


Postprocesadores de robots:todo lo que necesita saber
¿No sabe qué posprocesador elegir? Aquí hay 5 pasos para elegir el posprocesador de robot perfecto.
Los posprocesadores son el puente entre el software de programación fuera de línea y su robot.
Si elige el posprocesador correcto, su programa funcionará de forma inmediata:el robot real se moverá exactamente como lo hizo en la simulación. Sin embargo, si elige el posprocesador incorrecto, se enfrentará a un momento difícil:el robot podría moverse de manera errática, podría moverse en la dirección incorrecta o podría no moverse en absoluto.
RoboDK proporciona muchos posprocesadores diferentes para elegir. Vale la pena familiarizarse con el funcionamiento de los posprocesadores, cómo elegir el correcto y cómo personalizar o crear su propio posprocesador si los que se proporcionan no son exactamente adecuados para usted.
Este artículo le dirá todo lo que necesita saber sobre los postprocesadores de robots en RoboDK.
¿Qué es un posprocesador?
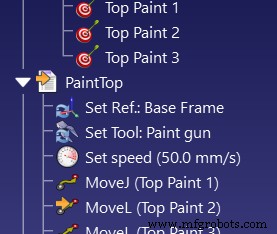
La mayoría de los programas de robots contienen los mismos comandos básicos, que se utilizan una y otra vez. Los tres más comunes son:
- Mover articulación — Esto mueve el robot a un punto en el espacio enviando las articulaciones del robot a la posición deseada de la manera más rápida posible, lo cual es útil cuando se mueve por el espacio libre.
- Mover lineal — Esto mueve el robot desde la posición actual hasta un punto en el espacio siguiendo una línea precisa, lo cual es útil cuando se mueve para recoger un objeto, pintar, etc.
- Establecer velocidad — Esto define la velocidad del efector final y/o las articulaciones del robot.
El software de programación fuera de línea crea programas utilizando una versión generalizada de estos (y otros) comandos que pueden aplicarse a cualquier robot.
Los robots hablan diferentes idiomas
El problema es que cada fabricante diferente tiene una forma diferente de programar comandos en sus robots. Muchos fabricantes tienen su propio lenguaje de programación personalizado y algunos incluso usan comandos ligeramente diferentes para diferentes versiones de sus controladores.
Por ejemplo, así es como se expresan los tres comandos que enumeré anteriormente para diferentes controladores de robot. Entre paréntesis, también mostré la cantidad mínima de parámetros y valores necesarios para controlar un robot 6DoF:
| Robot | Movimiento conjunto | Movimiento lineal | Establecer velocidad | Redondeo de ruta |
| ABB IRC5 | MovimientoJ (4) | Movimiento (4) | datos de velocidad(4) | datos de zona(4) |
| Fanuc RJ3 | J (2) | L (2) | velocidad (1) | CNT (1) |
| Kawasaki | JMOVER (1) | LMOVE (1) | VELOCIDAD (1) | EXACTITUD (1) |
| KUKA KRC | PTP (1) | LIN/SPL (1) | $VEL.CP (1) | $APO.CDIS (1) |
| MotomanJBI | MOVJ (2) | MOVL (2) | VJ/V (1) | PL (1) |
| Robots universales | movej (1) | movimiento/movimiento (1) | v(1) | r (1) |
Como puede ver, cada comando es similar entre cada tipo de robot. Sin embargo, existe una diferencia en la redacción y en la cantidad de información requerida para definir cada instrucción.
Sin la programación fuera de línea y los posprocesadores, tendría que aprender un lenguaje de programación completamente nuevo cada vez que programe un nuevo tipo de robot. Esto ralentiza significativamente la programación del robot.
Los posprocesadores lo hacen más fácil
Los posprocesadores funcionan traduciendo los comandos a un programa específico para su modelo de robot.
Con RoboDK, no tienes que aprender un lenguaje de programación para que tu robot se mueva. Los posprocesadores proporcionados suelen ser suficientes para generar código utilizable y sin errores para más de 30 marcas de robots.
El posprocesador también genera todo el código de iniciación necesario y las definiciones de variables, que a menudo son una molestia para definir en la programación normal basada en texto.
5 pasos para elegir el posprocesador perfecto
RoboDK viene empaquetado con más de 40 posprocesadores. Debe elegir el posprocesador adecuado para el controlador de su robot.
¿Cómo eliges entre ellos?
