


Desinfectante de manos automático
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 19 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
 |
| |||
|
Aplicaciones y servicios en línea
 |
| |||
| ||||
|
Acerca de este proyecto
Durante los últimos meses, la pandemia de COVID-19 ha estado sembrando el caos en todo el mundo. Hay innumerables infecciones y, lamentablemente, muchas víctimas. Una de las medidas más importantes sugeridas por la Organización Mundial de la Salud es lavarse las manos constantemente con jabón o desinfectantes para manos. Pero uno de los problemas más importantes es la forma en que lo hacemos y es tocando físicamente el dosificador lo que elimina todo el propósito de la acción e incluso crea un gran riesgo de infección. Entonces yo , un niño de 14 años Decidí crear algo usando una placa Arduino Nano que pudiera combatir este problema, ¡pero también quería que fuera barato y que se pudiera conectar a muchos dispensadores diferentes de manera fácil, rápida y efectiva! Y esto es exactamente lo que hice, un accesorio que se puede colocar en la mayoría de los dispensadores de jabón / desinfectante para manos y convertirlos completamente manos libres y automático
En primer lugar, mire este video para ver el dispositivo en acción y también para comprender cómo funciona y cómo se fabricó.
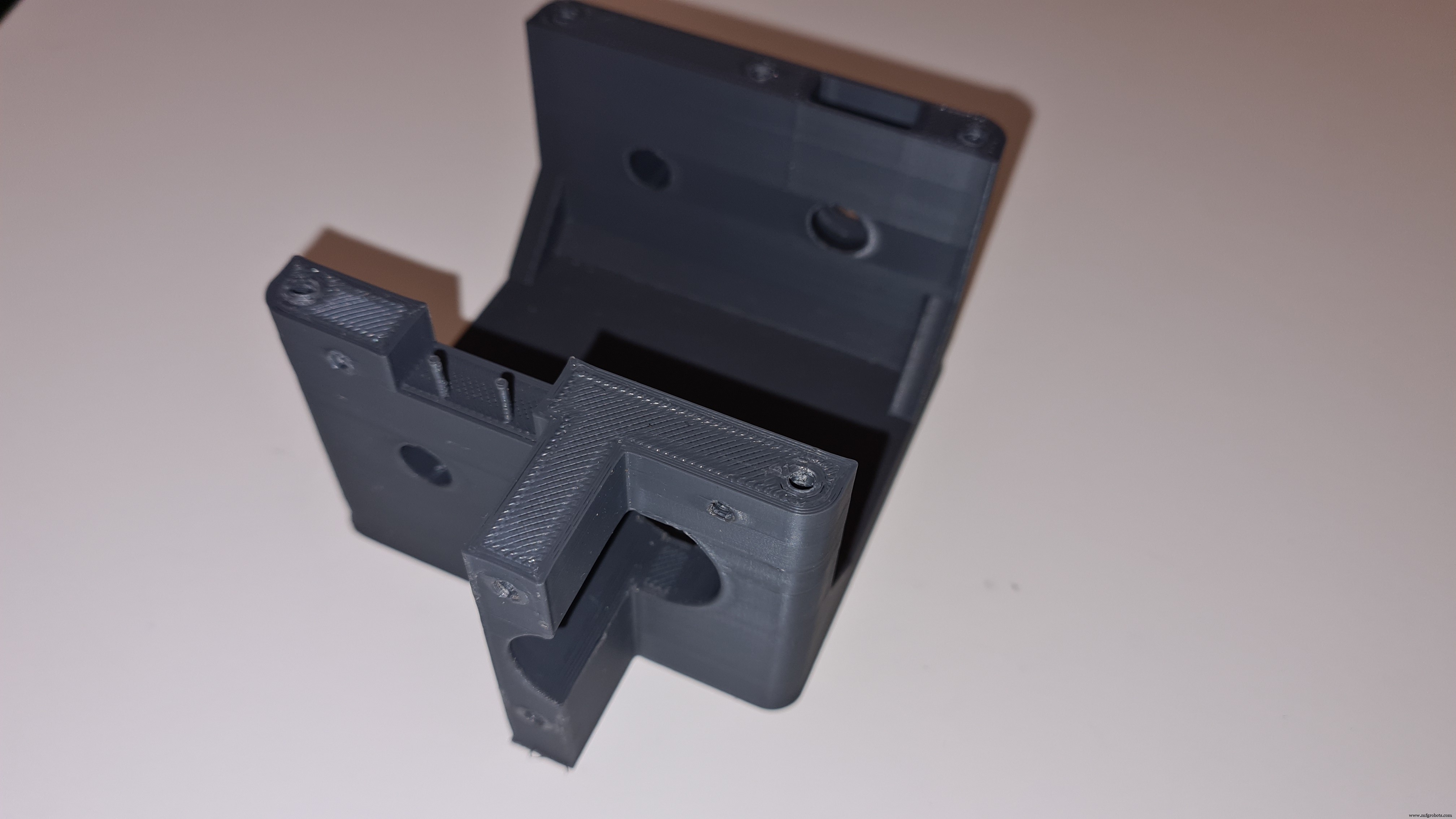
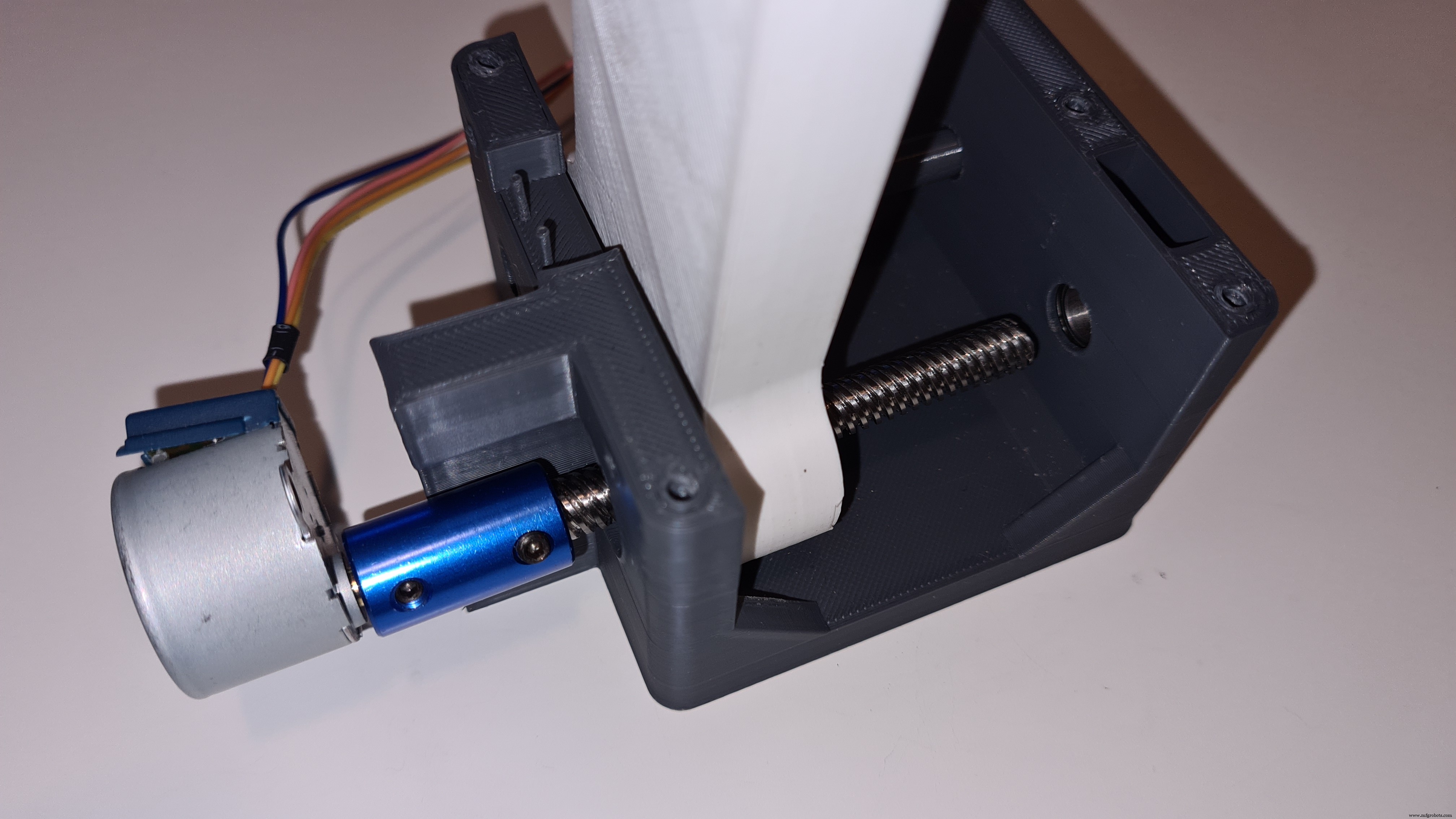
Paso 1:Comprenda el mecanismo
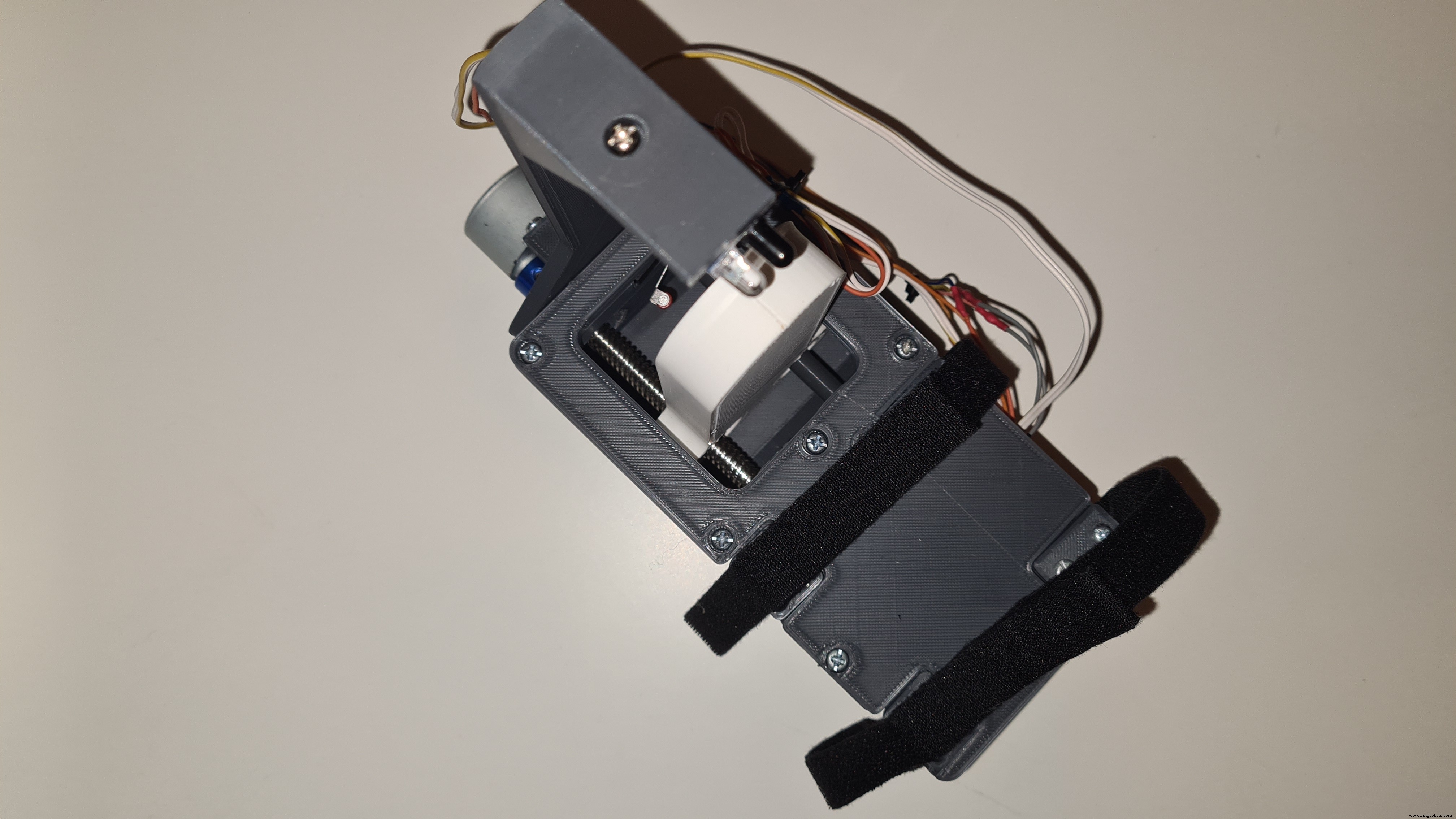


