


Wi-Servo:Servomotores Wi-Fi controlados por navegador
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Este proyecto muestra cómo controlar algunos servomotores de forma remota en una red Wi-Fi, utilizando un navegador de Internet normal (Firefox, por ejemplo). Esto se puede utilizar en varias aplicaciones:juguetes, robots, drones, movimiento horizontal / vertical de la cámara, etc.
Los motores estaban conectados a un Arduino Uno, que conecta la red Wi-Fi a través de un módulo ESP-8266. La interfaz de control fue diseñada con HTML y jQuery.
El tutorial de Miguel (http://allaboutee.com/2015/01/02/esp8266-arduino-led-control-from-webpage/), que muestra cómo encender / apagar los LED con ESP-8266, sirvió de inspiración para este publicar.
La técnica que se muestra aquí se utiliza en uno de mis proyectos:"Robô da Alegria". Puede encontrar más sobre esto en uno de los siguientes enlaces:
https://hackaday.io/project/12873-rob-da-alegria-joy-robot
https://www.facebook.com/robodaalegria/
https://github.com/ferauche/RoboAlegria
Paso 1:Electrónica

Para este proyecto, necesitará los siguientes componentes:
- Arduino Uno (comprar)
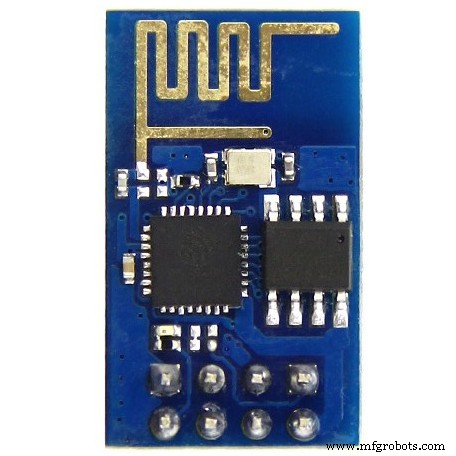
