


Tutorial de servomotores para principiantes:Electronicslovers.com
Los servomotores también se utilizan ampliamente en ROBÓTICA Al igual que en las INDUSTRIAS, el servo es el corazón de los proyectos de ROBÓTICA en la actualidad, como el brazo robótico, los autos RC, el plato de radar, las cintas transportadoras, el posicionamiento de la antena, el enfoque automático de la cámara, el proceso de impresión, etc.
En muchos proyectos de pasatiempos, los servomotores se usan ampliamente. Espero que este artículo le brinde información breve sobre qué es realmente un servo, el principio básico de funcionamiento de un servomotor, diferentes variedades de servos, comparación básica entre un servomotor y un motor de CC normal.

Definición de servomotor:
“ Es un dispositivo que proporciona movimiento en respuesta a un comando cuando regula el movimiento en respuesta a una retroalimentación negativa. “
La característica principal del servo es controlar con precisión la posición de su eje. Es básicamente un sistema de circuito cerrado (es decir, retroalimentación negativa).
Hay cuatro partes principales en el sistema de circuito cerrado de servo:
- Motor de CC.
- Circuito de control.
- Engranajes.
- Sensor de retroalimentación de posición.
La parte principal de un servomotor es un pequeño motor de CC. Estos motores de CC son de alta velocidad (es decir, altas RPM) y par muy bajo (es decir, la fuerza de torsión responsable de realizar el trabajo). Básicamente, los motores de CC pequeños son de muy alta velocidad pero no tienen un par mucho más alto (es decir, fuerza pequeña y mayor distancia). Pero el diseño de los engranajes dentro del servo convierte esta alta velocidad y bajo par de un motor de CC en una velocidad más lenta y un par más alto (es decir, una distancia pequeña, una fuerza mayor).
Muchos motores de CC son más rápidos alrededor de 5000 RPM, pero los engranajes reducen estas muy altas RPM a aproximadamente 60 RPM y un alto par. Los servos que son económicos tienen engranajes hechos de plástico para mantener su peso más liviano y económico, mientras que los servos diseñados para trabajos más pesados (es decir, par muy alto) tienen engranajes hechos de metal para, por ejemplo, servos utilizados en industrias. .
Cuando la energía se aplica por primera vez al servo a través de la línea de entrada, el motor de CC gira a RPM muy altas y un par muy pequeño, pero debido a los engranajes, el eje del servo se ralentiza.
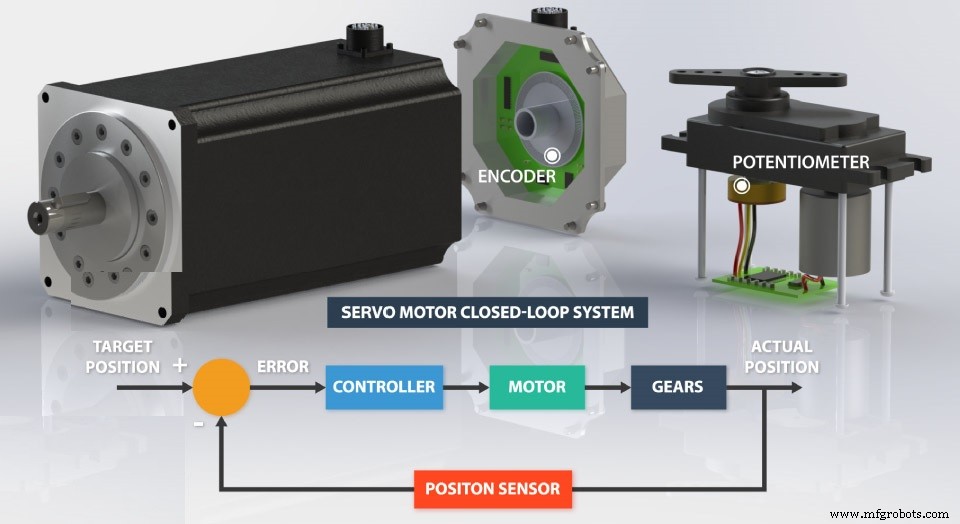 Dado que el sensor de retroalimentación de posición está conectado en un arreglo de retroalimentación negativa para controlar la posición de un servo precisamente para la posición deseada. En los servos industriales, el sensor de retroalimentación de posición es un codificador de alta precisión, pero en un hobby, el sensor de posición de los servos es un potenciómetro. El sensor de posición (es decir, el potenciómetro) en el engranaje final está conectado al circuito que contiene el detector de errores (es decir, este detector de errores es básicamente un comparador que compara dos señales, una es de la línea de entrada también llamada posición objetivo y otra es de la salida a través del potenciómetro también llamado posición real) y un controlador IC integrado en la placa.