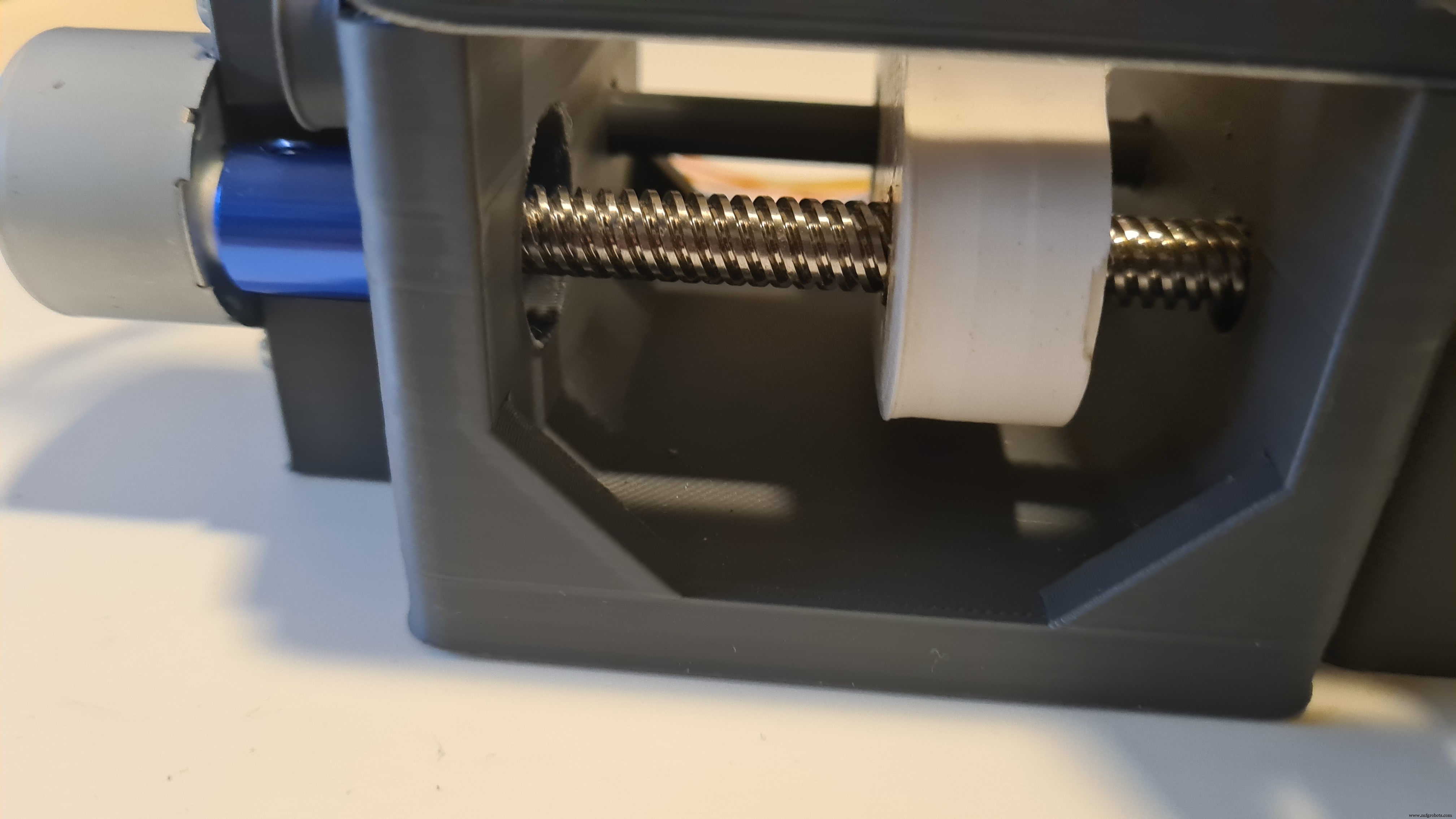
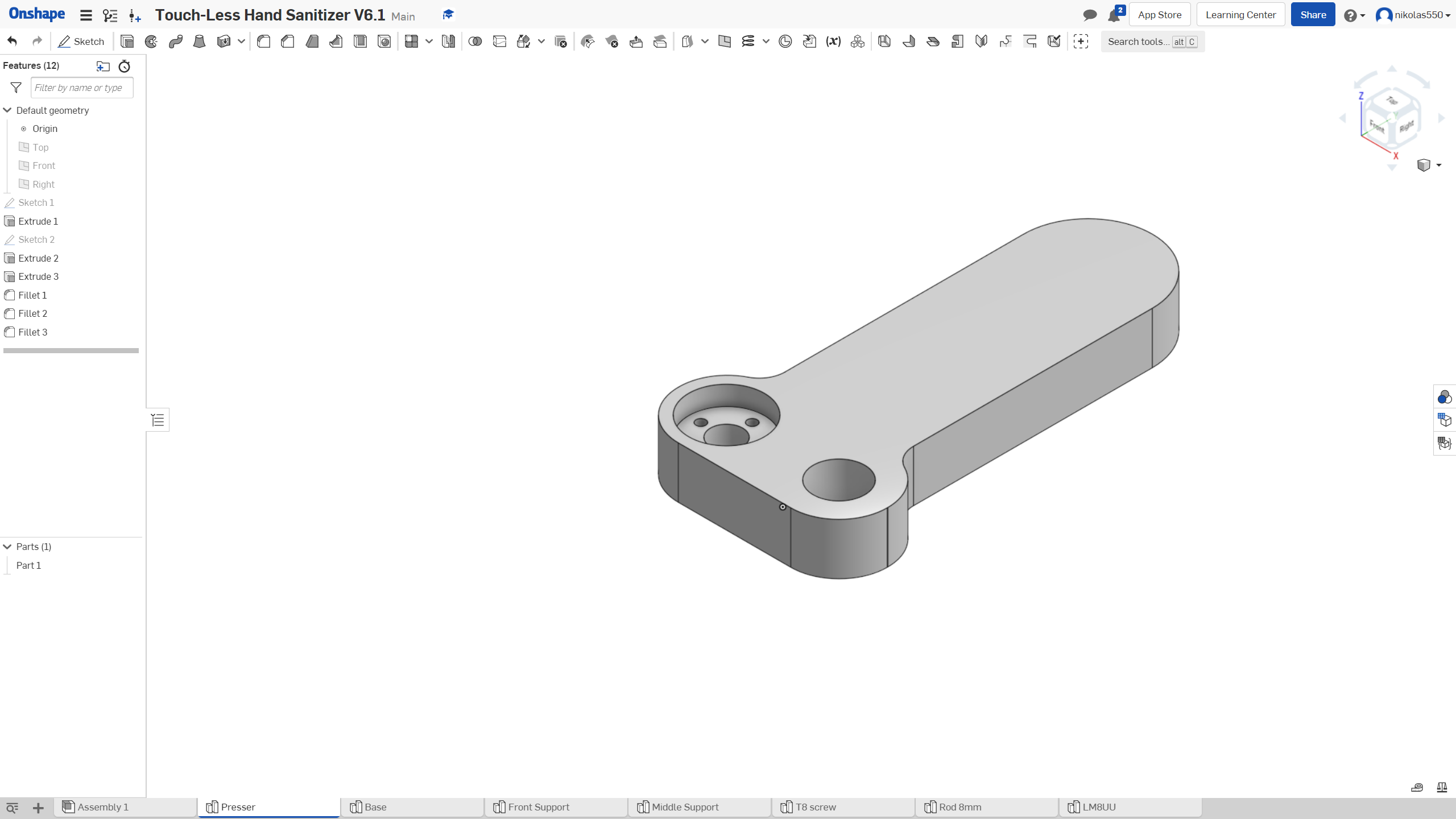
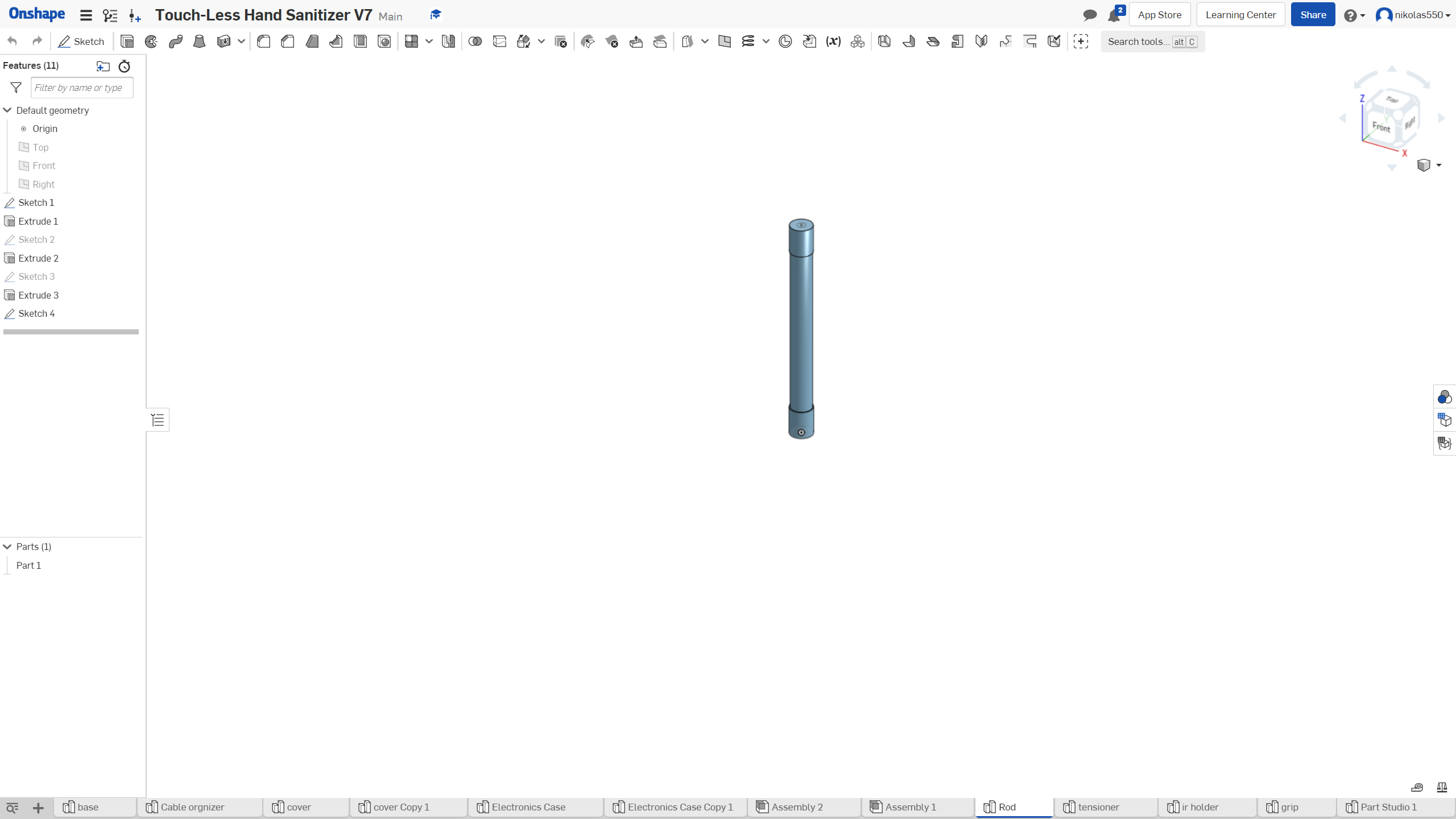
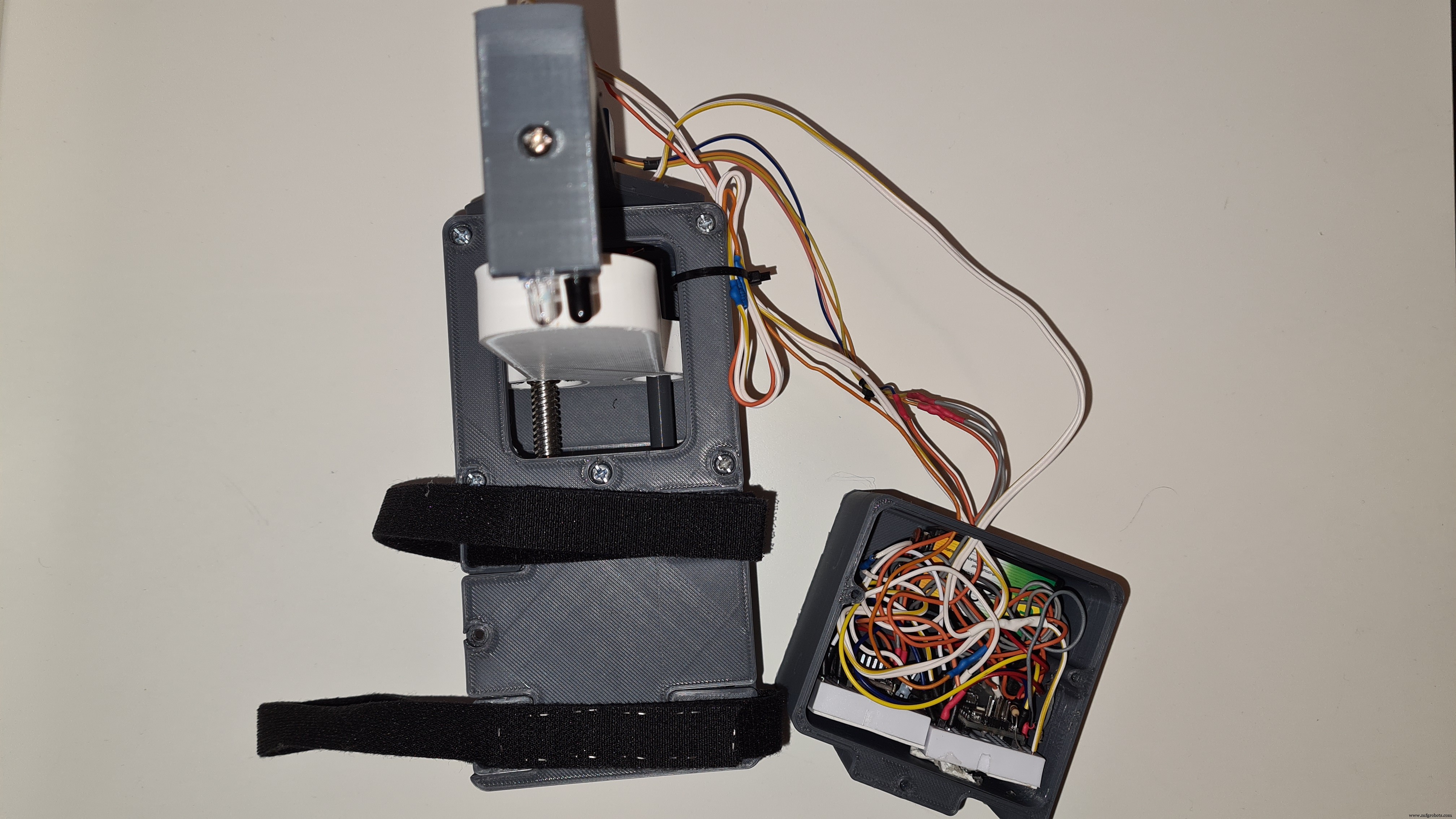
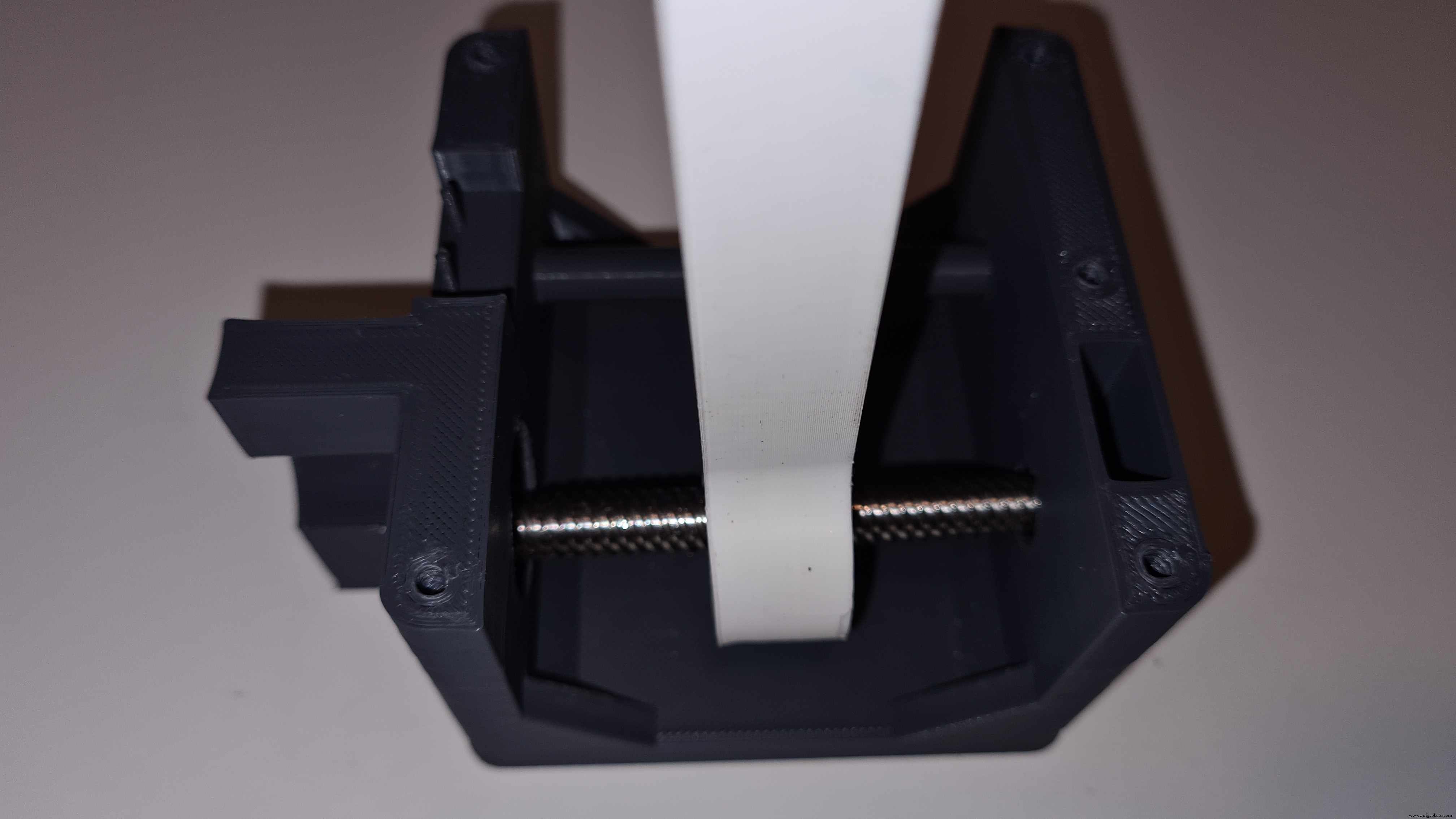
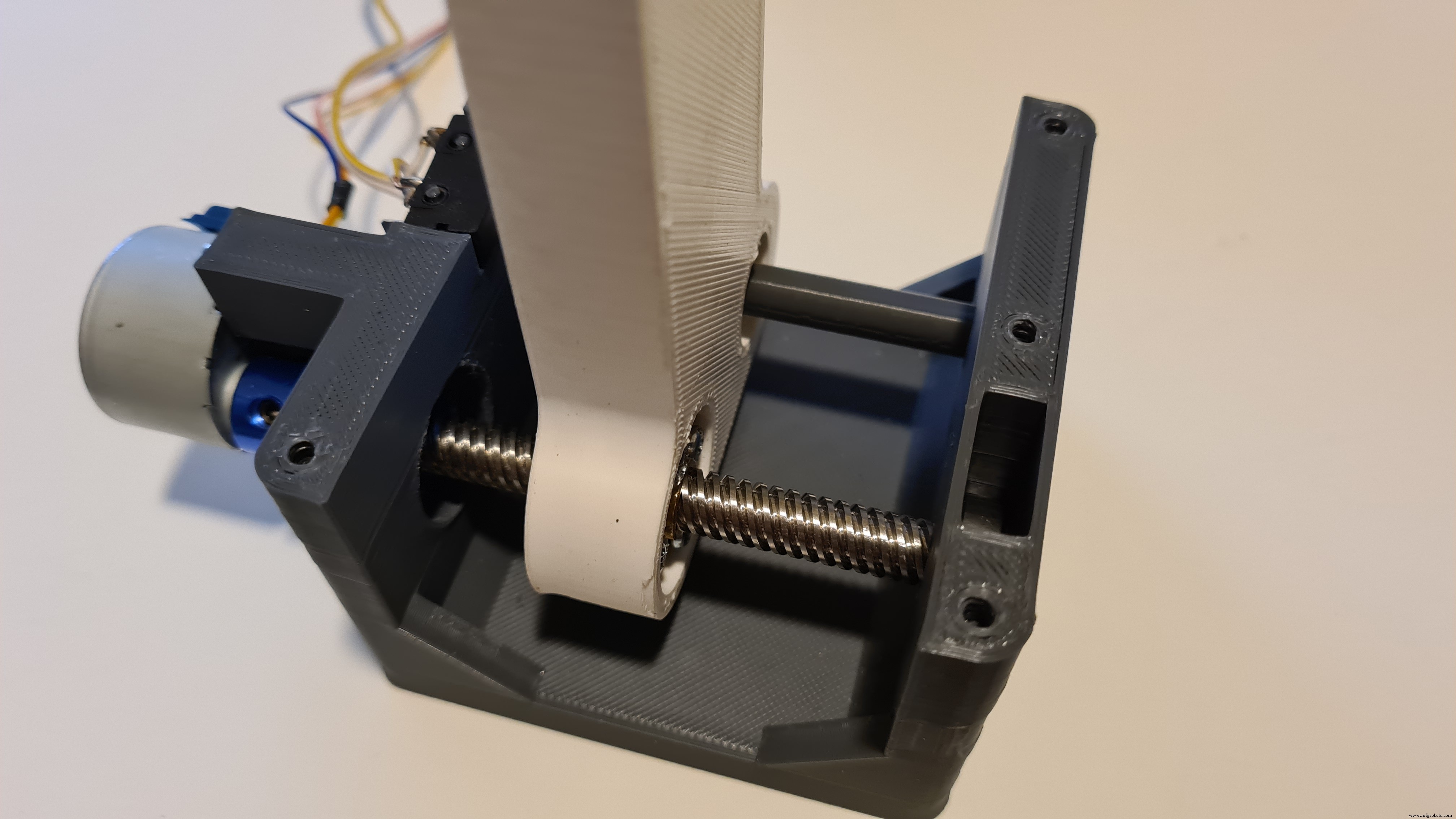
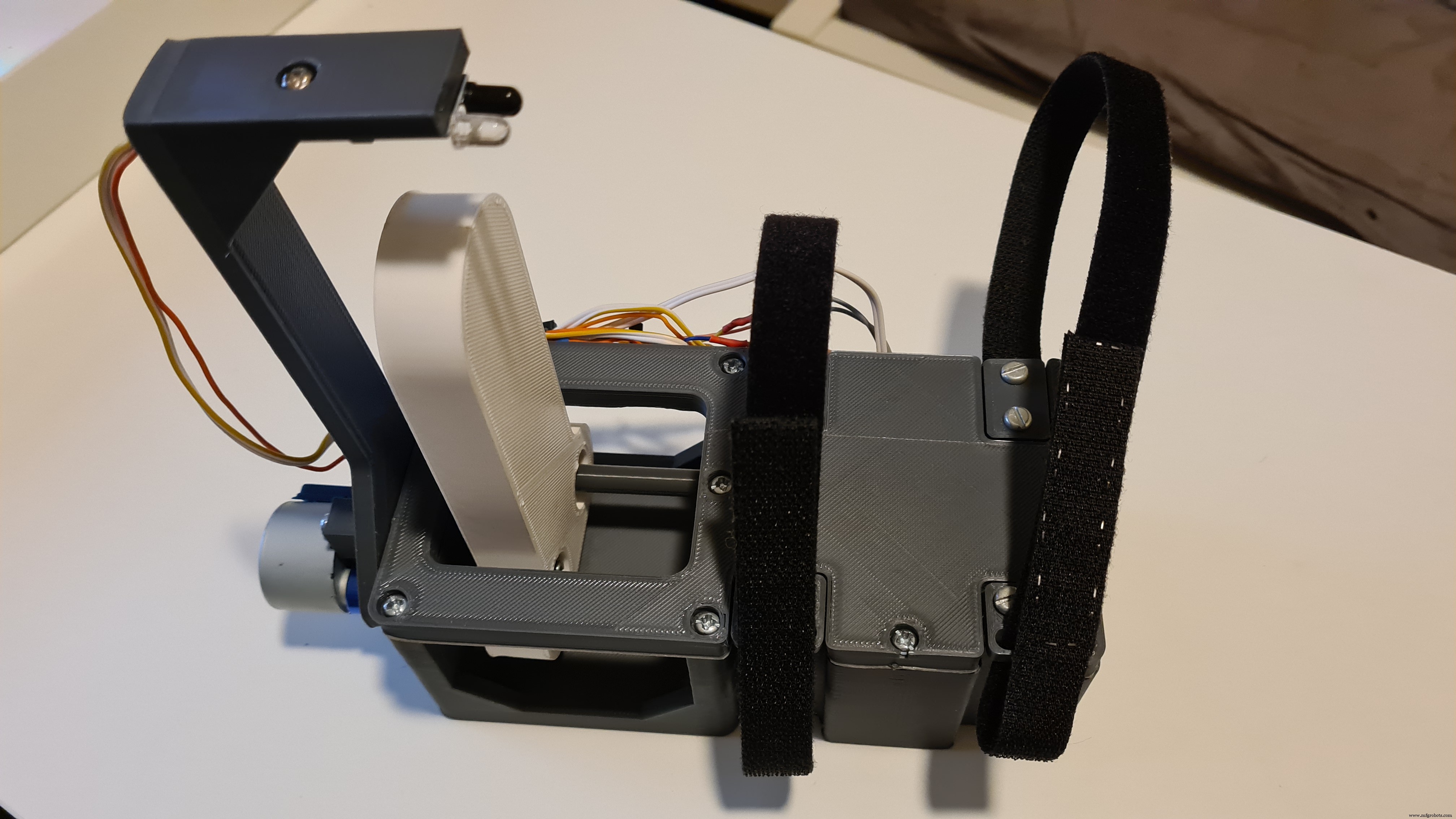
Entonces, básicamente, un motor paso a paso está conectado con un acoplador a un tornillo. Luego, el prensatelas impreso en 3D se conecta en un lado con el tornillo mediante una tuerca y en el otro lado se sostiene mediante una varilla impresa en 3D. La varilla no permite que la fuerza de rotación del tornillo gire el prensatelas y, en cambio, el prensatelas se mueve linealmente . De esta manera, podemos ordenar al paso a paso que se mueva en cualquier dirección (hacia adelante y hacia atrás), a cualquier velocidad y por tantos pasos como queramos.
Paso 2:comprender cómo funciona el dispositivo


El concepto es que cuando el sensor de obstáculos de infrarrojos, que está conectado al soporte de infrarrojos impreso en 3D, se activa, simplemente colocando la mano unos centímetros debajo de él, el prensatelas desciende una distancia establecida, (presionando el dispensador) espera 2 segundos y luego regresa a la posición inicial simplemente subiendo hasta que se activa el interruptor de fin de carrera. De manera similar, cuando el dispositivo se enciende por primera vez, el prensatelas subirá hasta que se active el interruptor y luego se detendrá allí, como una especie de autocalibración para que el prensatelas esté listo para su uso.


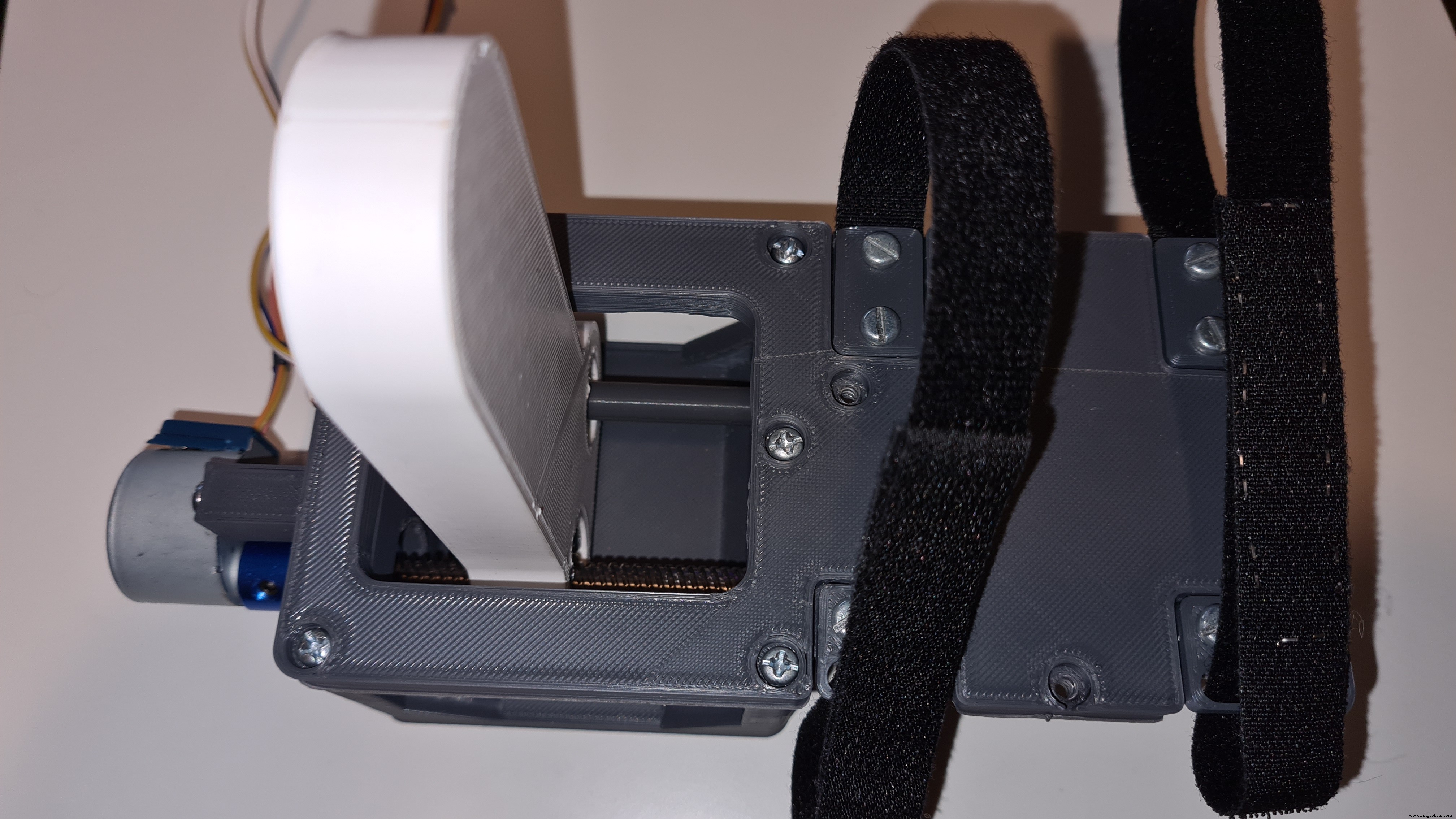
Luego, usando Velcros, envuelva el desinfectante de manos de su elección y apriételo tanto como sea posible.
¡¡Ahora el Dispensador Automático de Desinfectante para Manos es funcional !!
Paso 3:reúna los componentes necesarios
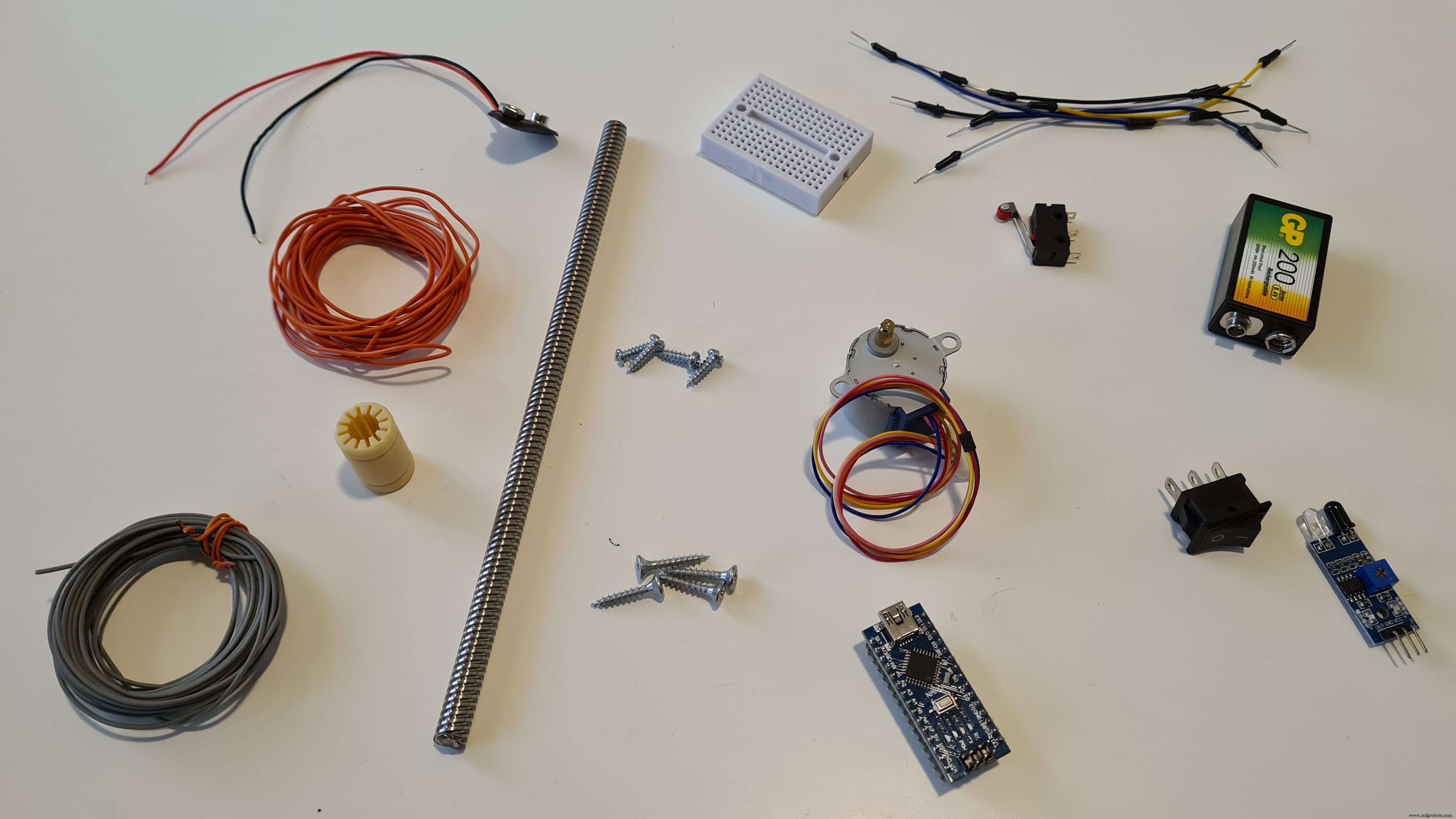
Todos los enlaces de los componentes necesarios se encuentran en la sección "Cosas".
Paso 4:diseñe piezas personalizadas
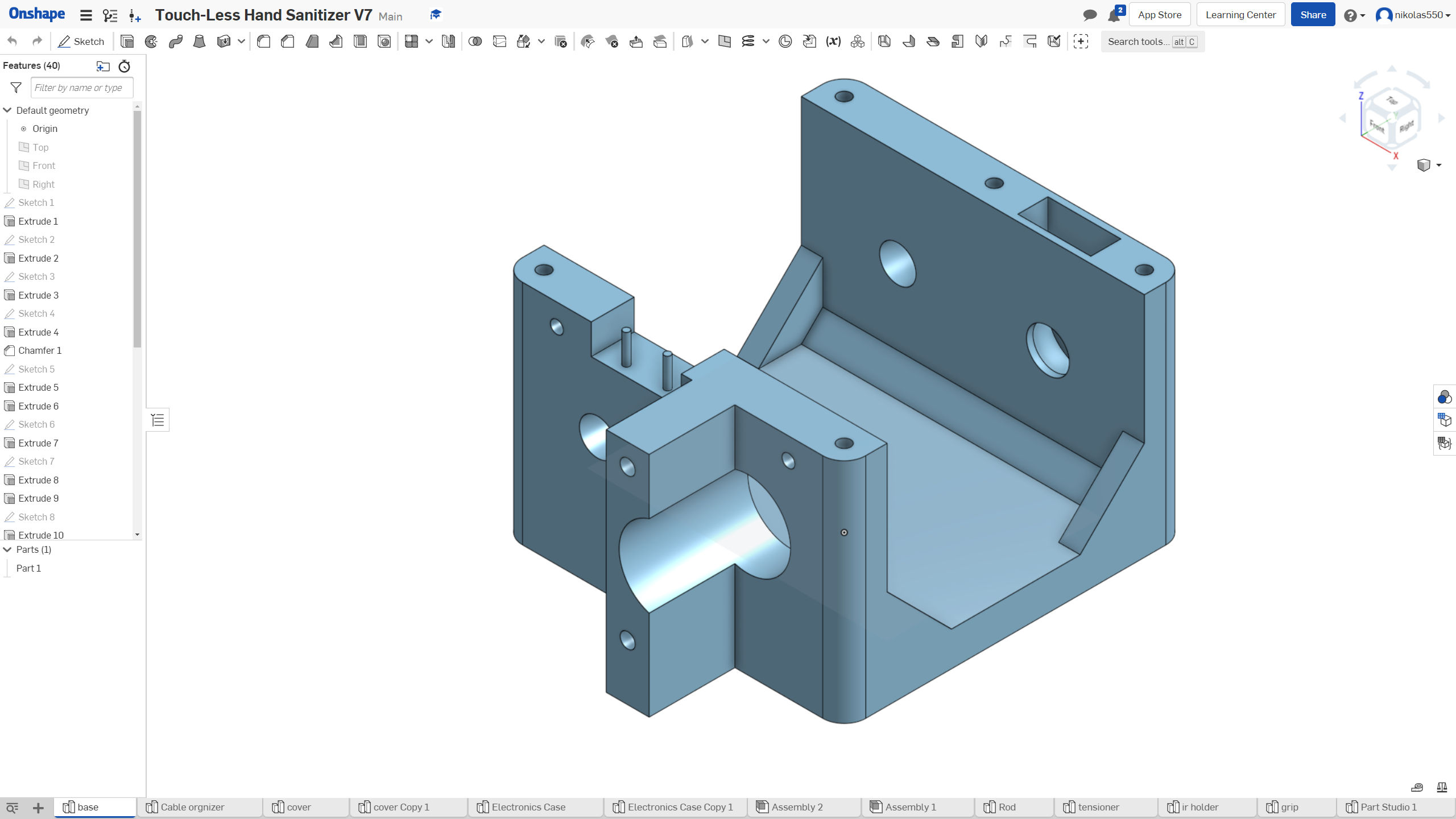
Todas las piezas impresas en 3D fueron diseñadas por mí en Onshape, pero no debe preocuparse por el diseño en 3D porque he proporcionado todos los archivos .stl en la sección "Archivos adjuntos".
Paso 5:Impresión 3D de piezas de plástico personalizadas