- ESP8266 (comprar)
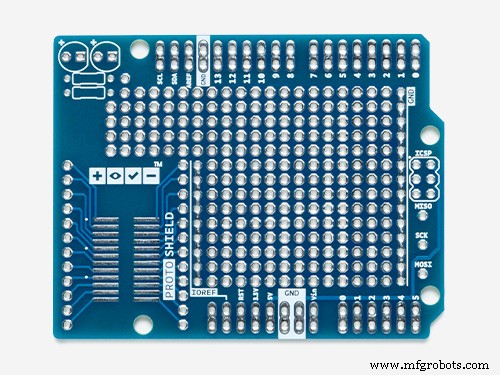
- Protoshield (para una versión más compacta) o una placa de pruebas normal (comprar)
- Resistencia de 10 kohm (x3)
- Algunos cables de puente
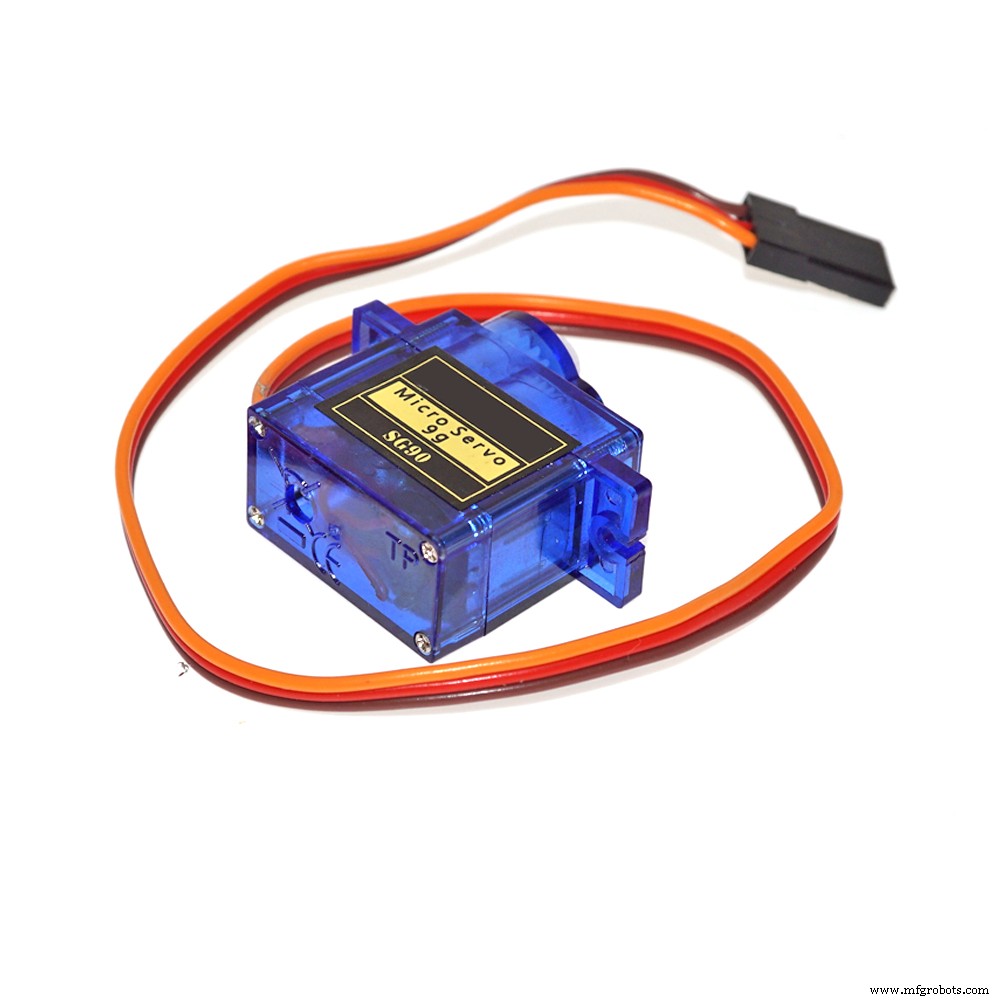
- Servomotor SG90 (x2) (comprar)
- Una computadora (para compilar y cargar código Arduino)
No necesitarás herramientas específicas para el montaje de este proyecto. Todos los componentes se pueden encontrar en línea en su tienda de comercio electrónico favorita. El circuito es alimentado por el puerto USB (conectado a una