Dado que el sensor de retroalimentación de posición está conectado en un arreglo de retroalimentación negativa para controlar la posición de un servo precisamente para la posición deseada. En los servos industriales, el sensor de retroalimentación de posición es un codificador de alta precisión, pero en un hobby, el sensor de posición de los servos es un potenciómetro. El sensor de posición (es decir, el potenciómetro) en el engranaje final está conectado al circuito que contiene el detector de errores (es decir, este detector de errores es básicamente un comparador que compara dos señales, una es de la línea de entrada también llamada posición objetivo y otra es de la salida a través del potenciómetro también llamado posición real) y un controlador IC integrado en la placa.
Debido a la rotación de los engranajes, la perilla del potenciómetro gira, como resultado, se producen los voltajes que se conectan al detector de error. Ahora el error producido debido a la comparación de dos señales por el comparador, que está conectado al controlador IC (es decir, este controlador es un H-Bridge integrado en un chip). Después de la comparación, se produce un error que permite que el controlador decida la rotación del eje en cualquier dirección para lograr la posición objetivo. 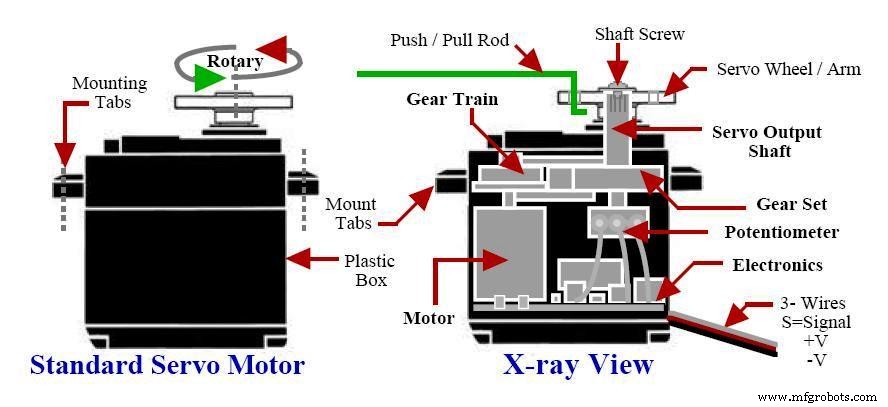
Tipos de SERVOS:
Los servos están disponibles en diferentes variedades.
- SERVO POSICIONAL ROTACIONAL:
El eje de salida girará solo 180 grados. Se sitúan topes adicionales para limitar la rotación adicional del eje fuera de su rango (por ejemplo:brazos ROBÓTICOS, timones, etc.)
- SERVO DE ROTACIÓN CONTINUA:
Es similar al servo de rotación posicional, pero puede girar 360 grados de forma continua. Los comandos enviados al servo harán que gire en el sentido de las agujas del reloj o en el sentido contrario a las agujas del reloj a una velocidad variable (por ejemplo:plato de RADAR, etc.).
- SERVO LINEAL:
El movimiento de este servo es de ida y vuelta en lugar de circular (por ejemplo:máquina CNC, impresoras 3D, etc.).
COMPARACIÓN BÁSICA ENTRE SERVO Y MOTOR DC:
Los servomotores pueden girar 180 grados de un lado a otro, pero los motores de CC pueden girar 360 grados siempre que se les aplique alimentación. El servo hoy en día también está disponible en la rotación continua que puede girar 360 grados, pero debido al diseño del engranaje, la velocidad del servo es menor en comparación con el motor de CC. Los motores de CC son la mejor opción para robots de funcionamiento libre, mientras que cuando necesitamos precisión (por ejemplo:BRAZO ROBÓTICO, limpiaparabrisas, timones de barcos, etc.), el servo es la mejor opción.
La velocidad del motor de CC se controla mediante la técnica PWM (modulación de ancho de pulso) (es decir, al variar el ciclo de trabajo podemos controlar la velocidad del motor de CC). Por ejemplo:ciclo de trabajo superior al 50 % significa que la velocidad es más rápida, un ciclo de trabajo inferior al 50 % significa que la velocidad es más lenta.
Mientras que la técnica PWM en servomotor determina la posición de su eje en lugar de la velocidad. Una vez que se envía el comando al servo, establecerá con precisión la posición del eje en la posición deseada. Por lo tanto, este comportamiento ajustable automáticamente de su eje hace que el servo sea la elección perfecta para la aplicación ROBÓTICA.
Tecnología Industrial
- Renesas amplía las opciones de microcontroladores para el servocontrol en robots industriales
- Construye robots Raspberry Pi:el mejor tutorial para principiantes
- Robot Pi simple
- Lenguaje de programación C PDF:tutorial básico para principiantes
- Expertos en reparación de servomotores Fanuc
- Consejos para reparaciones de servomotores y solución de problemas
- ¿Para qué tipo de cortadora láser es adecuado el servomotor?
- Cables de motor para variadores de velocidad
- Una descripción general para principiantes:¿Qué es la fabricación de metal?
- La belleza de la caja de cambios planetaria para servomotor
- ¿Qué es un servomotor?