


Tipos de articulaciones de robot:una guía detallada
Fuente:www. idtechex.com
La automatización en la industria manufacturera está ganando impulso rápidamente con más empresas que adoptan el uso de la robótica. Esto se atribuye a los beneficios de la automatización en los negocios y al uso de procesos más inteligentes e inteligentes. Puede tener más producción y también reducir el riesgo de lesiones en la planta de fabricación. La mayoría de las empresas se inclinan por el uso de brazos robóticos para realizar tareas de pick &place, embalaje, pintura y montaje, entre otras tareas.
Fuente:www. researchgate.net
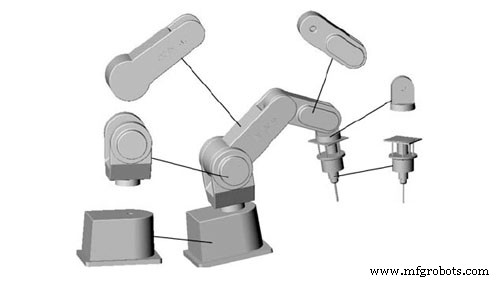
Las articulaciones del robot se refieren a los componentes móviles del robot que dan como resultado movimientos relativos entre enlaces adyacentes. En este contexto, los enlaces se utilizan para referirse a los miembros rígidos que conectan las juntas para un funcionamiento claro y adecuado. Esto demuestra que el brazo robótico industrial presenta el uso de una combinación de enlaces y uniones para una funcionalidad óptima. Es esencial asegurarse de que las articulaciones de su manipulador funcionen en consecuencia para garantizar que haya precisión y exactitud durante una aplicación.
Las articulaciones robóticas también se denominan a veces ejes. Son esenciales y son útiles para garantizar que el movimiento del brazo no se limite o interfiera. Aprender más sobre las articulaciones robóticas lo ayudará a determinar el tipo de brazo robótico con el que desea trabajar según las tareas que desee realizar. Fuente:www. britannica.com
Dado que se utilizan diferentes tipos de robots en la industria de fabricación, también encontrará una variedad de juntas mecánicas. Estas articulaciones difieren en términos de movimiento y también de aplicación, especialmente cuando se trata del tipo de robot que se utilizará.
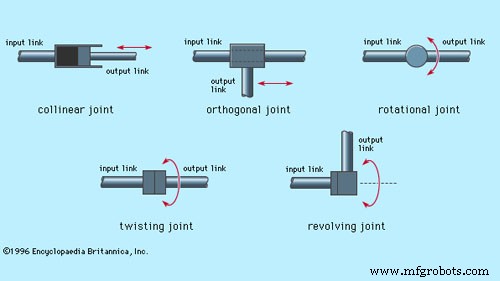
En lo que respecta a las articulaciones mecánicas de los brazos robóticos, hay cinco tipos principales que debe considerar. Dos de las articulaciones son lineales, lo que significa que el movimiento relativo entre los enlaces adyacentes es de traslación. Por otro lado, los otros tres son giratorios, lo que significa que el movimiento relativo de los eslabones implica rotaciones entre ellos. Los cinco tipos de juntas mecánicas para robots incluyen:
En las uniones lineales, el movimiento relativo que presentan los eslabones adyacentes debe ser paralelo. Esto significa que los enlaces de entrada y salida se deslizan en un movimiento lineal. Este tipo de movimiento da como resultado un movimiento de traslación. Este tipo de movimiento lineal se puede lograr de varias formas, incluido el uso del mecanismo telescópico y el pistón. Este tipo de articulación también se conoce como articulación en L.
Las juntas ortogonales también se conocen popularmente como juntas tipo O. Presentan un movimiento relativo tomado por el enlace de entrada y el enlace de salida. Este tipo de movimiento involucrado en las articulaciones ortogonales es un movimiento deslizante de traslación. Sin embargo, a diferencia de la disposición de juntas lineales, con la junta ortogonal, el enlace de salida es perpendicular al enlace de entrada.
Cuando se trata de las articulaciones de rotación, encontrará el uso de movimientos relativos de rotación que son útiles para los manipuladores de robots que trabajan en múltiples espacios de trabajo. Estos movimientos se realizan con el eje de rotación perpendicular a los ejes de los enlaces de entrada y salida. Estas juntas rotacionales también se conocen como juntas Tipo R.
Este tipo de articulación presenta un movimiento rotatorio que también da como resultado cierto grado de rotación cuando está en uso. El movimiento en estas articulaciones es relativo al eje de rotación que es perpendicular a los ejes de los enlaces de entrada y salida. Las juntas de torsión también se conocen como juntas de tipo T.
