


El pestillo S-R
Un multivibrador biestable tiene dos estados estables, como lo indica el prefijo bi en su nombre. Normalmente, un estado se denomina conjunto y el otro como reiniciar . El dispositivo biestable más simple, por lo tanto, se conoce como set-reset , o S-R, pestillo. Para crear un pestillo S-R, podemos cablear dos puertas NOR de tal manera que la salida de una se retroalimente a la entrada de otra, y viceversa, así:
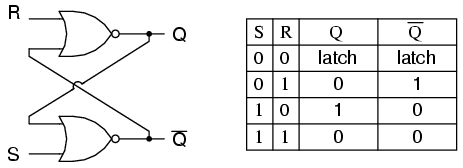
Se supone que las salidas Q y no Q están en estados opuestos. Digo "se supone que" porque hacer que las entradas S y R sean iguales a 1 da como resultado que Q y no Q sean 0. Por esta razón, tener S y R iguales a 1 se denomina inválido o ilegal estado para el multivibrador S-R.
De lo contrario, hacer S =1 y R =0 "establece" el multivibrador de modo que Q =1 y no-Q =0. Por el contrario, hacer que R =1 y S =0 “reinicia” el multivibrador en el estado opuesto. Cuando S y R son ambos iguales a 0, las salidas del multivibrador "se bloquean" en sus estados anteriores.
Observe cómo se puede implementar la misma función multivibrador en lógica de escalera, con los mismos resultados:
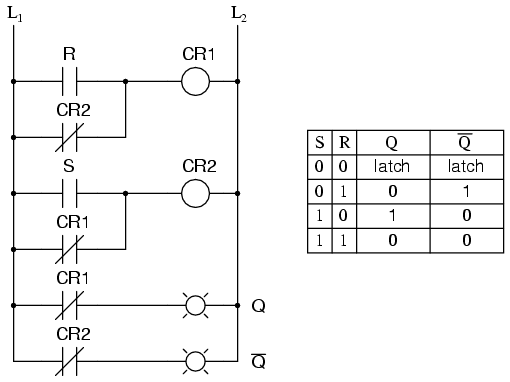
Por definición, una condición de Q =1 y no-Q =0 es establecida . Una condición de Q =0 y no Q =1 es restablecer . Estos términos son universales para describir los estados de salida de cualquier circuito multivibrador. El observador astuto notará que la condición de encendido inicial de la variedad de puerta o escalera del pestillo S-R es tal que ambas puertas (bobinas) se inician en el modo desenergizado.
Como tal, uno esperaría que el circuito se inicie en una condición no válida, con las salidas Q y no Q en el mismo estado. De hecho, ¡esto es cierto! Sin embargo, la condición no válida es inestable con las entradas S y R inactivas, y el circuito se estabilizará rápidamente en la condición de armado o reinicio porque una puerta (o relé) seguramente reaccionará un poco más rápido que la otra.
Si ambas puertas (o bobinas) fueran exactamente idénticas , oscilarían entre alto y bajo como un multivibrador astable al encenderse sin llegar a un punto de estabilidad. Afortunadamente para casos como este, una coincidencia tan precisa de componentes es una posibilidad poco común.
Debe tenerse en cuenta que aunque una condición estable (oscilando continuamente) sería extremadamente rara, lo más probable es que haya uno o dos ciclos de oscilación en el circuito anterior y el estado final del circuito (configurado o reiniciado) después del encendido. sería impredecible.
La raíz del problema es una condición de carrera entre los dos relés CR 1 y CR 2 .
Una condición de carrera ocurre cuando dos eventos mutuamente excluyentes se inician simultáneamente a través de diferentes elementos del circuito por una sola causa. En este caso, los elementos del circuito son relés CR 1 y CR 2 , y sus estados desenergizados son mutuamente excluyentes debido a los contactos de enclavamiento normalmente cerrados.
Si una bobina de relé está desenergizada, su contacto normalmente cerrado mantendrá la otra bobina energizada, manteniendo así el circuito en uno de dos estados (establecido o reiniciado). El enclavamiento previene ambos relés de enclavamiento.
Sin embargo, si ambos las bobinas del relé comienzan en sus estados desenergizados (por ejemplo, después de que todo el circuito se haya desenergizado y luego se encienda) ambos relés se “apresurarán” para engancharse a medida que reciben energía (la “causa única”) a través del contacto normalmente cerrado del otro relé. Uno de esos relés inevitablemente alcanzará esa condición antes que el otro, abriendo así su contacto de enclavamiento normalmente cerrado y desenergizando la otra bobina del relé.
Qué relé "gana" esta carrera depende de las características físicas de los relés y no del diseño del circuito, por lo que el diseñador no puede asegurar en qué estado caerá el circuito después del encendido. Las condiciones de carrera deben evitarse en el diseño del circuito principalmente por la imprevisibilidad que se creará. Una forma de evitar tal condición es insertar un relé de retardo de tiempo en el circuito para deshabilitar uno de los relés competidores por un corto tiempo, dando al otro una clara ventaja.
