


Sistema de seguridad ultrasónico
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 10 |
Acerca de este proyecto
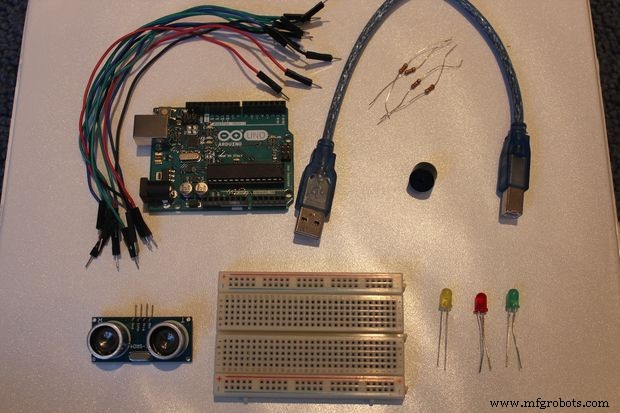
Paso 1:Reúna los materiales
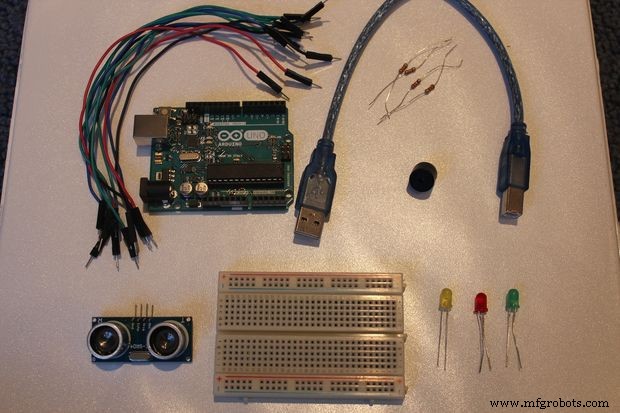
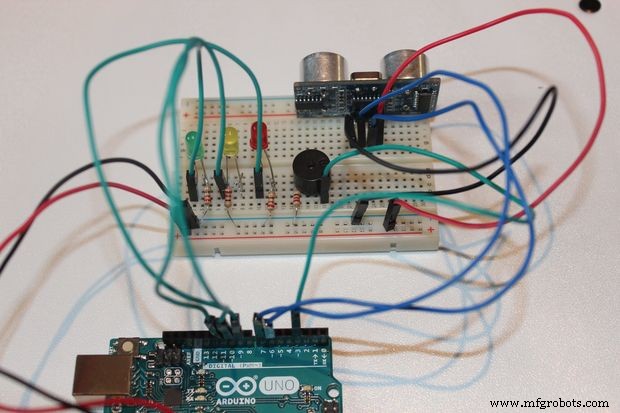
Paso 2:configuración
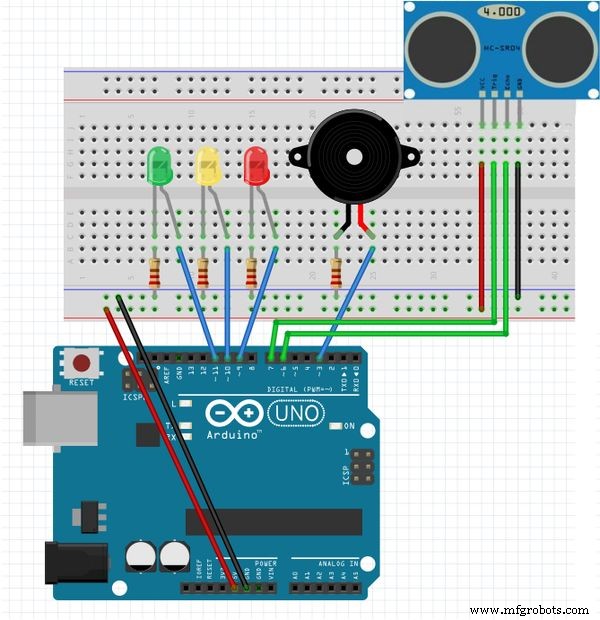
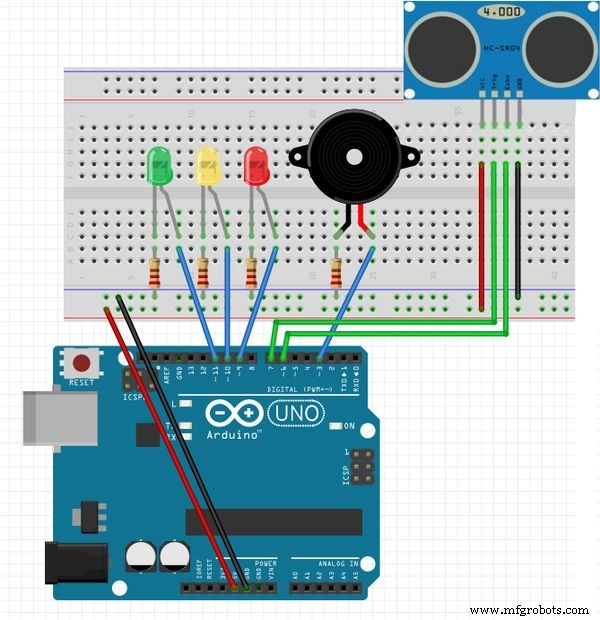
Conecte un cable rojo desde el pin de 5V en el Arduino al canal positivo de la placa de pruebas. Conecte un cable negro desde el pin GND en el Arduino al canal negativo de la placa:
- Buzzer =pin 7
En sensor ultrasónico:
- Eco =pin 3
- Trig =pin 2
LED:
- RedLED =pin 4
- YellowLED =pin 5
- GreenLED =pin 6
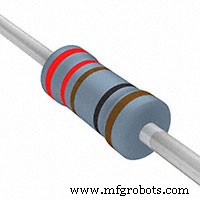
Los cables verdes conectados a los LED deben conectarse en línea con el lado positivo del LED, mientras que el lado negativo del LED debe conectarse al canal negativo de la placa de pruebas con una resistencia de 220 ohmios.
