


Detección de posición con efecto Hall:linealidad de respuesta y pendiente para configuraciones deslizantes
Obtenga más información acerca de cómo varias decisiones relacionadas con las soluciones de detección de efecto Hall, específicamente para configuraciones deslizantes, pueden afectar sus diseños.
Los sensores de efecto Hall permiten soluciones eficientes para la detección de posición. Con los sensores Hall, no hay conexión mecánica entre el sensor y la parte móvil y, por lo tanto, se puede lograr una mayor confiabilidad y durabilidad.
Hay varias configuraciones diferentes de sensores magnéticos que se pueden usar en aplicaciones de detección de posición basadas en el efecto Hall. En este artículo, veremos una configuración magnética deslizante que puede producir una curva lineal de Gauss frente a la distancia. También veremos que es posible utilizar una combinación de imanes para ajustar la pendiente de la curva de Gauss frente a la distancia.
La linealidad puede ser un factor de decisión
En un artículo anterior, examinamos las configuraciones simples de avance y deslizamiento. Estos dos arreglos se muestran en la Figura 1.
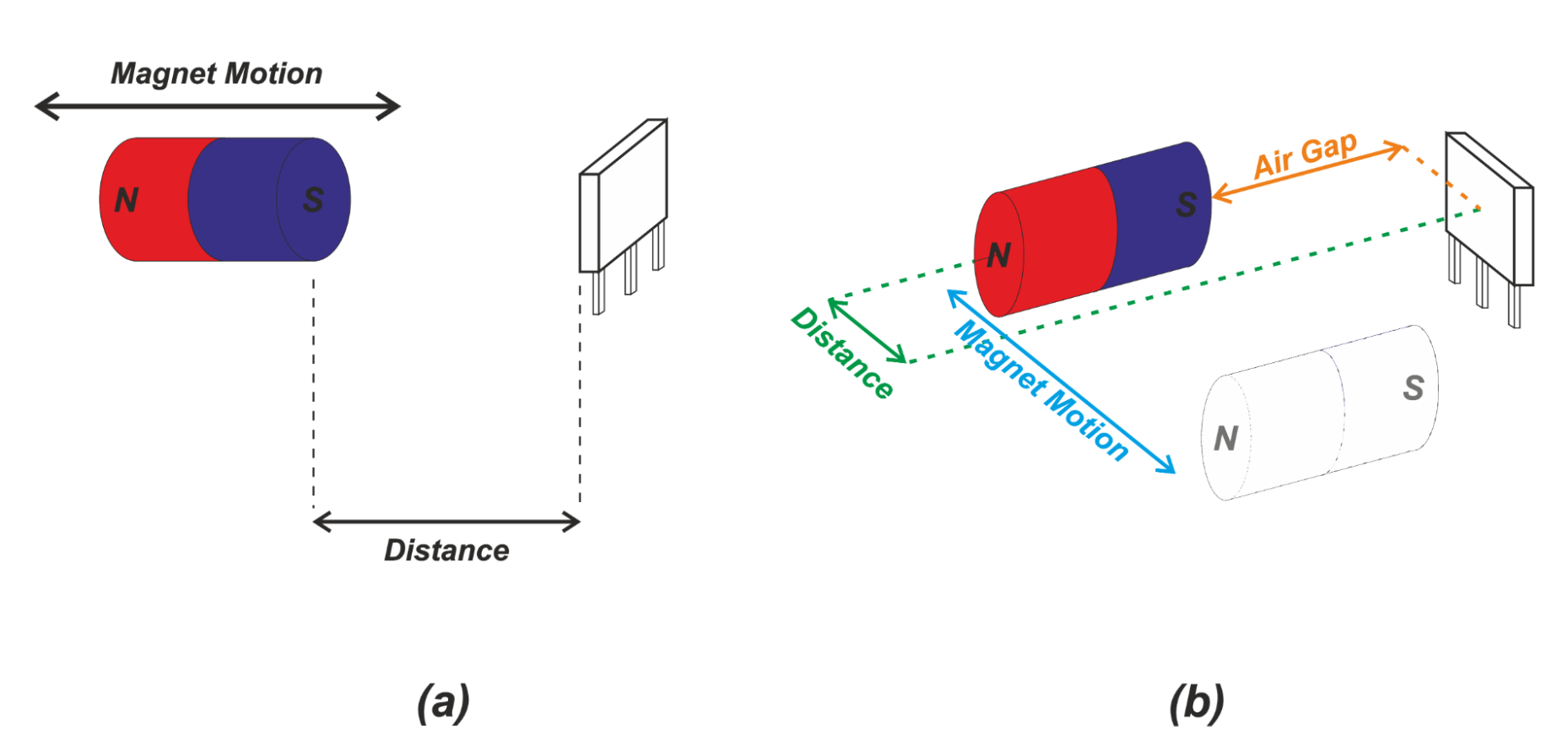
Figura 1 (a). De frente y (b) detección de deslizamiento.
