemas
Proceso de manufactura
- Diodo emisor de luz (LED)
- Monitoreo remoto del clima usando Raspberry Pi
- Mando a distancia universal Raspberry Pi
- Monitor de frecuencia cardíaca remoto
- Melodía de baile del ataúd
- Convierte tu antiguo teléfono en un interruptor remoto
- Creación de imágenes con un LED
- Iluminación LED de 8x por sonido
- Arduino Cuadrúpedo
- 5 factores principales para elegir una plataforma de controles
- Cómo desechar de manera segura la maquinaria vieja