


Comprender la elección de la longitud de onda en los sistemas LiDAR
Hay diferentes tipos de LiDAR. Los involucrados en la industria automotriz deben ser conscientes de las fortalezas y debilidades relativas de cada uno.
Es ampliamente reconocido que los sistemas avanzados de asistencia al conductor (ADAS) y la conducción autónoma (AD) pueden tener éxito con la detección efectiva del entorno que rodea al vehículo que se alimenta de los algoritmos que permiten la navegación autónoma. Dada la absoluta confianza en la detección en situaciones críticas para la vida, se utilizan múltiples modalidades de sensores y los datos se fusionan para aumentar entre sí y proporcionar redundancia. Esto permite que cada tecnología aproveche sus puntos fuertes y ofrezca una solución mejor combinada.
Las tres modalidades que serán destacadas para el sensor utilizado en vehículos para ADAS y AD en el futuro son sensores de imagen, radar y LiDAR (detección de luz y rango). Cada uno de estos sensores tiene sus propias fortalezas y juntos pueden comprender un conjunto completo de sensores que brindan datos para permitir que los algoritmos de percepción autónomos tomen decisiones con la fusión de sensores:la capacidad de proporcionar color, intensidad, velocidad y profundidad para cada punto o núcleo en la escena.
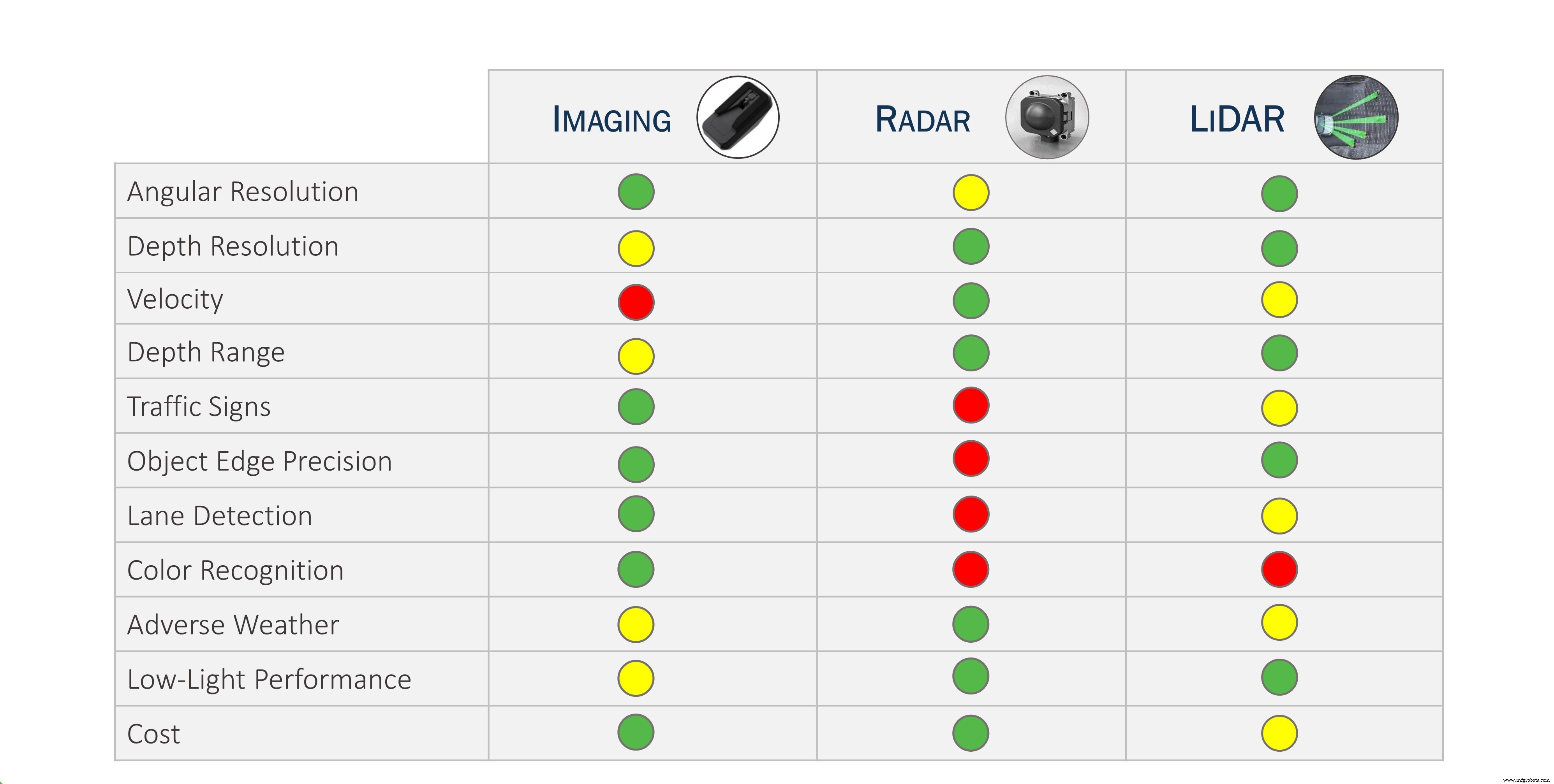
Figura 1:La fusión de sensores aprovecha los puntos fuertes de cada modalidad para proporcionar información completa sobre los alrededores del vehículo.
De estas tres modalidades principales, LiDAR es la tecnología más incipiente que se comercializa para uso en el mercado masivo, aunque el concepto de usar la luz para medir la distancia se remonta a décadas. Se espera que el mercado de LiDAR automotriz muestre un crecimiento espectacular de $ 39 millones en 2020 a $ 1,75 mil millones proyectados en 2025, según Yole Développement, impulsado por la proliferación de sistemas autónomos que requieren el conjunto completo de sensores. La oportunidad es tan grande que hay más de 100 empresas que trabajan en la tecnología LiDAR, con inversiones acumuladas en estas empresas que superan los 1.500 millones de dólares para 2020, y esto fue antes de la avalancha de ofertas públicas iniciales impulsadas por SPAC por parte de más de un puñado de Compañías LiDAR que comenzaron a fines de 2020. Pero cuando hay tantas compañías trabajando en una sola tecnología, algunas de las cuales son fundamentalmente diferentes, como la longitud de onda de la luz que se usa (ejemplos destacados son 905 nm y 1550 nm), es inevitable que haya ser una tecnología ganadora y una consolidación, como se ha visto una y otra vez, ya sea Ethernet para redes o VHS para video.
Cuando uno mira a los usuarios de la tecnología LiDAR, los fabricantes de vehículos automotrices, junto con las empresas que diseñan y construyen vehículos robóticos autónomos para el transporte de personas y mercancías, lo más importante en sus mentes son sus requisitos. En última instancia, estas empresas quieren que los proveedores les proporcionen sensores LiDAR de bajo costo con un alto grado de confiabilidad y que cumplan con las especificaciones de rendimiento de alcance y detección de objetos de baja reflectividad. Aunque todos los ingenieros tienen puntos de vista sólidos, es probable que estas empresas sean independientes de la implementación de la tecnología si el proveedor puede cumplir con los requisitos de rendimiento y confiabilidad al costo adecuado. Y eso lleva al debate fundamental que este artículo pretende ayudar a resolver:¿Qué longitud de onda prevalecerá para las aplicaciones LiDAR automotrices?
