


Brazo robótico Arduino impreso en 3D
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Este proyecto utiliza 4 piezas. Servomotores SSG 90 baratos que funcionan con la placa Arduino. Puede descargar archivos .stl para impresión 3D desde el enlace que se proporciona a continuación, o directamente a la web de Thingiverse,
https://www.thingiverse.com/thing:1015238
donde puede encontrar instrucciones más detalladas para hacer este brazo robótico.
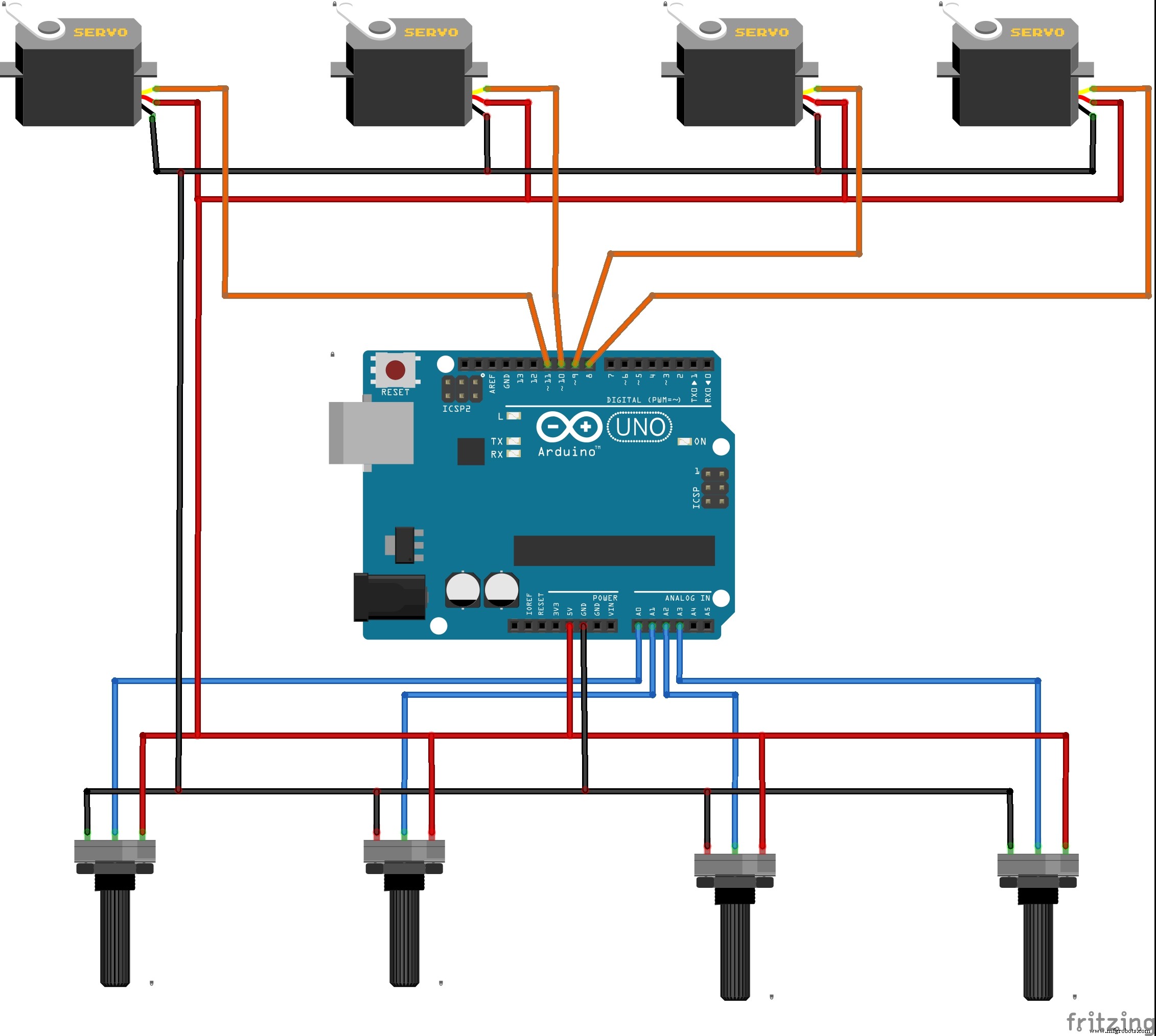
Como se mencionó anteriormente, los servomotores se manejan desde la placa Arduino. Para este propósito también escribí un código simple para que cada servo sea controlado por un potenciómetro adecuado. Después de un pequeño ejercicio, el manejo con potenciómetros se vuelve muy fácil e interesante como se puede ver en el video.
En el futuro intentaré ampliar el código con la opción de capturar y realizar automáticamente ciertos movimientos de los servomotores con lo que conseguiría un robot industrial completo.
Los esquemas se pueden ver en la siguiente imagen.
Código
- código
código Arduino
#includeServo myservo; // crear servoobjeto para controlar un servoServo myservo1; Servo myservo2; Servo myservo3; int potpin =0; // pin analógico utilizado para conectar el potenciómetro // variable para leer el valor del pin analógico int val1; int val2; int val3; void setup () {myservo.attach (8); // conecta el servo en el pin 8 al objeto servo myservo.attach (9); myservo.attach (10); myservo.attach (11);} bucle vacío () {val =analogRead (potpin); // lee el valor del potenciómetro (valor entre 0 y 1023) val =map (val, 0, 1023, 0, 180); // escalarlo para usarlo con el servo (valor entre 0 y 180) myservo.write (val); // establece la posición del servo de acuerdo con el valor escalado delay (15); // espera a que llegue el servo val1 =analogRead (potpin1); val1 =mapa (val1, 0, 1023, 0, 180); myservo1.write (val1); retraso (15); val2 =analogRead (potpin2); val2 =mapa (val2, 0, 1023, 0, 180); myservo2.write (val2); retraso (15); val3 =analogRead (potpin3); val2 =mapa (val3, 0, 1023, 0, 180); myservo3.write (val3); retraso (15); }
Piezas y carcasas personalizadas
eezybotarm_uVD6bjbxQi.zipEsquemas
Proceso de manufactura
- Dados digitales Arduino
- Uso de IoT para controlar de forma remota un brazo robótico
- Iron Man
- Encuéntrame
- Control del humidificador Arduino
- Brazo robótico controlado por Nunchuk (con Arduino)
- Brazo robótico simple e inteligente con Arduino
- NeoMatrix Arduino Pong
- Joystick de Arduino
- Receptor de radio FM Arduino TEA5767
- Podómetro (Arduino 101)