


Diseño magnético de efecto Hall:configuraciones frontal y deslizante
Aprenda cómo se usa el efecto Hall en aplicaciones de detección de posición.
La detección de posición es una de las aplicaciones más importantes de los sensores de efecto Hall. Un dispositivo de efecto Hall detecta la fuerza del campo magnético aplicado. Para detectar la posición de un objeto, podemos colocar un pequeño imán permanente en el objeto. A medida que el objeto mueve el imán en relación con el dispositivo Hall, la fuerza del campo magnético cambia. El sistema puede procesar estos cambios para detectar la posición del objeto.
Hay varias configuraciones de sensor-imán diferentes que se pueden utilizar en aplicaciones de detección de posición basadas en el efecto Hall. Con cada configuración de sensor-imán, el imán se mueve en relación con el sensor de una manera diferente. Esto afecta el campo magnético detectado por el dispositivo Hall y cambia las características del sistema.
En este artículo, analizaremos algunas de las configuraciones magnéticas básicas que se utilizan en la detección de posición basada en el efecto Hall y analizaremos sus ventajas y desventajas.
Configuración frontal
La configuración magnética más simple es la detección frontal que se muestra en la Figura 1.
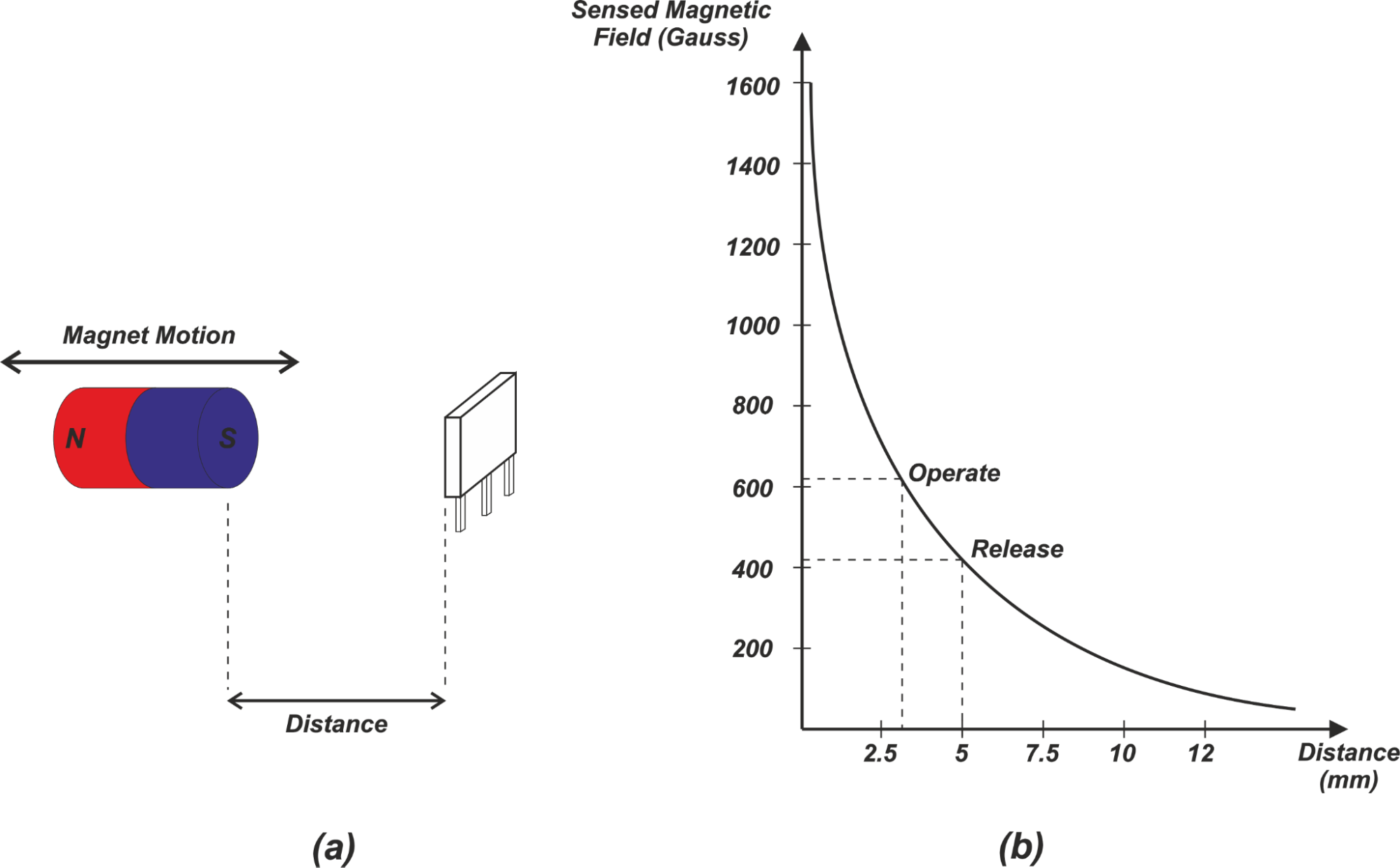
Figura 1.