Descripción general de LiDAR
Para comenzar a abordar esta cuestión, es necesario comprender la anatomía de un sistema LiDAR, del cual existen diferentes arquitecturas. LiDAR coherente, un tipo del cual se conoce como onda continua de frecuencia modulada (FMCW), mezcla una señal láser transmitida con luz reflejada para calcular el rango y la velocidad de los objetos. FMCW ofrece algunas ventajas, pero sigue siendo relativamente poco común en comparación con el enfoque LiDAR más común, LiDAR de tiempo de vuelo directo (dToF). Esta implementación mide la distancia a un objeto cronometrando el tiempo que tarda un pulso de luz muy corto enviado desde una fuente de iluminación en reflejarse en un objeto y volver a ser detectado por el sensor. Utiliza la velocidad de la luz para directamente calcule la distancia al objeto usando la fórmula matemática simple que relaciona el tiempo, la velocidad y la distancia. Un sistema dToF LiDAR típico tiene seis funciones de hardware principales, aunque la elección de la longitud de onda afecta principalmente a las funciones de transmisión y recepción.
haga clic para ver la imagen a tamaño completo
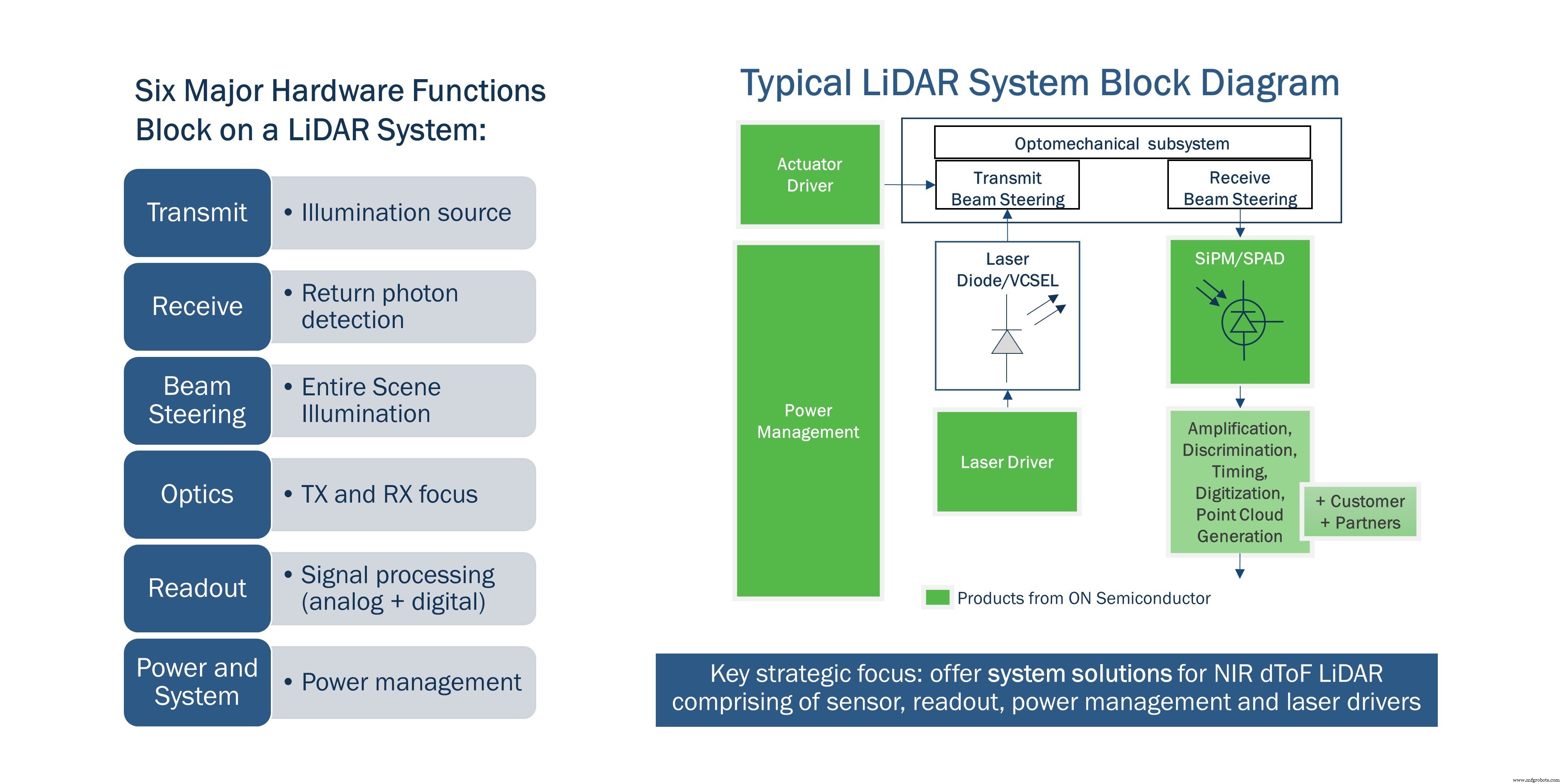
Figura 2:Diagrama de bloques de un sistema dToF típico con partes verdes que representan algunas áreas de enfoque de los productos ON Semiconductor.
La Tabla 1 muestra una lista de los diversos fabricantes de LiDAR que van desde conocidos Tier-1 automotrices hasta nuevas empresas en todas las regiones del mundo. Según los informes de mercado y la información pública, la gran mayoría de estas empresas operan sus LiDAR en longitudes de onda del infrarrojo cercano (NIR), a diferencia de las longitudes de onda del infrarrojo de onda corta (SWIR). Además, mientras que los proveedores enfocados en SWIR que trabajan en FMCW están restringidos a esas longitudes de onda, la mayoría de aquellos con una implementación de tiempo de vuelo directo tienen un camino para hacer un sistema con longitudes de onda NIR, si así lo eligen, mientras pueden aprovechar un gran parte de su IP existente en torno a funciones como la dirección del haz y el procesamiento de señales.
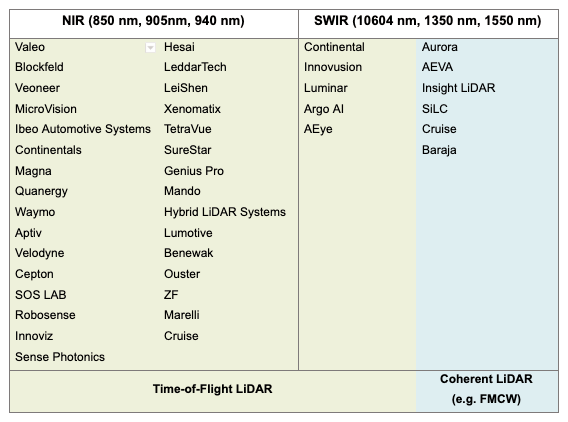
Tabla 1:Lista de fabricantes de LiDAR que operan en longitudes de onda NIR y SWIR. No es una lista completa. (Fuente de la imagen:Yole, IHS Markit y divulgaciones públicas)
Dado que la mayoría, pero no todos, de estos fabricantes han elegido longitudes de onda NIR, se debe considerar cómo tomaron esta decisión y cuáles son las implicaciones. En el centro de la discusión se encuentran algunas físicas básicas relacionadas con las propiedades de los materiales ligeros y semiconductores que componen los componentes utilizados en LiDAR.
Los fotones disparados por el láser en un sistema LiDAR, que están destinados a rebotar en los objetos y ser recibidos por el detector, tienen que competir con los fotones ambientales que provienen del sol. Al observar el espectro de la radiación solar y tener en cuenta la absorción atmosférica, existen "caídas" en la irradiancia en ciertas longitudes de onda que reducirían la cantidad de fotones existentes como ruido para el sistema. A 905 nm, hay aproximadamente 3 veces más cantidad de irradiancia solar que a 1550 nm, lo que significa que un sistema NIR tiene que lidiar con más ruido que puede interferir con el sensor. Pero este es solo uno de los factores a tener en cuenta al elegir una longitud de onda para un sistema LiDAR.