Imprimí en 3D las piezas de mi Creality3D Ender 3 V2 en PLA gris y blanco a una altura de capa de 0,2 mm y con un relleno del 20%. Si no tiene acceso a una impresora 3D, puede intentar usar cartón o madera.
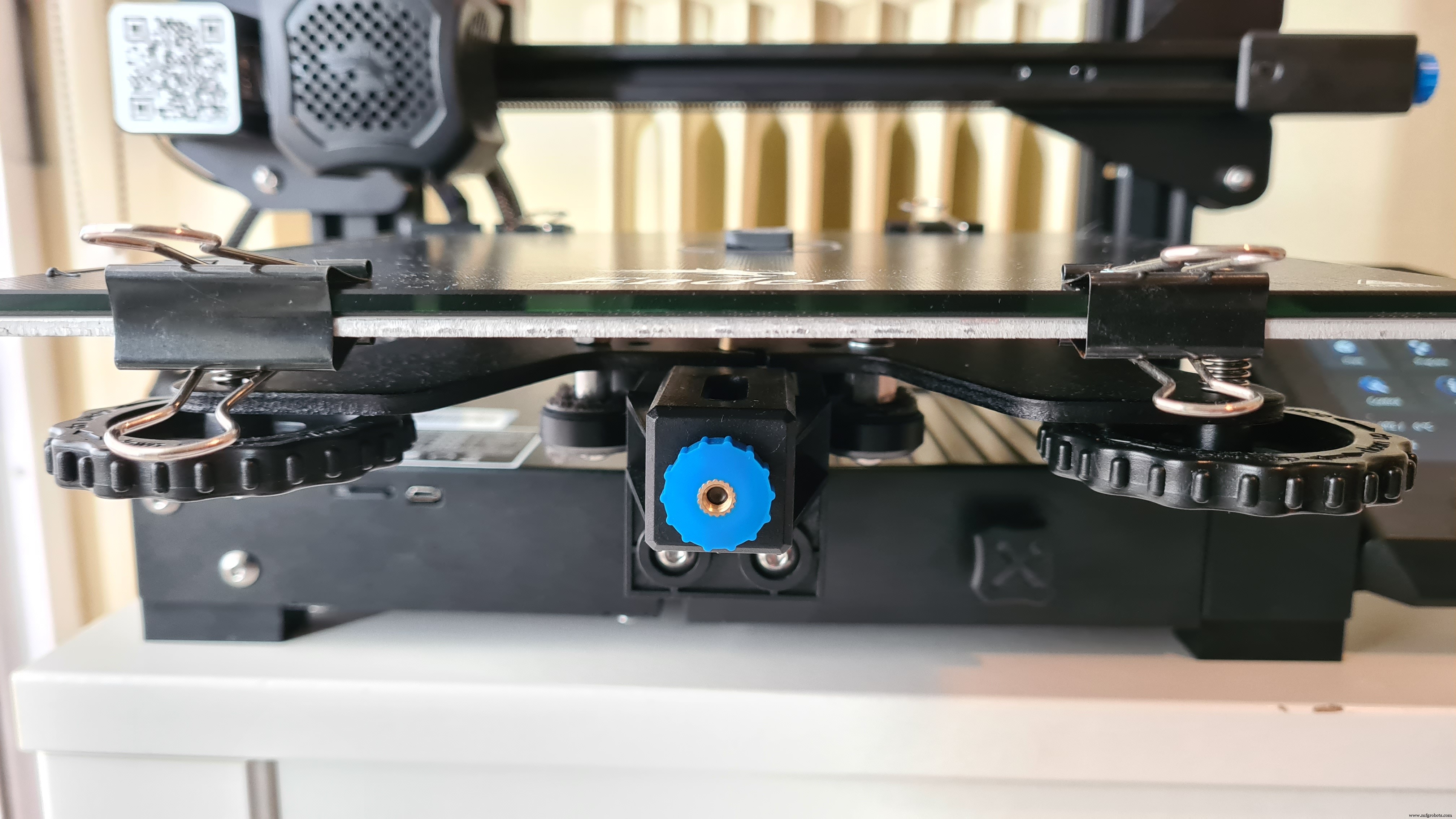
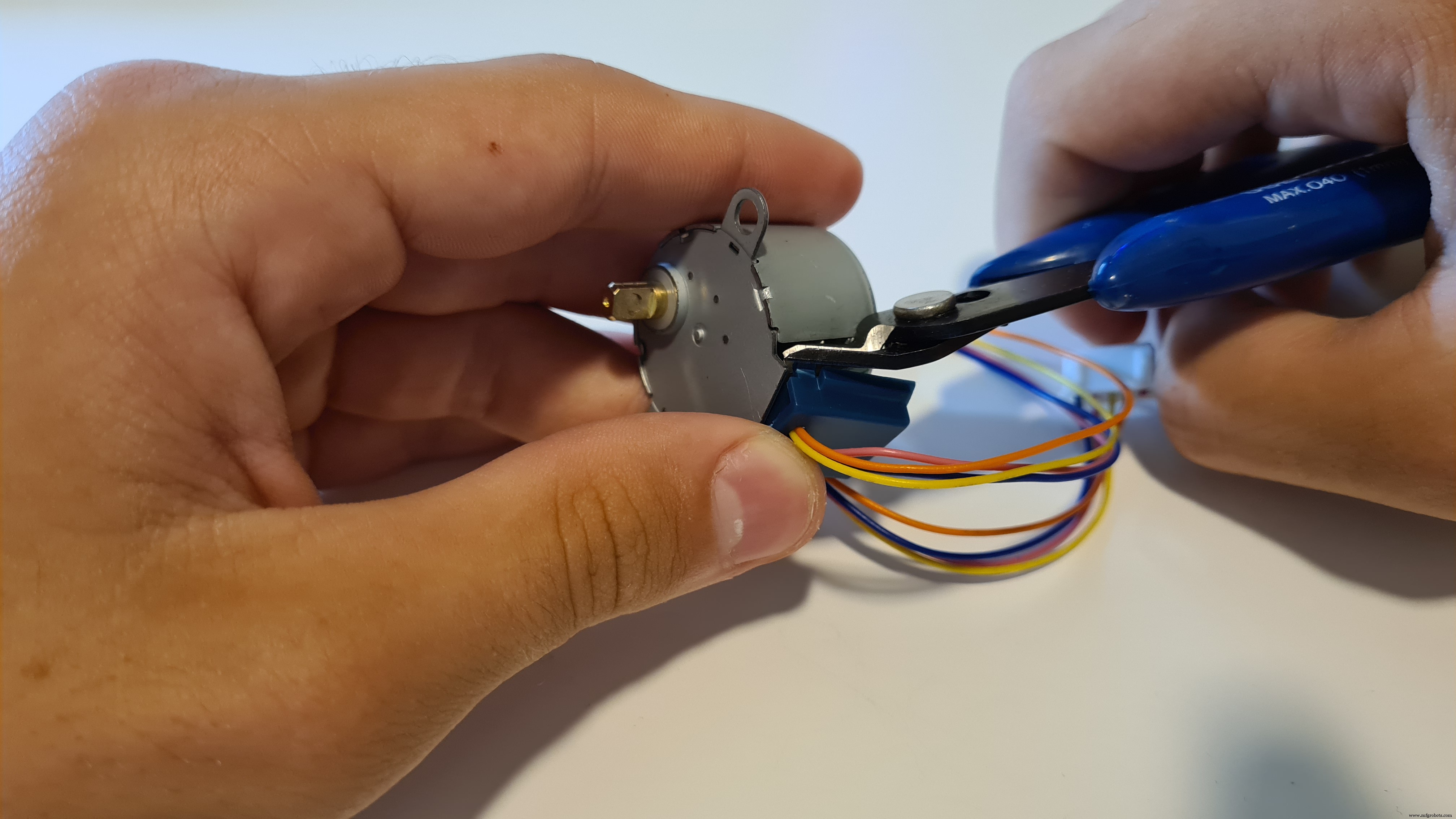
Paso 6:Modificación del paso a paso

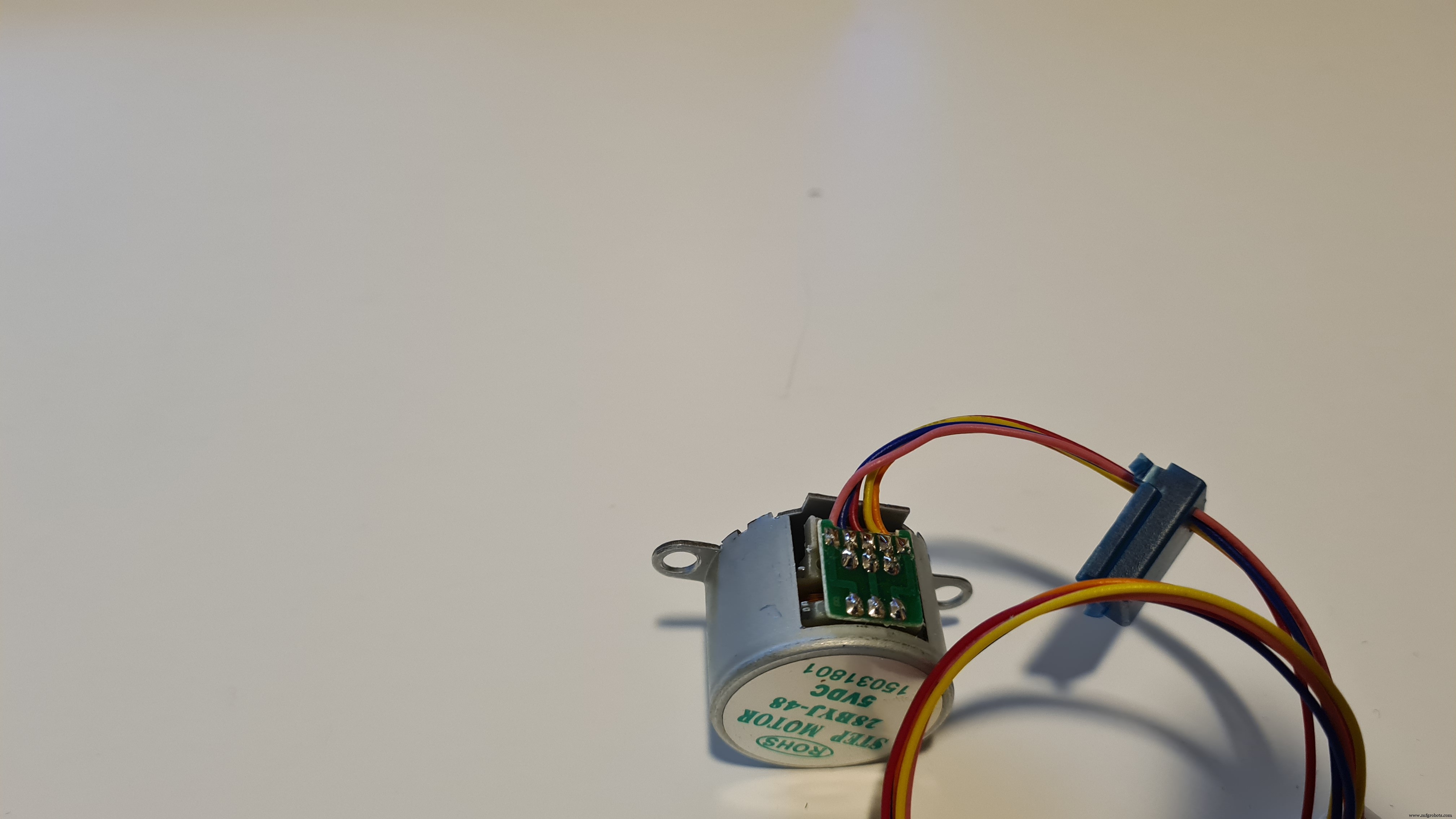
El motor paso a paso 28BYJ-48 es un motor paso a paso pequeño y realmente económico. Es un motor paso a paso unipolar y tiene un par de aproximadamente 300 g / cm que funciona con nuestro proyecto, pero quiero que sea más fuerte para obtener mejores resultados. Podemos aumentar el par a 800+ g / cm convirtiendo a un bipolar motor con un mod simple y fácil!
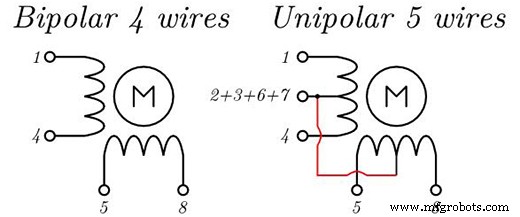
Los motores paso a paso bipolares tienen bobinas más grandes y, como resultado, mucho más torque .

En primer lugar, desea quitar la cubierta azul con un destornillador.
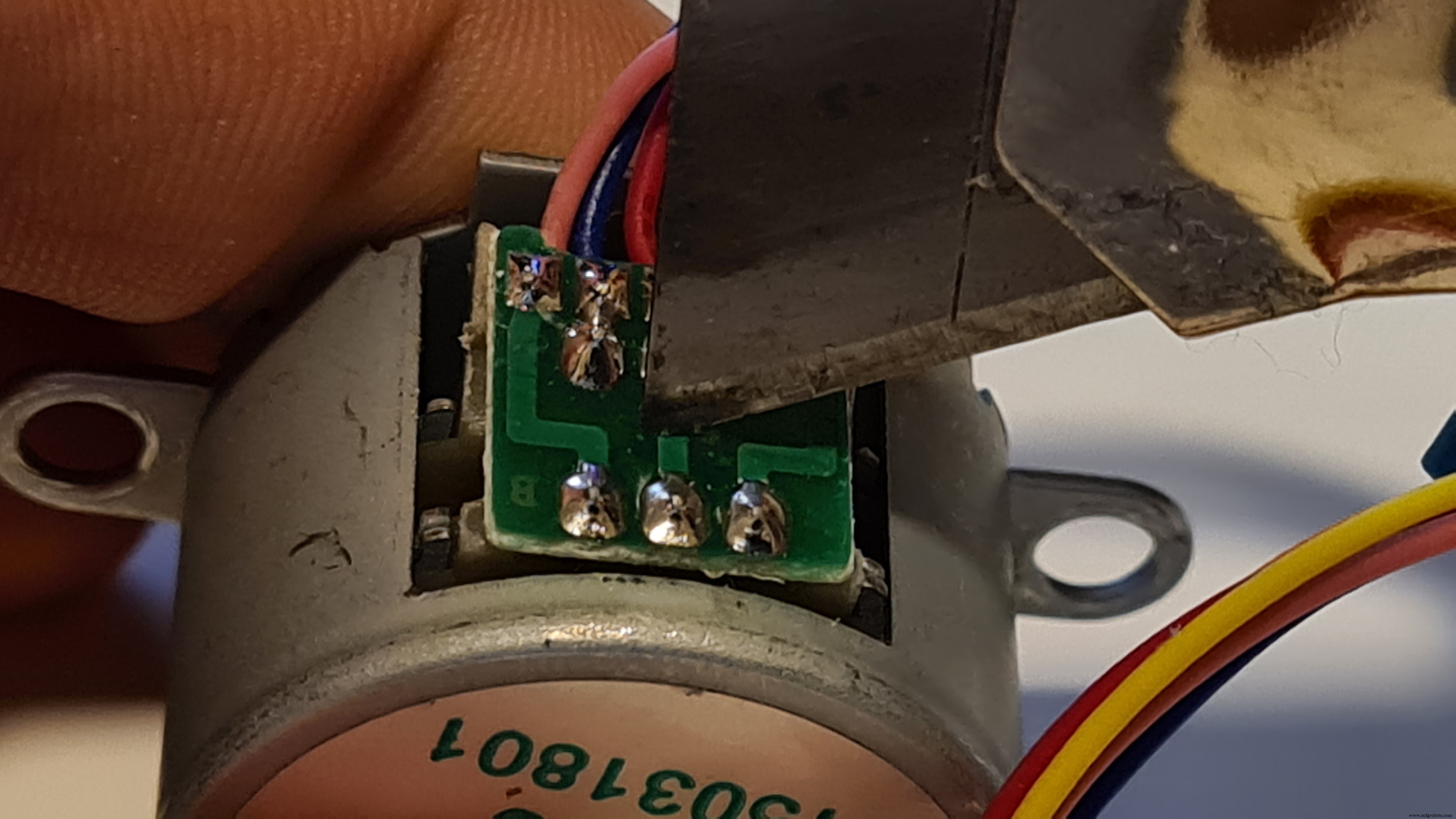
Una vez retirado, debe cortar completamente el rastro del medio que sube hasta el cable rojo con un cuchillo.
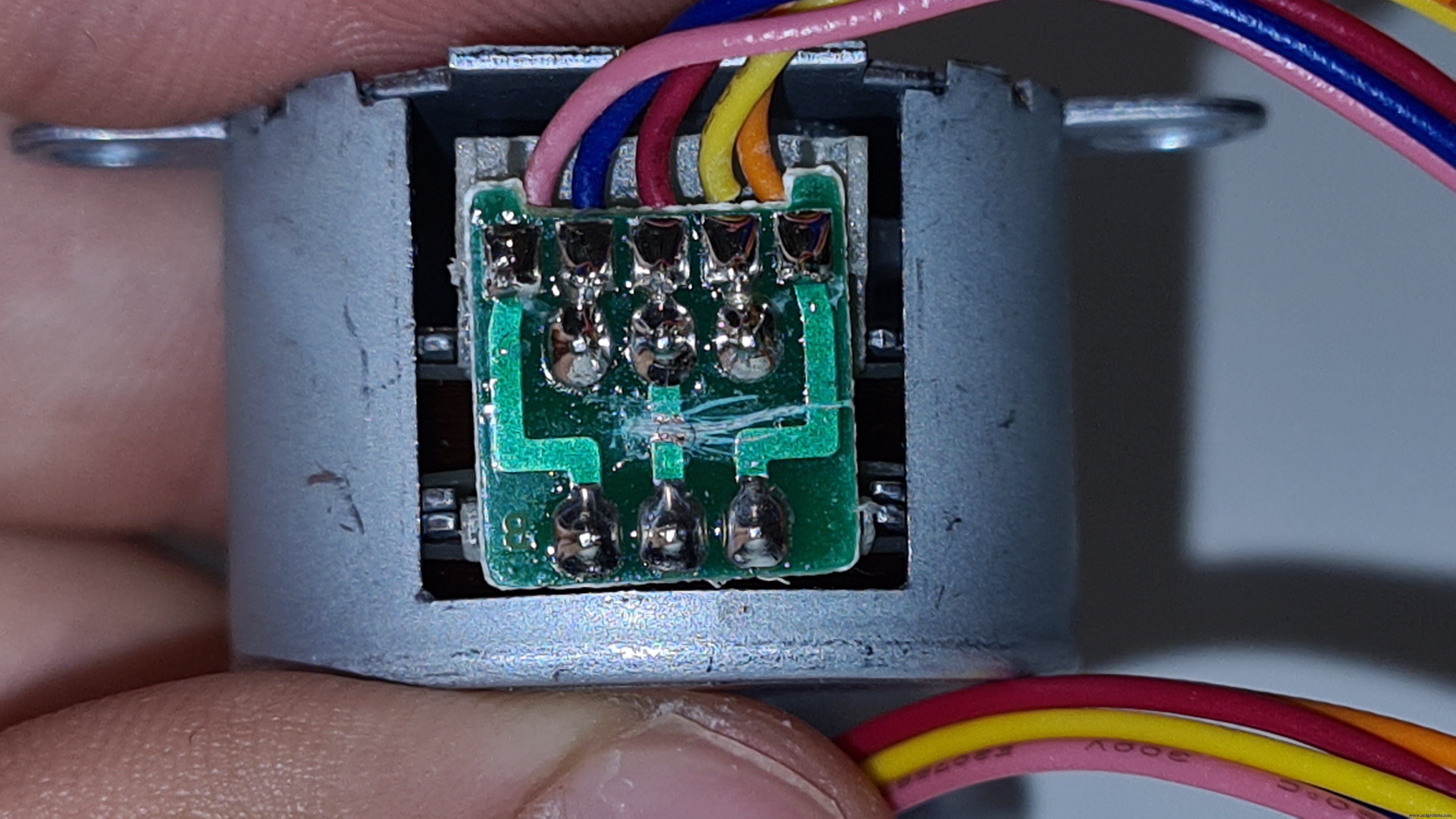
Quiere asegurarse de que no conectar en absoluto.
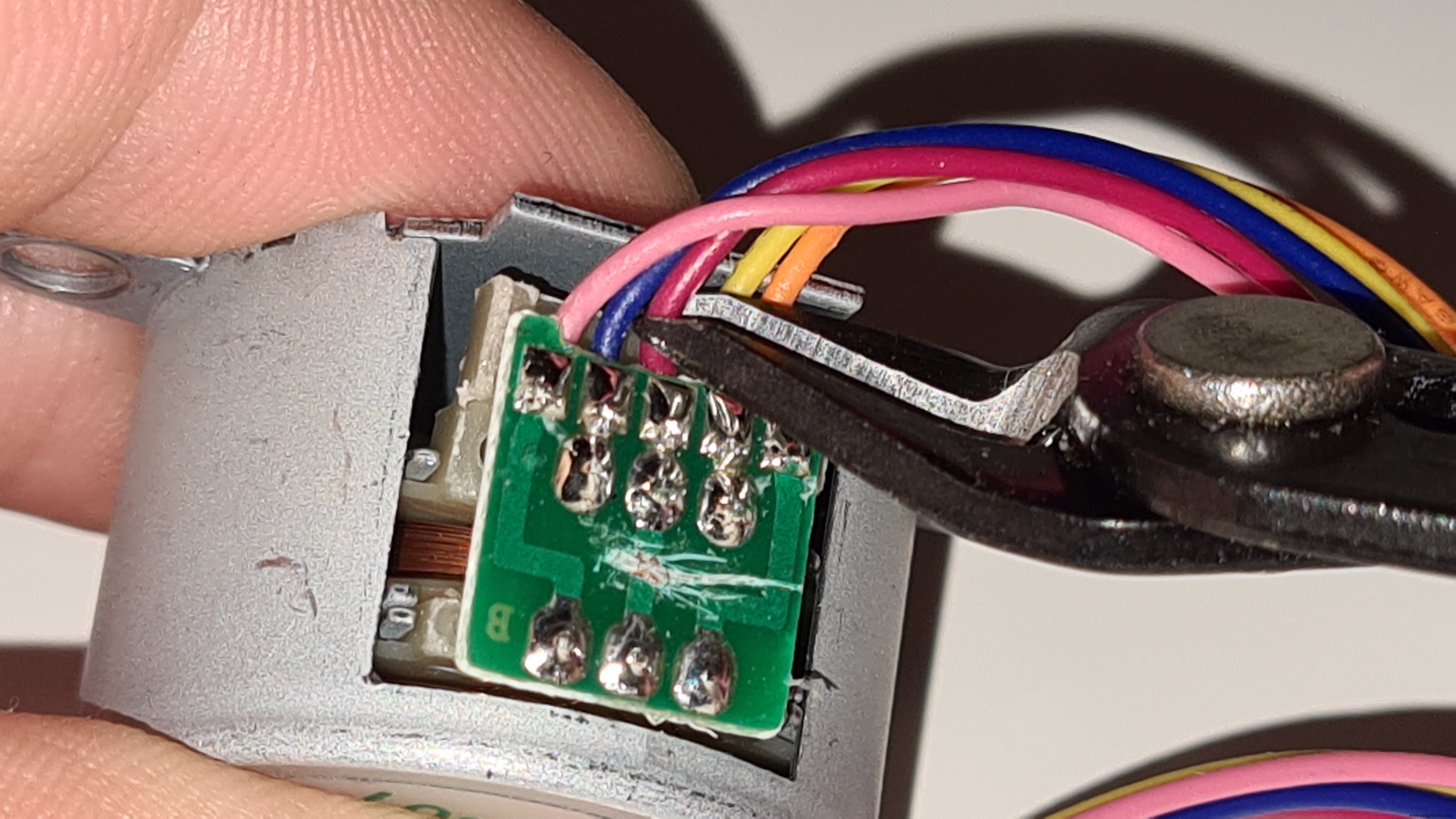
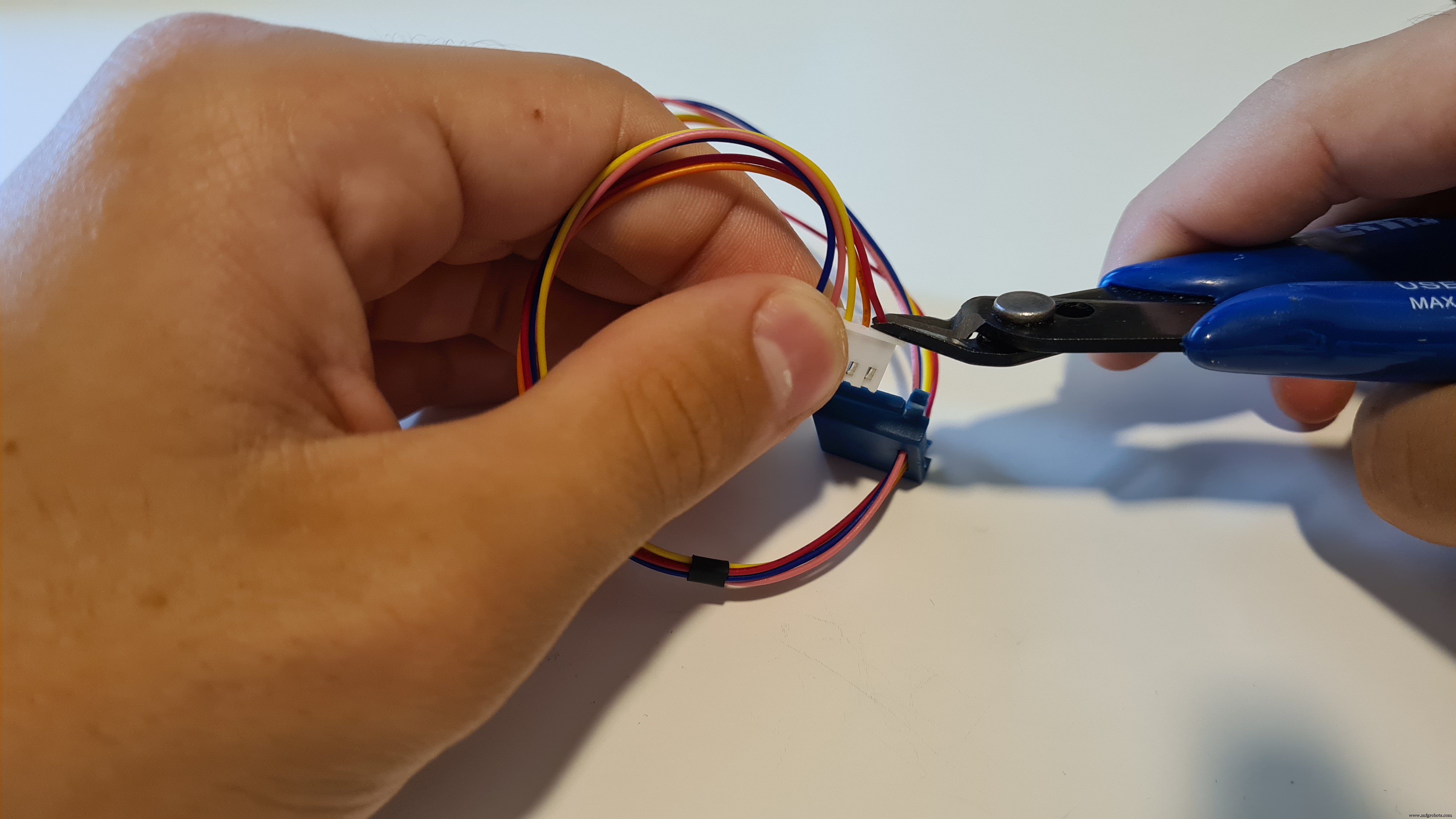
Ahora puede cortar el cable rojo de ambos lados.
Puede volver a colocar la cubierta azul ahora. Necesitaba cortar 2 de sus soportes para poder volver a colocarlo.
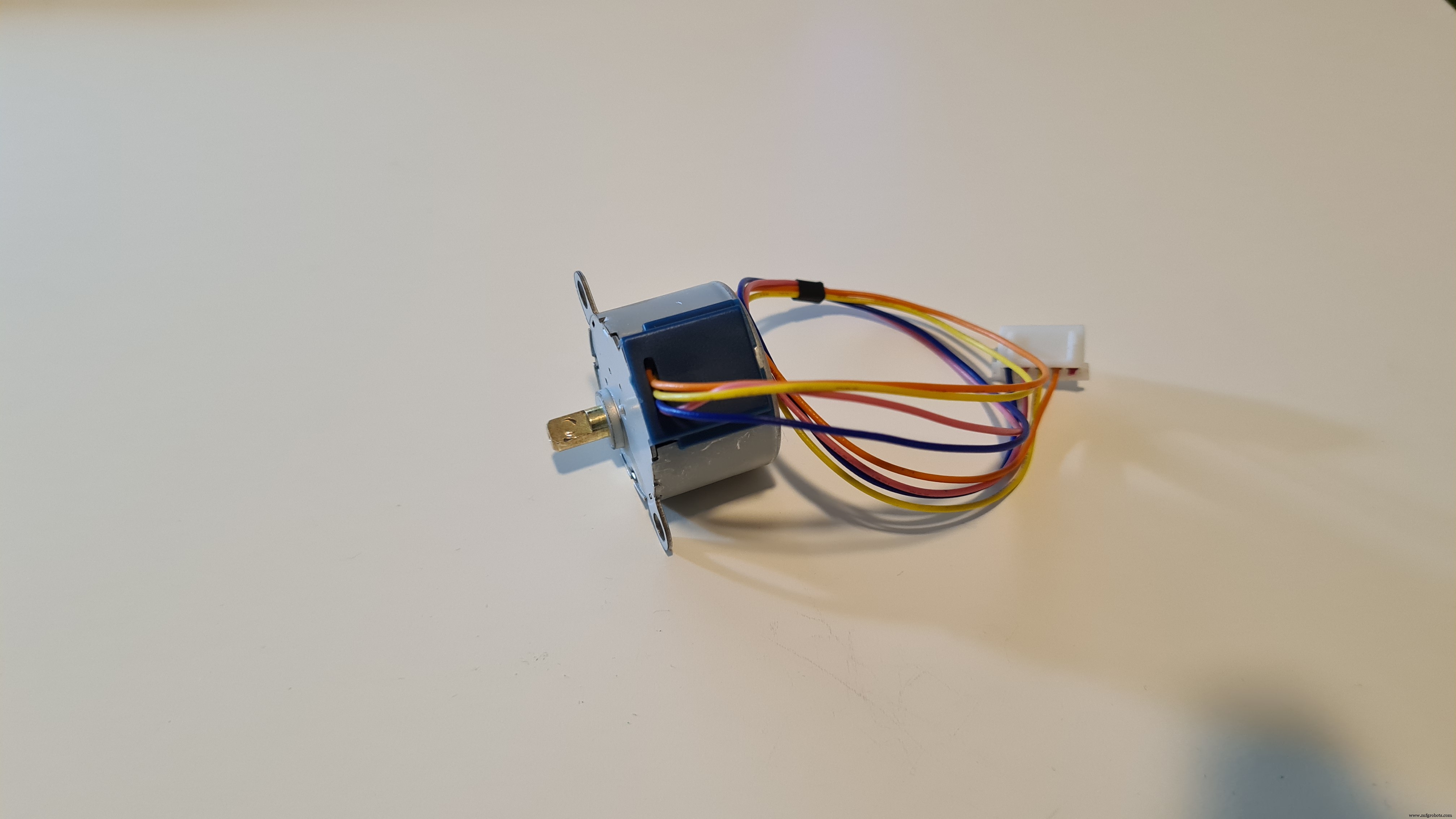
Ahora tienes tu propio motor paso a paso bipolar 28BYJ-48. Tiene aproximadamente 2,5 veces el par inicial. Sin embargo, ahora necesitará un controlador paso a paso bipolar como el DRV8825 que estoy usando. El suministro de voltaje mínimo para el controlador tiene una potencia nominal de 8,4 V y nuestro motor tiene una potencia nominal de 5 V. ¡Pero no se preocupe, la versión bipolar del motor puede manejar fácilmente ese voltaje!
Paso 7:bricolaje con lazos de velcro x2