Vimos que la relación entre el campo detectado y la distancia no es lineal con las disposiciones anteriores. Estas configuraciones de sensor magnético se utilizan generalmente como detectores de proximidad en aplicaciones donde los requisitos de precisión no son muy exigentes.
Sin embargo, cuando se requiere un control fino de la posición a lo largo de la carrera de detección, preferimos tener una relación lineal entre la salida del sensor y el desplazamiento. De hecho, aunque podemos usar software para eliminar los errores de linealidad del sensor, es deseable tener una respuesta lineal ya que aumenta la precisión de la medición y facilita la calibración del sistema.
Detección lineal de deslizamiento
La Figura 2 (a) muestra una disposición de deslizamiento que exhibe una relación lineal entre el componente z del campo magnético detectado y el desplazamiento del imán. La Figura 2 (b) muestra la densidad de flujo magnético (en la dirección del eje z) versus el recorrido del imán.
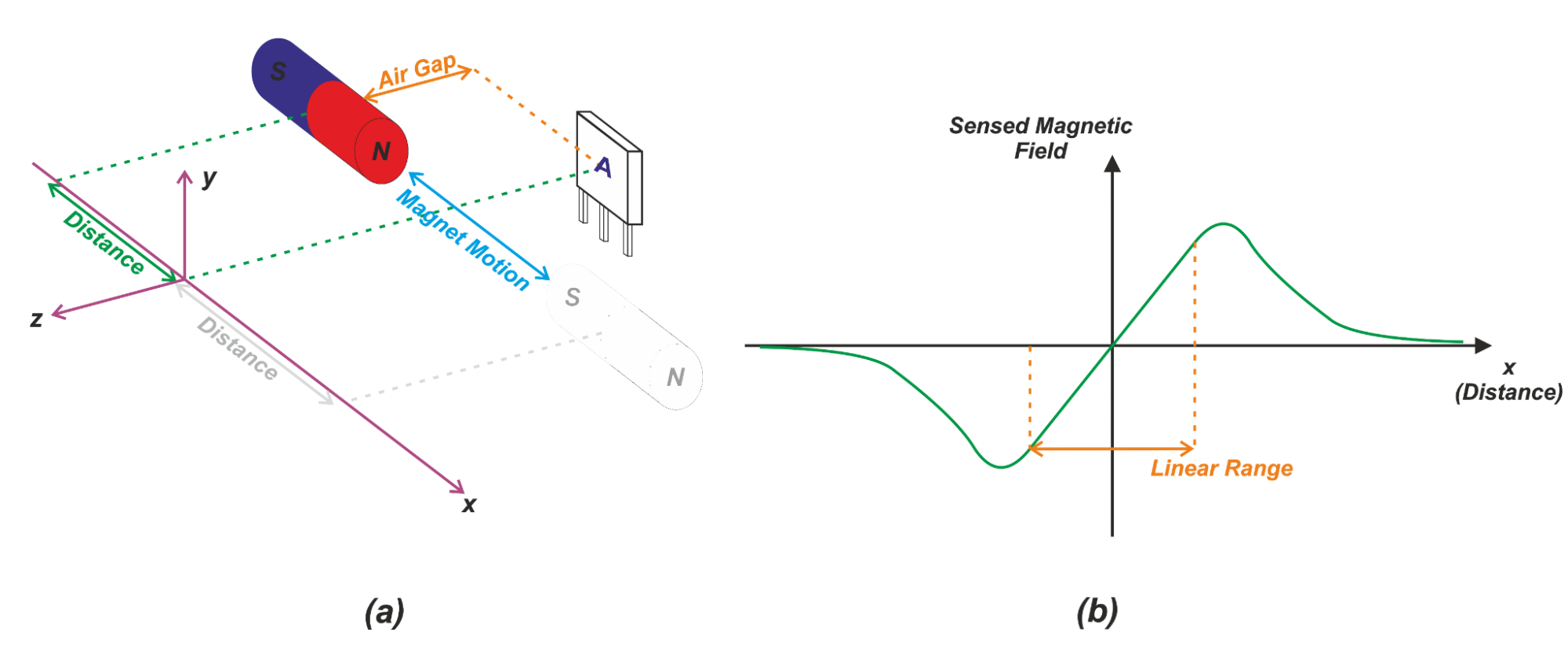