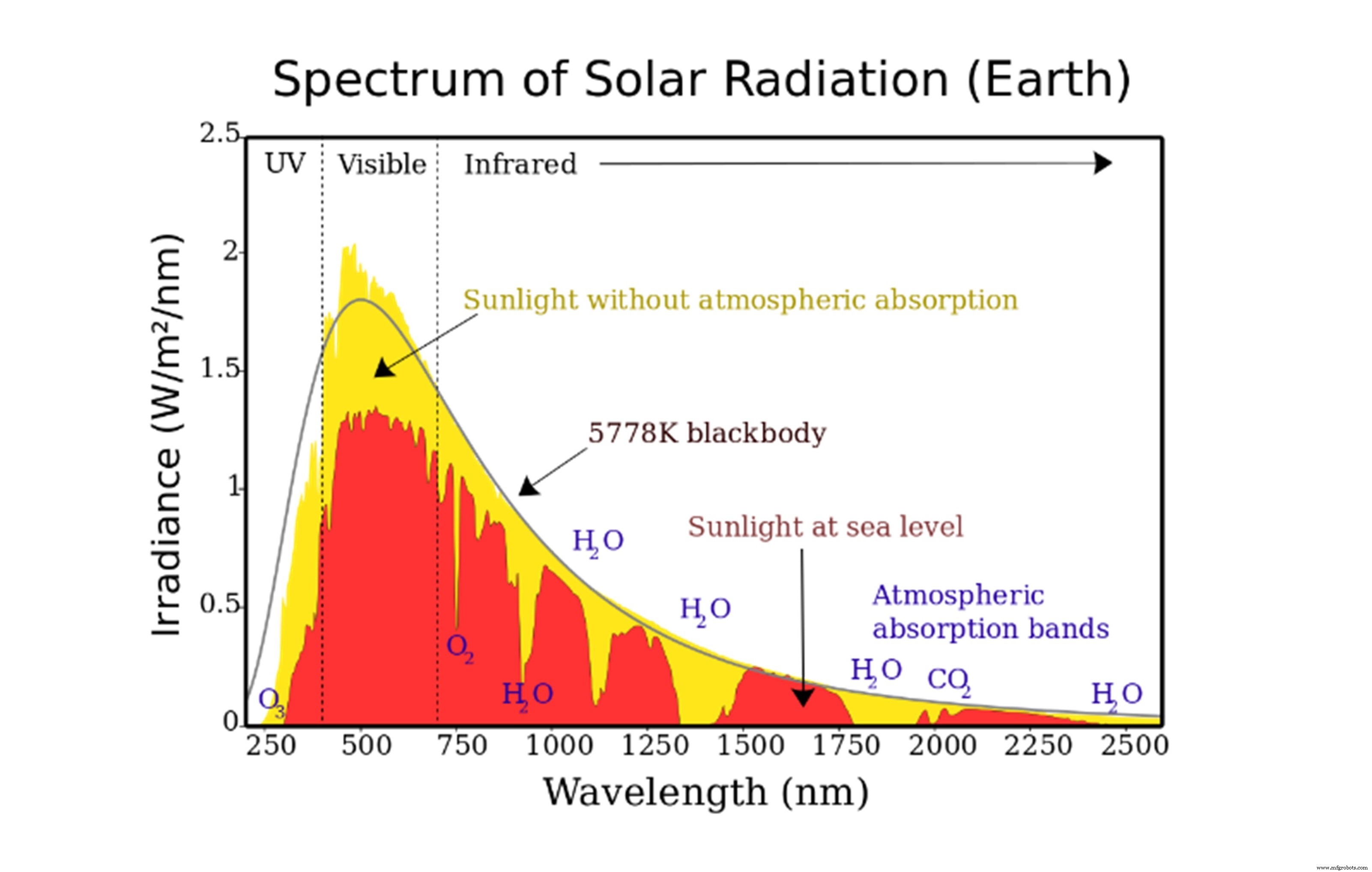
Figura 3:La absorción atmosférica de la luz da como resultado picos claros.
Sensores
Los componentes encargados de detectar los fotones en el sistema LiDAR son diferentes tipos de fotodetectores, por lo que es importante explicar por qué pueden estar formados por diferentes materiales semiconductores en función de la longitud de onda a detectar. En un semiconductor, una banda prohibida separa las bandas de valencia y conducción. Los fotones proporcionan la energía para ayudar a los electrones a superar esa banda prohibida y hacer que el semiconductor sea conductor, creando así una fotocorriente. La energía de cada fotón está relacionada con su longitud de onda, y la banda prohibida de un semiconductor está relacionada con su sensibilidad; esta es la razón por la que se necesitan diferentes materiales semiconductores dependiendo de la longitud de onda de la luz que se va a detectar. El silicio, que es el semiconductor más común y más barato de fabricar, responde a longitudes de onda visibles y NIR de hasta aproximadamente 1000 nm. Para detectar longitudes de onda más allá de eso en el rango SWIR, se puede realizar la aleación de semiconductores más exóticos del grupo III / V para hacer materiales como InGaAs capaces de detectar esas longitudes de onda de luz, de 1000 nm a 2500 nm.
Los primeros LiDAR usaban fotodiodos PIN como sensores. Los fotodiodos PIN no tienen ganancia inherente y, como resultado, no pueden detectar señales débiles fácilmente. Los fotodiodos de avalancha (APD) son el tipo de sensor más destacado que se utiliza en LiDAR en la actualidad y proporcionan una cantidad moderada de ganancia. Sin embargo, los APD también necesitan operar en modo lineal como los fotodiodos PIN para integrar la señal de las llegadas de fotones y también sufren de una uniformidad deficiente entre las partes, al tiempo que requieren voltajes de polarización muy altos. Los tipos más nuevos de sensores que se utilizan cada vez más en LiDAR se basan en diodos de avalancha de fotón único (SPAD), que tienen una ganancia muy grande y pueden producir una salida de corriente medible de cada fotón detectado. Los fotomultiplicadores de silicio (SiPM) son conjuntos de SPAD basados en silicio que tienen la ventaja adicional de poder distinguir fotones individuales de fotones múltiples al observar la amplitud de la señal generada.