En este caso, el polo sur del imán se mueve directamente hacia o lejos del sensor. Cuando el imán está muy cerca del sensor, una gran cantidad de líneas magnéticas de flujo pasan a través de la cara de detección del sensor. Sin embargo, a medida que el polo sur del imán se aleja del sensor, la intensidad del campo magnético disminuye rápidamente como se muestra en la Figura 1 (b).
Tenga en cuenta que la curva de Gauss en función de la distancia a veces se denomina mapa de flujo de la estructura. La densidad de flujo magnético de la configuración frontal es inversamente proporcional al cuadrado de la distancia entre el imán y el sensor. Los valores de flujo dados en la Figura 1 (b) pueden ser producidos por un imán que mide aproximadamente 30 mm de largo y tiene un diámetro de aproximadamente 6 mm.
Aplicación:detección de la presencia de un objeto
La configuración frontal se puede utilizar con un sensor de efecto Hall digital (ENCENDIDO / APAGADO) para detectar la presencia de un objeto. Suponga que los puntos de operación y liberación magnéticos del sensor son como se muestra en la Figura 1 (b). El punto de funcionamiento magnético especifica el nivel de un campo magnético reforzado en el que se enciende un dispositivo Hall. El punto de liberación magnética corresponde al campo magnético debilitado en el que el dispositivo Hall se apaga.
A medida que el imán se acerca al sensor, la intensidad del campo magnético aumenta cada vez más. A una distancia de aproximadamente 3,1 mm, el campo magnético detectado es igual al punto de funcionamiento magnético (aproximadamente 620 Gauss en nuestro ejemplo) que enciende el sensor. Acercar el imán al sensor genera un campo magnético aún mayor y mantiene el sensor ENCENDIDO. Cuando el sensor se aleja del imán, el campo magnético disminuye.
Sin embargo, siempre que el campo magnético no sea más pequeño que el punto de liberación (aproximadamente 420 Gauss en nuestro ejemplo), el sensor permanece ENCENDIDO. Solo cuando el campo magnético cae por debajo del punto de liberación, el dispositivo se apaga. De esta forma, podemos detectar la presencia de un objeto.
Limitaciones de la detección frontal
