


Big Mouth Billy Bass + Alexa
Componentes y suministros
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
Herramientas y máquinas necesarias
 |
|
Acerca de este proyecto
Materiales
Billy Bass en la sala de operaciones de la biblioteca de herramientas de Toronto.
- Big Mouth Billy Bass *
- Echo Dot 2.ª generación
- Arduino Uno
- Arduino Motor Driver Shield
- Amplificador LM386
- Cable de audio de 3,5 mm
- Al menos 4 baterías de celda C
* Este Billy Bass parece más cercano al mío, cualquiera debería funcionar, pero algunos pueden contener solo dos motores
Desmontaje de Billy Bass
1. Billy Bass debería tener algunos tornillos bastante obvios en la parte posterior. Confíe en sus instintos y simplemente desenrosque esos (guardando los tornillos), y jale la espalda del pez. Esto debería abrirse para revelar los motores en el lado del pez y un paquete de baterías en la placa trasera.
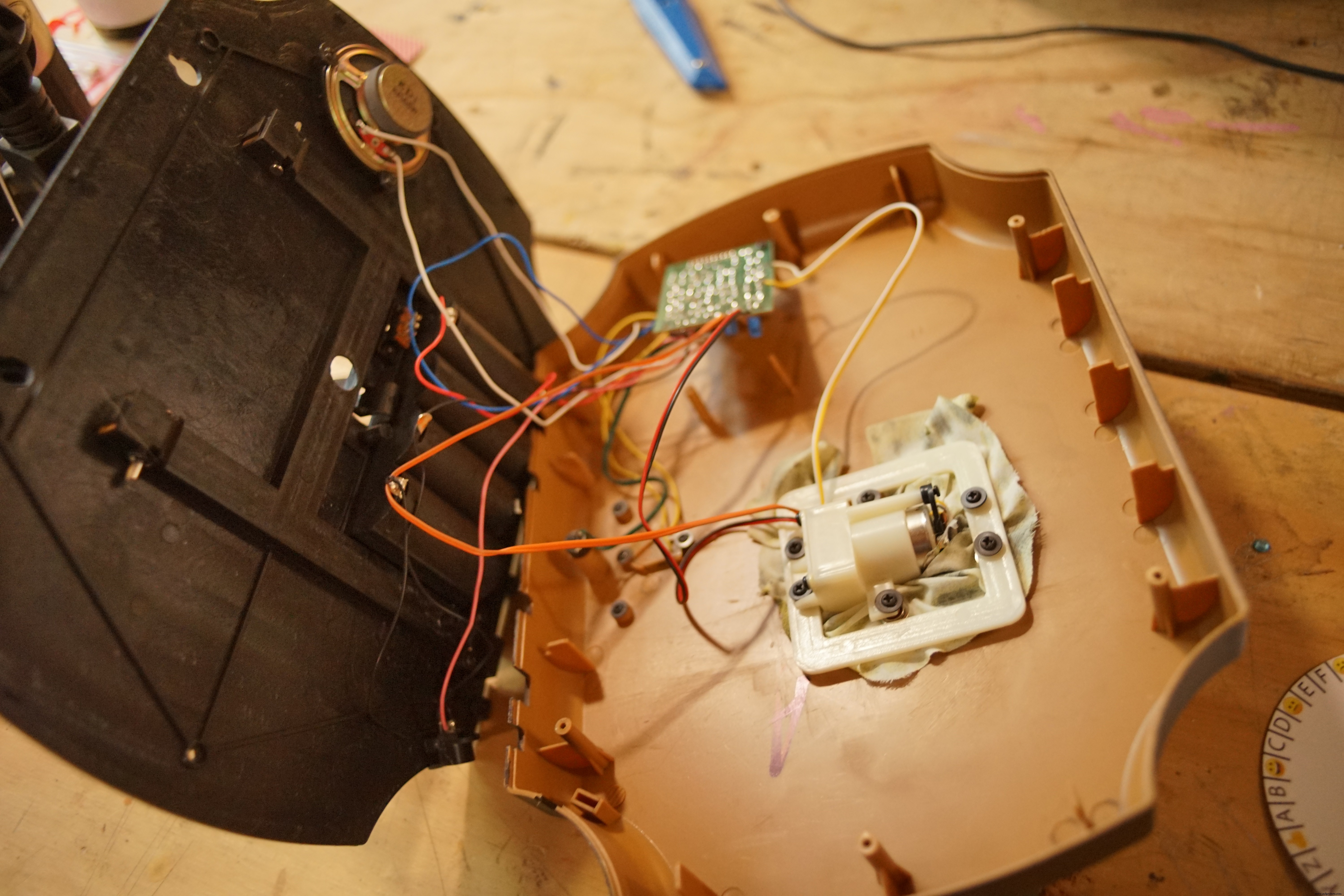
2. Verá una placa de circuito impreso en el interior con todos los cables conectados. Rastree los cables que vienen de los motores y córtelos para liberarlos de la placa Billy PCB, dejándose tanto cable como pueda (debería haber suficiente). Pegue o marque estos cables. Identifique los cables que provienen de la batería y córtelos libres de la PCB también. Estos se utilizarán más adelante para proporcionar energía a su Arduino a través del Motor Shield.