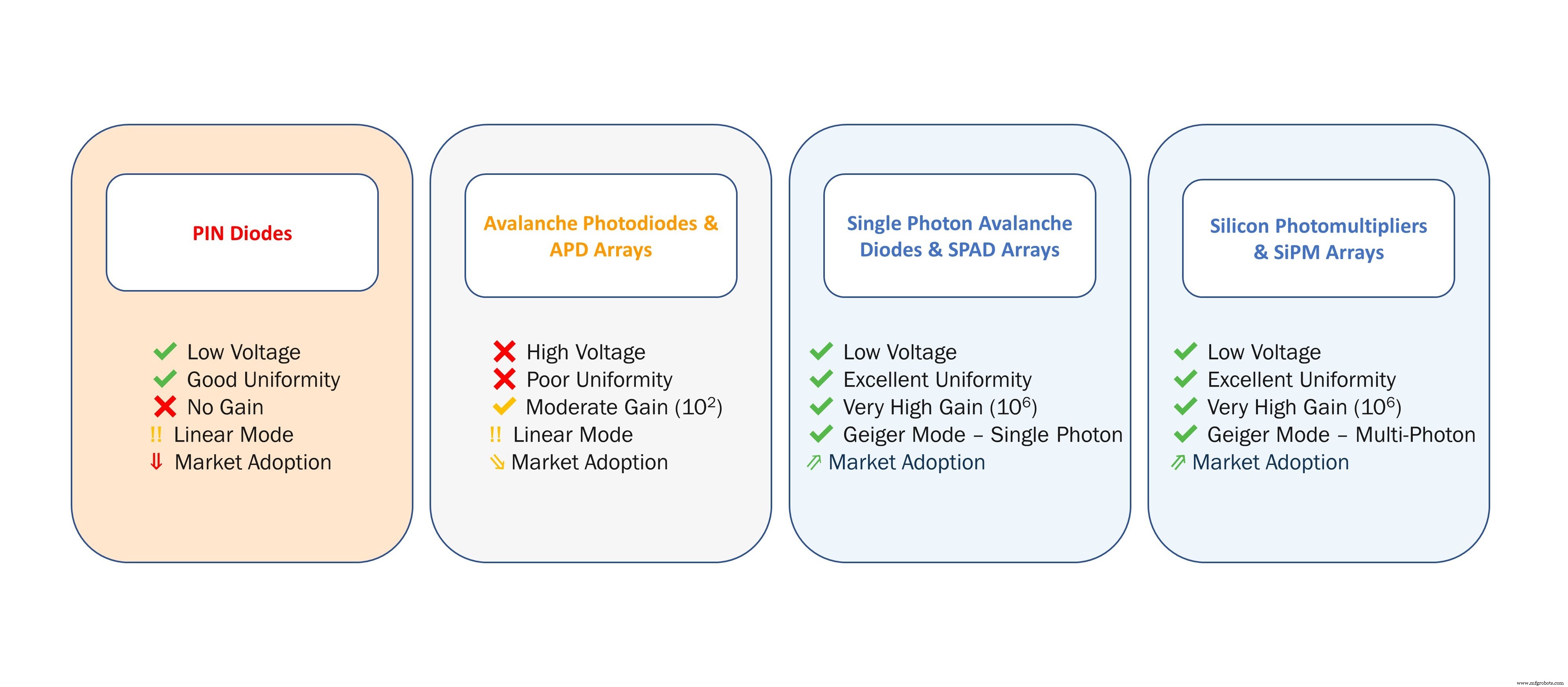
Figura 4:Diferentes tipos de fotodetectores utilizados para detectar señales en un LiDAR
Volviendo a la relevancia del tema de las longitudes de onda, todos estos tipos de fotodetectores pueden construirse sobre silicio (para detección NIR) o semiconductores III / V (para detección SWIR). Por otro lado, la capacidad de fabricación y el costo son clave para la viabilidad de la tecnología, y las fundiciones de silicio CMOS permiten la fabricación de este tipo de sensores a un alto volumen y bajo costo. Esta es la razón principal por la que los SiPM se adoptan cada vez más para LiDAR además de permitir un mayor rendimiento. Si bien existen APD y SPAD para SWIR, es difícil integrarlos con la lógica de lectura debido al hecho de que los procesos no están basados en silicio. Por último, los arreglos SPAD basados en III / V y los fotomultiplicadores (análogos a los SiPM) para SWIR aún no se han comercializado, por lo que la disponibilidad del ecosistema favorece las longitudes de onda NIR.
Láseres
La generación de fotones implica un proceso completamente diferente. Se puede utilizar una unión p-n semiconductora como medio de ganancia para hacer un láser; esto se hace bombeando una corriente a través de la unión que provoca la emisión resonante de fotones a medida que los átomos van a bandas de energía más bajas, lo que da como resultado una salida de rayo láser coherente. Los láseres semiconductores se basan en materiales de banda prohibida directa como GaAs e InP, que son eficientes para la generación de fotones que ocurre cuando los átomos pasan a una banda de energía más baja, a diferencia de los materiales de banda prohibida indirecta como el silicio.
Hay dos tipos principales de láseres utilizados en LiDAR:láser emisor de bordes (EEL) y láser emisor de superficie de cavidad vertical (VCSEL). Los EEL se utilizan más ampliamente en la actualidad, debido a su menor costo y mayor eficiencia de producción que los VCSEL. Son más difíciles de empaquetar y construir en matrices y también sufren un cambio de longitud de onda a través de la temperatura que hace que los detectores tengan que buscar una banda más amplia de longitudes de onda de fotones, lo que permite que también se detecten más fotones ambientales como ruido. A pesar del mayor costo y la menor eficiencia energética, la tecnología VCSEL más nueva tiene la ventaja de un empaquetado fácil y eficiente ya que el haz se genera desde la parte superior. La adopción de VCSEL en el mercado está aumentando a medida que sus costos continuarán disminuyendo significativamente y la eficiencia energética mejorará. Los EEL y VCSEL existen para la generación de longitudes de onda NIR y SWIR, con una diferencia clave:las longitudes de onda NIR se pueden generar con GaAs, mientras que las longitudes de onda SWIR requieren el uso de InGaAsP. Los láseres GaAs pueden utilizar fundiciones de tamaño de oblea más grandes, lo que genera un costo más bajo, lo que nuevamente apunta a una ventaja para el ecosistema de fabricantes de NIR LiDAR, tanto desde el punto de vista del costo como de la seguridad de la cadena de suministro.
haga clic para ver la imagen a tamaño completo
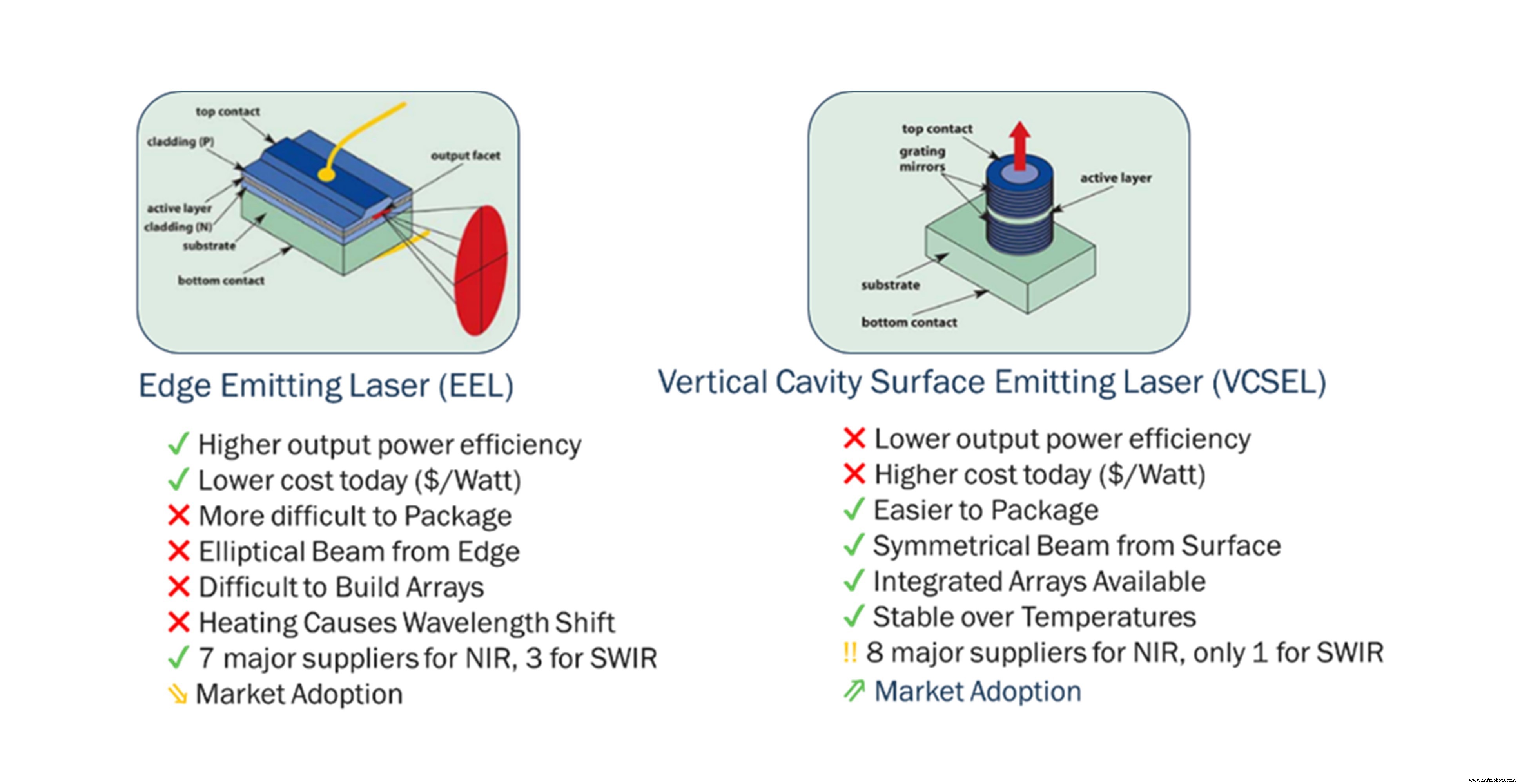
Figura 5:Diferentes tipos de láseres utilizados en un LiDAR.