Es hora de hacer las bridas de velcro que unirán el accesorio al dispensador. Si ya tiene algunas bridas de velcro, no dude en utilizarlas.

Puede hacerlos tan largos o tan cortos como desee, pero sugeriría cortar una parte a 30 cm - 40 cm y la otra a 4 cm - 7 cm.

Ahora quieres engrapar las dos partes juntas. Asegúrese de que los lados que se van a engrapar juntos sean ásperos o blandos.
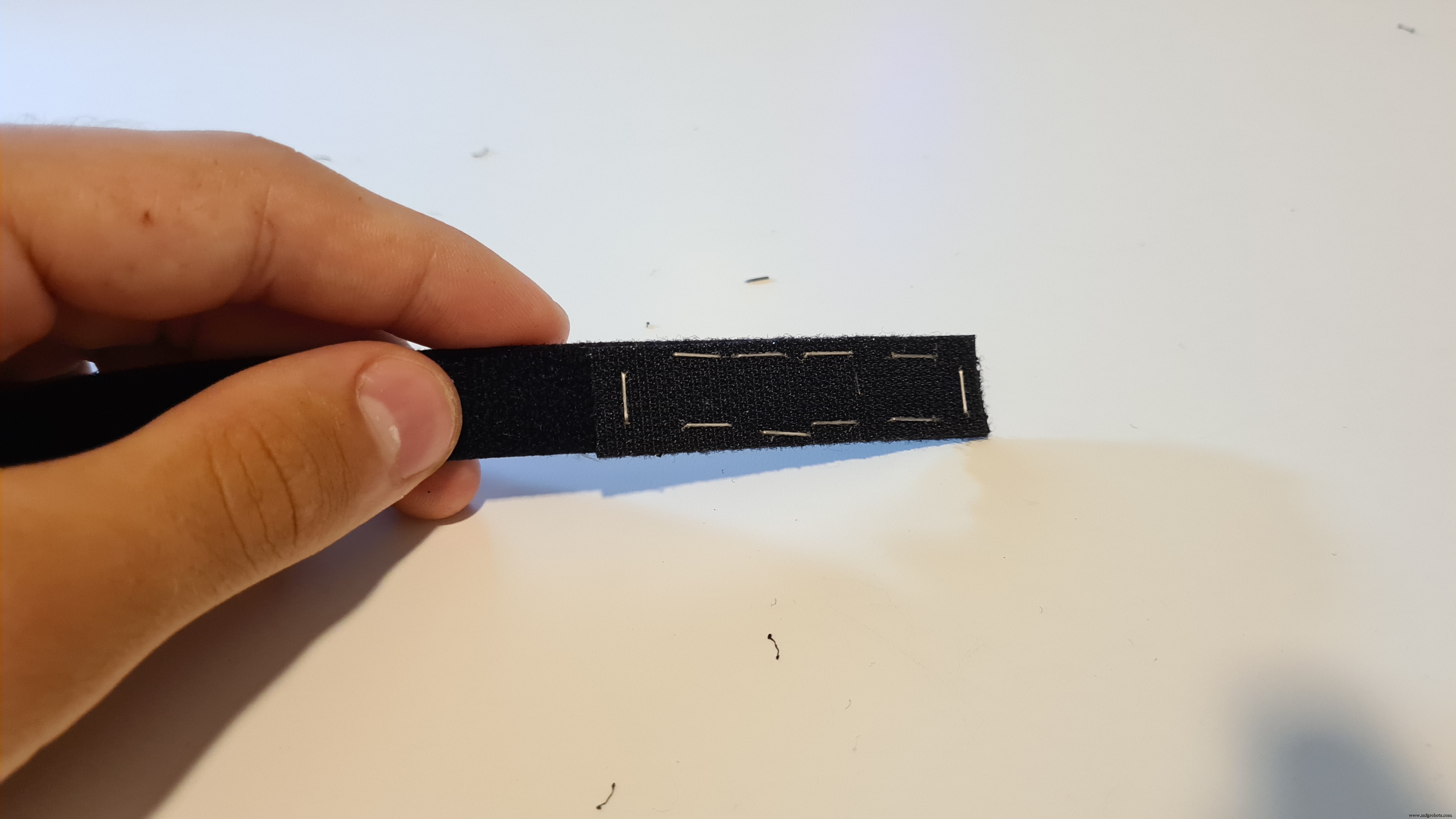
¡Ahora su corbata de velcro está lista para usar!


Necesitará dos de estos.
Paso 8:circuito
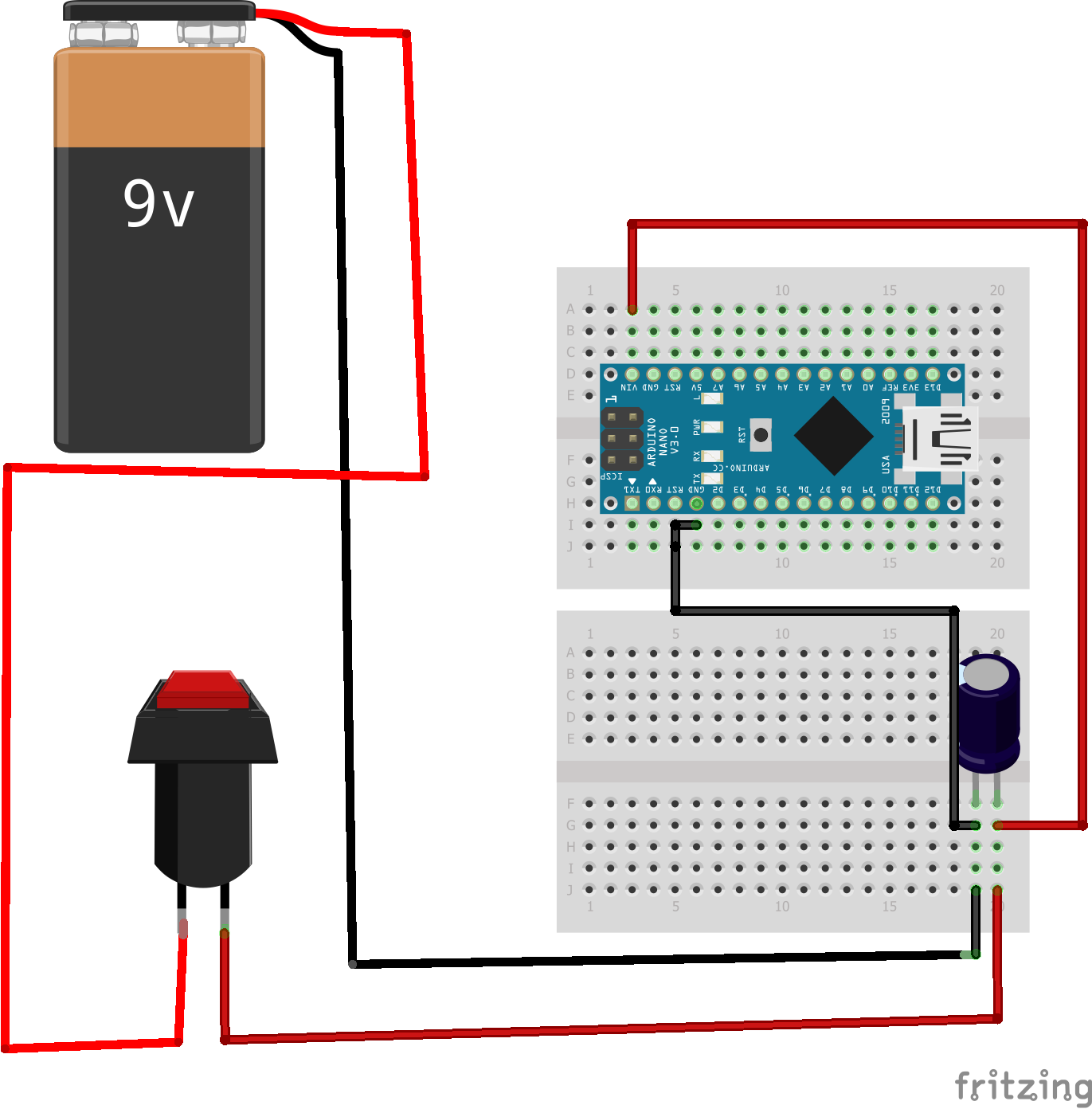
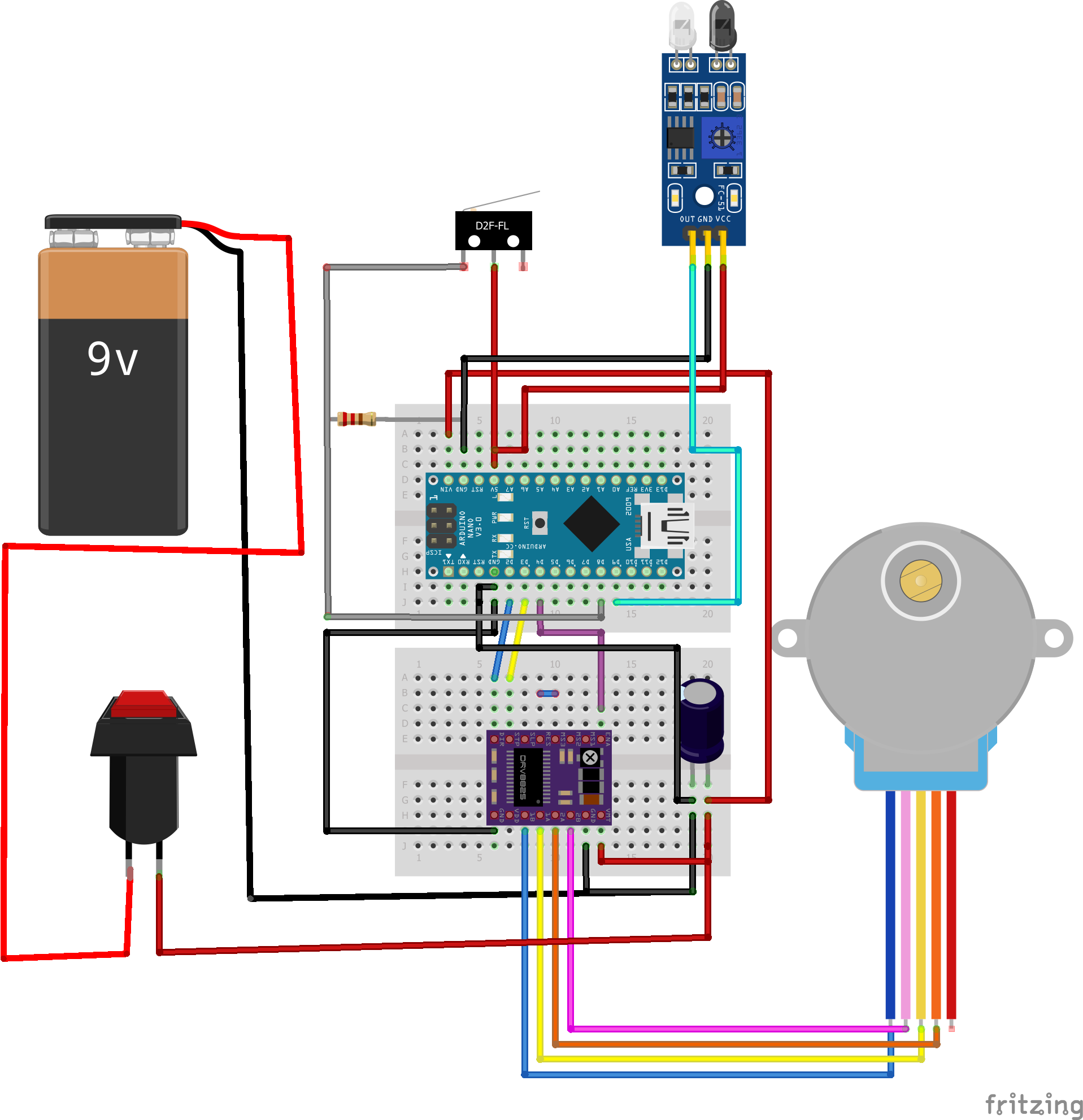
¡Es hora de crear el circuito electrónico! Para empezar, conecte la tierra de la batería de 9V a la tierra de Arduino con un capacitor electrolítico de 100μF en el medio (recuerde que el lado del capacitor con la línea blanca es la tierra / cátodo). Conecte el 9V a un interruptor de encendido / apagado genérico y luego a Vin en el ánodo del capacitor. Estoy usando dos mini placas de prueba porque encajan bien dentro de la caja, use la placa que desee, pero tenga en cuenta el espacio limitado.
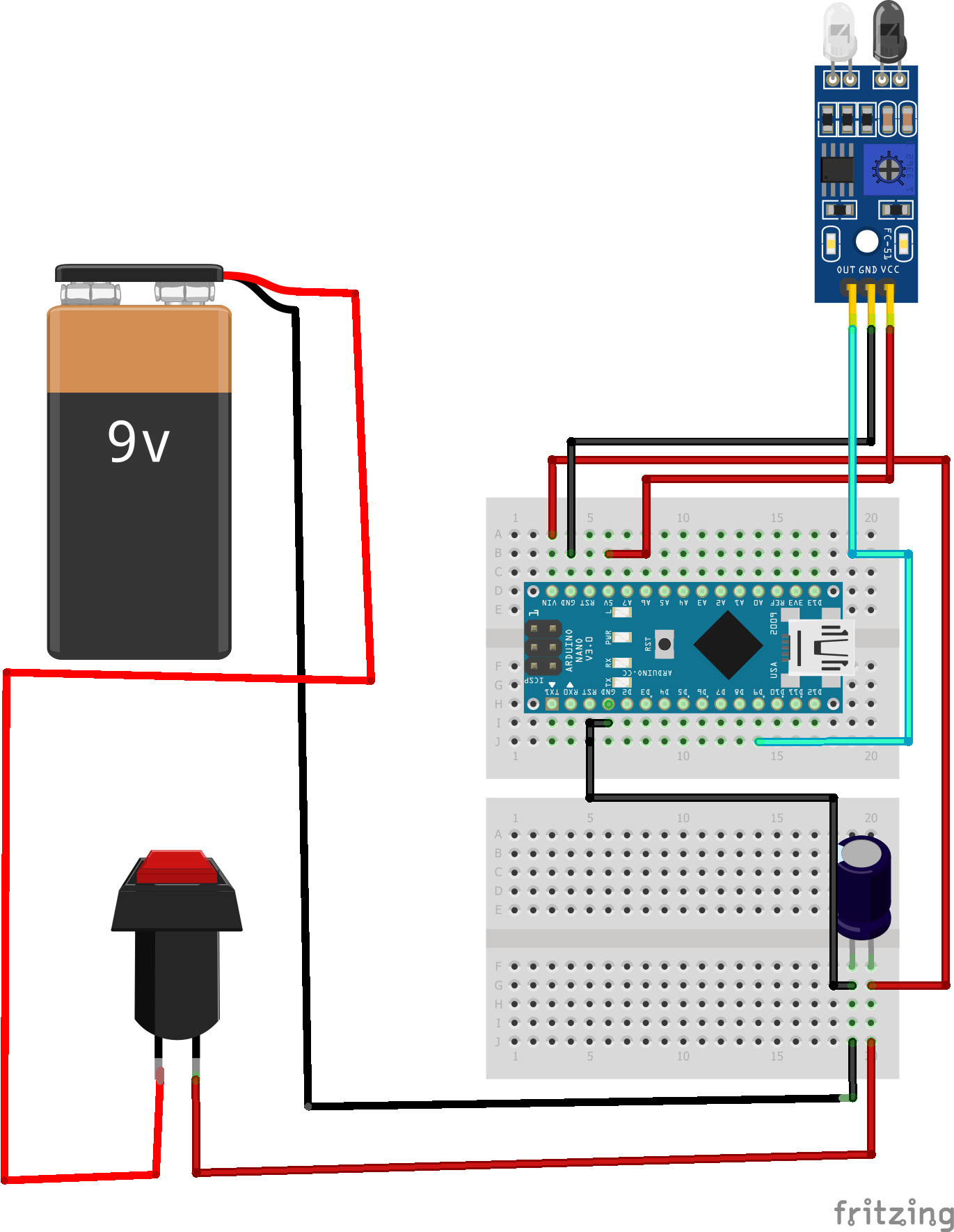
Conecte el sensor de obstáculos IR VCC a 5 V, tierra a tierra y finalmente SALIDA al pin digital 9.

