


Automatización de sus procesos mediante la selección de contenedores:esto es lo que debe buscar
Por qué lea esto: La selección de contenedores ha sido uno de los procesos de automatización más desafiantes durante años. Si bien la tecnología puede optimizar su producción de varias maneras, algunas tareas aún pueden ser demasiado complejas para manejarlas. Este artículo muestra los procesos que podrían automatizarse mediante la selección de contenedores, los desafíos potenciales y sus soluciones.
¿Qué es la recolección de contenedores?
El objetivo de la recolección de contenedores es recoger objetos similares que se colocan y orientan aleatoriamente de un contenedor, utilizando un sistema de visión, un robot y una pinza. El sistema de visión típicamente realiza un escaneo 3D del objeto dando su nube de puntos (conjunto de puntos en el espacio que constituyen un objeto) y así reconociéndolo.
Luego, el robot es conducido al contenedor, recoge el objeto, sale del contenedor y se dirige al objetivo de colocación, generalmente una caja o algún otro accesorio.
Desafíos y soluciones para la parte robótica del proceso de recolección de contenedores
Algunos elementos serán difíciles de alcanzar
Un problema importante con la recolección de contenedores es la incapacidad del robot para recoger todas las piezas del contenedor. Recoger del 80 al 85 por ciento de ellos es manejable, ya que el sistema de visión ordenará al robot que recoja los objetos que son fáciles de agarrar (por ejemplo, los que están encima).
La parte difícil es lograr agarrar los últimos elementos que están entrelazados o se sientan en una esquina del contenedor. Esto se puede solucionar de dos formas. El primero implica rediseñar el contenedor, dándole una forma más práctica. Por ejemplo, una forma cónica mantendría todas las partes en el medio en todo momento.
Una segunda solución sería agitar el contenedor (por ejemplo, automáticamente usando un motor) para que las posiciones y orientaciones de las piezas se reorganicen y no se mezclen más. La cámara los identificaría más fácilmente.
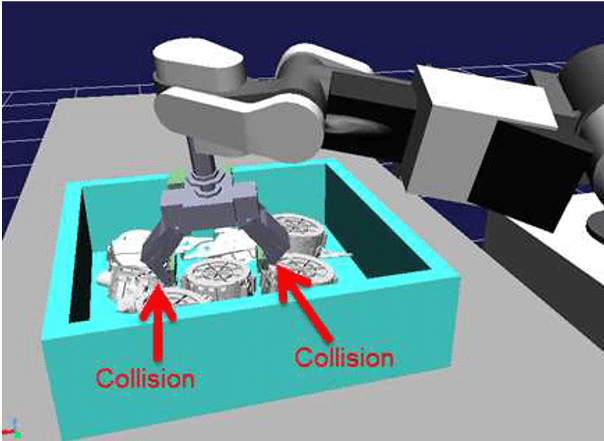
Las pinzas pueden dañar los artículos recolectados
Otro problema es la posibilidad de colisión de la pinza con el resto de objetos al intentar coger uno. La estrategia de selección debe ser precisa para evitar dañar las partes restantes (especialmente las frágiles).
Una solución a eso es un algoritmo de planificación de ruta preciso con evitación de obstáculos. La planificación de rutas en robótica es el proceso de encontrar la ruta continua óptima desde el punto A hasta el punto B. Si también se incluye la evitación de obstáculos, la misma tarea se realiza sin chocar con ningún obstáculo.
Puede haber casos en los que los objetos del contenedor sean de diferente forma o naturaleza (por ejemplo, manzanas y naranjas). En este caso, se podría utilizar una pinza blanda o una pinza de vacío con ventosas para que se adapte a cualquier tamaño y forma.

Desafíos y soluciones para la parte de visión del proceso de recolección de contenedores
El sistema de visión de una solución de recolección de contenedores puede incluir cámaras 2D o 3D. No hace falta decir que las cámaras 3D (cámaras duales que crean una imagen 3D) son más caras, pero son más efectivas. Además, se pueden utilizar escáneres láser 3D que producen las nubes de puntos antes mencionadas.