Esta configuración es menos precisa especialmente en términos de la distancia que hace que el sensor se apague. Esto se debe al hecho de que la pendiente del mapa de flujo (la curva de Gauss frente a la distancia) es menor alrededor del punto de liberación. Una variación dada en el valor del punto de liberación magnética puede conducir a una variación relativamente grande en el valor de la distancia a la que se apaga el sensor. La misma variación en el punto de operación magnético conduce a una variación de distancia menor. Esto se ilustra en la Figura 2.
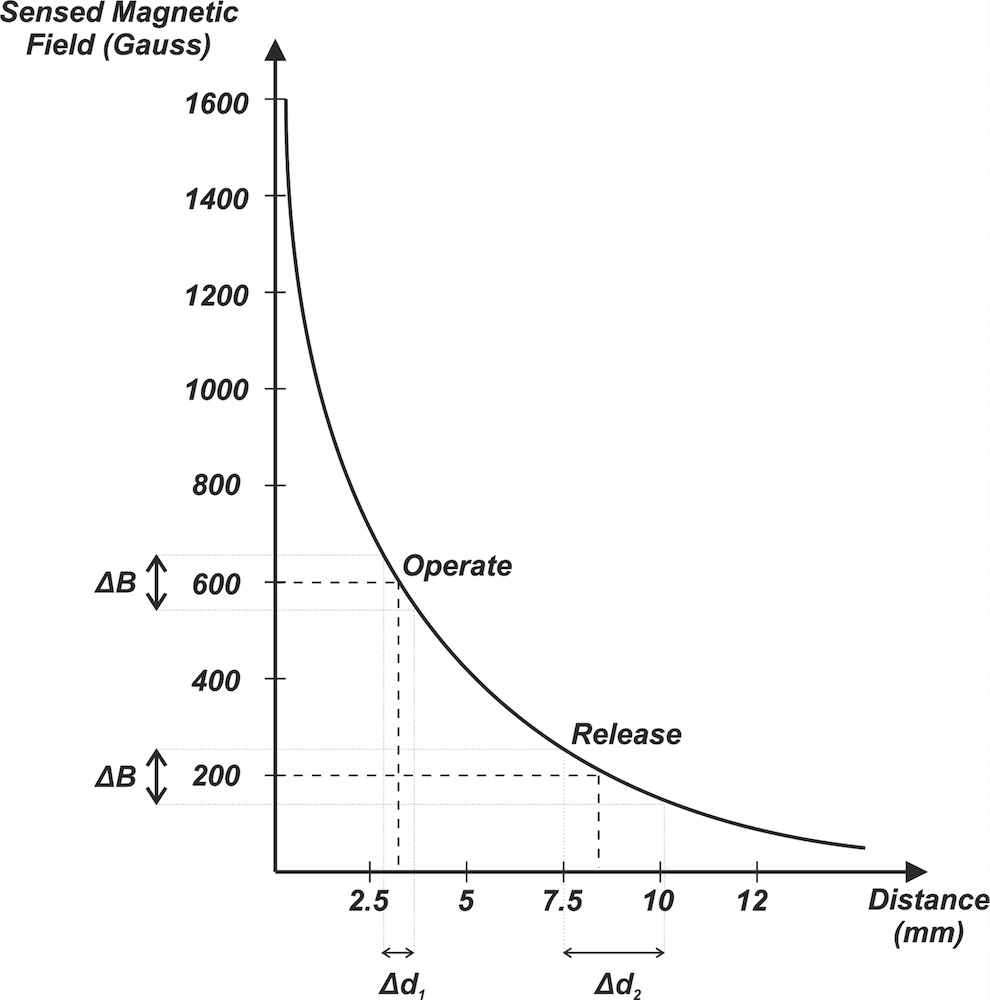
Figura 2
Suponga que la variación de unidad a unidad de los puntos de operación y liberación son ΔB para un sensor hipotético como se muestra en la Figura 2. Dado que la curva tiene una pendiente mayor en el punto de operación magnético, Δd 1 es mucho más pequeño que Δd 2 . Por lo tanto, la distancia correspondiente al punto de operación magnético será más consistente entre diferentes tableros.
Otra desventaja es que la detección frontal no se puede utilizar para detectar grandes rangos de desplazamiento porque las líneas del campo magnético decaen muy rápidamente. Además, con la configuración frontal, la relación entre el campo detectado y la distancia no es lineal. Esto hace que la detección de movimientos de carrera larga sea un desafío cuando se requiere una medición de posición lineal. Debido a estas limitaciones, la detección frontal se suele utilizar como detector de proximidad en aplicaciones donde los requisitos de precisión no son muy exigentes.
Detección de deslizamiento unipolar
En esta disposición, un solo polo del imán se mueve lateralmente más allá de la cara de detección del sensor. Esto se muestra en la Figura 3 (a).
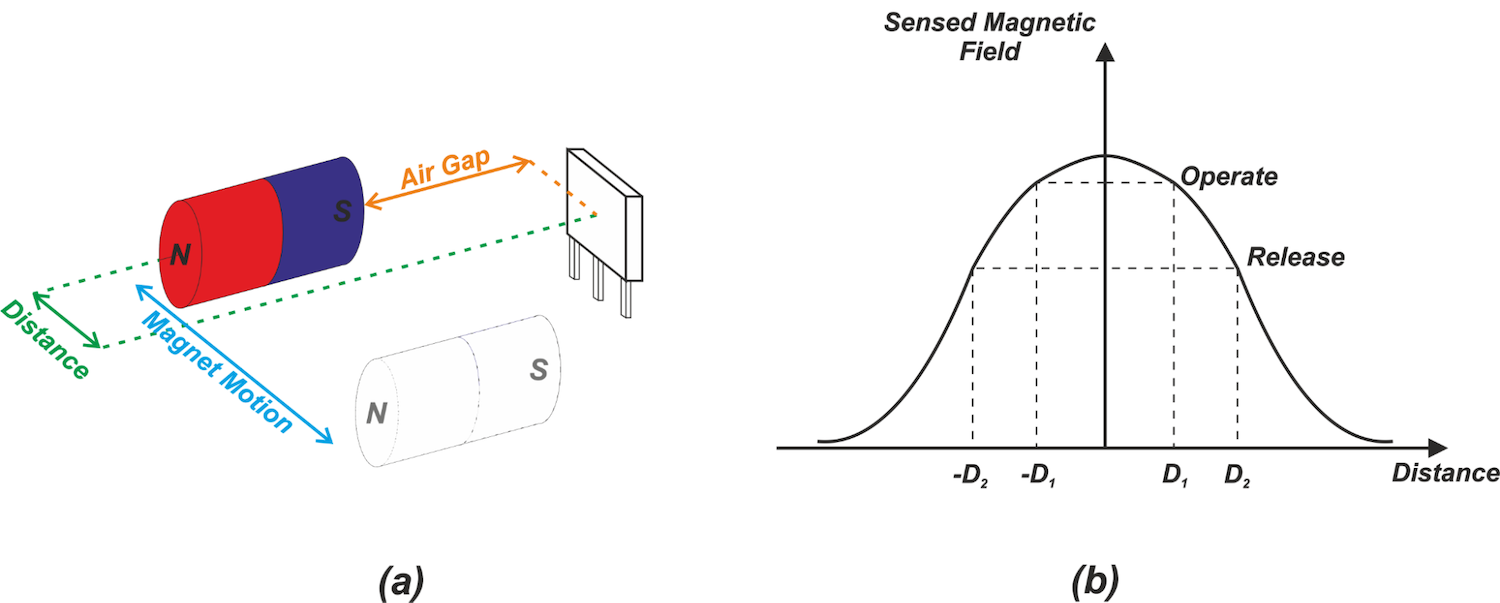
Figura 3
El polo del imán se encuentra a una distancia perpendicular constante (que se muestra mediante un "espacio de aire" en la figura) a medida que pasa por el sensor. En la posición central (distancia =0), el campo magnético detectado está en su máximo. A medida que el imán se aleja del sensor, el campo magnético disminuye. Dado que el campo magnético producido por el imán es simétrico, el mapa de flujo es simétrico alrededor del origen como se muestra en la Figura 3 (b).
