


Singularidad robótica:Qué hay en los brazos robóticos
Fuente:www. idtechex.com
El uso de brazos robóticos en la industria manufacturera está en aumento y más empresas están aprovechando los beneficios del uso de brazos robóticos. Si planea incorporar brazos robóticos en sus procesos comerciales, debe asegurarse de estar bien informado. Busque un fabricante de brazos robóticos de calidad con el que pueda trabajar para obtener resultados de calidad.
El brazo robótico presenta el cuerpo, la muñeca y también el efector final. El efector final es lo que se utiliza para aferrarse a diferentes productos o realizar diversas tareas. En la mayoría de los casos, necesitará que el efector final se mueva en diferentes direcciones con precisión. Aquí es donde debe asegurarse de conocer la singularidad del robot y cómo afecta el rendimiento de su brazo robótico. En este artículo profundizamos en la singularidad del robot y por qué es fundamental tenerlo en cuenta. Fuente:www. technologyreview.com
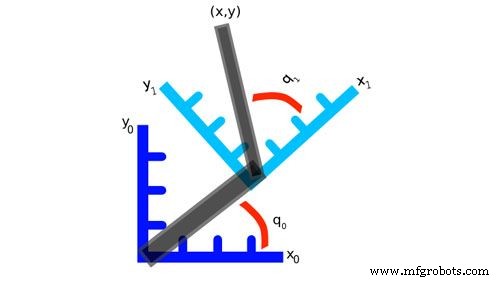
La singularidad del robot se refiere a una configuración en la que el movimiento del efector final del robot se bloquea en determinadas direcciones. Esta configuración da como resultado un límite a la eficiencia y precisión del brazo robótico con el que está trabajando. Generalmente, cuando se trata de brazos robóticos de 6 ejes, funcionan moviéndose en movimientos relativos a los ejes X, Y y Z en un plano 3D o cartesiano. Consta de 6 articulaciones que contribuyen a los 6 grados de libertad que experimenta el brazo robótico mientras está en acción.
Este grado de libertad permite que el brazo robótico se mueva en diferentes direcciones y logre fácilmente las tareas para las que está diseñado. Si, por casualidad, el efector final del robot no puede llegar a los productos o se mueve en la dirección incorrecta, aquí es donde entra en juego el problema de la singularidad. Algunas singularidades son bastante fáciles de identificar y resolver, lo que le permite regresar a su Tareas. Sin embargo, por otro lado, algunos robots experimentarán singularidades más difíciles de identificar a menos que con la ayuda de fórmulas complejas y extensas. Fuente:www. mecademic.com
La singularidad del robot presentará diferentes efectos y también desafíos, especialmente al identificar los problemas específicos. Estos desafíos varían según algunos factores que aparecen en el brazo robótico con el que trabajará. La complejidad y la gravedad de la singularidad experimentada por su robot dependen del número de articulaciones, el tipo de robot (lineal o giratorio) y la disposición geométrica.
Un brazo de robot industrial cuenta con dos espacios donde se puede controlar fácilmente. Este suele ser el espacio articular y el espacio cartesiano. Con los diferentes espacios donde opera el brazo robótico, encontrará que contará con dos conjuntos de comandos de movimiento en modo de posición.
Cuando se trata de los comandos de espacio articular, el robot recibirá instrucciones específicas con el conjunto deseado de espacios articulares. Luego se moverá para llevar cada articulación al posicionamiento articular sugerido en una traducción lineal y simultánea. Con los comandos del espacio cartesiano, la sugerencia al robot presentará la pose deseada para el efector final con una trayectoria cartesiana específica. El camino cartesiano está diseñado para ser lineal o circular.
Para que el robot se alinee con precisión con la articulación cartesiana y los comandos, el controlador del robot calcula la posición inversa y la cinemática de velocidad del robot. Esto da como resultado el posicionamiento correcto del efector final para llevar a cabo la tarea diseñada. Sin embargo, si los cálculos son incorrectos, entonces las singularidades ocurren donde encuentra que el efector final no está posicionado con precisión. Esto le muestra las configuraciones que desea evitar para evitar que los problemas de singularidad obstaculicen sus procesos de automatización. Fuente:www. dignited.com