En otras palabras, al ralentizar deliberadamente la desactivación de un relevo, nos aseguramos de que el otro relevo siempre “gane” y los resultados de la carrera siempre serán predecibles.
A continuación, se muestra un ejemplo de cómo se podría aplicar un relé de retardo de tiempo al circuito anterior para evitar la condición de carrera:
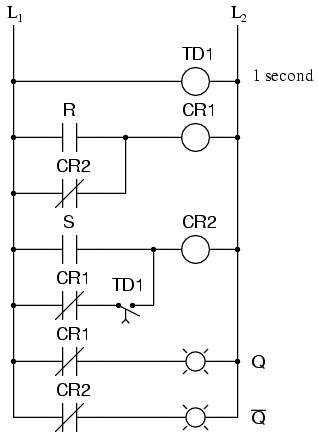
Cuando el circuito se enciende, el relé de retardo de tiempo contacta TD 1 en el quinto escalón hacia abajo retrasará el cierre durante 1 segundo. Tener ese contacto abierto durante 1 segundo evita que el relé CR 2 de energizar a través del contacto CR 1 en su estado normalmente cerrado después del encendido.
Por lo tanto, retransmita CR 1 se le permitirá energizarse primero (con una ventaja de 1 segundo), abriendo así el CR 1 normalmente cerrado contacto en el quinto escalón, evitando CR 2 de ser energizado sin que la entrada S se active.
El resultado final es que el circuito se enciende de manera limpia y predecible en el estado de reinicio con S =0 y R =0. Cabe mencionar que las condiciones de carrera no se limitan a los circuitos de relevos. Los circuitos de compuerta lógica de estado sólido también pueden sufrir los efectos nocivos de las condiciones de carrera si se diseñan incorrectamente.
Los programas informáticos complejos, en realidad, también pueden generar problemas de carrera si se diseñan incorrectamente. Los problemas de carrera son una posibilidad para cualquier sistema secuencial y es posible que no se descubran hasta algún tiempo después de la prueba inicial del sistema. Pueden ser problemas muy difíciles de detectar y eliminar.
Una aplicación práctica de un circuito de enclavamiento S-R podría ser para arrancar y detener un motor, usando contactos de interruptor de botón pulsador momentáneo normalmente abiertos para ambos arranque (S) y detener (R), luego energiza un contactor de motor con un CR 1 o CR 2 contacto (o usando un contactor en lugar de CR 1 o CR 2 ).
Normalmente, se emplea un circuito de lógica de escalera mucho más simple, como este:
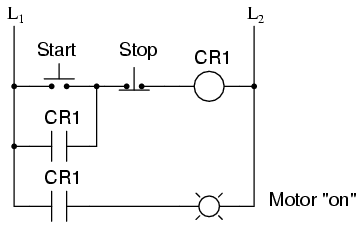
En el circuito de arranque / parada del motor anterior, el CR 1 contacto en paralelo con el inicio El contacto del interruptor se denomina contacto de "sellado", porque "sella" o enclava el relé de control CR 1 en el estado energizado después del inicio se ha lanzado el interruptor.
Para romper el "sello" o "desenganchar" o "restablecer" el circuito, el detener se presiona el botón, que desenergiza CR 1 y restaura el contacto de sellado a su estado normalmente abierto. Sin embargo, observe que este circuito realiza la misma función que el pestillo S-R.
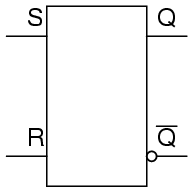
Además, tenga en cuenta que este circuito no tiene un problema de inestabilidad inherente (aunque sea una posibilidad remota) como lo hace el diseño de pestillo S-R de doble relé. En forma de semiconductor, los pestillos S-R vienen en unidades empaquetadas para que no tenga que construirlos a partir de puertas individuales. Están simbolizados como tales:
REVISAR:
- Un biestable multivibrador es uno con dos estados de salida estables.
- En un multivibrador biestable, la condición de Q =1 y no-Q =0 se define como set . Una condición de Q =0 y no-Q =1 se define a la inversa como restablecer . Si Q y no-Q se ven forzados al mismo estado (ambos 0 o ambos 1), ese estado se denomina inválido .
- En un pestillo S-R, la activación de la entrada S establece el circuito, mientras que la activación de la entrada R restablece el circuito. Si las entradas S y R se activan simultáneamente, el circuito estará en una condición no válida.
- Una condición de carrera es un estado en un sistema secuencial donde dos eventos mutuamente excluyentes son iniciados simultáneamente por una sola causa.
Tecnología Industrial
- Pestillo S-R de la puerta NOR
- Pestillo de puerta NAND S-R habilitado
- El pestillo S-R cerrado
- El pestillo D
- Los fundamentos de la fabricación de placas de circuito impreso
- La historia de las placas de circuito impreso
- ¿Cuál es el uso de los puntos de prueba en un circuito de PCB?
- Rastreo de circuitos:la guía definitiva
- El proceso de ensamblaje de una placa de circuito impreso
- Las diversas formas de ensamblaje de la placa de circuito
- La evolución de las placas de circuito impreso