computadora o un cargador de teléfono ordinario), pero también puede agregar una fuente de alimentación de CC externa o una batería conectada al conector de alimentación Arduino.
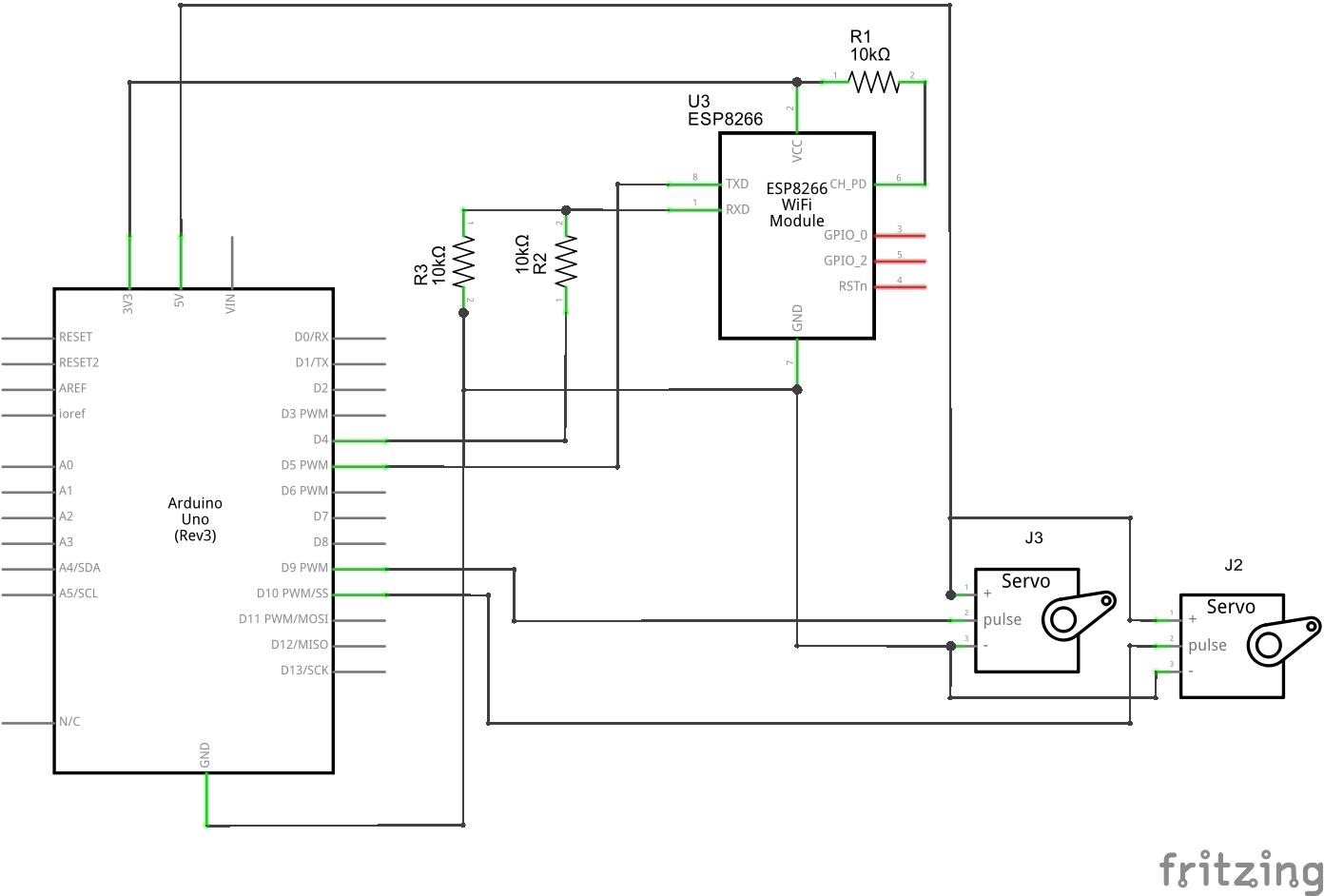
Paso 2:montaje
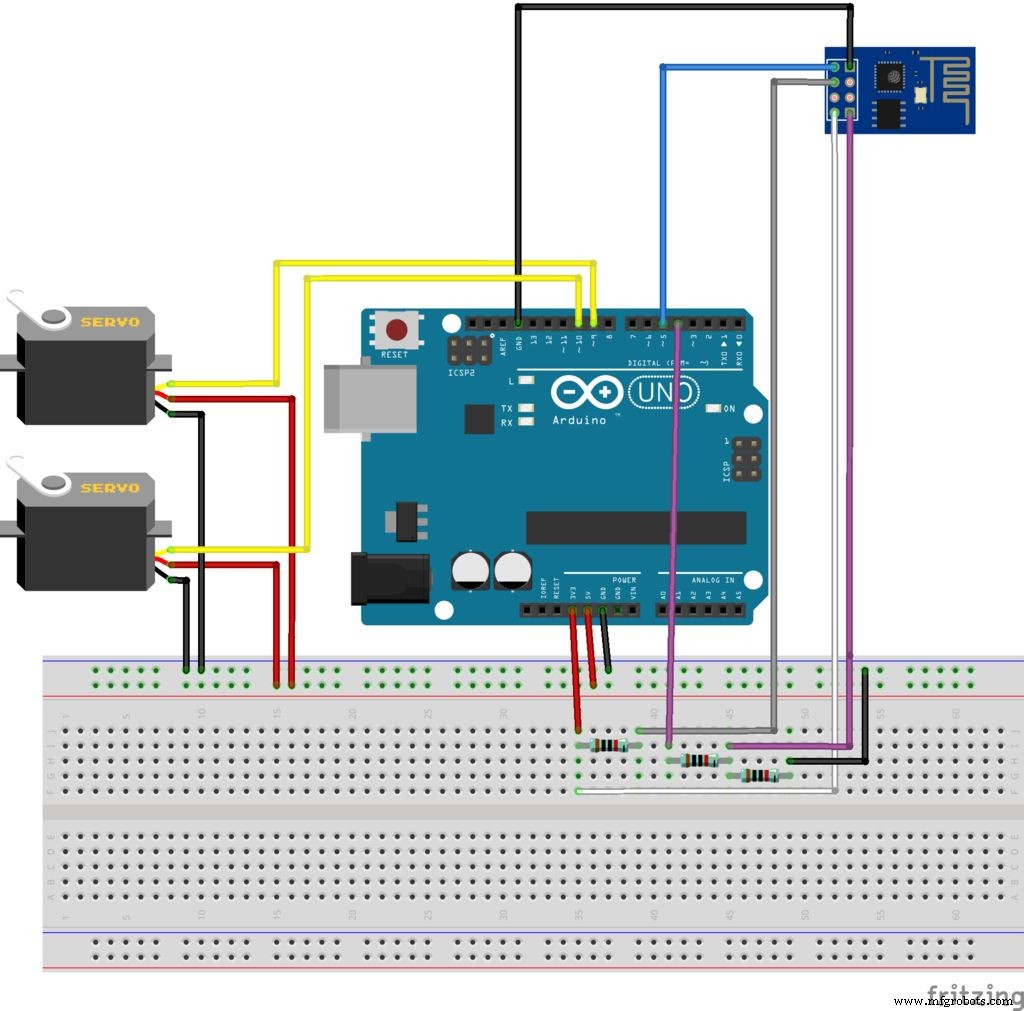
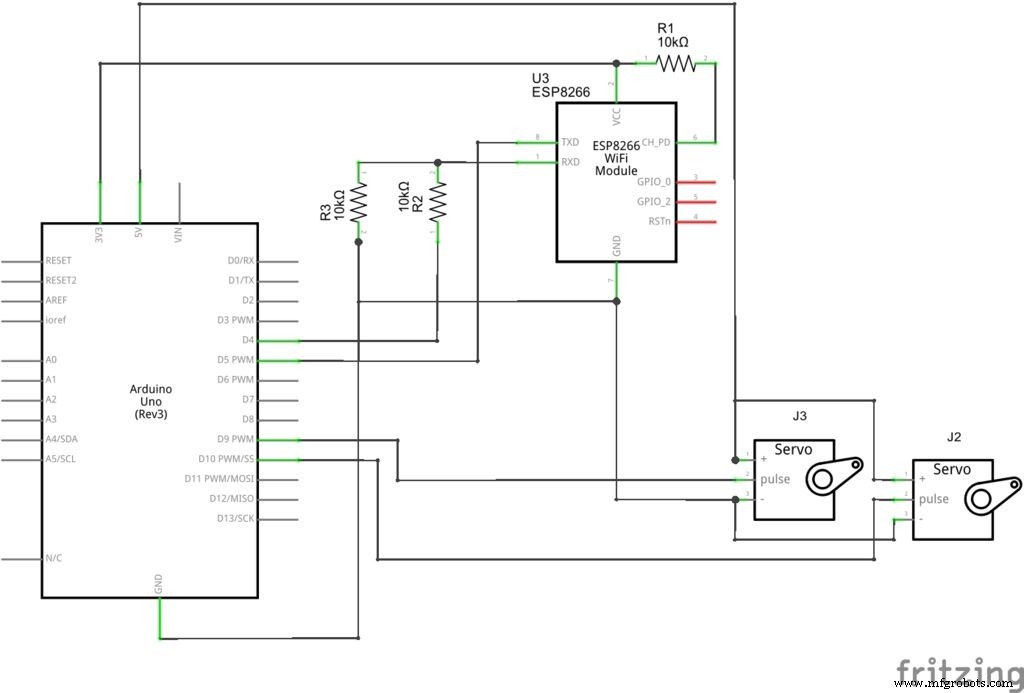
Conecte todos los componentes de acuerdo con el esquema. Necesitará algunos cables de puente para conectar el módulo ESP-8266 y los servomotores. Puede usar un proto-escudo (para un circuito más compacto), una placa de pruebas ordinaria o diseñar su propio escudo Arduino.