Figura 2 (a). Una configuración de deslizamiento con respuesta lineal (b) densidad de flujo magnético versus posición del imán
Cuando el imán está en el lado izquierdo del sensor (x <0), las líneas del campo magnético del imán producen un componente en la dirección opuesta del eje z. Tenga en cuenta que las líneas de campo van del polo norte al polo sur del imán.
La Figura 3 muestra una de las líneas de campo que atraviesan el sensor.
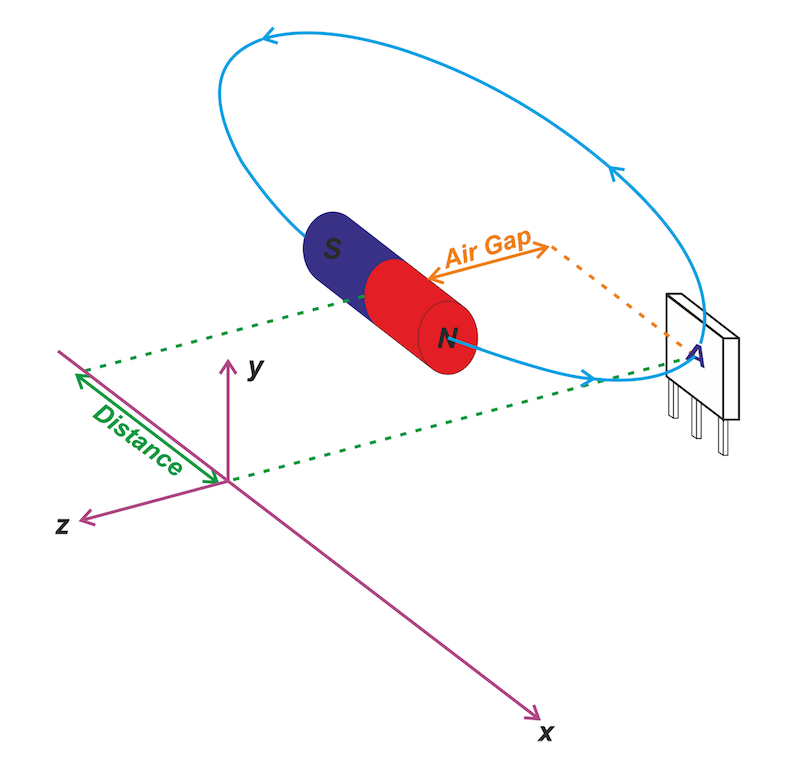
Figura 3. Dirección de las líneas del campo magnético a través de un sensor de efecto Hall
Por tanto, para x <0, el componente z del campo magnético detectado es negativo. Cuando el imán alcanza la posición central, el campo en la dirección z será cero. Para un desplazamiento positivo (x> 0), el campo magnético producirá un componente en la dirección del eje z (campo magnético positivo). Para grandes desplazamientos en cualquier dirección, un número menor de líneas de campo puede atravesar el sensor. Por lo tanto, el campo magnético detectado por el sensor disminuye.