En las articulaciones giratorias, las cosas son un poco diferentes en comparación con las demás. Estas articulaciones también cuentan con un movimiento de rotación que es útil en diferentes aplicaciones. El movimiento de estas articulaciones se caracteriza por el movimiento entre los dos eslabones. El eje del enlace de entrada está diseñado para ser paralelo al eje de rotación de la articulación. Por otro lado, el eje del enlace de salida está diseñado para ser perpendicular al eje de rotación de la articulación. Este tipo de junta también se conoce como junta Tipo V. Fuente:www. technologyreview.com
Diferentes robots contarán con el uso de diferentes tipos de juntas mecánicas. Aprender más sobre los diferentes robots lo pondrá en una mejor posición para invertir en un robot que funcione para usted. Algunos de los robots más comunes a considerar incluyen:
El diseño del robot articulado probablemente vendrá con diferentes rangos y combinaciones de juntas giratorias. Esta gama puede incluir estructuras simples de 2 articulaciones y moverse a estructuras más complejas con 10 o más articulaciones. Con este diseño, el brazo se conecta a la base con el uso de una articulación giratoria, mientras que los eslabones del brazo están conectados mediante articulaciones giratorias.
Con los robots cartesianos, el diseño presenta el uso de tres juntas lineales. Estas articulaciones se presentan en el plano cartesiano que involucra a X, Y y Z. Estos robots también pueden presentar una muñeca adjunta con articulaciones de rotación más fáciles para el movimiento. Este tipo particular de robot también se conoce como rectilíneo o pórtico.
El robot cilíndrico cuenta con una articulación giratoria que se adjunta a la base y una articulación lineal que se utiliza para conectar los diferentes eslabones. Dado que los robots cilíndricos trabajan dentro de un ámbito de trabajo de forma cilíndrica, el movimiento lineal y de rotación resultan útiles para garantizar la precisión.
En el diseño polar de los robots, el brazo se conecta a la base mediante una articulación giratoria. A veces también encontrará el uso de una combinación de dos juntas giratorias y una junta lineal. Dado que este robot también se conoce como robot esférico, el alcance de trabajo que se presentará también será esférico. Los ejes utilizados en este robot forman un sistema de coordenadas polares que permite al manipulador trabajar con facilidad.
El robot SCARA es una opción popular entre muchos fabricantes, especialmente aquellos que buscan automatizar sus procesos de ensamblaje. Este robot suele ser cilíndrico y trabaja en un ámbito de trabajo relativamente cilíndrico. Cuenta con el uso de dos juntas paralelas que resultan útiles en el proceso de montaje. Estas uniones proporcionan cumplimiento en un plano seleccionado mientras el robot está en uso.
Los robots delta están diseñados con una estructura en forma de araña que les permite ofrecer excelentes servicios a sus usuarios. Se construyen a partir de paralelogramos que se unen y conectan a una base común. Las articulaciones de este tipo de robot son tanto rotativas como lineales. Esto permite que el robot mueva un solo extremo de las herramientas del brazo en un área de trabajo con forma de cúpula. Mejora su rendimiento para asegurar que el desarrollo de las diferentes tareas se lleve a cabo con precisión.
Al trabajar con la robótica como medio para automatizar diferentes procesos en su negocio, debe tener en cuenta los diferentes aspectos. Estos aspectos juegan un papel muy importante en el rendimiento de la robótica específica que elija utilizar. Cuando se trata de usar brazos robóticos industriales, las articulaciones del robot deben ser algo sobre lo que mantenerse actualizado.
Conozca las diferentes articulaciones y cómo afectan el rendimiento del robot. Esto le ayudará a evaluar el tipo de articulaciones que mejor se adaptan a las actividades que desea automatizar. Una vez que tenga eso, puede invertir en brazos robóticos que vienen con las articulaciones que busca en el mercado. Tómese su tiempo y trabaje con los fabricantes de equipos de automatización que lo ayudarán. 
Al incorporar brazos robóticos a su negocio, asegúrese de trabajar con un fabricante de brazos robóticos de calidad que le ofrezca lo mejor. Además, también es fundamental tener un conocimiento básico de lo que implican. El brazo robótico presenta el cuerpo, la muñeca y el efector final que tienen funciones específicas. Para que estas diferentes partes funcionen con precisión, es necesario que existan juntas robóticas. En este artículo, profundizaremos en las diferentes articulaciones robóticas para brindarle una mejor comprensión. Tabla de contenido
¿Qué son las articulaciones de robot?
Tipos de juntas mecánicas para robots
Uniones lineales
Juntas ortogonales
Juntas rotacionales
Juntas retorcidas
Juntas giratorias
Diferentes tipos de robots y las juntas mecánicas utilizadas

Articulado
cartesiano
Cilíndrico
Polar
SCARA
Delta
Conclusión
Robot industrial
- Tipos de datos de C++
- Tipos de datos C
- ¿Es SFM en Mecanizado?
- Los 10 mejores fabricantes de robots industriales en 2020
- Robots industriales:la guía definitiva
- Robótica en la fabricación de automóviles
- Robot Warehouse System:qué es y cómo se usa
- Robot Gripper:qué es y cómo se usa para robots
- ¿Cuáles son los beneficios de los brazos robóticos para los seres humanos?
- Robot Vision:Una guía que todo fabricante debe conocer
- Automatización industrial