La detección de rayos, oclusión y bordes pueden complicar el proceso
Los problemas recurrentes en la visión incluyen iluminación, oclusión y detección de bordes. Se aplican a los sistemas de visión 2D y 3D.
Iluminación significa que las sombras se proyectan de cada objeto al resto, por lo que la cámara tiene dificultades para detectarlas. Se puede resolver proporcionando a la escena iluminación adicional que podría colocarse junto a la cámara o en la muñeca del robot.
Oclusión tiene lugar cuando el objeto no es completamente visible para la cámara, ya que se coloca otro objeto encima. Nuevamente, agitar la papelera puede ser útil en este caso, para que el objeto pueda detectarse más fácilmente. Ser detectado más fácilmente.
Detección de bordes es el desafío de averiguar el perímetro del contorno (bordes) de un objeto. Se vuelve aún más difícil cuando una gran cantidad de objetos se colocan uno al lado del otro, como en la recolección de contenedores. La solución a este problema depende del software y los métodos utilizados.
Cómo detectar el potencial para automatizar sus procesos mediante la selección de contenedores
Si considera automatizar los procesos de su empresa mediante la selección de contenedores, los siguientes puntos podrían sugerir cierto potencial de automatización:
- Gran cantidad de piezas pequeñas: Si el sistema está configurado correctamente, el robot puede recoger esas piezas (como tornillos o arandelas) de forma rápida y robusta.
- Elementos desordenados: Procesos en los que no es posible recibir artículos de forma ordenada de un proceso anterior o subproveedor. En la mayoría de los casos, será más efectivo solicitar que los artículos se entreguen de manera estructurada y, por lo tanto, evitar completamente la recolección de contenedores.
- Partes que tienen una superficie mate. Si las piezas son muy reflectantes, como las piezas de metal mecanizadas, puede haber problemas con los rayos. La mayoría de los sistemas de cámaras tendrán dificultades para encontrar los artículos para la recolección de contenedores.
- Un proceso en el que la duración del ciclo es superior a aproximadamente 10 segundos , y preferiblemente con un tampón para piezas recogidas. Un sistema de recolección de contenedores tardará algún tiempo en encontrar y recoger cada artículo.
Conclusión
Para los desarrolladores, la recolección de contenedores es verdaderamente el santo grial. Para los clientes puede que no sea así. Por lo general, puede ser una buena idea intentar evitar el uso de soluciones de recolección de contenedores, simplemente asegurándose de que el formato de entrega de los artículos sea ordenado, en lugar de aleatorio en un contenedor.
Por lo general, esto agregará un poco de costo, pero a menudo es más barato y permite un procesamiento más rápido que usar la selección de contenedores.
Sin embargo, en algunos casos esto no es posible o es muy caro. En esos casos, es fantástico poder utilizar la función de selección de contenedores.
Si un proceso suyo cumple los cuatro puntos anteriores, podría ser muy adecuado para la recolección de contenedores. Cuando encuentre la solución a utilizar, tenga en cuenta que algunas soluciones aún son muy experimentales, mientras que otras han tenido varios años para madurar y demostrar su solidez.
Robot industrial
- Qué debe buscar en una celda de trabajo robótica prediseñada
- Rediseño de su equipo para mejorar la productividad
- Qué buscar en un socio de fabricación de uretano
- ¿Qué es lo adecuado para su carga? Motor de CA frente a motor de CC
- Qué buscar en una empresa de reparación de equipos de construcción
- Qué buscar en un fabricante de PCB:Parte 2
- Qué buscar en una plegadora usada
- Qué buscar al comprar un herrero
- Qué buscar en un socio de equipos de fabricación
- Qué buscar en un corredor de maquinaria
- Qué buscar en un proveedor de metal