Ahora vamos a conectar el interruptor de fin de carrera. Conecte la pata común a 5V y la normalmente abierta al pin digital 8 y a tierra a través de una resistencia de 1kΩ.
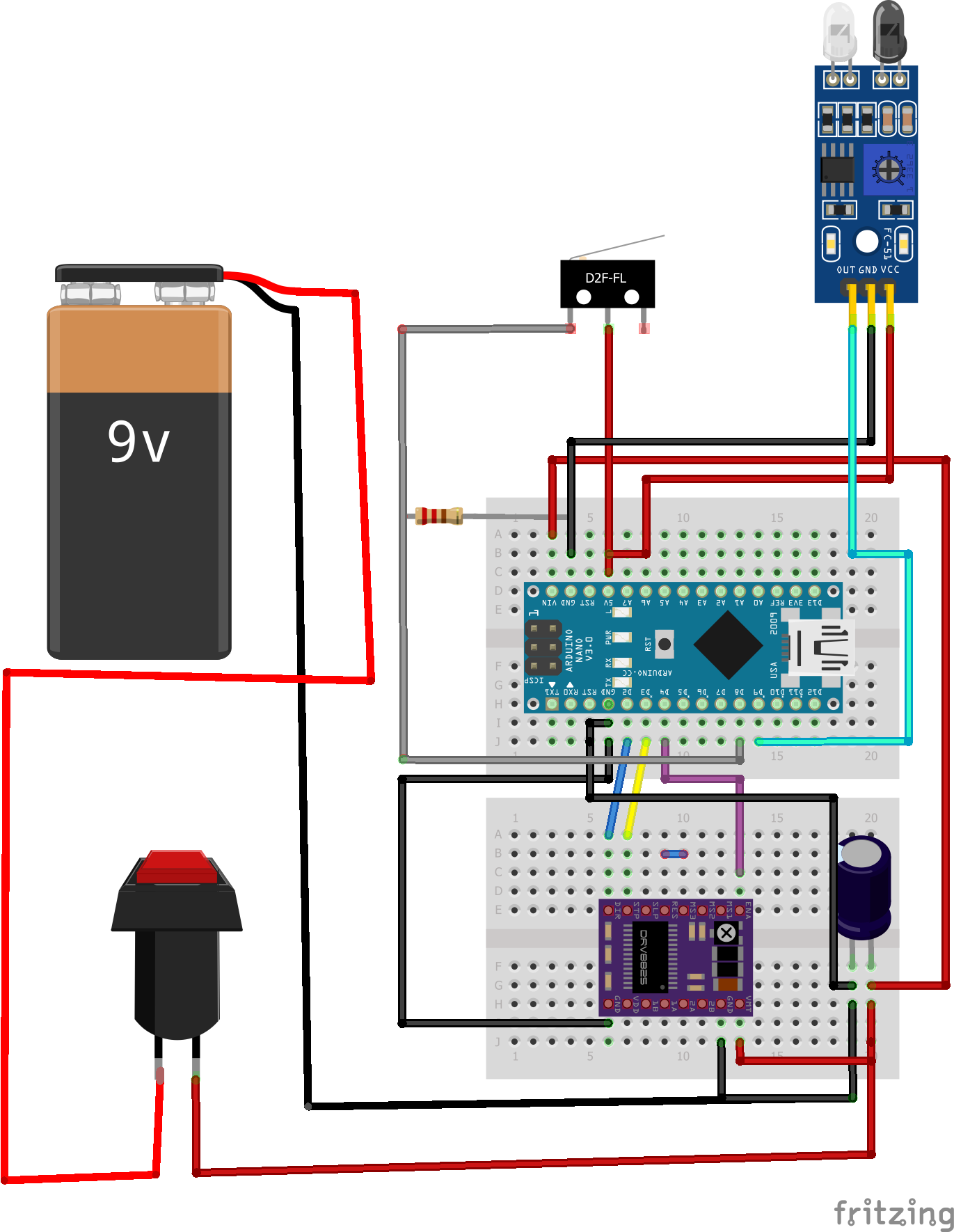
Agregue el controlador de motor bipolar DRV8825 a la placa de pruebas. Conecte el Vmot al Vin del Arduino. Conecte las dos conexiones a tierra a tierra. Conecte el pin Dir al pin Digital 2, el pin Step al pin Digital 3, el pin Habilitar al pin Digital 4. Conecte el pin Reset y Sleep entre sí.
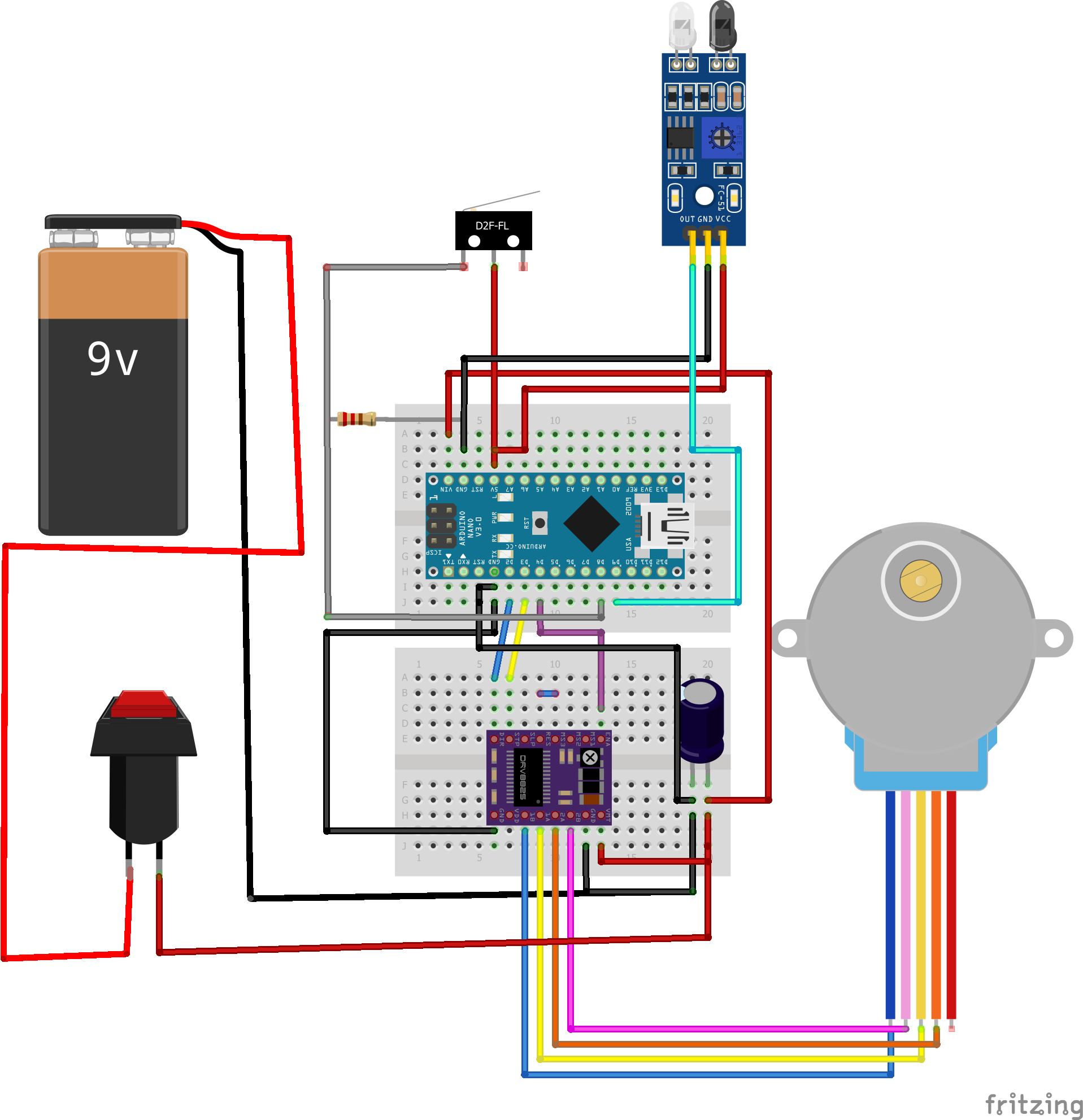
Por último, conecte el cable azul del 28BYJ-48 a A2, el cable amarillo a A1, el cable naranja a B1 y el cable rosa a B2.
¡La electrónica finalmente está conectada!
Paso 9:Programación
const int dirPin =2; Definimos el pin Dir del controlador como el pin digital 2.
const int stepPin =3; Definimos el pin de paso del controlador como el pin digital 3.
const int enablePin =4; Definimos el pin Habilitar del controlador como el pin digital 4.
const int stepsPerRevolution =6000; Definimos el número de pasos por revolución como 6000, una rotación de 360 grados equivale a 2048 pasos.
int endStop =8; Definimos el pin de entrada del interruptor endStop como el pin digital 8.
int irSensor =9; Definimos el pin de entrada del sensor de obstáculos IR como el pin digital 9.
void setup ()
{
pinMode (endStop, INPUT);
pinMode (irSensor, INPUT); En la configuración, declaramos los pines endStop e irSensor como entradas.
pinMode (stepPin, OUTPUT);
pinMode (dirPin, OUTPUT);
pinMode (enablePin, OUTPUT); Declaramos stepPin, dirPin y enablePin como salidas.
digitalWrite (enablePin, LOW); Configuramos enablePin LOW para habilitar el controlador DRV8825
while (digitalRead (endStop) ==LOW)
{ Siempre que el valor digital del interruptor de parada final sea BAJO (el interruptor no se está presionando).
digitalWrite (dirPin, HIGH); la dirección de rotación del motor se establece en sentido antihorario
for (int x =0; x <1; x ++)
{
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
} y el paso a paso rotará en sentido antihorario un paso a la vez hasta que la condición de la instrucción While sea falsa.
digitalWrite (enablePin, HIGH);
} Esto deshabilita nuestro controlador para que cuando no esté en uso el controlador no consuma mucha corriente.
void loop ()
{
if (digitalRead (irSensor) ==0)
{ En el bucle si el valor digital del irSensor es 0 (hay un obstáculo (mano) frente al sensor de obstáculos IR)
digitalWrite (enablePin, LOW); El controlador se habilita.
digitalWrite (dirPin, LOW); La dirección de rotación del motor se establece en el sentido de las agujas del reloj.
for (int x =0; x
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
} El paso a paso girará en el sentido de las agujas del reloj durante 6000 pasos.
retraso (2000); Esperará 2 segundos.
while (digitalRead (endStop) ==LOW)
{ Siempre que el valor digital del interruptor de parada final sea BAJO (el interruptor no se está presionando.
digitalWrite (dirPin, HIGH); la dirección de rotación del motor se establece en sentido antihorario.
for (int x =0; x <1; x ++)
{
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
}
} y el paso a paso rotará en sentido antihorario un paso a la vez hasta que la condición de la instrucción While sea falsa.
digitalWrite (enablePin, HIGH);
}
} Luego, el controlador se desactivará hasta que la condición de la declaración If sea verdadera y el código se reproduzca de nuevo.
Paso 10:Montaje
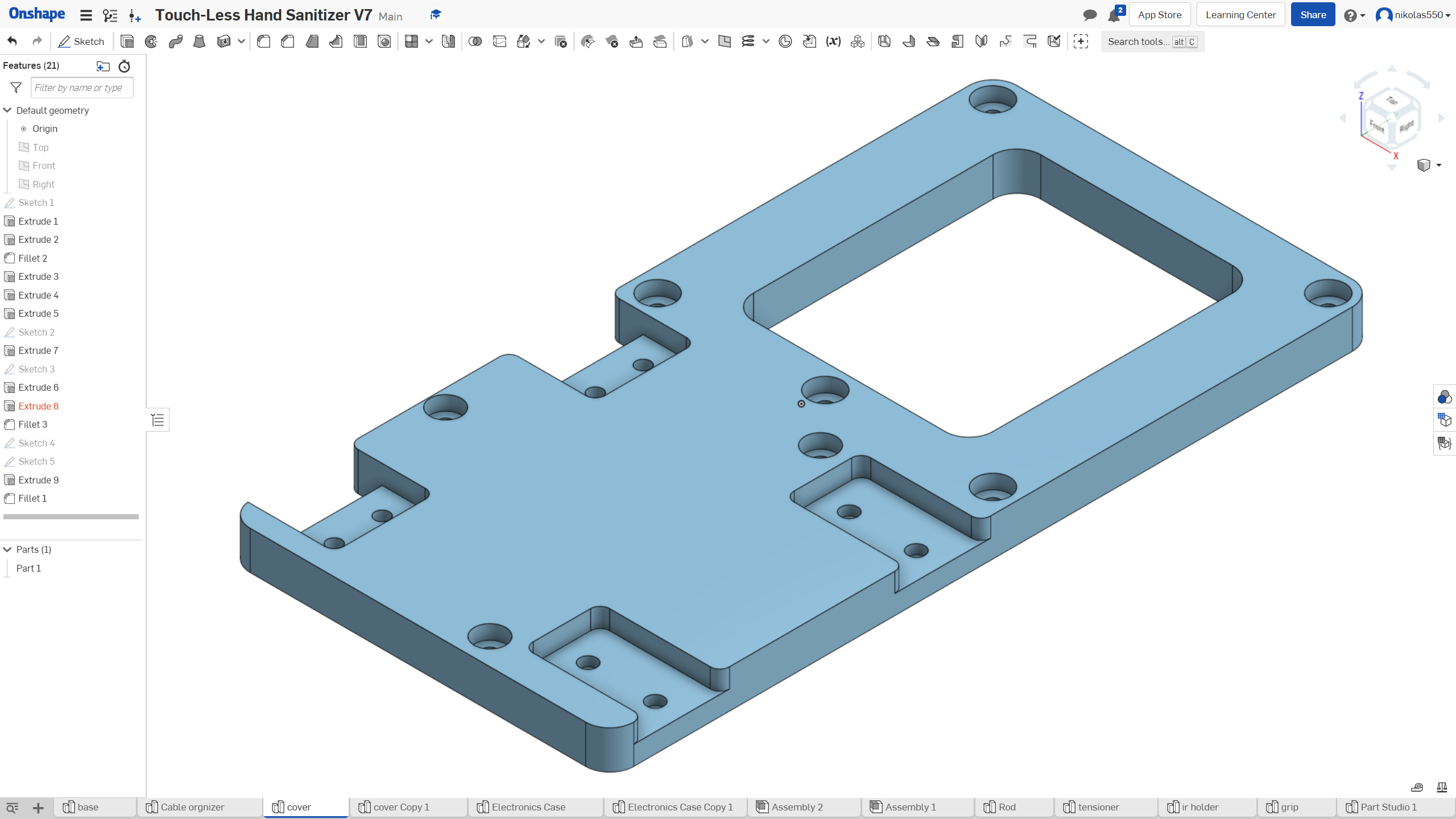
Ensamblaje de la cubierta


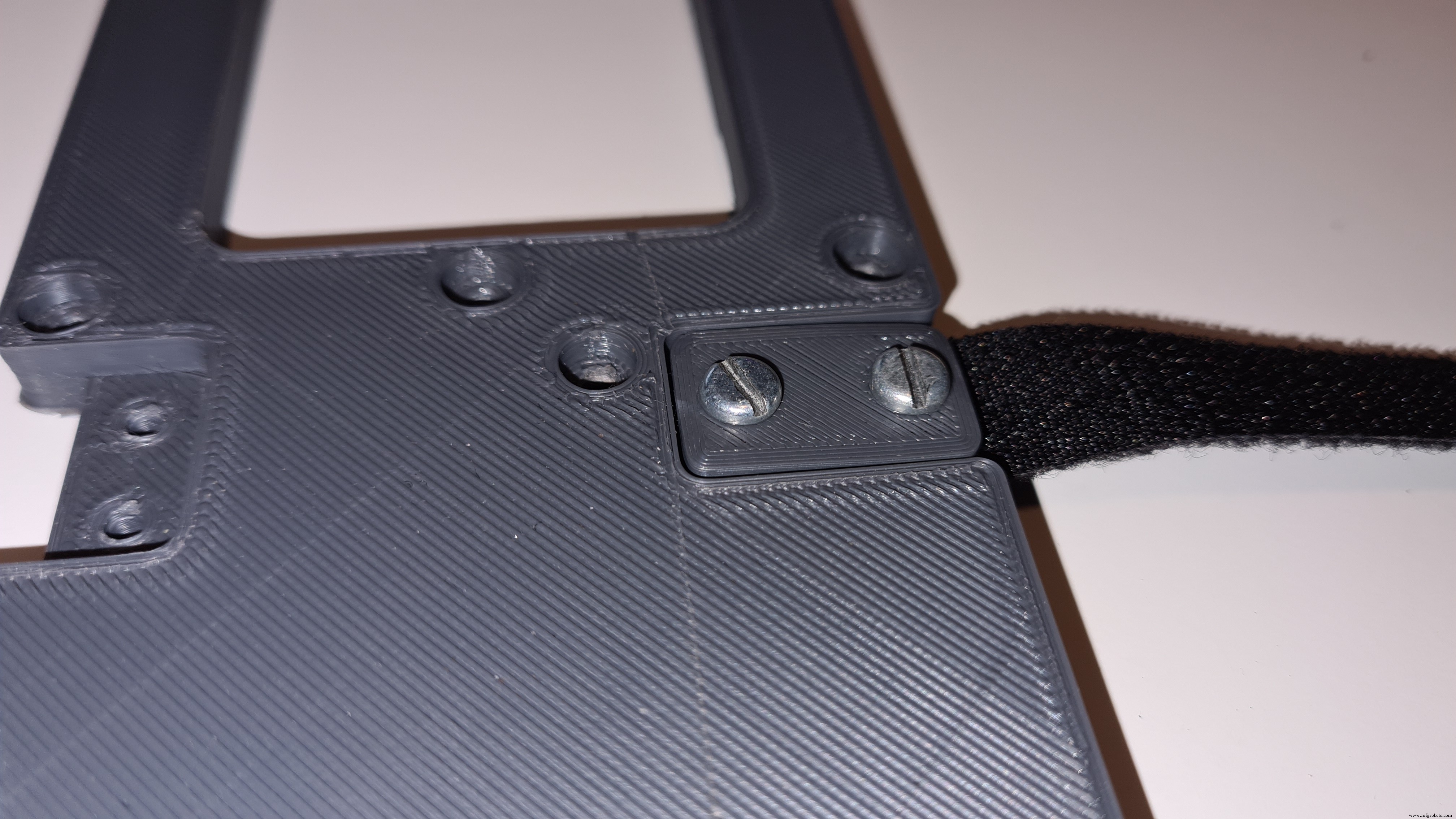

Simplemente coloque la brida de Velcro en el espacio, agregue encima el soporte y atorníllelos juntos.
x2


Atornille la empuñadura de Velcro a la funda. ¡El ensamblaje de la cubierta ya está completo!
x2
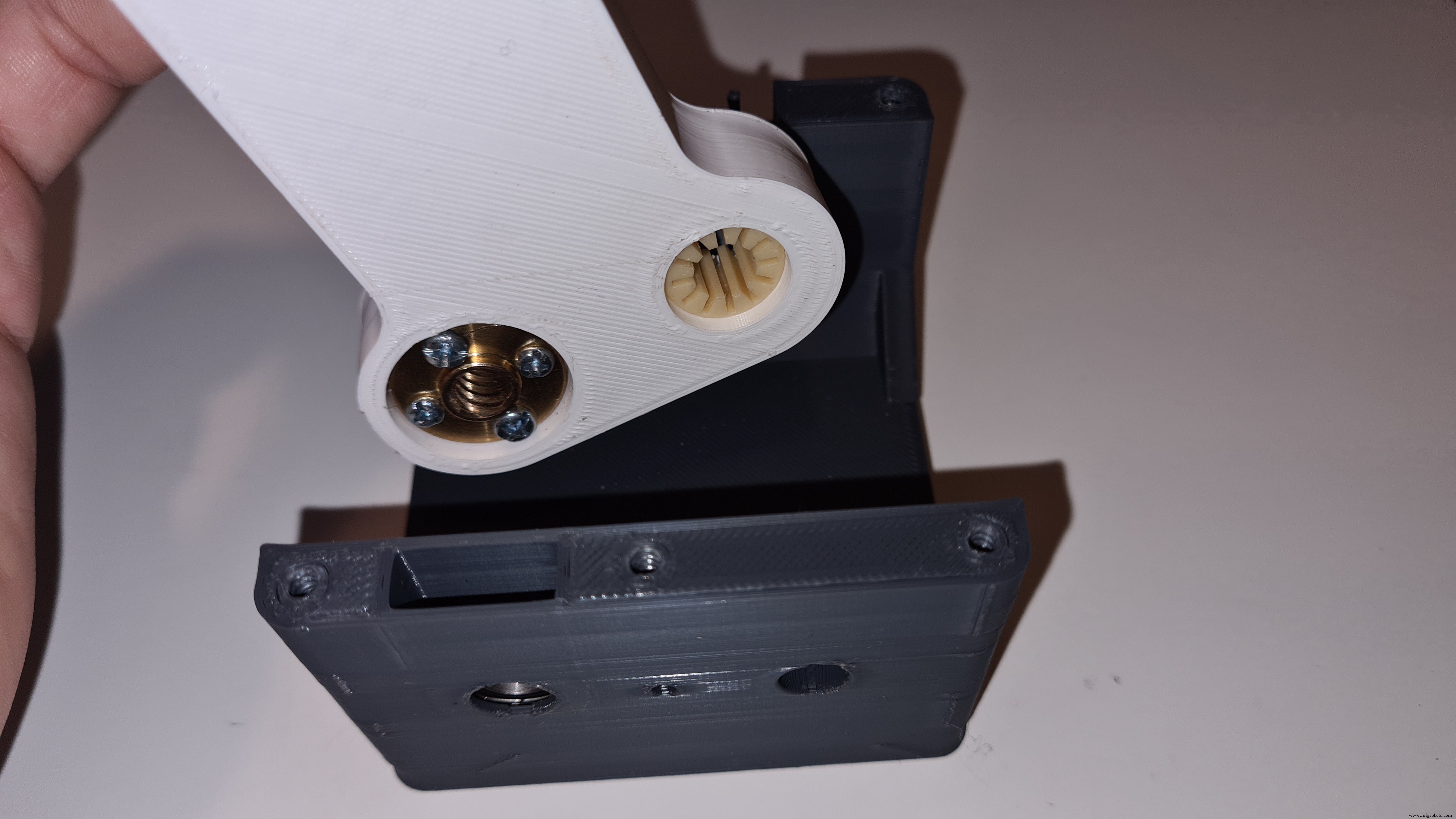
Ensamblaje de prensatelas

