


Navegador con barra ciega
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
| |||
|
Acerca de este proyecto
La historia comienza cuando vi a personas ciegas que intentaban caminar con dificultad y atravesaban obstáculos como agujeros en la carretera, escaleras, etc. con su tradicional bastón para ciegos. Realmente me impulsó a intentar construir este prototipo aunque no soy lo suficientemente experto en el manejo de dispositivos electrónicos. Utilizando diferentes tipos de fuentes en Internet, logré completarlo el año pasado durante mi proyecto de último año. Además de eso, también realizo el prototipo agregando ubicación GPS. Gracias a 1Sheeld, realmente me ayuda a terminar este prototipo en 6 meses.
Paso 1
Para encender el Blind Stick Navigator, debe utilizar una fuente de alimentación externa. Estoy usando una batería de 9v como introducción sobre cómo se apaga. Por lo que había visto, mi prototipo tenía la desventaja de proporcionar un uso de energía a largo plazo. Por lo tanto, necesita una mejora como panel solar / energía de alguna manera.
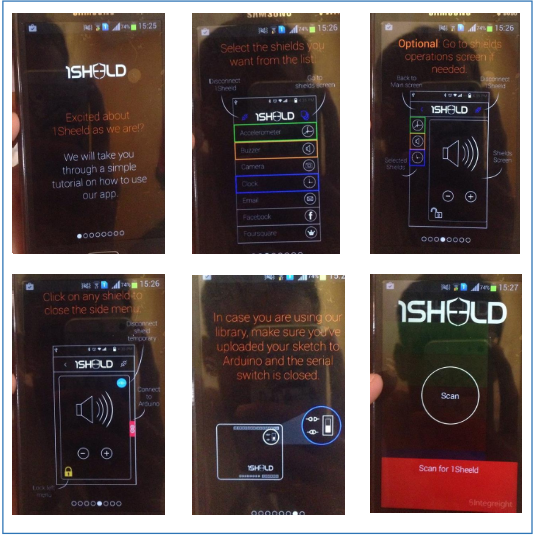
Paso 2
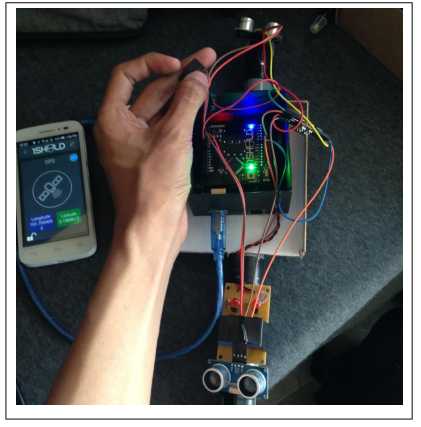
Después de encenderlo usando la batería que se conecta al adaptador de corriente USB en el microcontrolador Arduino Uno, el guardián siempre debe permitir que la conexión Bluetooth (teléfono inteligente Android) se conecte al microcontrolador. Luego, debe abrir las aplicaciones 1Sheeld que ya están instaladas en el teléfono inteligente y habilitar las funciones de GPS y SMS.
** Sí, sé que las personas ciegas no pueden ver y acceder al teléfono inteligente, pero al menos si tú o yo logramos hacer la modificación en el teléfono inteligente con sistema operativo Android, será mucho más fácil. Ya hice todo lo posible para encontrar un mejor teléfono inteligente que proporcione un botón braille, pero fallé. Por lo tanto, espero que en el futuro haya una actualización para mi prototipo.
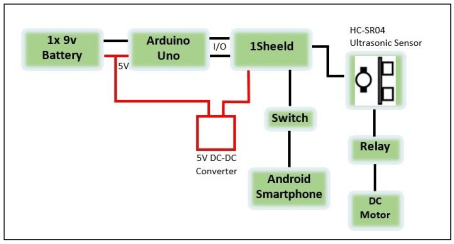
Paso 3
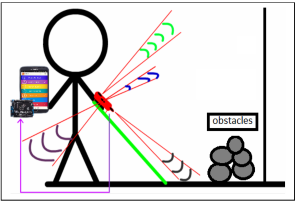
Según el diagrama de bloques anterior, como puede ver, así es como ocurre la conexión entre dispositivos. Después de que estos dos estén encendidos, las personas ciegas pueden comenzar a usar el Blind Stick Navigator. Según la observación del bastón blanco tradicional, las personas ciegas siempre girarán alrededor del bastón ciego para obtener una confirmación de su entorno. Pero, con Blind Stick Navigator, les ayudará a recibir una notificación por vibración sobre el obstáculo en la mira central e inferior. El obstáculo detectado mediante el sensor ultrasónico HC-SR04. Se adjunta en la parte superior del palo y en la parte inferior del palo. Estoy usando tubería de PVC porque puedo poner el motor de CC vibrante dentro de la tubería de PVC. El modo de vibración se puede modificar en el código dado usando el software Arduino IDE.