Potencia del láser y seguridad ocular
Al hablar del debate sobre la longitud de onda, es imperativo considerar las implicaciones de seguridad ocular de un sistema LiDAR. El concepto de dToF LiDAR implica el uso de pulsos de láser cortos con un alto pico de potencia sobre un cierto ángulo de visión para ser emitidos a la escena. Un peatón que se interpone en el camino de emisión de un LiDAR necesita estar seguro de que sus ojos no se dañarán por un láser que se dispara en su dirección, y la IEC-60825 es una especificación que dicta la cantidad de exposición máxima permitida en los diferentes longitudes de onda de luz. Mientras que la luz NIR, similar a la luz visible, puede atravesar la córnea y alcanzar la retina en el ojo humano, la luz SWIR se absorbe principalmente dentro de la córnea y, como resultado, puede exponerse a niveles más altos.
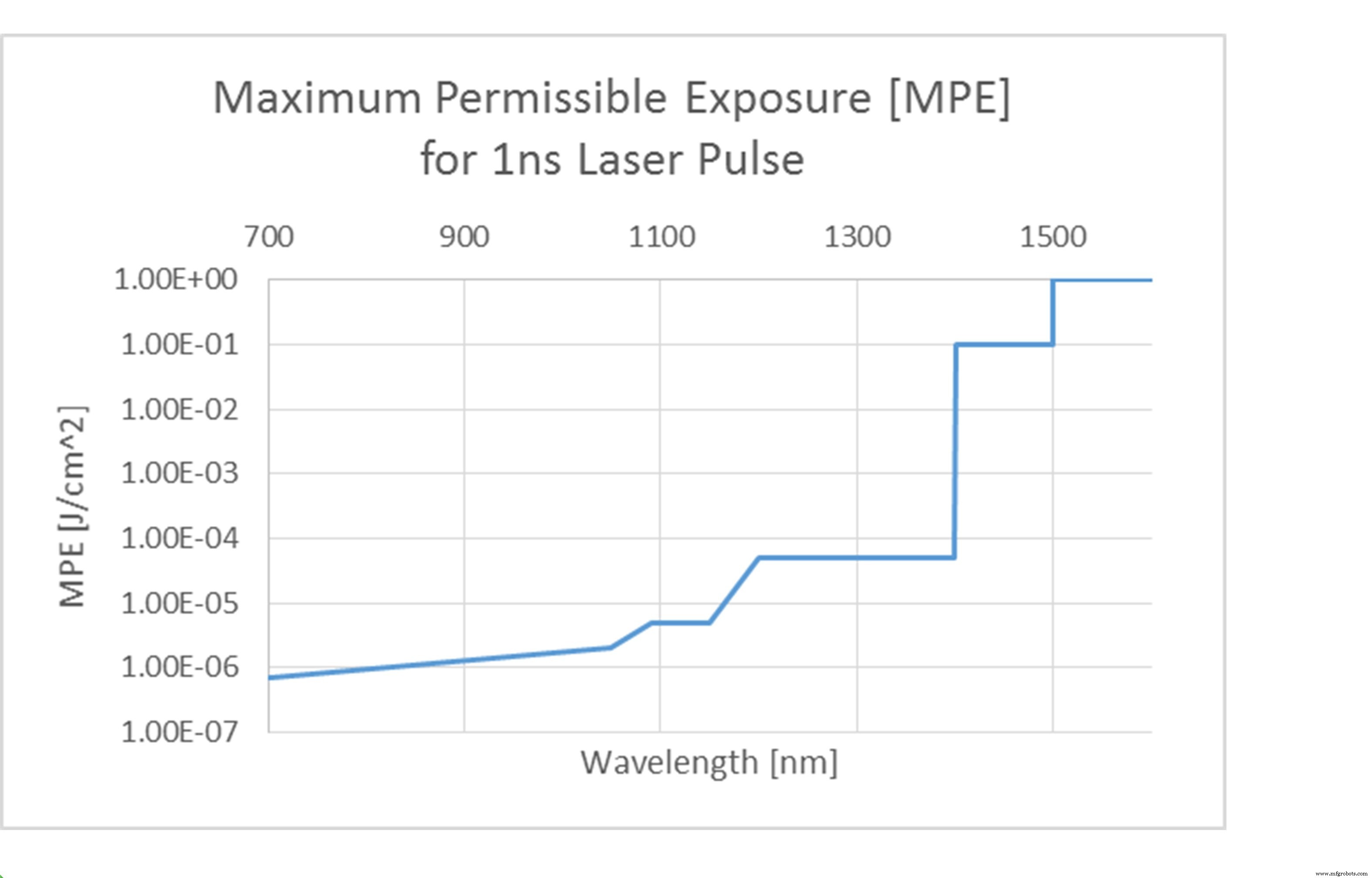
Figura 6:Especificación IEC-60825 para exposición láser segura para los ojos.
Ser capaz de generar múltiples órdenes de magnitud de potencia láser más alta es una ventaja para un sistema basado en 1550nm desde una perspectiva de rendimiento, ya que permite que se envíen más fotones y, por lo tanto, se devuelvan para ser detectados. Sin embargo, los poderes láser más altos también vienen con una compensación térmica. Cabe señalar que se debe realizar un diseño seguro para los ojos, independientemente de la longitud de onda, teniendo en cuenta claramente la energía por pulso y el tamaño de la apertura del láser. Con un LiDAR basado en 905 nm, la potencia máxima se puede aumentar mediante cualquiera de estos factores, como se muestra en la Figura 7.