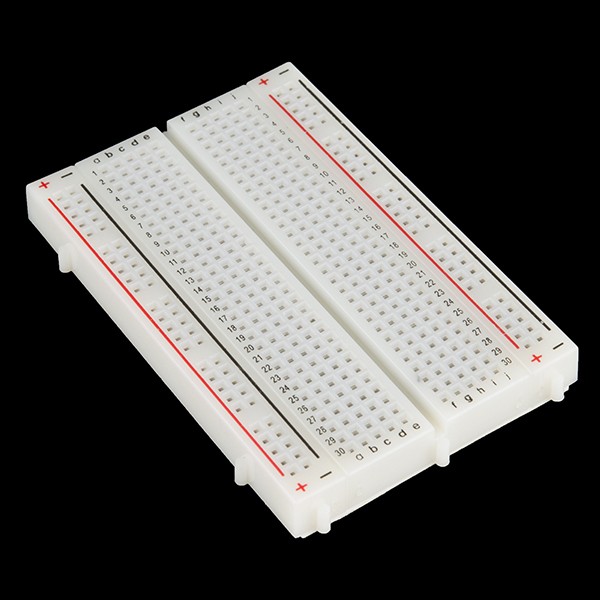
Paso 3:Montaje:placa de pruebas
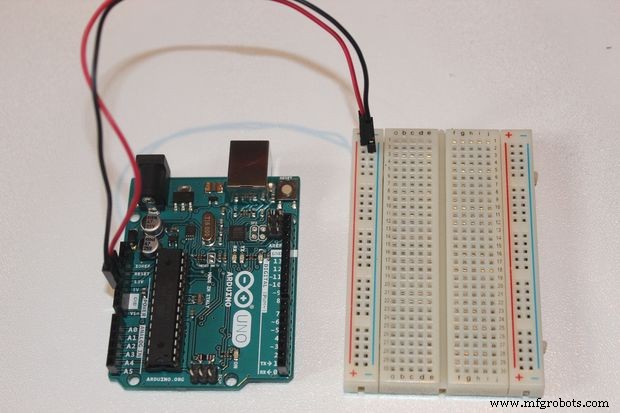
En primer lugar, conectemos el pin 5V y GND del Arduino a la placa de pruebas. Como mencioné antes, asegúrese de que el cable conectado al pin de 5V esté conectado al canal positivo de la placa de pruebas, y el cable conectado a la patilla GND esté conectado al canal negativo de la placa de pruebas.
Paso 4:Montaje:sensor ultrasónico
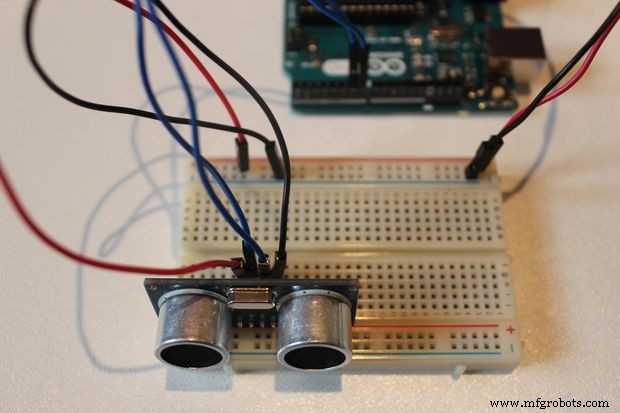
¡Es hora de conectar el sensor ultrasónico HC-SRO4! Un buen consejo es colocar el sensor ultrasónico lo más a la derecha posible de la placa de pruebas y asegurarse de que esté mirando hacia afuera. Volviendo a la imagen de configuración, debe conectar el pin GND en el sensor ultrasónico al canal negativo en la placa de pruebas. A continuación, conecte el pin Trig del sensor al pin 2 del Arduino y conecte el pin Echo del sensor al pin 3 del Arduino. Por último, conecte el pin VCC en el sensor ultrasónico al canal positivo en la placa de pruebas. Consulte la imagen de arriba si algo se vuelve confuso.
