


Los 5 pasos para lograr un conformado incremental robótico de calidad
La formación incremental robótica es rentable para la formación de hojas en lotes pequeños. Este estudio de caso muestra cómo un equipo logró la calidad con RoboDK.
Mario Guillo y su equipo son investigadores del Institut Maupertuis de Francia, que se especializa en investigación industrial.
El equipo notó algunos problemas con los métodos tradicionales de conformado de láminas de metal... y decidieron resolverlos.
Por qué la formación de hojas en lotes pequeños es costosa
La formación de láminas de metal es un juego de números. Si está fabricando una gran cantidad de piezas idénticas, el costo y el tiempo generalmente se equilibrarán. Sin embargo, si está fabricando solo una o dos partes, rápidamente se vuelve antieconómico.
La embutición profunda es uno de los métodos más comunes de formación de hojas. Implica diseñar y fabricar un troquel, luego "estirar" lentamente cada hoja de material sobre el troquel. Cuando fabrica solo unas pocas piezas, el costo del troquel supera con creces el costo de la formación en sí.
Tradicionalmente, la forma en que la mayoría de los fabricantes han abordado este problema es simplemente aceptarlo. “Bueno, así es la vida”, dices. Cruza los dedos y espera que el resto de nuestras operaciones de mecanizado equilibren este proceso ineficiente. O, si la calidad no es importante, puede optar por formar la hoja a mano.
Mario y su equipo decidieron que no tenía por qué ser así. Existe un método para formar productos de calidad que es económico para lotes pequeños:la formación incremental.
En este estudio de caso, mostramos cómo Mario y su equipo usaron RoboDK para crear productos de calidad de manera económica con la formación incremental robótica.
¿Qué es la formación incremental robótica?
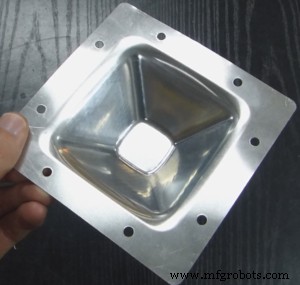
 El conformado incremental (también conocido como conformado incremental de láminas) es una alternativa al embutido profundo que implica deformar el material laminar poco a poco. poco a poco, capa por capa. De esta forma, es un poco como la impresión 3D o el mecanizado CNC. En lugar de agregar o quitar material en cada capa, el material de la hoja se dobla muy ligeramente con cada capa.
El conformado incremental (también conocido como conformado incremental de láminas) es una alternativa al embutido profundo que implica deformar el material laminar poco a poco. poco a poco, capa por capa. De esta forma, es un poco como la impresión 3D o el mecanizado CNC. En lugar de agregar o quitar material en cada capa, el material de la hoja se dobla muy ligeramente con cada capa.
Desde la década de 1990, la formación incremental se ha logrado utilizando máquinas CNC modificadas. La herramienta CNC se reemplaza con una esfera de un solo punto que dibuja la forma deseada en el material de la hoja para cada capa. Se utiliza un lubricante para reducir el efecto de la fricción.
Las máquinas CNC modificadas son una buena solución, pero tienen un problema:son costosas para piezas más grandes. Esto puede hacer que sea inviable para las empresas que desean utilizar la formación incremental para la creación de prototipos, que es una aplicación común.La formación incremental robótica supera este problema mediante el uso de un robot industrial para sujetar la herramienta. Comparte similitudes con el mecanizado de robots que presentamos en una publicación anterior.
A diferencia de las máquinas CNC, el robot no limita el tamaño de la pieza. Como resultado, el equipo de Mario cree que la formación incremental robótica podría usarse para una amplia gama de aplicaciones que requieren la formación de láminas grandes, incluidos implantes craneales, prótesis y paneles de automóviles.
5 pasos para lograr un conformado incremental robótico de calidad
La formación incremental robótica es sorprendentemente fácil... pero solo si sigue los pasos correctos. El equipo utilizó los siguientes cinco pasos (como se describe en su trabajo de investigación) para lograr un producto de calidad con la formación incremental robótica:
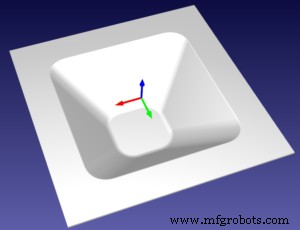
1. Construye el modelo 3D
Casi todos los productos están diseñados en paquetes CAD (diseño asistido por computadora), por lo que este paso debería ser simple. Debe definir la forma que desea fabricar y crear un modelo 3D de la misma.