Si ha utilizado uno de los robots de nuestra biblioteca de robots, encontrará que un posprocesador ya está seleccionado como predeterminado. A menudo, esto supone que está utilizando el controlador más reciente (o predeterminado) para ese robot. Sin embargo, es posible que deba seleccionar otro si la publicación predeterminada no se adapta a las necesidades de su aplicación o configuración.

1. Elija el posprocesador para su marca de robot
Por lo general, es mejor probar primero el posprocesador predeterminado o el más básico.
Algunas marcas de robots solo tienen una opción predeterminada en RoboDK, p. Mecademic, Kawasaki, CLOOS, etc. En este caso, su elección es muy sencilla.
2. Elija el posprocesador para su controlador
Algunas marcas de robots tienen diferentes posprocesadores para diferentes controladores o versiones de su lenguaje de programación. Por ejemplo, Denso tiene un posprocesador para sus controladores RC7 más antiguos y otro para sus controladores RC8 más nuevos, ya que entre estos modelos pasaron de la programación en el lenguaje de programación PAC a la programación en PacScript.
Use el posprocesador para su controlador específico si hay uno disponible. Si no hay ninguna opción para su controlador específico, pruebe con la que se acerque más al número de versión de su controlador.
3. Elija el posprocesador para su aplicación
Algunas marcas de robots tienen bastantes posprocesadores diferentes. ¡KUKA tiene 10!
Algunos de los posprocesadores adicionales son para aplicaciones o configuraciones específicas. Por ejemplo, hay 5 postprocesadores para el controlador KUKA KRC2. Dos de ellos son para aplicaciones que utilizan su complemento de fresado CamRob o el control CNC de KUKA, que permite tener miles de líneas de código en un archivo de programa (adecuado para el mecanizado de robots). Uno es específicamente para aplicaciones de soldadura por arco. Del mismo modo, hay un posprocesador UR que integra pinzas Robotiq.
Si hay un posprocesador para su controlador que sea correcto para su aplicación o configuración específica, utilícelo. Sin embargo, si no hay ninguno para su aplicación, simplemente use el posprocesador básico para su marca y controlador.
4. Elija el posprocesador que pueda actualizar fácilmente
A veces, el programa generado por RoboDK no será exactamente el adecuado para su aplicación. Es posible que desee agregar líneas de código adicionales para ampliar la funcionalidad. Esto es muy fácil de hacer si está un poco familiarizado con el lenguaje de programación de su robot.
Se proporcionan algunos de los posprocesadores para que sea más fácil cambiar y actualizar el código generado.
Por ejemplo, el KUKA KRC2 tiene opciones que generan un archivo DAT. Estas son una característica interesante del controlador KUKA. En esta configuración, las posiciones se almacenan como variables en un archivo DAT separado, lo que a veces puede facilitar la actualización del código, ya que solo necesita cambiar las variables para modificar las posiciones.
Del mismo modo, existen dos postprocesadores Siemens Sinumerik:uno en el que las posiciones se proporcionan en milímetros y otro en el que se proporcionan en pulgadas.
Elija el posprocesador que le facilite al máximo la actualización del código del robot, en caso de que lo necesite.
5. Crear o personalizar un posprocesador
En algunas circunstancias, es posible que deba escribir su propio posprocesador, como cuando usa su robot en una configuración única.
Es posible que también desee personalizar un posprocesador existente para su configuración o aplicación específica.
Es muy fácil escribir posprocesadores personalizados en RoboDK, ya que todos ellos son programas de Python y están escritos en un formato similar.
Puedes ver un tutorial simple que muestra cómo crear o actualizar un posprocesador en este video.
Consulte la página del posprocesador en nuestra documentación para obtener más detalles.
¿Qué preguntas tiene sobre los posprocesadores? Cuéntenos en los comentarios a continuación o únase a la discusión en LinkedIn
Robot industrial
- Computación en la nube:todo lo que necesita saber
- Contenedores vs. Sin servidor; ¡Todo lo que necesita saber!
- Mantenimiento subcontratado de un vistazo:todo lo que necesita saber
- Todo lo que necesita saber sobre las dispersiones de pigmentos
- Sistemas de seguimiento de contenedores:todo lo que necesita saber
- Estrategia de planificación de capacidad:todo lo que necesita saber
- Todo lo que necesita saber sobre IoT en mantenimiento
- 9 pasos para forjar un cuchillo:todo lo que necesitas saber
- Todo lo que necesitas saber sobre dibujos técnicos
- Todo lo que necesita saber sobre la fundición de metales
- Reparaciones de embragues industriales:todo lo que necesita saber