Paso 5:Montaje - LED
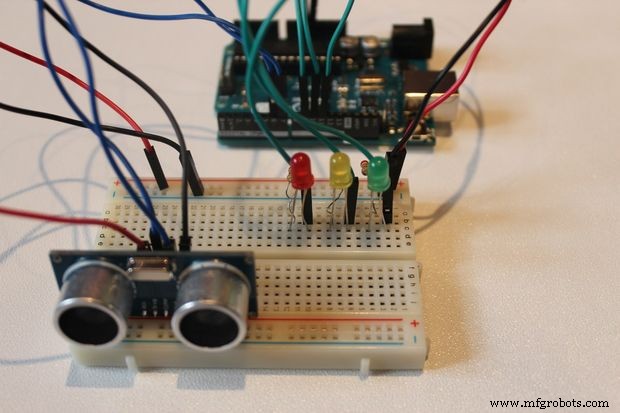
El siguiente paso es conectar los LED a la placa de pruebas y Arduino. Si es necesario, le recomiendo que vuelva a consultar la imagen de configuración (paso 2), conectar los LED es bastante fácil, hay mucha repetición. Primero conectemos el LED verde. Entonces, la forma de hacer esto es conectar el ánodo (la pata más larga) al pin 6 en el Arduino con un cable verde, y conectar el cátodo (la pata más corta) al canal negativo en la placa, usando 220 ohmios. resistor. Luego repita ese paso para el LED amarillo y luego el rojo, asegúrese de conectar el ánodo (la pata más larga) del LED amarillo al pin 5 en el Arduino y luego conecte el ánodo del LED rojo al pin 6. Una vez que haya hecho eso, su configuración debería verse similar a la imagen de arriba.
Las resistencias no son absolutamente necesarias, sin embargo, se recomienda su uso.
Paso 6:Montaje:zumbador
La última parte de la configuración para esto es conectar el zumbador a la placa de pruebas y al Arduino. Esta es una de las partes más fáciles de toda la configuración. Todo lo que se requiere hacer es conectar la pata más larga del zumbador al pin 7 del Arduino usando un cable verde y luego conectar la pata más corta del zumbador al canal negativo de la placa con una resistencia de 220 ohmios.
Se recomienda ALTAMENTE utilizar una resistencia para conectar la pata más corta del zumbador al canal negativo de la placa de pruebas. Esto reduce en gran medida el volumen del timbre y evita que muera rápidamente.
Código
- Sistema de seguridad ultrasónico
Sistema de seguridad ultrasónico Arduino
#define trigPin 2 # define echoPin 3 # define LEDlampRed 4 # define LEDlampYellow 5 # define LEDlampGreen 6 #define soundbuzzer 7int sound =500; void setup () {Serial.begin (9600); pinMode (trigPin, SALIDA); pinMode (echoPin, ENTRADA); pinMode (LEDlampRed, SALIDA); pinMode (LEDlampYellow, OUTPUT); pinMode (LEDlampGreen, SALIDA); pinMode (zumbador de sonido, SALIDA);} bucle vacío () {indicador de larga duración, distanciaincm; digitalWrite (trigPin, BAJO); delayMicroseconds (2); digitalWrite (trigPin, HIGH); delayMicroseconds (10); digitalWrite (trigPin, BAJO); durationindigit =pulseIn (echoPin, HIGH); distanciaincm =(duraciónindígito / 5) / 29.1; if (distanciaincm <50) {digitalWrite (LEDlampGreen, HIGH);} else {digitalWrite (LEDlampGreen, LOW); } if (distancia <20) {digitalWrite (LEDlampYellow, HIGH);} else {digitalWrite (LEDlampYellow, LOW); } if (distancia <5) {digitalWrite (LEDlampRed, HIGH); sonido =1000;} else {digitalWrite (LEDlampRed, LOW); } if (distanceincm> 5 || distanceinsm <=0) {Serial.println ("Fuera del rango permitido de distancias"); noTone (zumbador); } else {Serial.print (distancia); Serial.println ("cm"); tono (zumbador, sonido); } retraso (300);} Esquemas
Proceso de manufactura
- Cámara de seguridad Discord con ESP32
- Dados digitales Arduino
- Juego de ruleta DIY 37 LED
- ATtiny85 Mini Arcade:Serpiente
- Detector de alcance portátil
- Sistema de seguridad y automatización del hogar inteligente con 1Sheeld
- Sistema de riego de plantas domésticas
- Galvanoplastia con cobre
- NeoMatrix Arduino Pong
- Creador de secuencias de luz
- Enchufe inteligente