Paso 4
Además de eso, el Blind Stick Navigator puede proporcionar la longitud y latitud de la ubicación de las personas ciegas. Esto se debe a que el teléfono inteligente actúa como proveedor y proporciona una ubicación GPS para este proceso. El interruptor de palanca es adicional para que las personas ciegas puedan hacer clic con más facilidad en el botón de emergencia para informar al destinatario que ya está perdido o en peligro. Al hacer clic en él una o un par de veces, el teléfono inteligente enviará un mensaje informando que necesitan ayuda y búsquelo según el enlace del GPS y el mapa de Google. El número del destinatario se puede configurar si el mensaje desea enviarse a la autoridad o al tutor de las personas ciegas únicamente. La longitud del palo es ajustable según la altura del usuario. Para este prototipo, estoy usando una longitud específica y la longitud de la detección se puede modificar en el código.
Paso 5
Por último, pero no menos importante, espero que mi prototipo se utilice en todo el mundo o se comercialice y ayude a las personas ciegas durante su viaje / vida. Además, lamento mucho mi gramática porque mi inglés no es muy bueno. No sé describir más en esta publicación. Toda la información que ya recopilé en el archivo adjunto. Puede consultar más sobre este proyecto en función del enlace que proporcioné a continuación.
Documento del Proyecto:
- FYP 1
- FYP 2
Póster del proyecto:
- FYP 1
- FYP 2
Video del proyecto:
- Video 1
- Video 2
Código
- OneSheeldBlindStickNavigator
OneSheeldBlindStickNavigator C / C ++
#define CUSTOM_SETTINGS # define INCLUDE_GPS_SHIELD # define INCLUDE_SMS_SHIELD / * Incluye la biblioteca 1Sheeld. * / # include#include #define trigPinL 4 # define echoPinL 5 # define echoPinH #define Vib1 12 # define Vib2 13 # define SW 8 / * Define una bandera booleana. * / boolean isInRange =false; float lat; float lon; String PhoneNumber ="0134087286"; String Message; String Message1; String Message2; char latitude [10]; char longitude [10]; void setup () {pinMode (trigPinL, PRODUCCIÓN); pinMode (echoPinL, ENTRADA); pinMode (trigPinH, SALIDA); pinMode (echoPinH, ENTRADA); pinMode (Vib1, SALIDA); pinMode (Vib2, SALIDA); pinMode (SW, ENTRADA); / * Iniciar comunicación. * / OneSheeld.begin (); // Serial.begin (9600);} bucle vacío () {larga duraciónL, distanciaL, duraciónH, distanciaH, MixDist; digitalWrite (trigPinL, LOW); // Añadida esta línea delayMicroseconds (2); // Añadida esta línea digitalWrite (trigPinL, HIGH); delayMicroseconds (10); // Añadida esta línea digitalWrite (trigPinL, LOW); durationL =pulseIn (echoPinL, HIGH); distanciaL =(duraciónL / 2) / 29,1; digitalWrite (trigPinH, LOW); // Añadida esta línea delayMicroseconds (2); // Añadida esta línea digitalWrite (trigPinH, HIGH); delayMicroseconds (10); // Añadida esta línea digitalWrite (trigPinH, LOW); durationH =pulseIn (echoPinH, HIGH); distanciaH =(duraciónH / 2) / 29,1; // Serial.println (distanciaL); // Serial.println (distanciaH); // retraso (1000); if (distanciaL> 40) {digitalWrite (Vib1, HIGH); } si (distanciaL <40) {digitalWrite (Vib1, LOW); } si (distanciaH <100) {digitalWrite (Vib1, HIGH); retraso (200); escritura digital (Vib1, BAJA); retraso (200); } / * Compruebe siempre si el GPS del teléfono inteligente y una determinada longitud y latitud se encuentran en un rango de 100 metros. * / //if(GPS.isInRange(30.0831008,31.3242943,100)) // {// if (! isInRange) // {/ * Enviar SMS. * / lat =GPS.getLatitude (); lon =GPS.getLongitude (); Mensaje1 =Cadena (lat, 8); Mensaje2 =Cadena (lon, 8); if (digitalRead (SW) ==0) {Mensaje ="¡Necesito ayuda! Estoy en latitud:" + Mensaje1 + "y longitud:" + Mensaje2; Mensaje ="Google Maps - https://www.google.co.in/maps/place/" + Mensaje1 + "," + Mensaje2; SMS.send (PhoneNumber, Message); retraso (3000); } // isInRange =true; //} //} // else // {// if (isInRange) // {/ * Enviar SMS. * / // SMS.send ("+ 601123413946", "El teléfono inteligente no está dentro del alcance"); // isInRange =false; //} //} retraso (1000);}
Esquemas
OneSheeldTONGKAT.fzzProceso de manufactura
- TinyML-Language Detector basado en Edge Impulse y Arduino
- Juego de giroscopio Arduino con MPU-6050
- Dados digitales Arduino
- Juego de ruleta DIY 37 LED
- ATtiny85 Mini Arcade:Serpiente
- Detector de alcance portátil
- Luz de escritorio reactiva de audio Arduino
- Coche robot inteligente de seguimiento facial
- Galvanoplastia con cobre
- NeoMatrix Arduino Pong
- Creador de secuencias de luz