Una de las características clave de esta disposición es que el componente z del campo magnético exhibe una relación lineal con el desplazamiento alrededor del origen. Este rango lineal se muestra en la Figura 2 (b). La longitud de la región lineal es ligeramente menor que la longitud del imán. Por ejemplo, con un imán de 22 mm, la región lineal puede extenderse desde aproximadamente -10 mm a +10 mm. Este comportamiento lineal nos permite detectar con mayor facilidad y precisión la posición de un objeto en movimiento.
¿Qué pasa si necesitamos un rango lineal más grande?
Podemos usar un imán más largo para aumentar el rango lineal de la configuración anterior; sin embargo, ciertas aplicaciones no pueden acomodar un imán grande en el sistema. Además, con imanes largos, el costo puede ser un factor limitante. Si es necesario detectar una carrera más larga que la longitud del imán, podemos utilizar una serie de sensores para ampliar el rango de medición. Esto se muestra en la Figura 4.
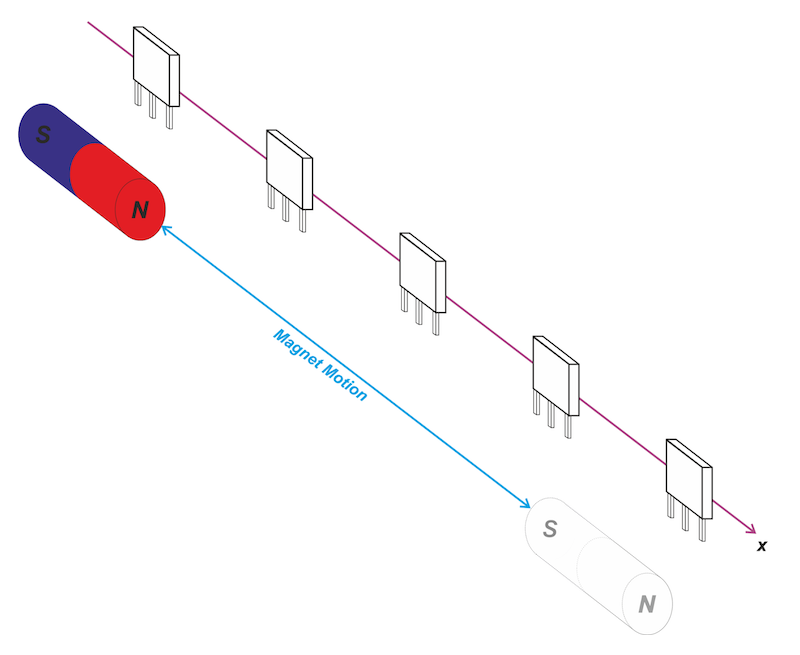
Figura 4. Uso de múltiples sensores de efecto Hall para un mayor rango lineal
En este caso, necesitamos procesar los datos de más de un sensor para encontrar la posición del objeto. Para obtener más detalles, consulte esta nota de aplicación de TI.
Detectar la presencia de un objeto
La configuración de deslizamiento en la Figura 2 también se puede utilizar para detectar la presencia de un objeto (en lugar de determinar la posición del objeto sobre su trazo). Suponga que en el ejemplo que se muestra en la Figura 2 (a), el imán se mueve paralelo al eje x de izquierda a derecha. Suponga que los puntos de operación y liberación magnéticos de nuestro sensor de efecto Hall digital (ENCENDIDO / APAGADO) son los que se muestran en la Figura 5.