El valor máximo del mapa de flujo cambia con el valor del "espacio de aire" como se muestra en la Figura 4.
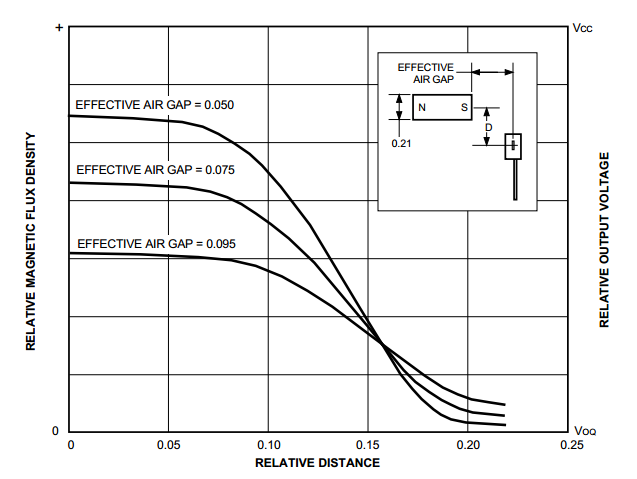
Figura 4. Imagen cortesía de Allegro.
¿Configuración frontal o deslizante?
Es importante tener en cuenta que la elección de la configuración magnética depende del tipo de movimiento que se detecte. Cada sistema puede tener un conjunto diferente de limitaciones y características mecánicas. Por ejemplo, con la configuración frontal, el objeto no puede pasar por el sensor. Esta disposición se adapta a aplicaciones donde el objeto que se detecta tiene una posición final definida y estamos interesados en detectar la presencia / ausencia del objeto en este punto final.
Por ejemplo, la detección frontal puede ser una buena opción para detectar si la tapa de la cubierta de un teléfono inteligente está abierta o cerrada. La detección de deslizamiento no tiene esta limitación; se puede utilizar sin importar si el objeto pasa por el sensor o no.
Una característica interesante de la configuración de deslizamiento es su simetría. Dado que la curva de Gauss versus la distancia de esta estructura es simétrica alrededor del origen, los puntos de operación y liberación no dependen de si nos estamos acercando o alejándonos del sensor. Esto puede resultar útil cuando se detecta una desviación de una línea central.
Tenga en cuenta que existen otras configuraciones de deslizamiento, algunas de las cuales no proporcionan una respuesta simétrica. En el próximo artículo, veremos configuraciones magnéticas más sofisticadas que se usan comúnmente en aplicaciones de detección de posición con efecto Hall.
Para ver una lista completa de mis artículos, visite esta página.
Sensor
- Sensor de presión arterial:funcionamiento y sus aplicaciones
- Funcionamiento del sensor de voltaje y sus aplicaciones
- Sensor RVG - Principio de funcionamiento y sus aplicaciones
- Sensor Lambda - Funcionamiento y sus aplicaciones
- El funcionamiento del sensor de imagen y sus aplicaciones
- Sensor de color - Trabajo y aplicaciones
- Sensor Arduino - Tipos y aplicaciones
- Compass Sensor - Trabajo y aplicaciones
- ACS712 Funcionamiento y aplicaciones del sensor de corriente
- Funcionamiento del sensor de giroscopio y sus aplicaciones
- Descripción del sensor de efecto Hall