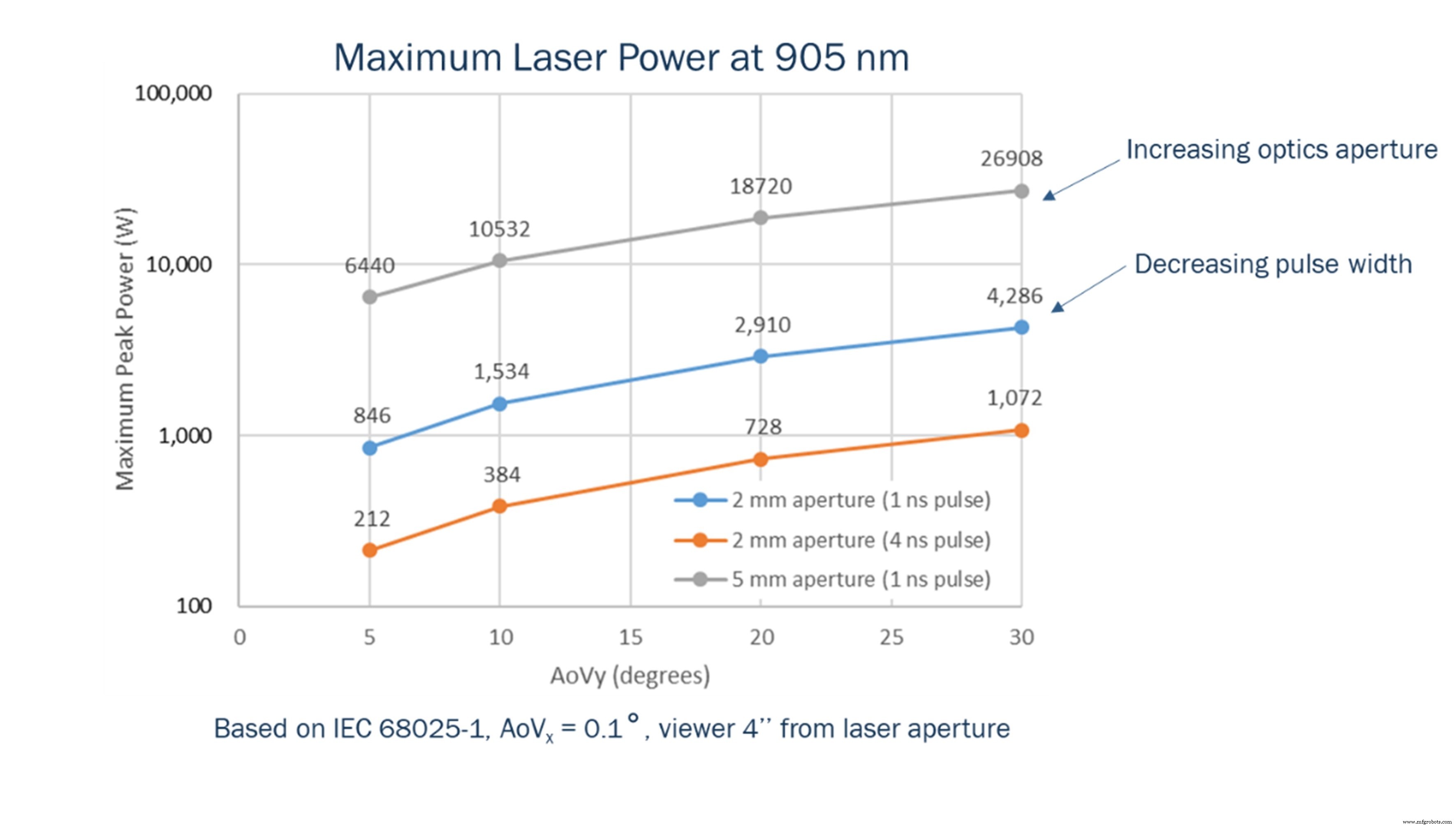
Figura 7:Diseño de láser seguro para los ojos para un LiDAR NIR con diferentes ópticas y parámetros de láser.
Comparación de los sistemas NIR y SWIR LiDAR
El enfoque anterior en la cantidad de potencia láser que se puede emitir nos devuelve a los sensores que se están utilizando. Un sensor de mayor rendimiento que sea capaz de detectar señales más débiles beneficiará claramente al sistema de múltiples formas:al poder lograr un rango más largo o al poder usar menos potencia láser para lograr el mismo rango. ON Semiconductor ha desarrollado una serie de SiPM para NIR LiDAR que impulsa la eficiencia de detección de fotones (PDE), un parámetro clave que indica la sensibilidad, a un 18% líder en el mercado con sus últimos sensores de la serie RDM.
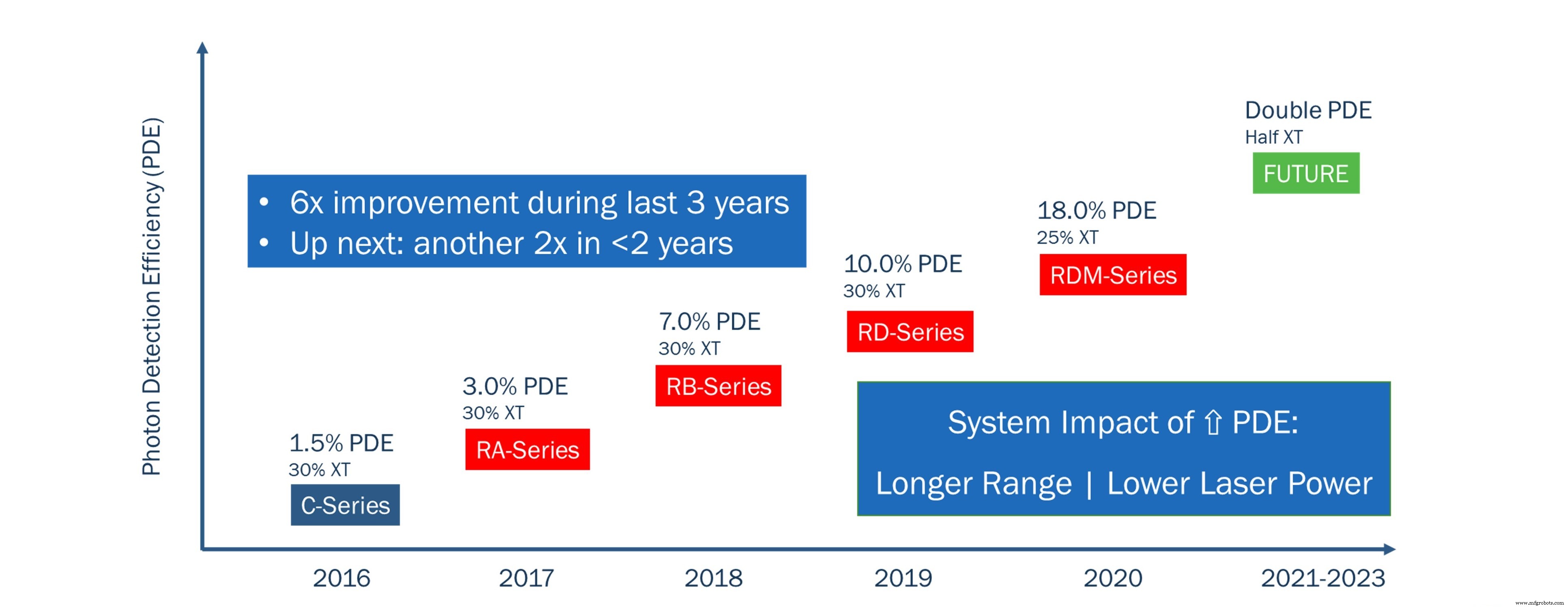
Figura 8:Hoja de ruta del proceso de los SiPM de ON Semiconductor.
Para comparar el rendimiento de un NIR dToF LiDAR con un SWIR dToF LiDAR, realizamos un modelado del sistema para arquitecturas LiDAR idénticas y condiciones ambientales con diferentes parámetros para los láseres y sensores. La arquitectura LiDAR es un sistema coaxial con una matriz de detectores de 16 canales y un mecanismo de escaneo para extenderse por el campo de visión, como se muestra en la Figura 10. Este modelo de sistema ha sido validado con hardware y nos permite estimar con precisión el rendimiento de LiDAR sistemas.