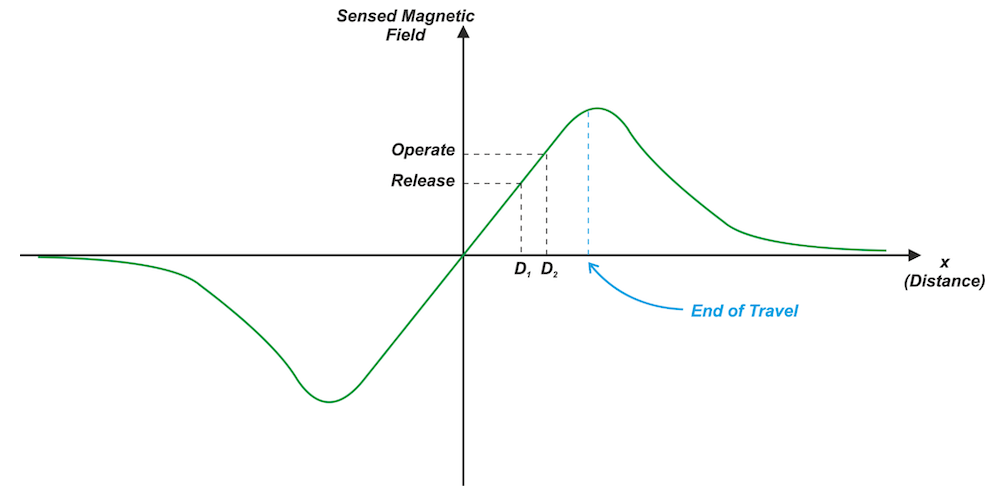
Figura 5. Usando una configuración de deslizamiento para detección de ENCENDIDO / APAGADO
A medida que el imán se acerca al sensor de izquierda a derecha, la intensidad del campo magnético aumenta cada vez más. En D2, el campo magnético detectado es igual al punto de operación magnético que enciende el sensor. Acercar el imán al sensor genera un campo magnético aún mayor y mantiene el sensor ENCENDIDO.
Ahora bien, si movemos el sensor en sentido contrario (de derecha a izquierda), el campo magnético disminuye. En D1, el campo magnético se vuelve más pequeño que el punto de liberación que apaga el sensor. Esto nos permite detectar la presencia del objeto. También podemos usar esta estructura para definir un punto de referencia (el punto de conmutación del sensor) en el trazo del objeto.
De acuerdo con la curva de densidad de flujo magnético versus distancia en la Figura 5, una densidad de flujo magnético dada puede ser producida por dos desplazamientos diferentes. Es por eso que la disposición anterior se usa generalmente en aplicaciones donde la estructura mecánica limita el final del recorrido del objeto de una manera que la conmutación del sensor puede ocurrir solo en un desplazamiento en particular. Esto evita cualquier ambigüedad en la interpretación de los resultados.
Aumento del gradiente de la curva de Gauss frente a la distancia
Hemos comentado anteriormente que se puede utilizar un sensor de efecto Hall digital (ON / OFF) con la configuración de deslizamiento para definir un punto de referencia en el trazo del objeto. Si pudiéramos aumentar la pendiente de la curva de Gauss en función de la distancia, podríamos detectar el punto de referencia con más precisión.
Con una pendiente mayor, un desplazamiento dado conduce a un cambio mayor en la intensidad del campo magnético que puede ser detectado más fácilmente por el sensor. La Figura 6 (a) muestra un sistema magnético que exhibe una pendiente mayor que la de la configuración de la Figura 2 (a).
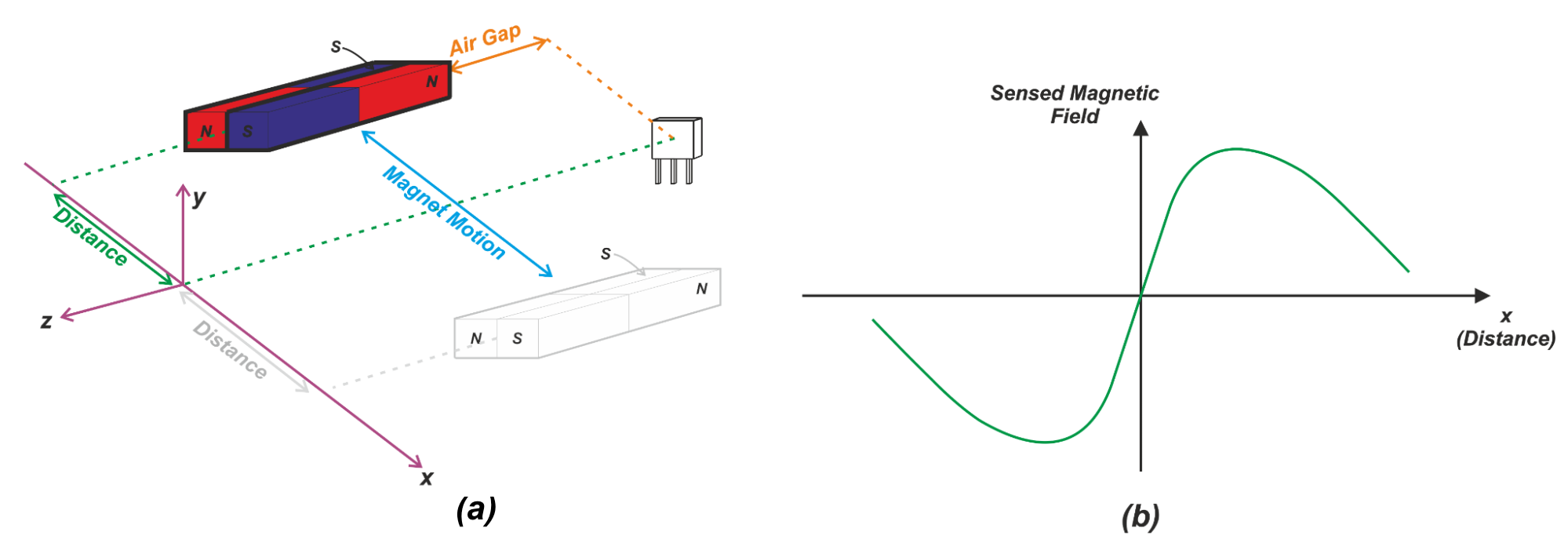
Figura 6. Uso de varios imanes para aumentar la resolución de la intensidad del campo
En este caso, los polos norte y sur de un par de imanes se mueven en relación con el sensor. El campo general está determinado por las líneas de campo de ambos imanes. En esta disposición, la distancia se mide con respecto al centro del par de imanes. La Figura 6 (b) muestra la componente z del campo magnético detectado en función de la distancia. En la posición central (x =0), el número de líneas de campo desde el polo norte de un imán que atraviesa el sensor es igual al número de líneas de campo desde el polo sur del otro imán. Por lo tanto, la densidad de flujo magnético neto es cero.