Deben evitarse a toda costa las singularidades otorgadas por los robots para garantizar que su brazo robótico industrial pueda funcionar de la mejor manera en las tareas deseadas. Aprender más sobre la función de la singularidad del robot le dará una mejor comprensión de por qué debe intentar evitarlo. La singularidad del robot se asocia principalmente con dos funciones distintas. Fuente:studywolf. wordpress.com
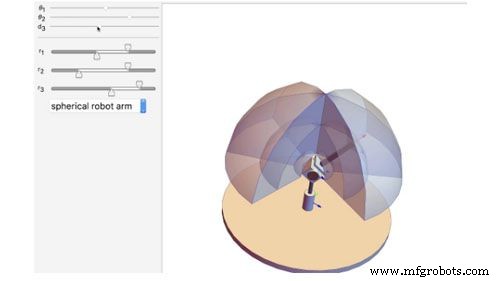
Considere dos robots cartesianos utilizados para orientar sus efectores finales en diferentes direcciones. Los dos robots cuentan con posicionamiento de seis ejes con pilas de tres guías lineales ortogonales y tres etapas de rotación. Cuando el robot utilizado puede mantener los ejes y las articulaciones donde deben estar, la orientación del efector final es fácil.
Puede usar continuamente el efector final a lo largo de la ruta 6D dentro de su espacio de trabajo mientras mantiene precisión y exactitud. Sin embargo, cuando los ejes y las articulaciones coinciden, se produce una singularidad y el robot ya no puede moverse con los 6 grados de libertad de que dispone.
Con este robot, encontrará que no puede girar su efector final sobre los ejes que coinciden con las articulaciones revolucionarias. Este tipo de singularidad a menudo se conoce como bloqueo de cardán. Dado que la mayoría de las singularidades se resuelven con la ayuda de ecuaciones, es más difícil determinar la velocidad de ciertos vectores cartesianos. Cuando se produce la singularidad, dificulta la capacidad de calcular la intensidad en números asociados con las velocidades que se presentan.
Ser capaz de medir las velocidades de un brazo robótico es fundamental para garantizar la seguridad. Cuando se enfrenta a un problema de singularidad, descubre que representa un gran riesgo para la robótica, aunque todavía no lo estén. Da lugar a altas velocidades de las articulaciones que pueden ser peligrosas, especialmente si trabaja con robots industriales grandes y rápidos. Por eso es tan importante trazar un mapa de las velocidades con las que está trabajando. Fuente:Youtube
Cuando se trata de la singularidad del robot, no solo afecta la cinemática de velocidad inversa, sino que también se filtra a las ecuaciones cinemáticas de posición inversa. Cuando trabaje con robots industriales, encontrará que cuentan con ecuaciones y soluciones para diferentes posiciones de las articulaciones. Las diferentes soluciones presentadas están estrechamente vinculadas a los diferentes tipos de configuración.
Por ejemplo, si su robot presenta 8 soluciones únicas para las posiciones de las articulaciones hasta la posición del efector final, también contará con 8 tipos de configuración diferentes. Para cambiar un tipo de configuración tendría que pasar por una singularidad. Las singularidades son los límites que se encuentran entre las entidades 6D que aparecen en el espacio de trabajo cartesiano en un robot típico de 6 ejes. Esto limita las diferentes configuraciones que puede lograr y los límites del espacio de trabajo disponibles para su robot industrial. Fuente:blog. grabcad.com
Dado el hecho de que las singularidades de los robots pueden ocurrir en cualquier brazo robótico industrial con el que esté trabajando, es importante darse cuenta de que existen diferentes tipos. Al igual que el brazo robótico viene en diferentes partes, las singularidades también afectarán a estas diferentes partes dando como resultado una variedad de problemas.
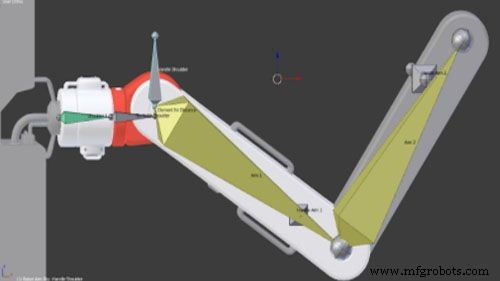
Aquí, es importante tener en cuenta los diferentes ejes de articulaciones que se presentan en los brazos robóticos industriales. Trabajará con 2 y 3 que son paralelos, 1 y 4 que son normales a 2 y 3, el eje de la articulación 5 que es normal a las articulaciones de los ejes de 4 y 6. Ahora que comprende mejor el diferentes ejes y articulaciones, se encuentra en un mejor lugar para explorar los tipos de singularidad. Los tipos más evidentes de singularidades en un brazo robótico articulado verticalmente a considerar incluyen: Fuente:sitios. google.com