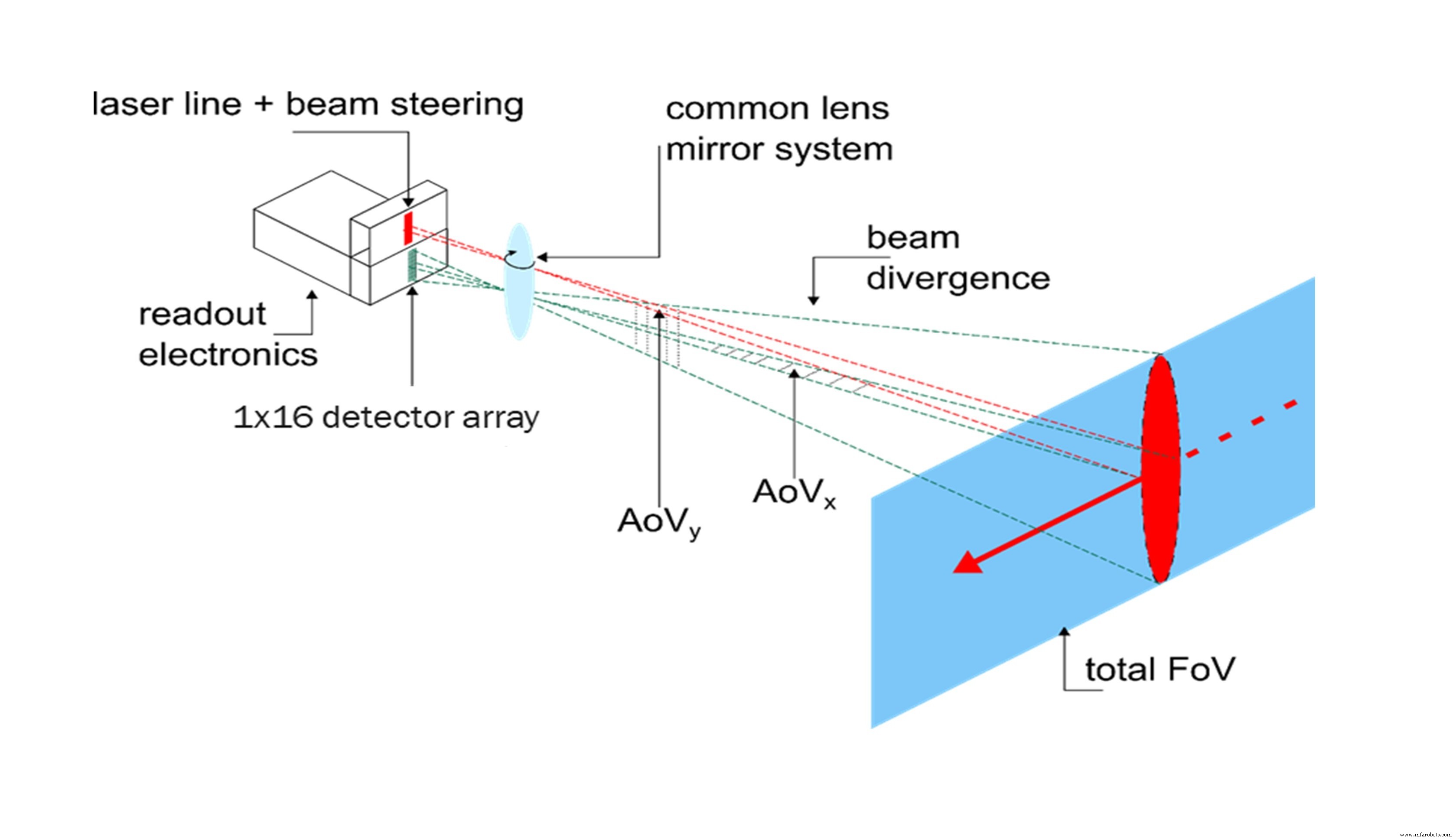
Figura 9:Modelo de sistema para un sensor dToF LiDAR.
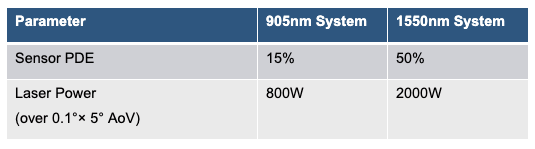
Tabla 2:Parámetros del láser y del sensor LiDAR para la simulación del modelo del sistema NIR y SWIR.
El sistema de 1550nm utiliza una mayor cantidad de potencia láser, así como un sensor de PDE más alto debido a su uso de aleaciones de InGaAs de alto PDE, que deberían producir un mejor rendimiento de rango en la simulación de nuestro sistema. Usando parámetros a nivel de sistema de luz ambiental de 100klux filtrada por un paso de banda de 50nm en la lente del sensor (centrado alrededor de 905nm y 1550nm respectivamente), un ángulo de visión de 0.1 ° x 5 ° escaneado sobre 80 ° horizontalmente a 30 fps, una tasa de repetición de láser de 500kHz con 1ns de ancho de pulso y un diámetro de lente de 22 mm, los resultados se muestran en la Figura 10.
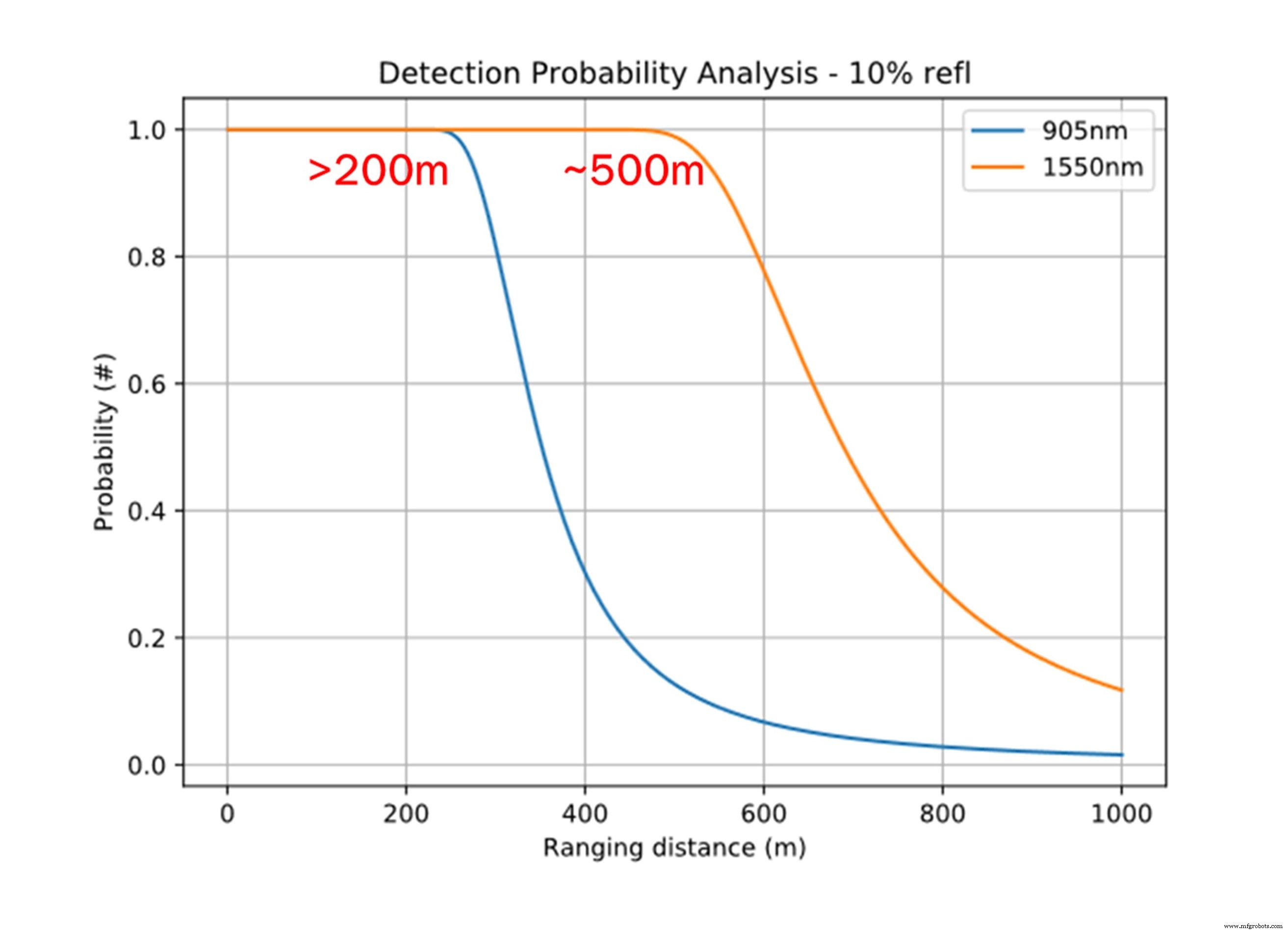
Figura 10:Resultados de simulación para sistemas LiDAR similares basados en 905 nm y 1550 nm.