Suponga que movemos el imán hacia la derecha desde la posición central (x> 0). Esto aumenta abruptamente el número de líneas de campo desde el polo sur y crea un campo magnético con un componente z positivo. De manera similar, cuando movemos el imán hacia la izquierda desde la posición central (x <0), obtenemos un campo magnético relativamente fuerte con un componente z negativo. Alrededor del origen, el gradiente de la curva es mayor que el de la configuración de deslizamiento en la Figura 2 (a) porque la transición de los polos norte a sur ocurre abruptamente. Esta pendiente relativamente mayor de la curva de Gauss en función de la distancia puede ayudarnos a definir la posición de referencia de un objeto en movimiento con más precisión.
Hay otras dos variantes interesantes de esta configuración deslizante. Una versión separa los dos imanes por una pequeña distancia fija. Esto nos permite tener una transición menos abrupta de los polos norte a sur y, por lo tanto, ajustar la pendiente de la respuesta alrededor del origen. Otra versión usa una combinación de tres imanes. Esto puede crear una respuesta simétrica con grandes pendientes en cualquier dirección. Una respuesta simétrica puede resultar útil cuando se detecta una desviación de una línea central. Para obtener más información sobre estas dos configuraciones, consulte el manual “Detección y aplicaciones de efecto Hall” de Honeywell.
Para ver una lista completa de mis artículos, visite esta página.
Sensor
- Sensor de posición del acelerador - Principio de funcionamiento y aplicaciones
- Uso y aplicaciones del sensor de efecto Hall.
- Future Electronics:plataforma de desarrollo rápido para imágenes térmicas y detección de infrarrojos
- ADI:impedancia y potenciostato AFE para detección biológica y química
- Infineon lanza el sensor Hall lineal integrado monolíticamente para sistemas ASIL D
- Ambarella, Lumentum y ON Semiconductor colaboran en la detección 3D basada en procesamiento de IA para dispositivos AIoT de próxima generación
- Materiales de detección suave y autorreparación para manos y brazos robóticos
- Mesa redonda ejecutiva:Detección e IIoT
- Dispositivos fotónicos basados en grafeno para la detección remota
- Conexiones para Control:Interfaces de Comunicaciones para Sensores de Posición y Movimiento
- Detección de campos magnéticos