Cuando se trata de brazos de robot articulados verticalmente con muñecas en línea, tienden a tener la singularidad de la muñeca como el problema más frecuente. Este tipo de singularidad ocurre cuando los ejes de las articulaciones 4 y 6 coinciden entre sí. Cuando esto sucede, la muñeca no puede mover el efector final en la dirección del eje de la articulación 5. En la aplicación, considere un brazo de robot industrial que funcione con precisión.
Para que siga una línea a través de la singularidad, las articulaciones 4 y 6 deben ser simultáneas y girar 90 grados. Esto se hará en direcciones opuestas para garantizar que el proceso sea preciso. Esto demuestra que es factible cruzar la singularidad de una muñeca. Sin embargo, una vez que se llega a la singularidad, el efector final permanece inmóvil mientras las dos articulaciones giran. Para que el efector final cruce la singularidad, debe detenerse primero. Si estuviera en aplicación, obstaculizaría la precisión del brazo industrial durante el trabajo. Hay toneladas de soluciones para la singularidad de la muñeca que se pueden implementar fácilmente para corregir el problema. Fuente:www. Electronicsteacher.com
El segundo tipo de singularidad que puede encontrar al trabajar con brazos de robot articulados verticalmente con muñecas en línea es la singularidad del codo. Ocurre principalmente cuando el centro de la muñeca se encuentra en el plano que pasa por los ejes de las articulaciones 2 y 3. El centro de la muñeca se utiliza para referirse al punto donde se cruzan los ejes de las articulaciones 4, 5 y 6. En la singularidad del codo, encontrará que el brazo está completamente estirado y también puede presentar algunos casos en los que no se puede doblar por completo. Este tipo de singularidad está determinada principalmente por el eje y la posición de la articulación 3. La singularidad del codo también presenta un par de soluciones que pueden ayudarlo a resolver cualquier problema de rendimiento que pueda estar experimentando con su brazo robótico. Este tipo de singularidad ocurre con bastante frecuencia y se puede predecir y evitar fácilmente. Fuente:blenderartists. org
La singularidad final que puede encontrar es la singularidad del hombro que se produce cuando el centro de la muñeca del robot se encuentra en la línea que pasa por los ejes de las articulaciones 1 y 2. Esta singularidad es la más compleja entre las demás dado que no depende de una sola posición articular. Con la singularidad del hombro, la limitación se coloca en el movimiento en la dirección del eje de la articulación 2.
En la aplicación, para que el robot siga una línea a través de la singularidad del hombro, las articulaciones 1 y 4 deben girar simultáneamente en un ángulo de 90 grados. Esta rotación como en la singularidad de la muñeca se realiza en direcciones opuestas mientras que el efector final permanece constante. Al igual que en la singularidad de la muñeca, el movimiento a través de la singularidad del hombro es posible, sin embargo, el efector final tendrá que detenerse para hacerlo posible. Esta singularidad también presenta algunas soluciones que se pueden implementar para garantizar que el brazo robótico vuelva a funcionar de la mejor manera. Fuente:www. istockphoto.com
Cuando se trata de robots colaborativos, encontrará los ejes de las articulaciones 2, 3 y 4 que son paralelos, el eje de la articulación 1 se cruza y es normal a los ejes de la articulación 2. Además, también presenta el eje de la articulación 5 que se cruza y es normal a los ejes de las articulaciones 4 y 6. Al igual que las singularidades en los robots articulados, estos robots también presentan diferentes soluciones en relación con los diferentes tipos de configuración. Los tipos de singularidades incluidas en Cobots incluyen:
La singularidad de la muñeca en estos robots ocurre cuando los ejes de las articulaciones 4 y 6 se vuelven paralelos. En esta situación, puede encontrar que los ejes de las articulaciones 2, 3, 4 y 5 pueden moverse mientras el efector final permanece constante.
En estos robots, la singularidad del codo ocurre cuando los ejes de las articulaciones 2, 3 y 4 están en el mismo plano. Esto limita en gran medida el movimiento del efector final y, a su vez, afecta el rendimiento del brazo robótico.