Como era de esperar, el sistema de 1550 nm es capaz de alcanzar un mayor alcance para un objeto de baja reflectividad, llegando hasta 500 m con una probabilidad de alcance del 99%. Sin embargo, el sistema basado en 905 nm todavía alcanza más de 200 m de alcance, lo que demuestra que ambos tipos de sistemas pueden cumplir con los requisitos de LiDAR de largo alcance para automóviles en condiciones ambientales típicas. Cuando se introducen malas condiciones ambientales como lluvia o niebla, las propiedades de absorción de agua de la luz SWIR hacen que su rendimiento se degrade más rápidamente que un sistema basado en NIR, que es otro factor a tener en cuenta.
Consideraciones de costos
Habiendo analizado detenidamente la tecnología detrás de los sistemas LiDAR, así como las implicaciones de usar diferentes longitudes de onda, ahora volvemos al factor de consideraciones de costo. Anteriormente explicamos que los sensores que se utilizan para los LiDAR basados en NIR provienen de procesos de fundición de silicio CMOS nativos, que permiten el menor costo posible para los semiconductores. Además, también permiten la integración de la lógica de lectura CMOS con el sensor en un chip mediante el uso de la tecnología de matrices apiladas, que está disponible en las fundiciones de hoy, colapsando aún más la cadena de señales y reduciendo los costos. Por el contrario, los sensores SWIR utilizan fundiciones de semiconductores III / V como InGaAs, que son de mayor costo y la nueva tecnología híbrida Ge-Si, que puede permitir sensores SWIR de menor costo, lo que facilita la integración con la lógica de lectura, pero aún se estima que es más de 5 veces más costosa. que el silicio CMOS tradicional incluso después de alcanzar la madurez. En el lado del láser, la diferencia en el tamaño de las obleas entre las obleas de GaAs utilizadas para fabricar los chips láser en los sistemas NIR frente a las obleas de InGaAs utilizadas para fabricar los chips láser en los sistemas SWIR conduce nuevamente a una disparidad de costos, y el hecho de que los sistemas NIR han una ruta para usar VCSEL con una base de proveedores mucho más disponible también permite una integración de menor costo.
La suma total de los factores anteriores llevó a un análisis realizado por IHS Markit (Amsrud, 2019), que mostró que para el mismo tipo de componente (el sensor o láser), el costo de un sistema SWIR sería de 10 a 100 veces mayor. que un sistema NIR. El costo promedio de los componentes combinados para el sensor y el láser para un sistema NIR se estimó entre $ 4 y $ 20 por canal en 2019 y disminuirá de $ 2 a $ 10 para 2025. Por el contrario, el costo promedio equivalente de los componentes de un sistema SWIR se estimó en será de $ 275 por canal en 2019 y disminuirá a $ 155 por canal para 2025. Esa es una enorme diferencia de costo cuando se considera el hecho de que los sistemas LiDAR contienen múltiples canales, incluso si se usa un enfoque de escaneo 1D, ya que una matriz vertical de canales de un solo punto todavía es requerido.
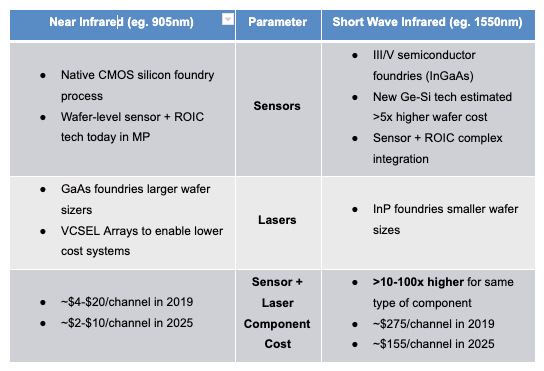
Tabla 3:Resumen de consideraciones de costos. (Fuente de la imagen:IHS Markit)
La dinámica del mercado LiDAR tampoco favorece al campo SWIR. El mercado de la conducción autónoma no ha crecido tan rápido como las expectativas del mercado hace cinco años, y los sistemas de autonomía de Nivel 4 y Nivel 5, para los cuales LiDAR es imprescindible, están a años de un despliegue masivo generalizado. Mientras tanto, los mercados industriales y de robótica que utilizan LiDAR son aún más conscientes de los costos y no necesitan las ventajas de rendimiento ultraalto de un sistema SWIR, por lo que estos fabricantes no tienen una forma mientras tanto de traer componentes. los costes se reducen aumentando el volumen, como se suele afirmar. Existe el problema del "huevo y la gallina" de obtener el costo más bajo cuando el volumen aumenta, pero se necesita el costo más bajo para obtener los volúmenes.
Resumen
Después de profundizar en la tecnología y las diferencias entre los sistemas NIR y SWIR, queda claro por qué la gran mayoría de los sistemas LiDAR que existen en la actualidad utilizan longitudes de onda NIR. Si bien las perspectivas para el futuro nunca son 100% seguras, es evidente que el costo y la disponibilidad de los proveedores del ecosistema son factores clave, y los sistemas basados en NIR ciertamente siempre serán más baratos debido a la ventaja tecnológica y las economías de escala para el silicio CMOS. Y aunque SWIR permite un sistema LiDAR de mayor alcance, los LiDAR basados en NIR también pueden lograr los requisitos automotrices de largo alcance deseados, al mismo tiempo que funcionan extremadamente bien para configuraciones de corto a mediano alcance que también se necesitan en ADAS y AD. La existencia de LiDAR basados en NIR en producción en masa para el mercado automotriz en la actualidad muestra que la tecnología se ha comercializado y probado, pero aún tomará algún tiempo para que se produzca la consolidación y para que los ganadores y los perdedores se diferencien. Después de todo, la industria del automóvil a principios del siglo XX contenía 30 fabricantes diferentes, y eso aumentó a casi 500 durante los siguientes diez años, pero solo pasaron unos pocos años después de eso para que la mayoría de ellos desaparecieran. Se espera que ocurra una dinámica similar con los fabricantes de LiDAR a finales de esta década.
Referencias
Yole Développement (2020). LiDAR para aplicaciones industriales y automotrices:Informe de mercado y tecnología 2020
Amsrud, P. (25 de septiembre de 2019). La carrera hacia un sistema LIDAR de bajo costo [Presentación de la conferencia] . Automotive LIDAR 2019, Detroit, MI, Estados Unidos. IHS Markit.
- Bahman Hadji, director de desarrollo comercial, división de detección automotriz, ON Semiconductor
>> Este artículo se publicó originalmente en nuestro sitio hermano, EE. Tiempos.
Contenidos relacionados:
- Los expertos de ADAS reflexionan sobre la integración de sensores en vehículos futuros
- Ciudades inteligentes:el caso de lidar en sistemas de transporte inteligentes
- ¿Qué está impulsando el cambio en los sistemas electrónicos automotrices?
- La tecnología de tiempo de vuelo promete una mayor precisión
- Por qué la tecnología de detección FIR es esencial para lograr vehículos totalmente autónomos
Para obtener más información sobre Embedded, suscríbase al boletín informativo semanal por correo electrónico de Embedded.
Sensor
- El sensor Hall apunta a sistemas automotrices críticos para la seguridad
- Diseño de sistemas agrícolas inteligentes de código abierto
- Comprensión de los sensores
- “Piel electrónica” bimodal
- Tiempo de vuelo frente a sistemas FMCW LiDAR
- Película de sensores para la industria aeroespacial
- Sensor de corazón-pulmón en miniatura en un chip
- Sensor de dióxido de carbono de estado sólido
- Sensor de calidad del aire a base de carbono
- Tecnología de sensor autónomo para retroalimentación en tiempo real sobre refrigeración y calefacción
- LiDAR 3D de Kodiak