Conecte el cable USB a la placa Arduino Uno y continúe con el siguiente paso.
Paso 3:código Arduino
Instale el IDE de Arduino más reciente. En este proyecto se utilizó la biblioteca servo.h para el control de los servos. Para evitar conflictos entre el módulo Wi-Fi y el puerto USB de la computadora durante la carga del código, softserial se utilizó la biblioteca. No se necesitaba una biblioteca adicional para la comunicación con el módulo ESP-8266. Verifique la velocidad en baudios de su ESP8266 y configúrela correctamente en el código.
Algunos servomotores comienzan a temblar y hacen ruidos extraños cuando su posición está cerca de los límites (0 y 180 grados). Para evitar eso, el ángulo se limitó entre 10 y 170 grados tanto en el código Arduino como en la interfaz de control (más adelante).
Desafortunadamente, servo.h biblioteca y softserial.h biblioteca utiliza el mismo temporizador del microcontrolador. Esto podría causar inestabilidad en los servos cada vez que el Arduino se comunica con el ESP-8266. Para evitar eso, los servos se desconectan del Arduino después de cada comando. También puede conectar el módulo a los pines serie estándar. En este caso, recuerde desconectar el módulo antes de cada carga.
Descarga el código Arduino ( wi-servo.ino ) y reemplace el XXXXX por el SSID de su enrutador Wi-Fi y YYYYY por la contraseña del enrutador. Conecte la placa Arduino al puerto USB de su computadora y cargue el código.
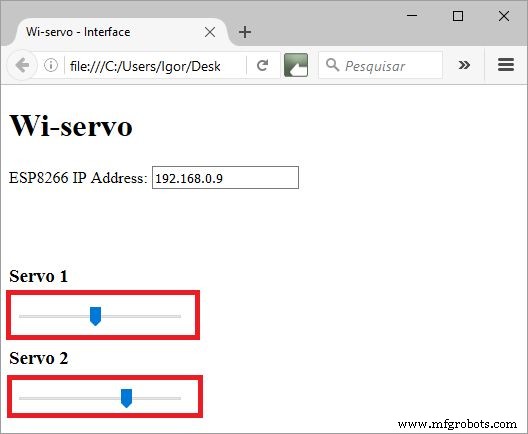
Paso 4:Interfaz
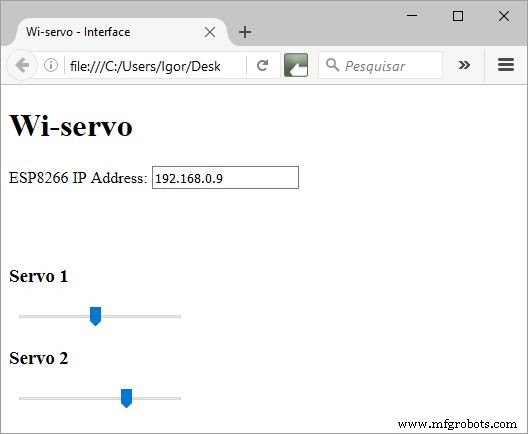
Se diseñó una interfaz HTML para el control de los servomotores. En este ejemplo, se usaron dos servos, pero se pueden agregar más al Arduino Uno (probé hasta cuatro motores).