La singularidad del hombro ocurre cuando el punto de intersección de los ejes de las articulaciones 5 y 6 se encuentra en el plano que pasa por los ejes de las articulaciones 1 y 2. Aquí hay algunas soluciones que se pueden implementar para remediar la singularidad y tener un robot industrial en funcionamiento. Fuente:www. ennomotive.com
Con los diferentes efectos que tiene la singularidad del robot en los procesos de fabricación, tener formas de evitarlos es fundamental. Dado que los diferentes tipos de robots, las singularidades varían según el tipo de robot con el que esté trabajando, tener un conocimiento básico de cómo evitarlos garantizará que sus procesos se ejecuten con facilidad. Generalmente, las singularidades solo se pueden evitar asegurándose de que sus celdas robóticas estén diseñadas correctamente. Esto también se refleja en el diseño que aparece en la placa adaptadora que elige usar para su efector final.
Por ejemplo, si configura su brazo robótico y asigna mal una ubicación de selección para que se corresponda con una singularidad de muñeca, entonces no hay mucho que pueda hacer para resolver el problema. Con esto, lo único que hay que hacer es comprobar si la pose se puede utilizar en una aplicación no singular. Además, las singularidades también se pueden evitar agregando pequeños ángulos a las herramientas. Esto es de gran ayuda para ayudar a reducir las posibilidades de que el robot se mueva hacia una singularidad. Esta es una técnica que es utilizada principalmente por técnicos que entienden la mecánica y pueden ajustar las soluciones a su favor.
Por último, las singularidades también se pueden evitar adoptando el enfoque de programación y hacer que las matemáticas le ayuden a ocuparse de las cosas. En esto, encontrará que el número de ejes se reduce en gran medida para que sea posible evitar la singularidad. Esto principalmente porque un mayor número de ejes aumenta las posibilidades de que ocurran singularidades. Recuerde, las singularidades ocurren cuando los ejes se alinean entre sí bloqueando el movimiento de los brazos robóticos en ciertas direcciones. Reducir el número de ejes también disminuye las posibilidades de que se alineen y provoquen bloqueos.
La singularidad del robot es un gran problema que se experimenta en diferentes aplicaciones industriales de brazos robóticos y otros equipos de automatización. Lidiar con estos problemas por su cuenta puede resultar un lastre, por lo que debe intentar evitar la singularidad del robot. Sin embargo, si encuentra este problema, puede encontrar una solución o contratar a un técnico experto que se encargará del problema.
Alternativamente, establezca una relación de trabajo cercana con un fabricante de equipos de automatización de renombre que lo ayudará cuando encuentre alguna singularidad. Tómese su tiempo para asegurarse de que su equipo robótico funcione bien para ayudarlo a personalizar completamente y capitalizar su uso para su negocio. 
Tabla de contenido
Qué es Robot Singularity

¿Qué afecta la singularidad del robot?
Funciones de la singularidad del robot

El declive en el mapeo de velocidad
Límites internos limitados del espacio de trabajo
Tipos de singularidad de robot en un robot articulado verticalmente

Singularidad de muñeca
Singularidad del codo

Singularidad del hombro
Tipos de singularidad en un robot colaborativo de seis ejes (Cobot)

Singularidad de muñeca
Singularidad del codo
Singularidad del hombro
Cómo evitar la singularidad en robótica

Conclusión
Robot industrial
- Sobre de trabajo de robot:¿Qué es?
- Diferentes grados de libertad en brazos robóticos:una explicación completa
- Brazos robóticos en la fabricación y sus beneficios
- ¿Cuáles son los beneficios de los brazos robóticos para los seres humanos?
- ¿Qué es una muñeca robótica? Una guía definitiva
- ¿Qué es la soldadura robótica? - Proceso y aplicación
- ¿Qué son los cobots?
- Robótica guiada por visión
- ¿Qué es la soldadura robótica? - Proceso y aplicación
- ¿Qué es un robot de bebidas?
- ¿Realmente vale la pena la molienda robótica?