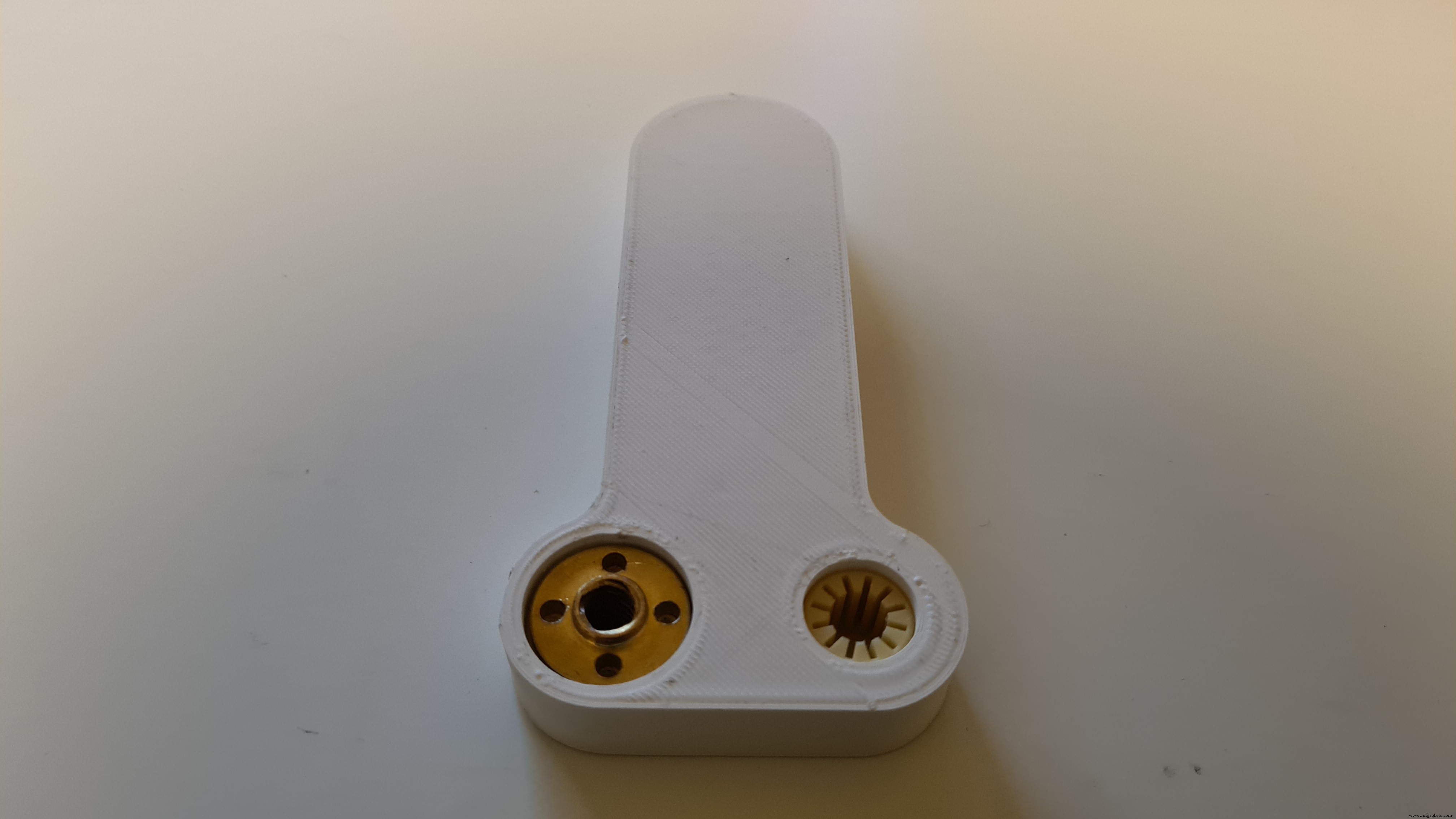

Empuje el cojinete lineal en el orificio derecho hasta que esté en el medio. Atornille la tuerca T8 al orificio izquierdo del prensatelas con 4 tornillos.
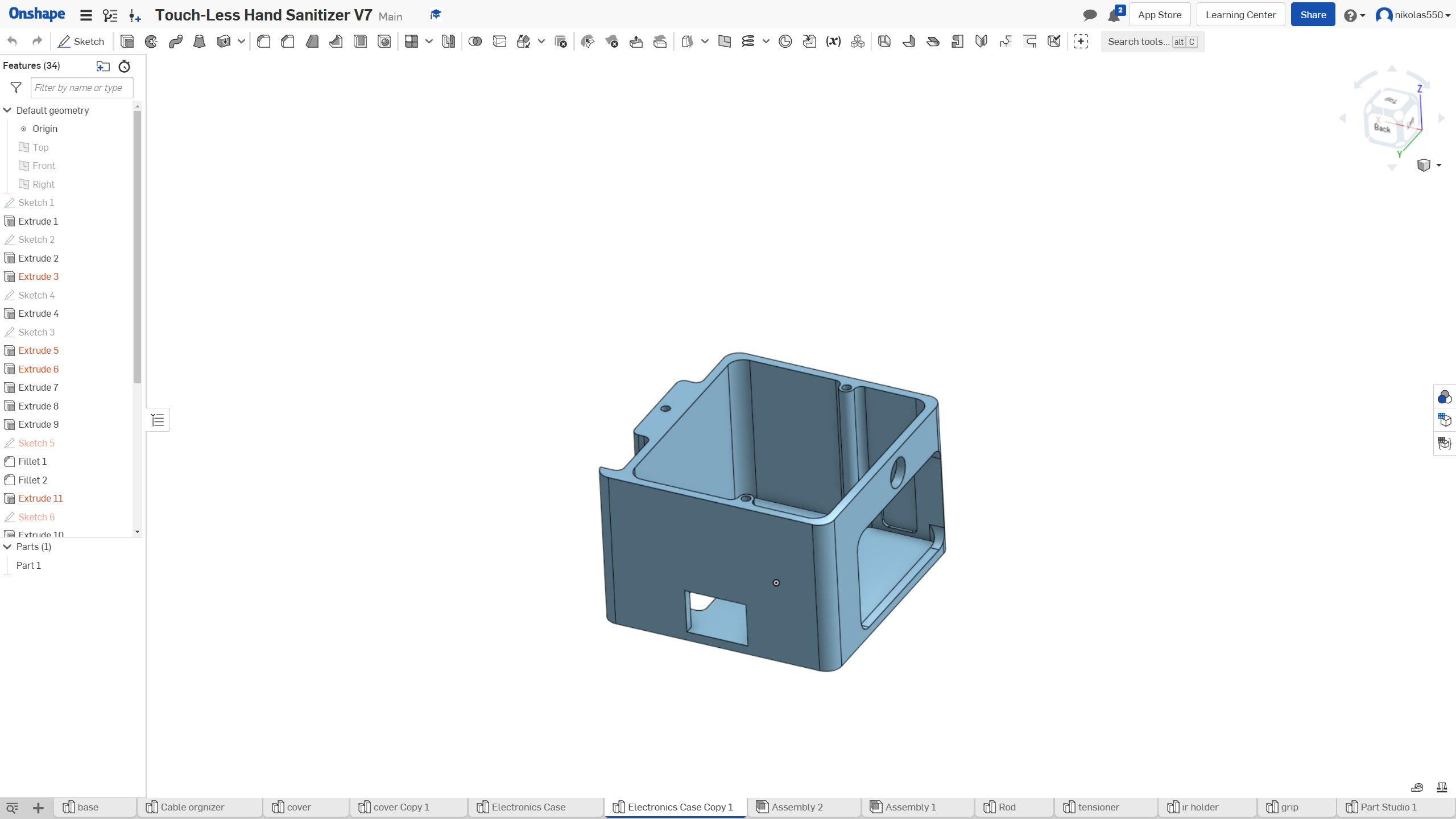
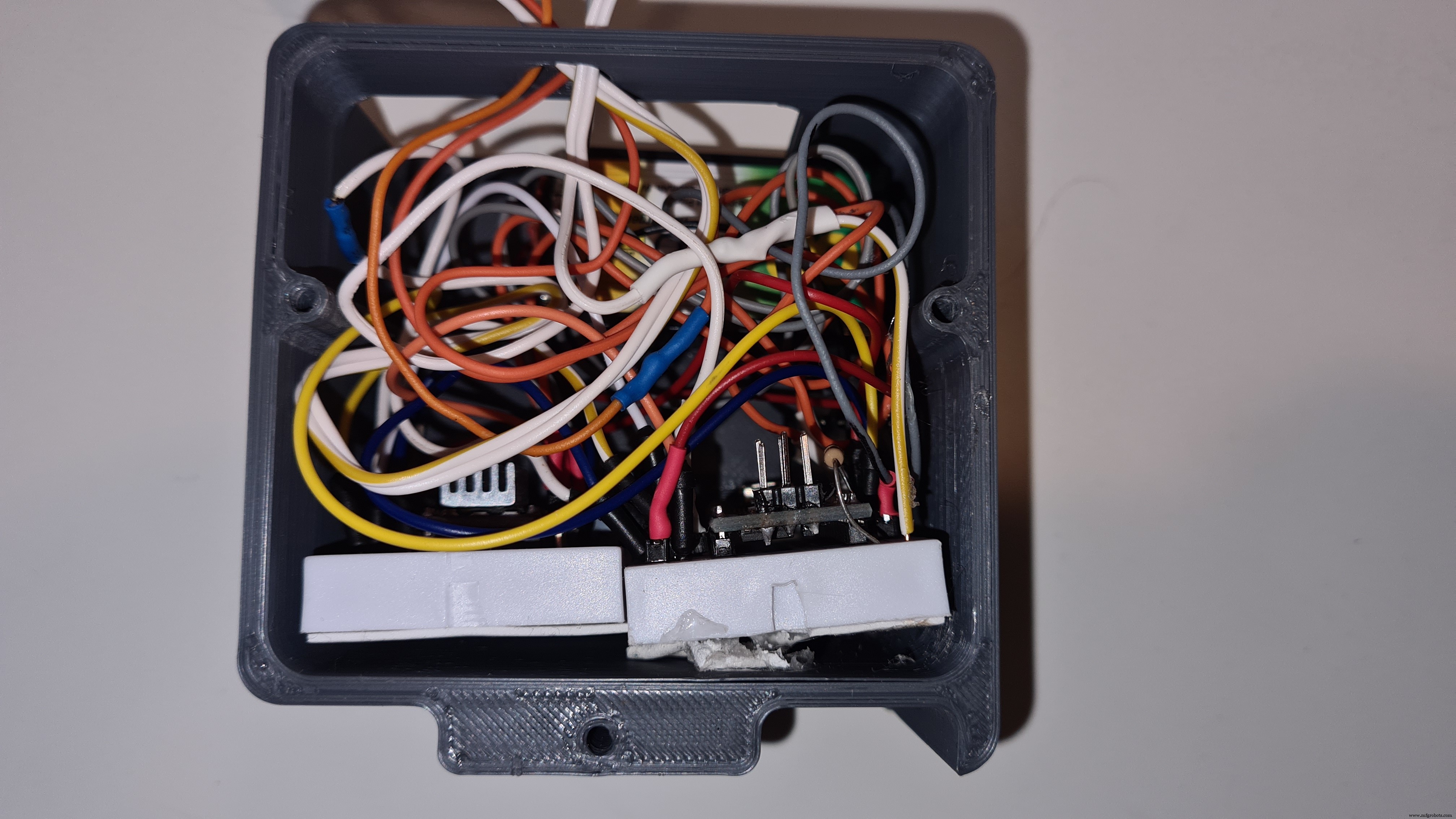
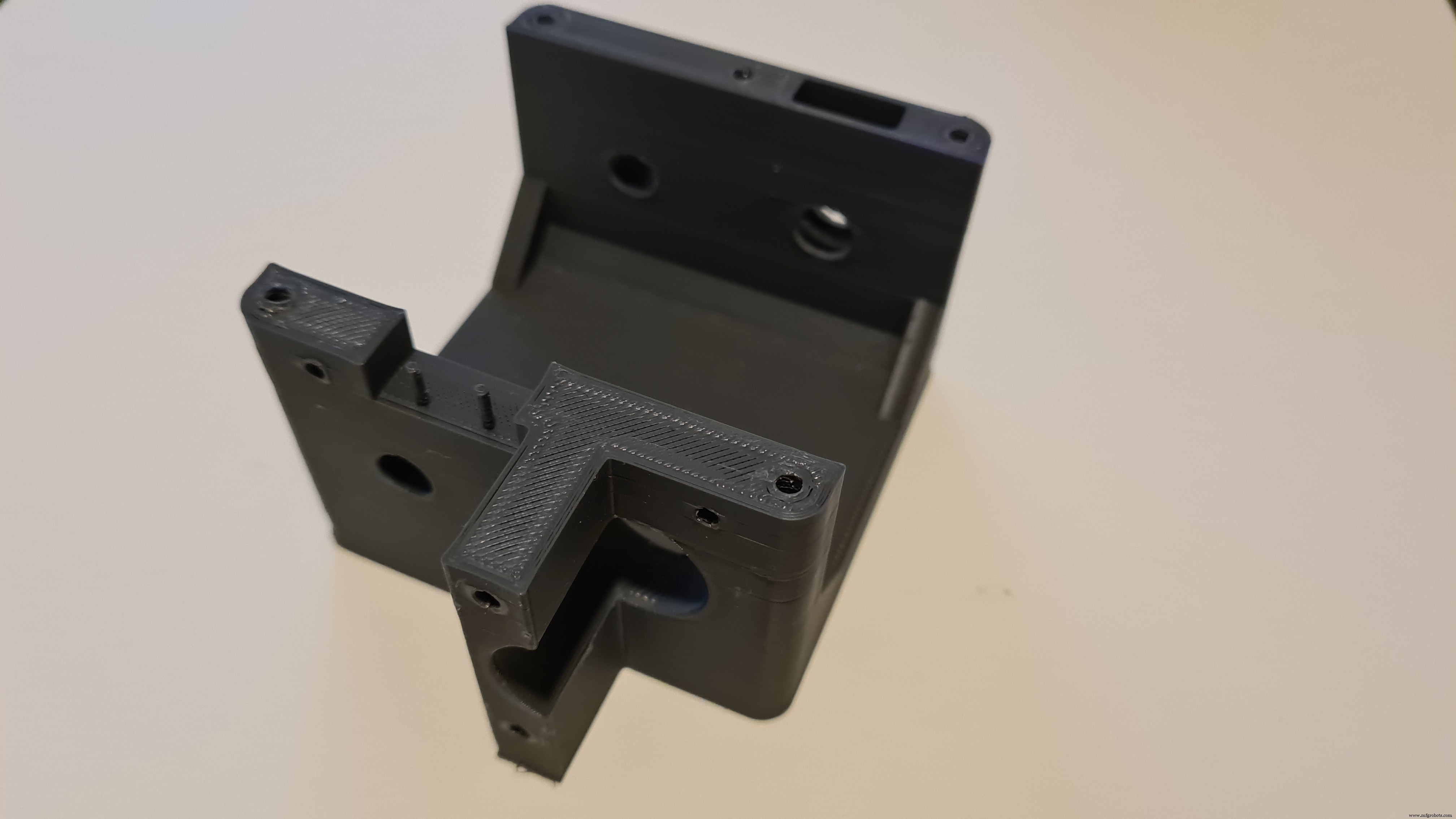
Ensamblaje de caja de electrónica
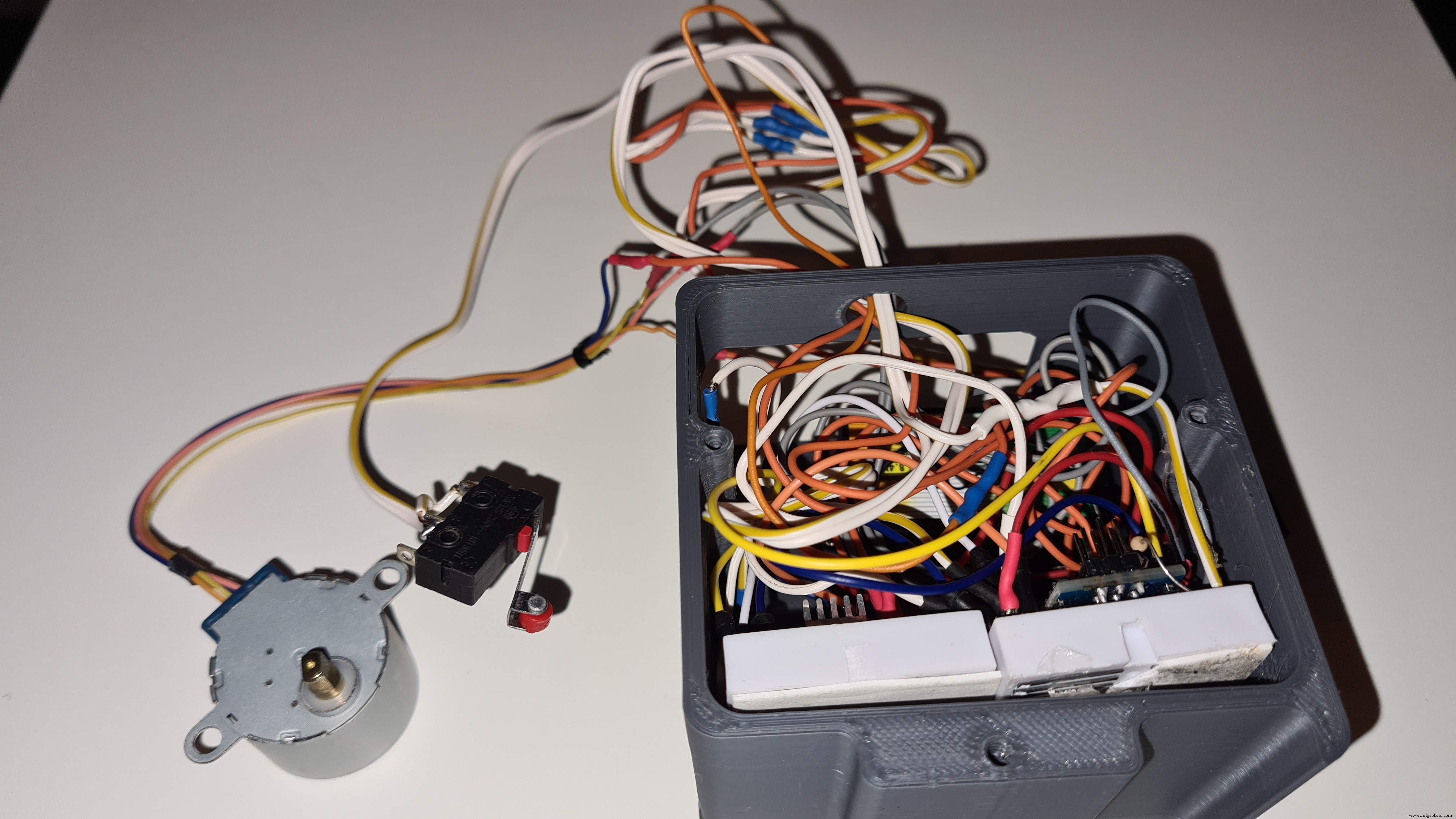
Pon tu circuito en la caja de la electrónica. Pase los cables del paso a paso, el interruptor y el sensor de obstáculos IR a través del orificio.
Conjunto de soporte del sensor de obstáculos por infrarrojos
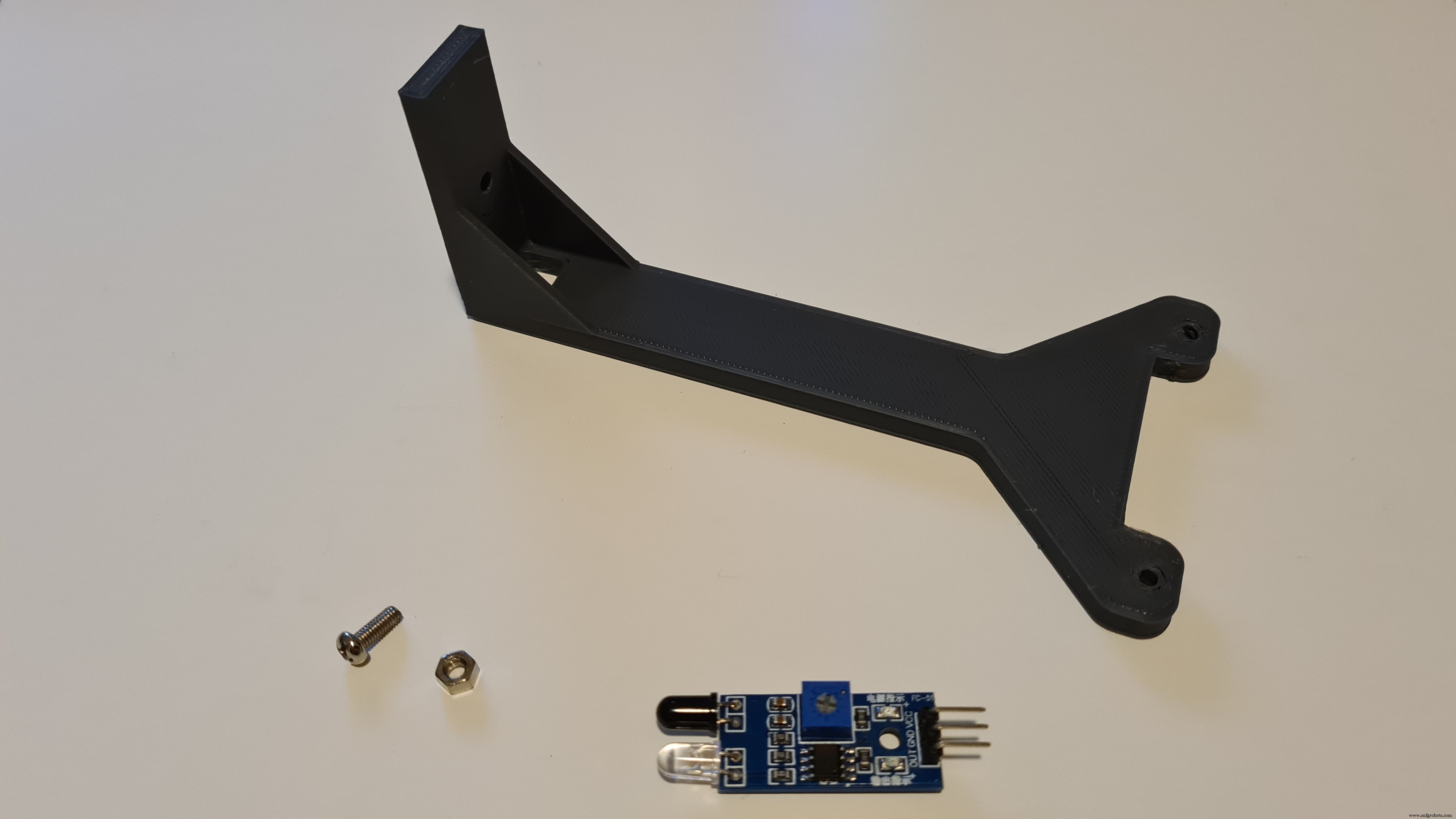
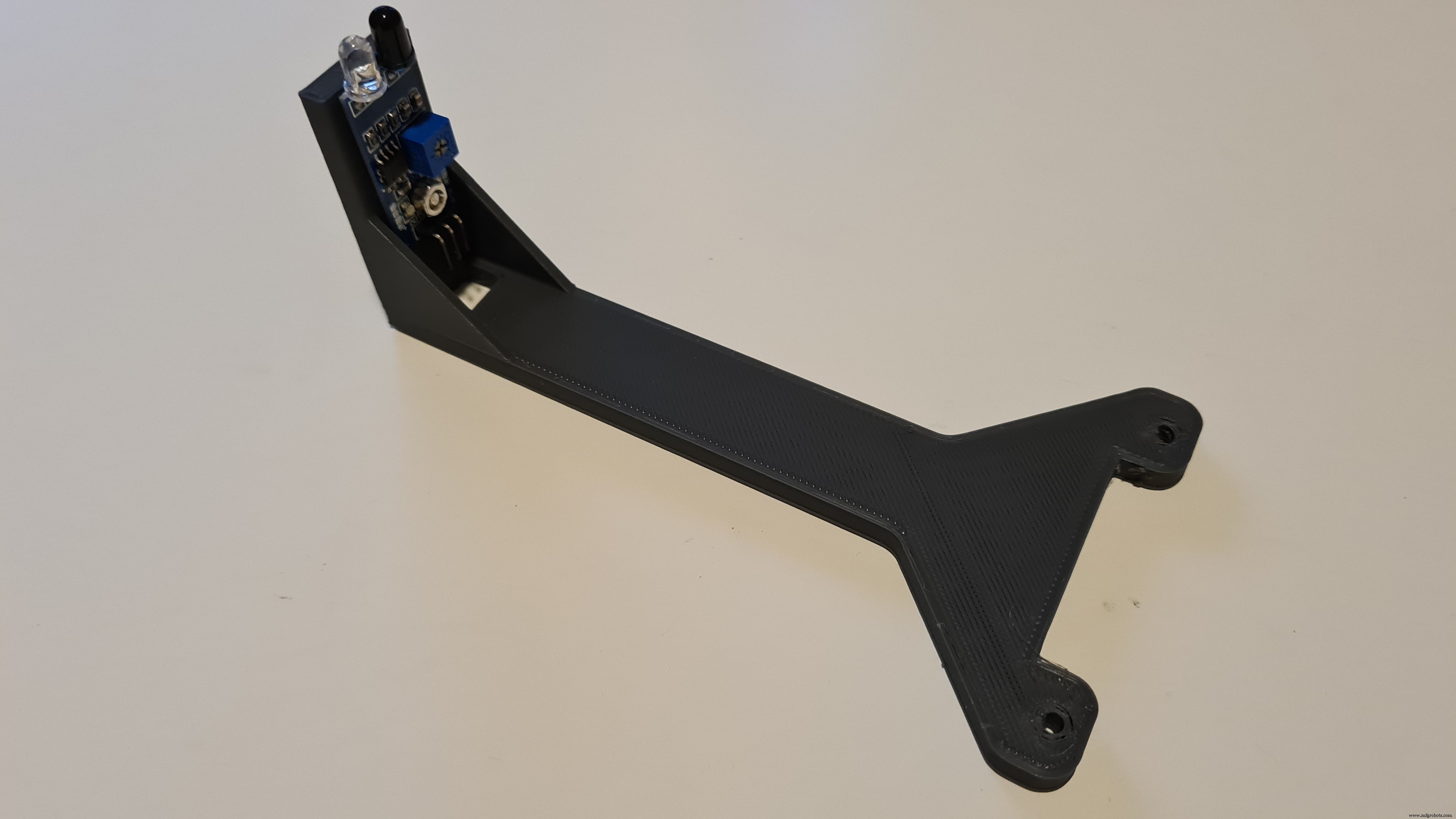
Atornille el sensor de obstáculos de infrarrojos al orificio y use una tuerca para apretar el encaje y ajustar la posición.
¡Montaje final!
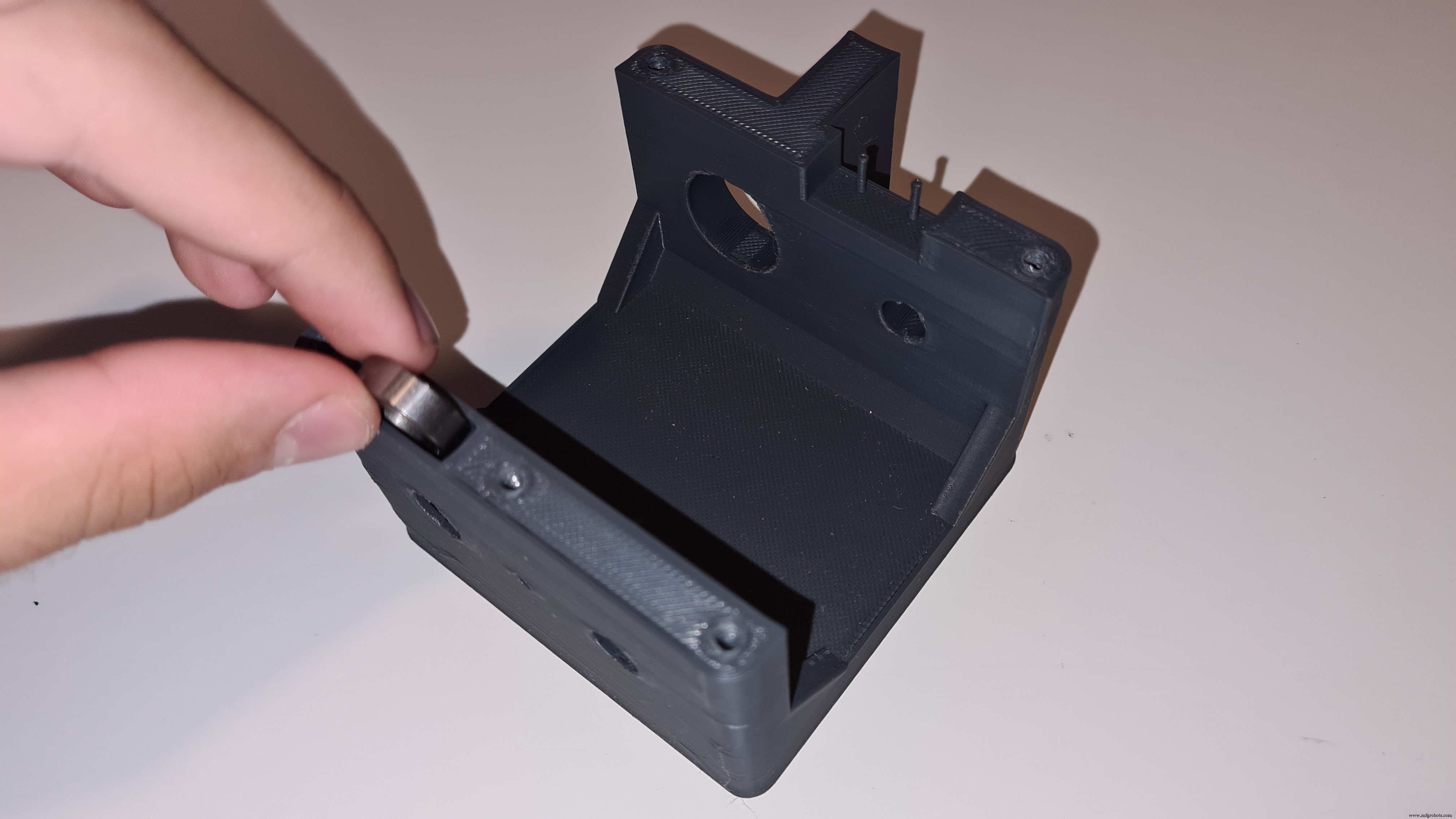
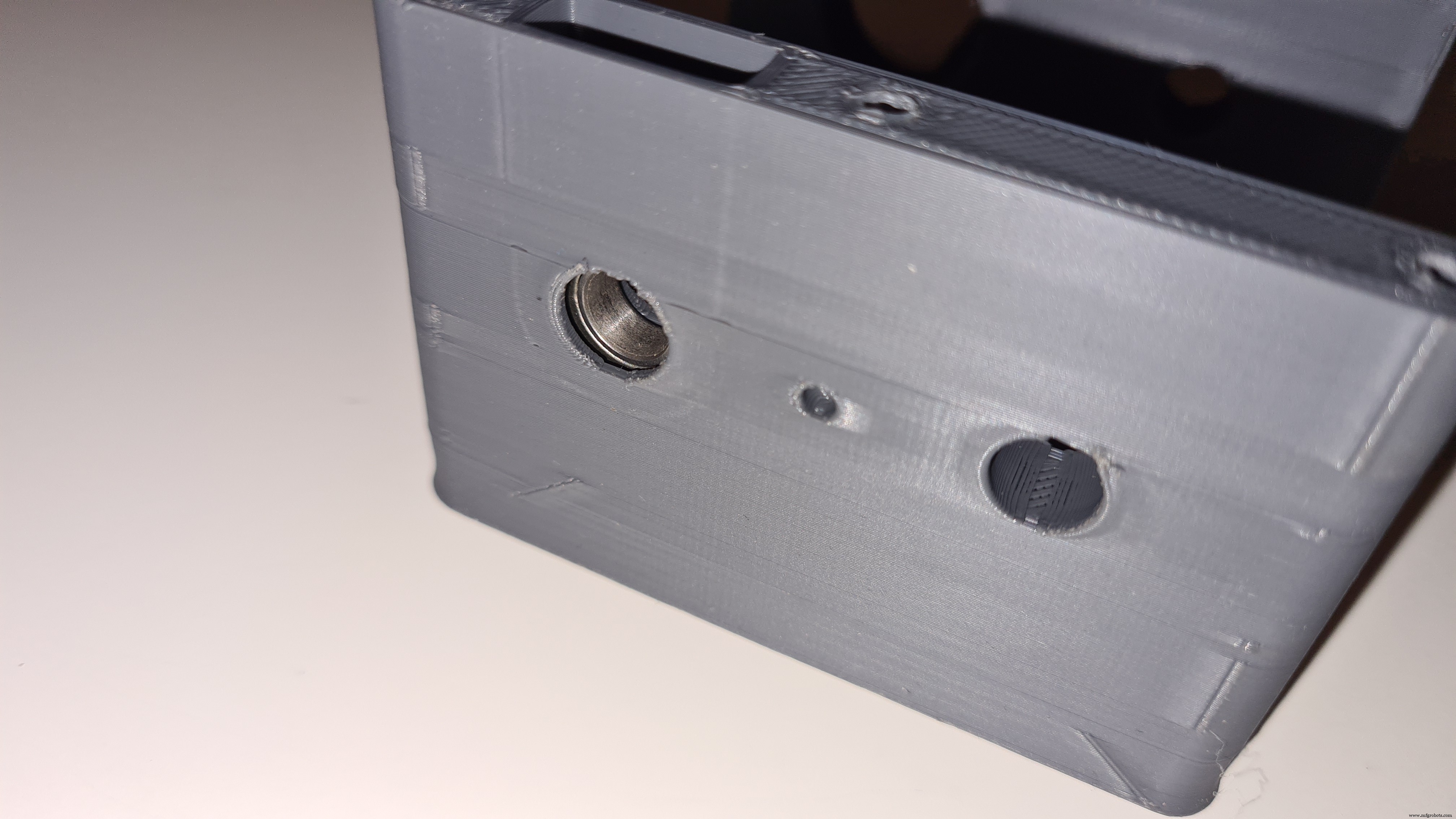
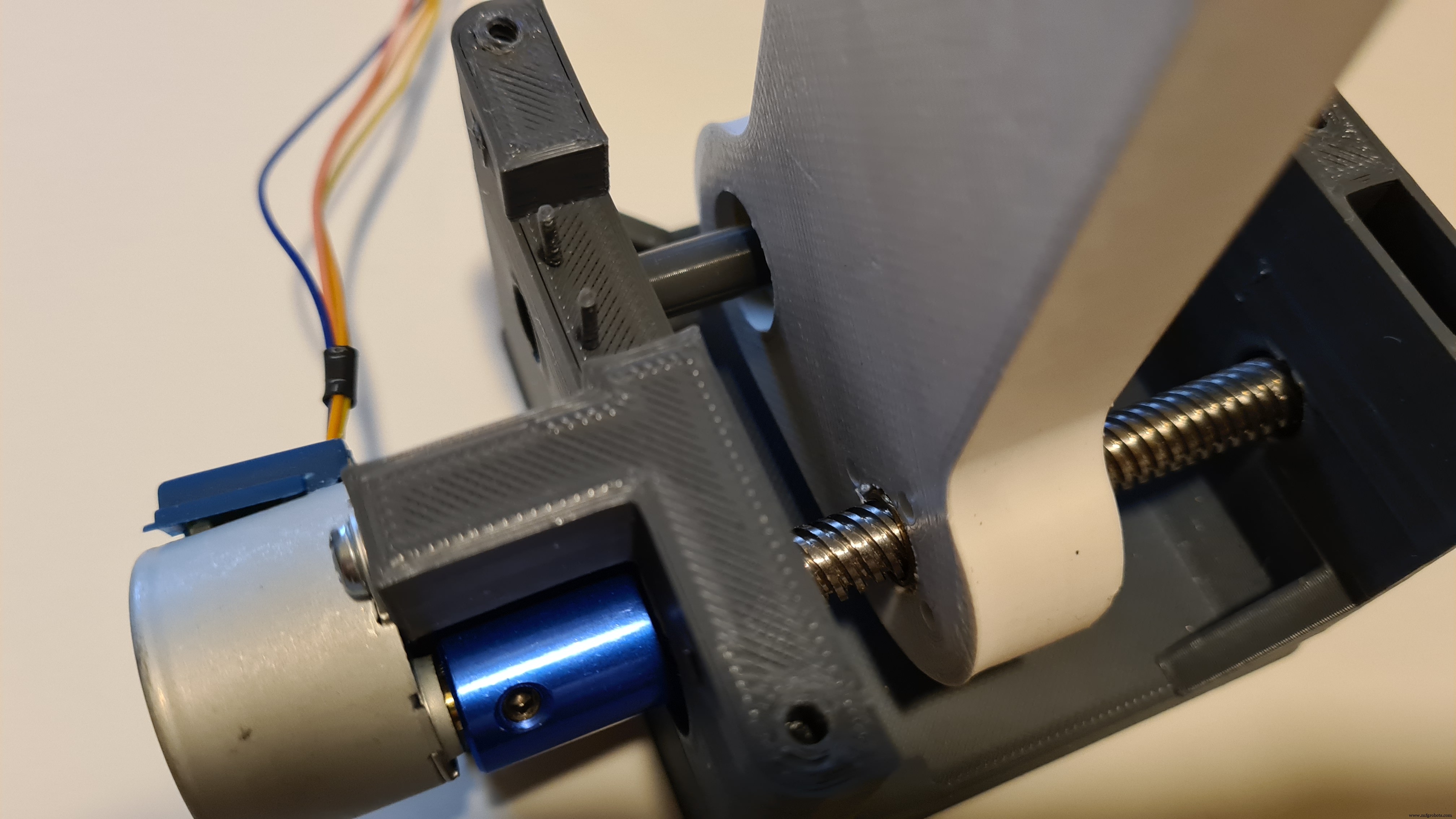
Inserte el rodamiento.