Se utiliza un formulario de cuadro de texto para ingresar la dirección IP del módulo ESP. Descarga Wi-servo.html y jquery.js archivos y guárdelos en la misma carpeta.
Paso 5:uso
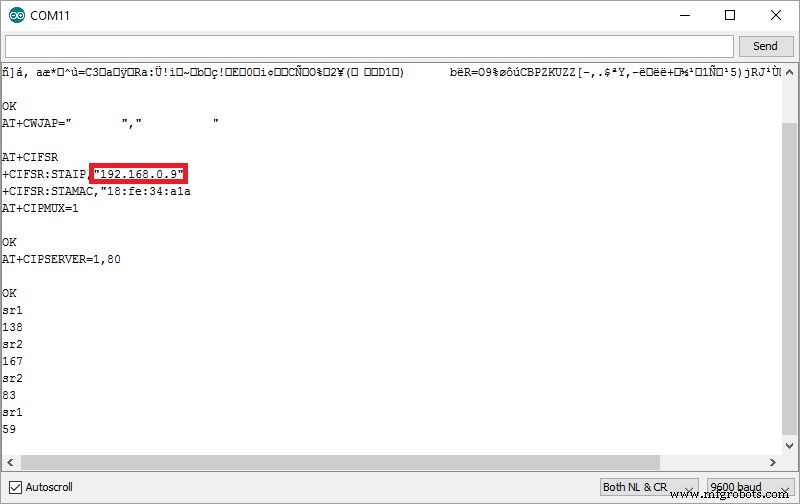
Cuando se reinicia el Arduino, intentará conectar su red Wi-Fi automáticamente. Utilice el monitor serial para verificar si la conexión fue exitosa y para obtener qué IP fue asignada a su ESP-8266 por su enrutador.
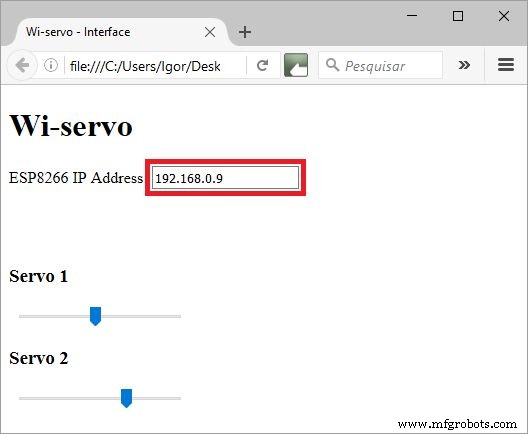
Abra el archivo html en un navegador de Internet (Firefox).
Informe la dirección IP de su ESP-8266 en el cuadro de texto y estará listo para comenzar. Seleccione el ángulo deseado para cada servo usando los controles deslizantes. El navegador enviará automáticamente una solicitud al Arduino cuando suelte el botón del mouse y mueva cada servo.
Código
Github
https://github.com/ferauche/RoboAlegriahttps://github.com/ferauche/RoboAlegriaEsquemas
Proceso de manufactura
- Robot Raspberry Pi controlado por Bluetooth
- WebServerBlink usando Arduino Uno WiFi
- Coche RC controlado por joystick
- Calculadora UNO simple
- Brazo robótico controlado por Nunchuk (con Arduino)
- Robot controlado por voz
- Persistencia de la visión
- Robot de piano controlado por Arduino:PiBot
- Luz controlada por toque usando Arduino
- Trackpad USB controlado por Arduino
- Monitoreo de temperatura en teléfonos inteligentes