2. Generar una trayectoria
Luego, debe generar una trayectoria CNC. Esto se puede hacer en muchos paquetes CAM (Fabricación asistida por computadora). Incluso puede generar el modelo y la trayectoria en el mismo software. Sin embargo, si su software CAD/CAM no tiene esta función, un programa CAM económico como CamBam, MeshCAM o FreeMILL puede ser una buena opción.
El equipo usó el software CamBam CNC, que es una herramienta rentable para diseñar y construir modelos y trayectorias CNC.
Durante este paso, deberá decidir la profundidad de cada capa y la estrategia de estratificación. El equipo explicó que hay dos estrategias comunes para piezas simples:
- Estrategia de capa Z — Esta estrategia simple consiste en dibujar cada capa por separado, sangrando al comienzo de cada capa.
- Estrategia en espiral — Esta estrategia un poco más compleja consiste en dibujar una línea continua que se extiende en espiral desde la parte superior del formulario hasta la parte inferior. Esto produce una pieza más suave e impone fuerzas más bajas sobre el robot.
3. Generar código G
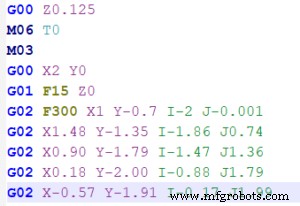
Una vez que tenga su trayectoria, el siguiente paso es para convertirlo en instrucciones que una máquina CNC pueda entender. La opción más común es G-Code, pero también puede usar APT-CLS o NCI.
Con la formación incremental tradicional basada en CNC, este sería el último paso antes de la producción. Sin embargo, como estamos usando robots, hay otro paso, muy importante.
4. Convierta el código G en comandos de robot
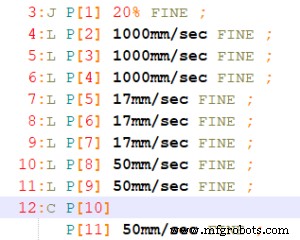
Para usar un robot para la formación incremental, necesita convertir el código G en comandos que el robot entienda. Sin embargo, cada fabricante de robots tiene su propio lenguaje de programación. Algunos fabricantes tienen complementos de software CNC especializados, pero a menudo son muy costosos y solo funcionan con su marca de robot.
Mario y su equipo decidieron usar RoboDK ya que incluye una herramienta de mecanizado de robot como estándar. Es muy fácil de usar y es más rentable que otras opciones en el mercado. Simplemente carga el archivo G-Code en el software y genera la ruta del robot automáticamente, evitando errores de robot.
5. Transferir el programa al robot
El paso final es transferir el programa al robot y comenzar el proceso de formación incremental. Si todos los pasos anteriores han ido bien, esto debería ser bastante sencillo. Sin embargo, hay dos puntos que debes tener en cuenta:
- Elige un robot de alta rigidez: Los robots tienen una rigidez menor que las máquinas CNC. Esto puede hacer que la herramienta se desvíe cuando se aplican fuerzas muy altas, lo que puede ocurrir en tareas de mecanizado. El equipo usó un robot de carga pesada (con una carga útil de más de 500 kg) para garantizar que tuviera la rigidez suficiente para la tarea.
- Evite el material innecesariamente grueso: El material grueso será difícil de formar con el robot debido a su baja rigidez. Elija solo el grosor del material que se requiere para su producto y prepárese para usar un material más delgado si comienza a ver desviaciones de la herramienta.
La primera vez que ejecute el programa, esté atento a cualquier desviación de la herramienta que pueda deberse a la aplicación de fuerzas excesivas a la herramienta del robot.
Aquí hay un video del proyecto del equipo:
Este trabajo ha sido realizado por el Institut Maupertius con la colaboración de Halcyon performance.
Robot industrial
- Los 3 pasos básicos de la impresión 3D
- Sistemas de soldadura robóticos:elegir el adecuado
- 3 Tendencias en el manejo de materiales robóticos en el sector industrial
- La importancia de administrar el flujo de trabajo de soldadura robótica
- Las ventajas de las pistolas de soldadura robóticas de brazo pasante
- Soldadura robótica frente a soldadura manual:mejora de la calidad y la eficiencia
- 5 aplicaciones robóticas en la industria aeroespacial
- Siete pasos para garantizar la calidad en toda la cadena de suministro
- La guía definitiva para paletizadores robóticos
- Actualización de los documentos de calidad
- Mecanizado robótico:la próxima dimensión