Agrega el tornillo T8 y el conjunto de prensatelas (el tornillo T8 debe tener una longitud de 70 mm a 82 mm ). . Si tiene un tornillo más largo, debe cortarlo al tamaño deseado con una herramienta como una sierra para metales. De lo contrario, puede probar con la impresión 3D.)

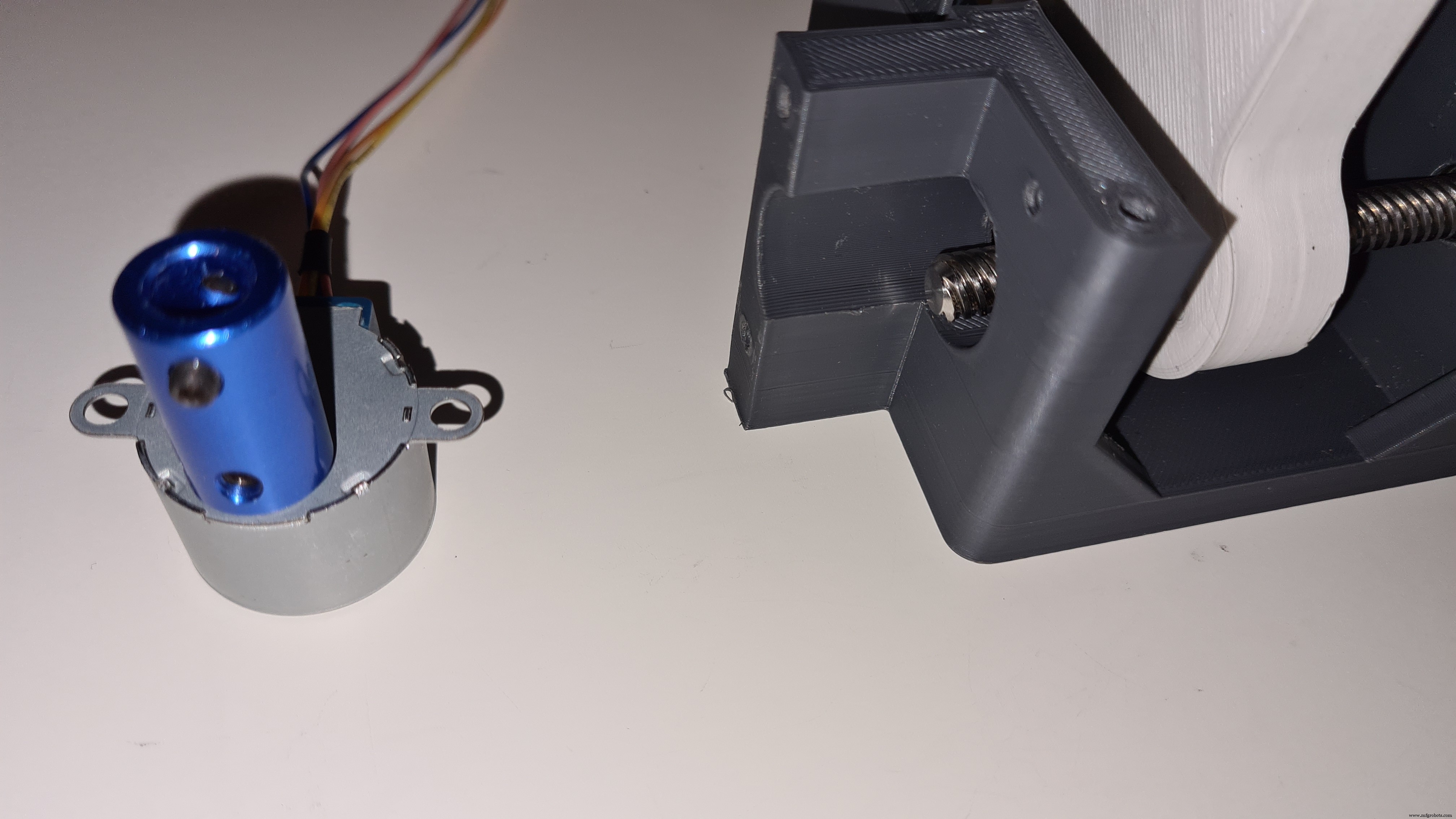
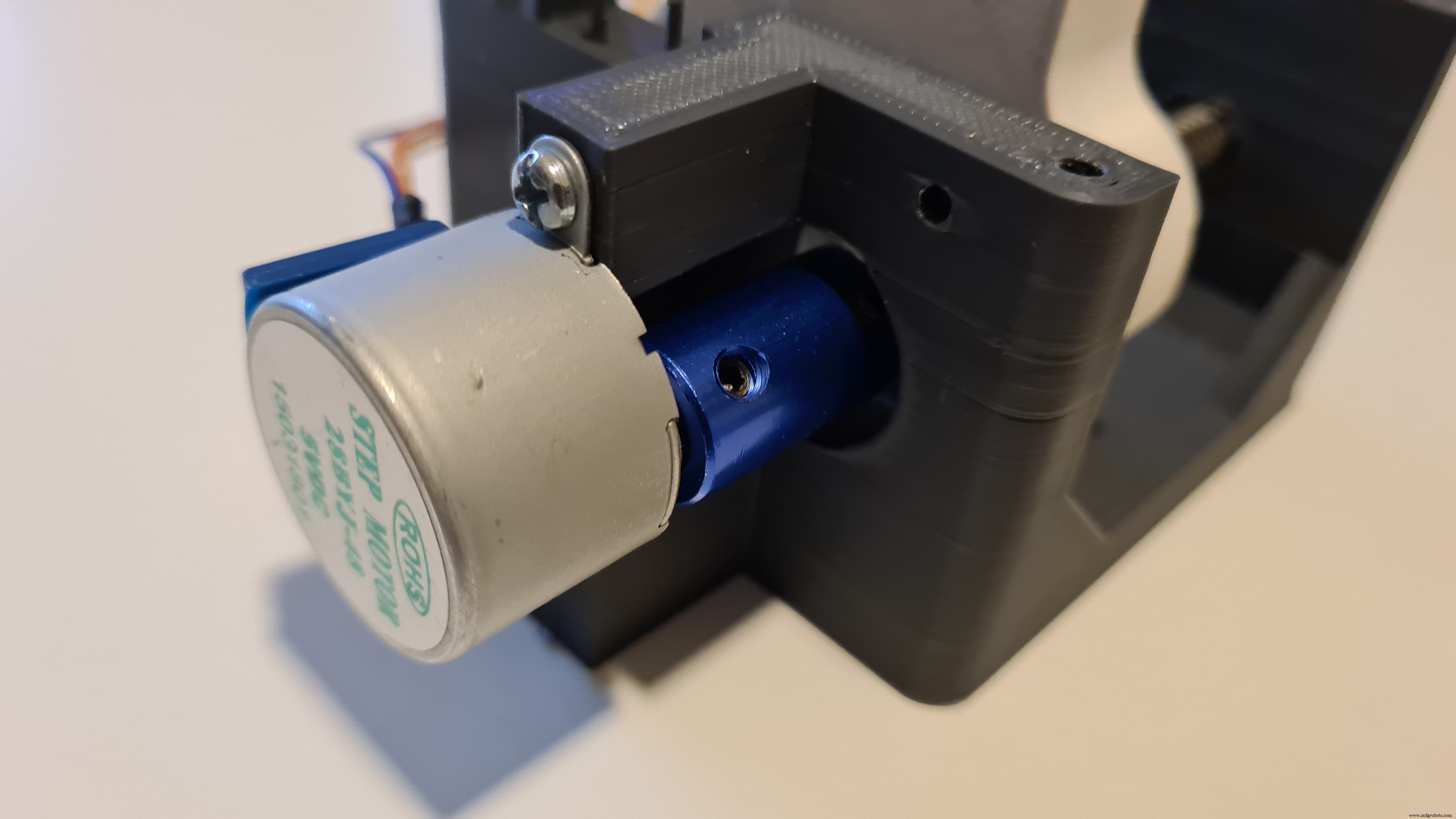
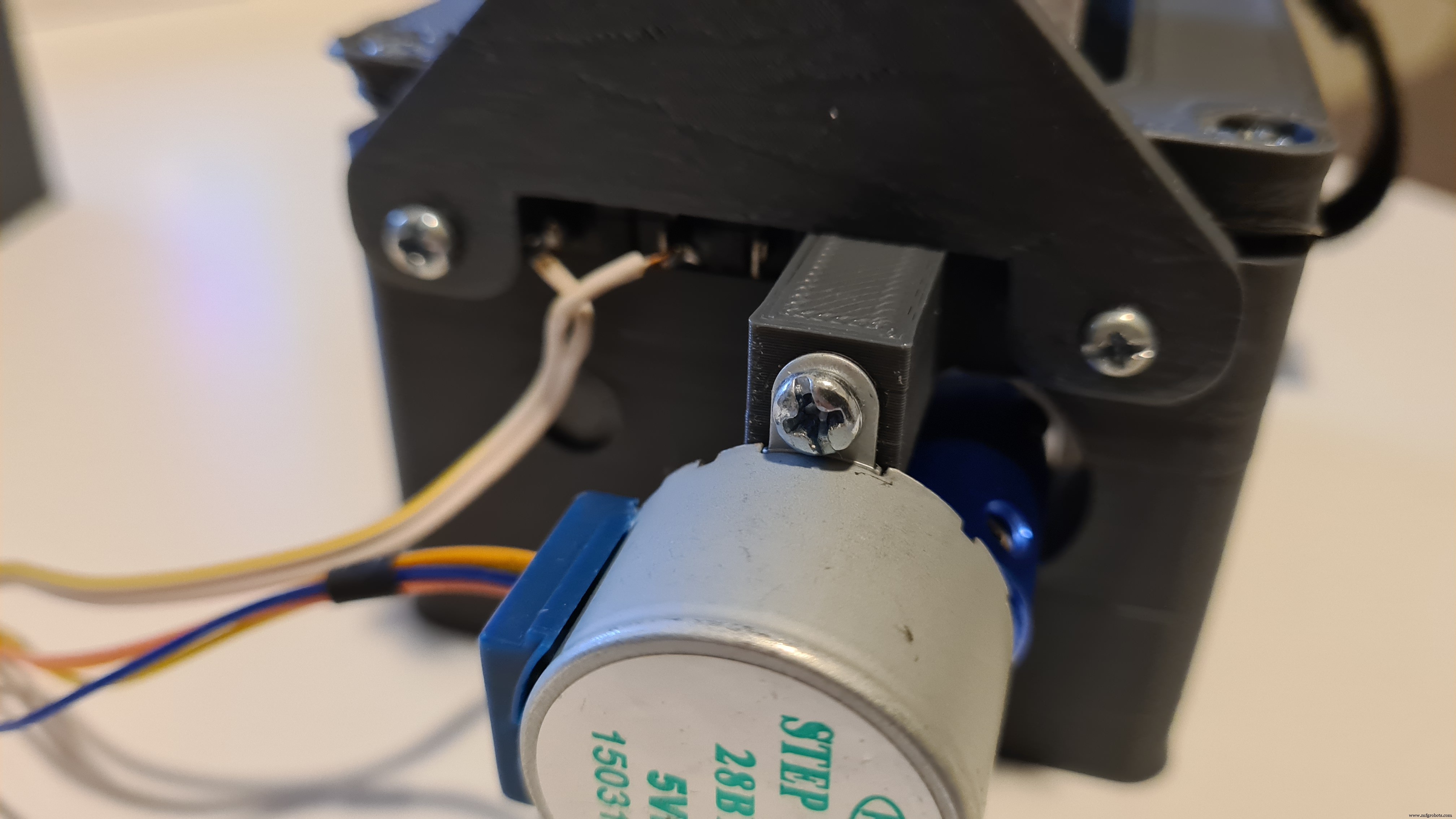
Apriete el acoplador al eje del motor. Luego apriételo al tornillo T8. Por último, atornille el motor a la base con dos tornillos.
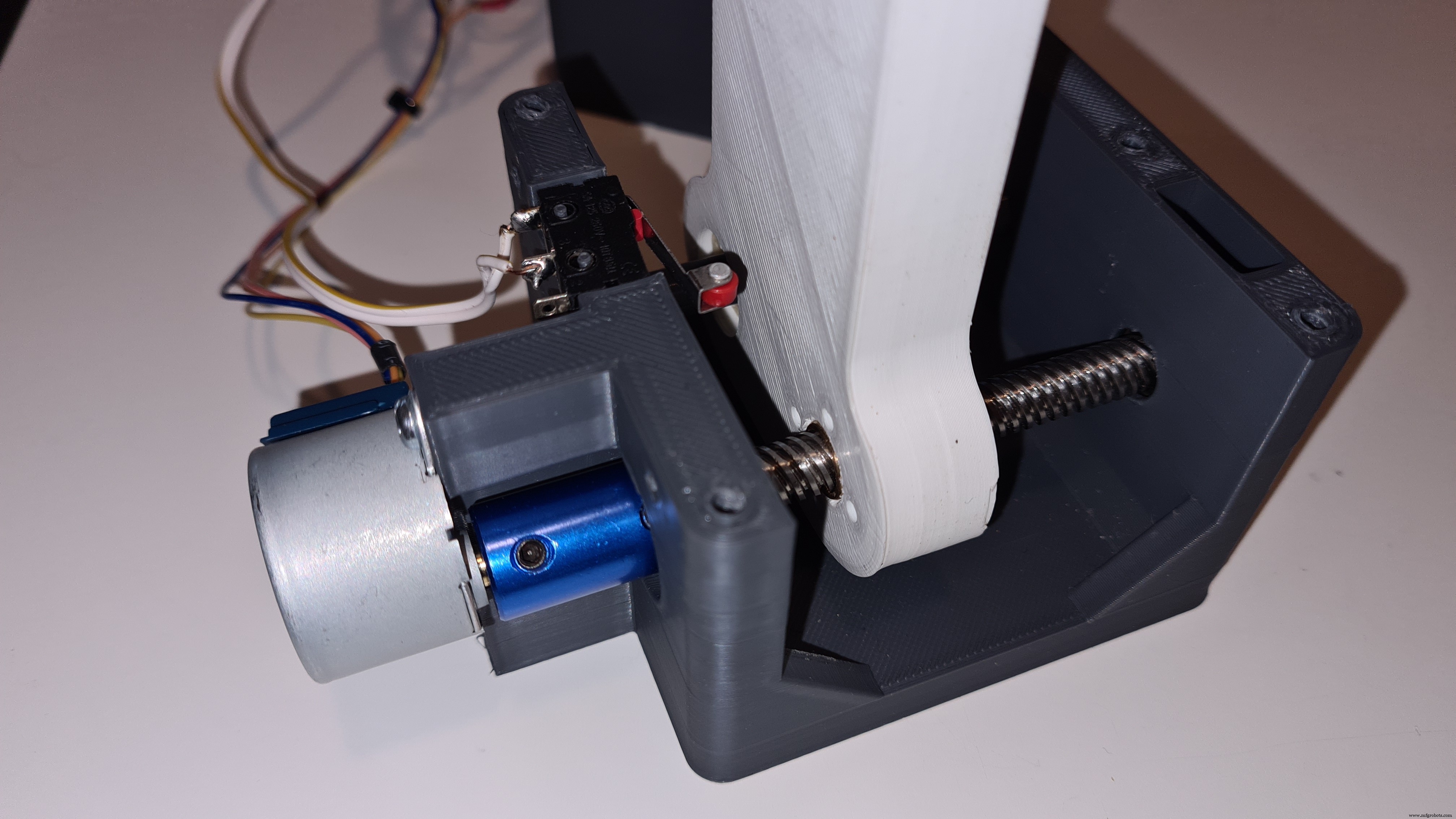
Agregue el interruptor de fin de carrera.
Atornille la cubierta a la base con 5 tornillos.


Atornille el soporte del sensor de obstáculos IR al frente de la base con 2 tornillos.
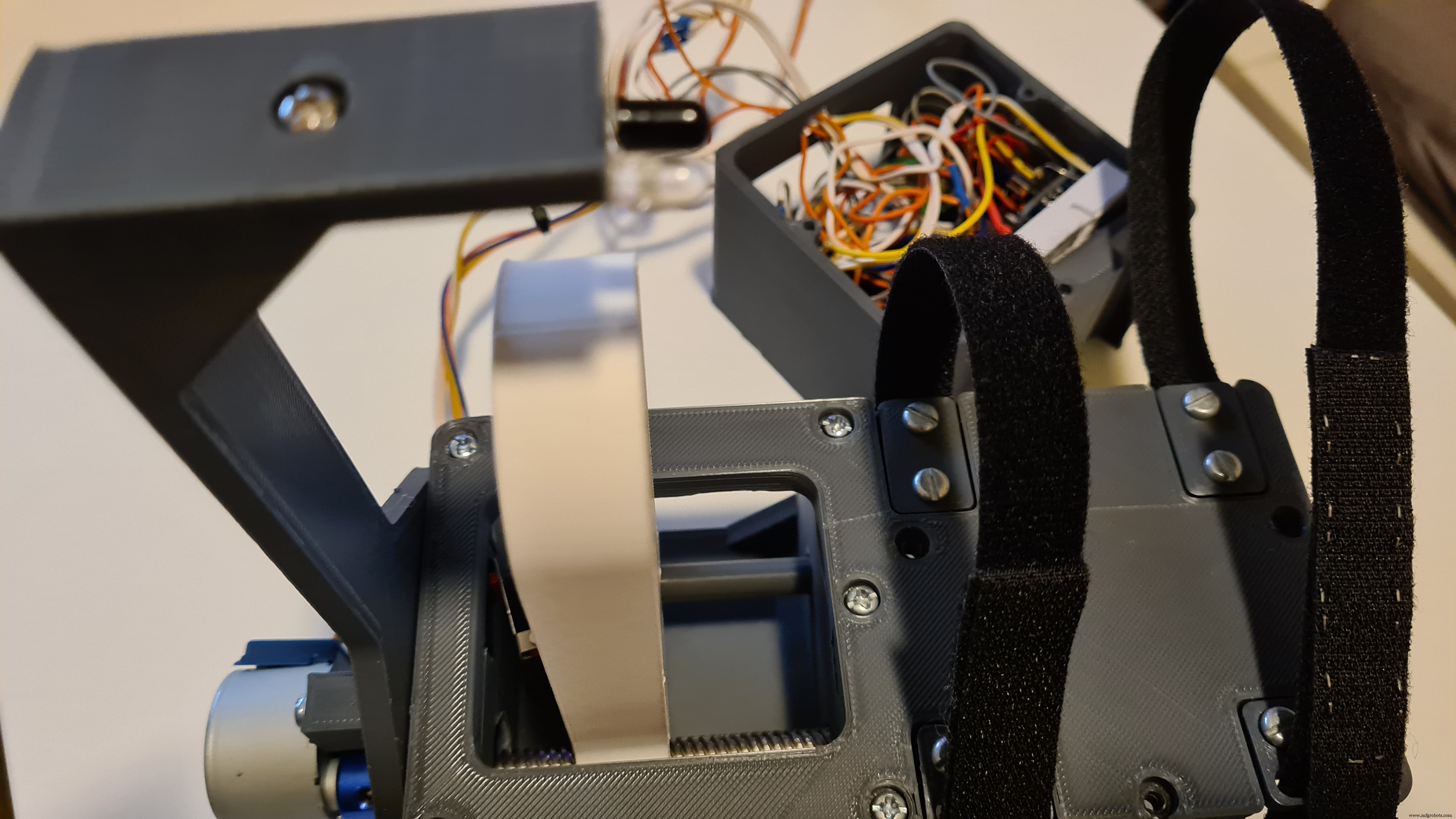
Finalmente, atornille la caja de la electrónica a la cubierta con 3 tornillos. ¡Bien hecho, el proyecto está terminado!
Conclusión

¡Este proyecto de un accesorio que puede convertir la mayoría de los dispensadores de desinfectante para manos / jabón en completamente automáticos y manos libres finalmente está terminado!
¡¡Gracias por tu tiempo !!
Código
- Automatic_Hand_Sanitizer_Transformer.code
Automatic_Hand_Sanitizer_Transformer.code Arduino
El código del dispositivo // Definir las conexiones de los pines y los pasos del motor por revoluciónconst int dirPin =2; // definimos el pin de directorio del driverconst int stepPin =3; // definimos el pin de paso del driverconst int enablePin =4; // definimos el pin de habilitación del driverconst int stepsPerRevolution =6000; // una rotación completa (360 grados) es de 2048 pasosint endStop =8; // definimos el pin de entrada del interruptor del final de carreraint irSensor =9; // definimos el pin de entrada del sensor de obstáculos IR configuración del vacío () {pinMode (endStop , INPUT); // Declarar pines como entradas pinMode (irSensor, INPUT); pinMode (stepPin, OUTPUT); // Declarar pines como salidas pinMode (dirPin, OUTPUT); pinMode (enablePin, SALIDA); digitalWrite (enablePin, LOW); // Esto habilita a nuestro conductor while (digitalRead (endStop) ==LOW) // Cuando el código comienza, el paso a paso girará hasta que el interruptor de parada final {// se active el interruptor de parada digitalWrite (dirPin, HIGH ); // las direcciones se establecen en sentido antihorario // Girar el motor lentamente para (int x =0; x <1; x ++) {digitalWrite (stepPin, HIGH); delayMicroseconds (2000); digitalWrite (stepPin, LOW); delayMicroseconds (2000); }} digitalWrite (enablePin, HIGH); // Esto deshabilita nuestro controlador para que cuando no // esté en uso el controlador no consuma corriente} void loop () {if (digitalRead (irSensor) ==0) // Si hay un obstáculo (mano) delante del sensor de obstáculos IR {digitalWrite (enablePin, LOW); // Activamos el driverdigitalWrite (dirPin, LOW); // la dirección se establece en el sentido de las agujas del reloj // Gire el motor lentamente durante (int x =0; x Piezas y carcasas personalizadas
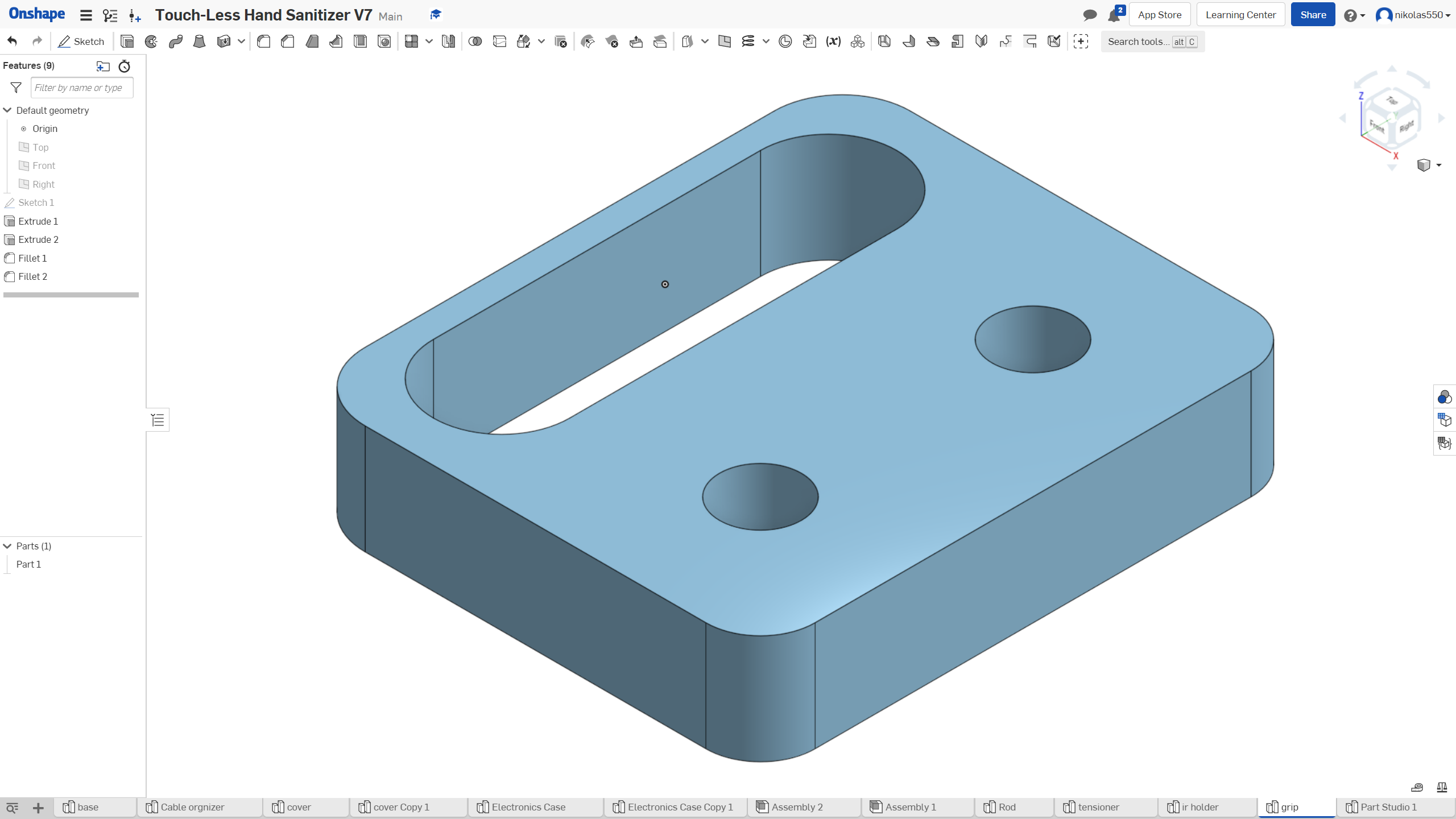
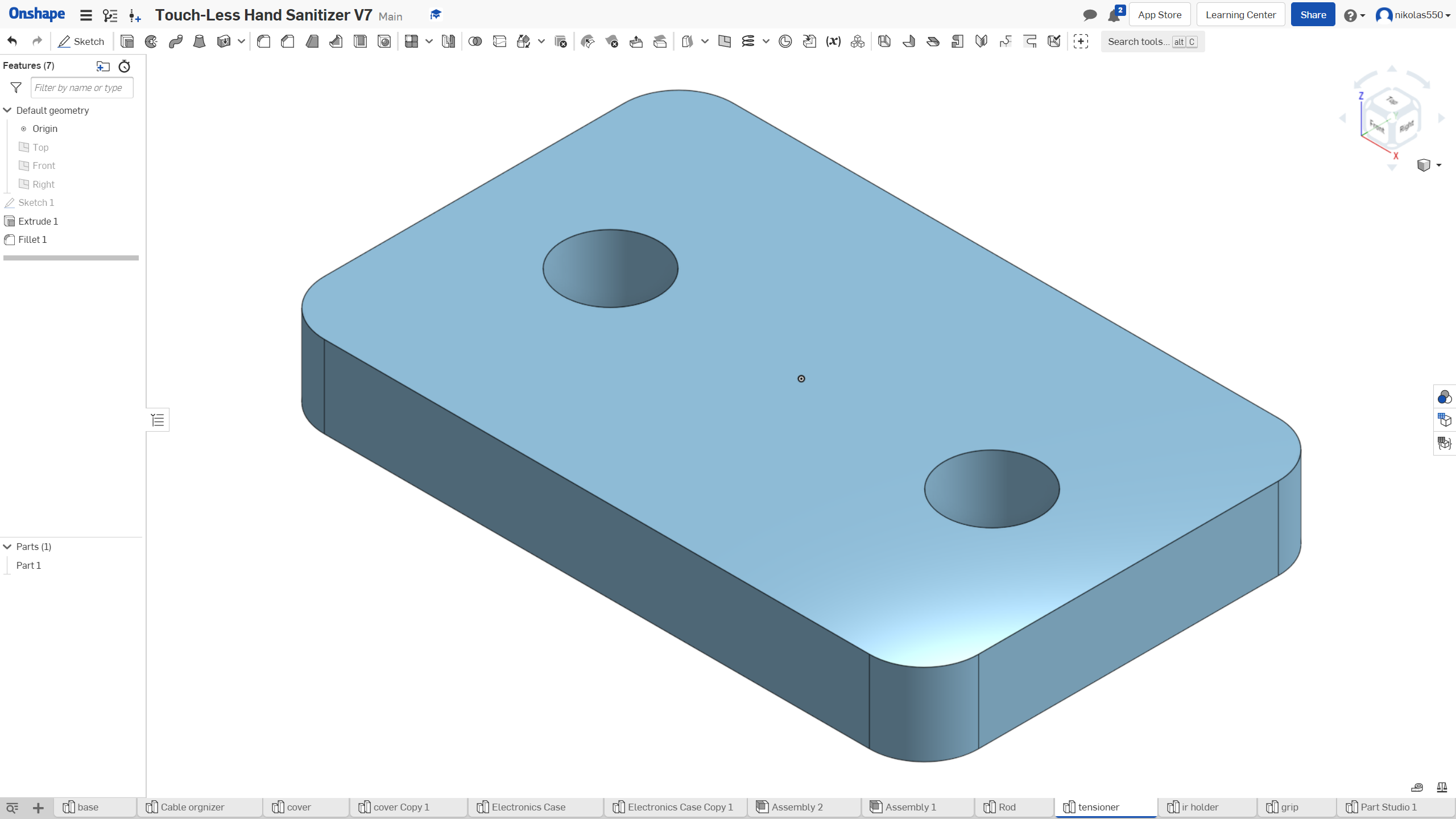
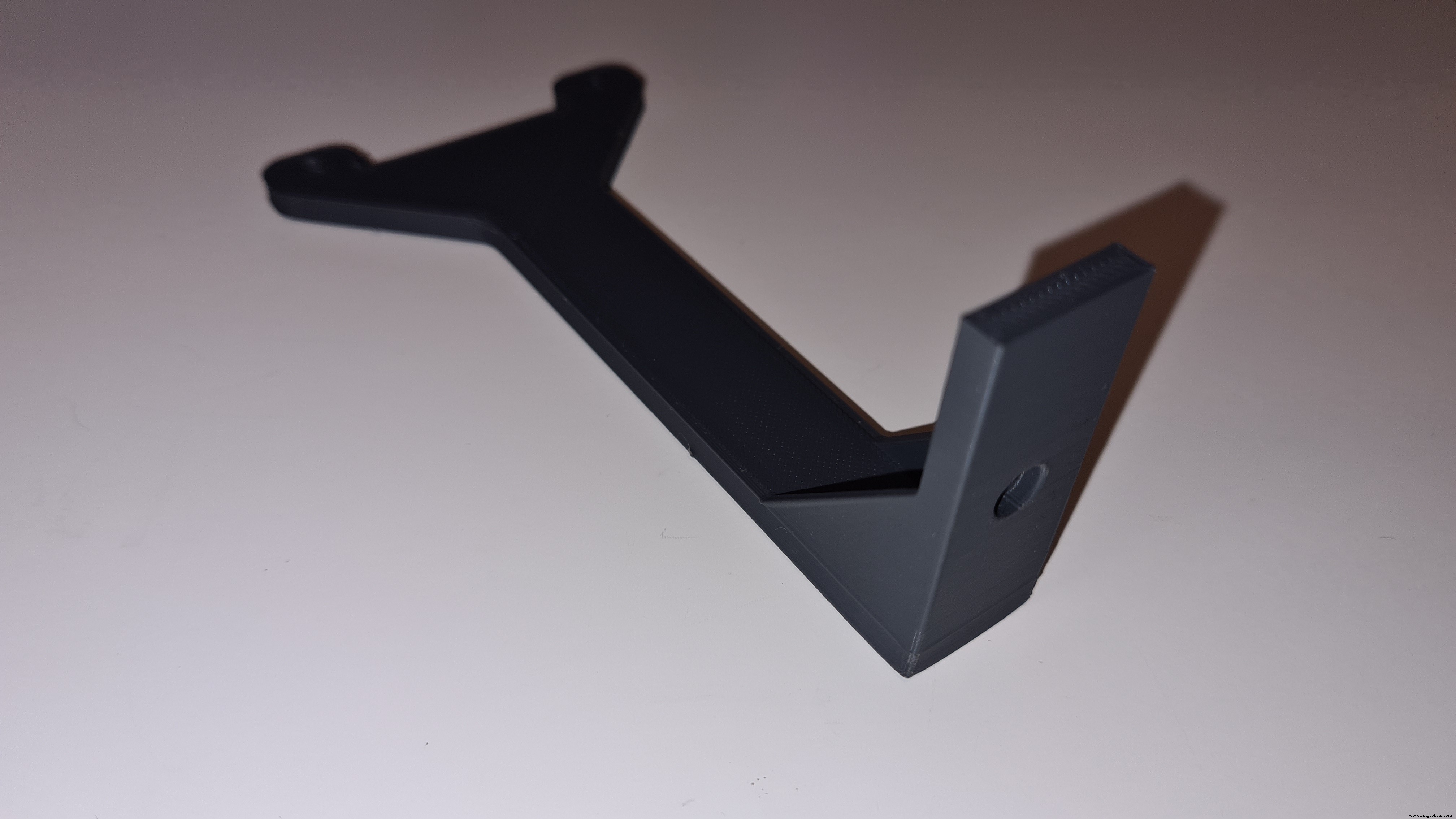
La base principal del dispositivo.Este es el componente que realmente presiona el dispensador.La tapa del dispositivo.Actúa como una caja para la electrónica.Crea el mecanismo de cierre de velcro.
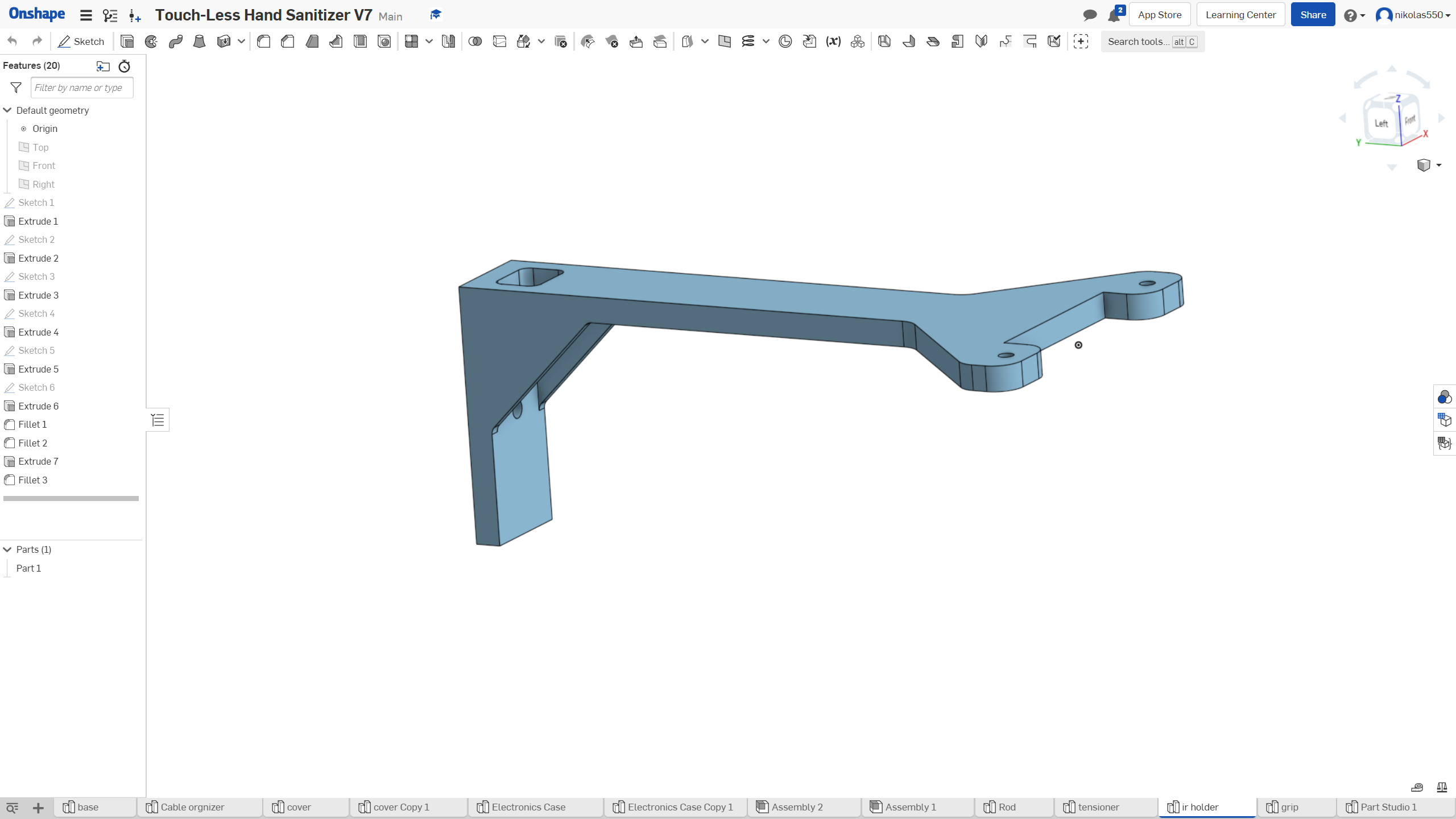
Necesitarás dos de estos. Actúa como soporte para la parte del prensatelas. Se conecta a la base y actúa como soporte para el sensor de infrarrojos. Sujeta los Velcros en la tapa.
Necesitará 2 de estos. Esquemas
Proceso de manufactura