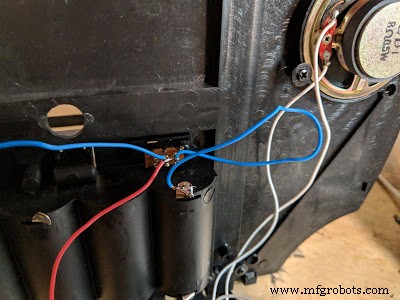
3. (Opcional) Identifique el interruptor que se utiliza para activar y desactivar el sensor de movimiento del pez. Corte sus cables y suelde el cable positivo del terminal de la batería para que pase a través de este interruptor, permitiendo que se use para encender y apagar la energía de Billy a los motores. Esto es por conveniencia y no es estrictamente necesario.
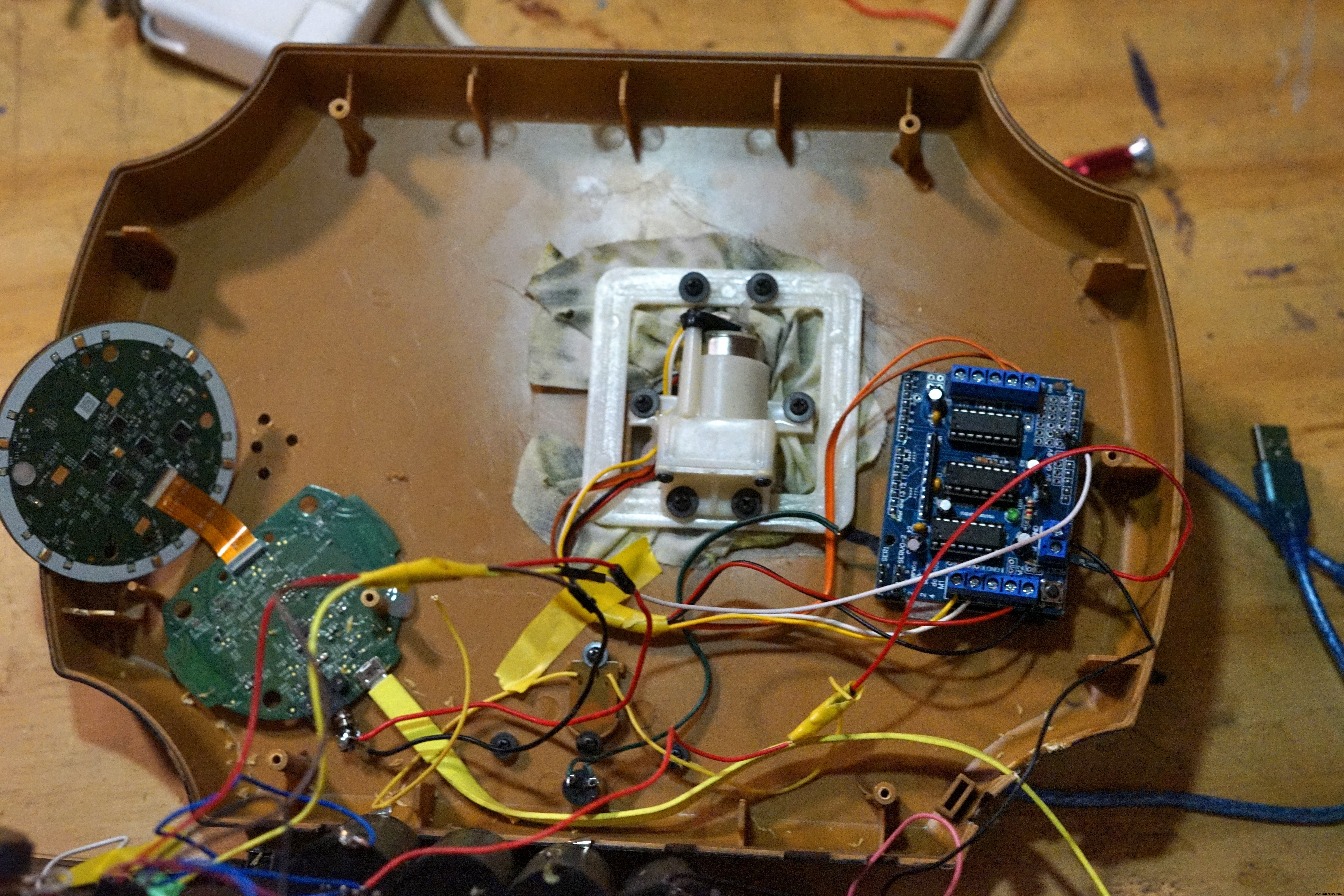
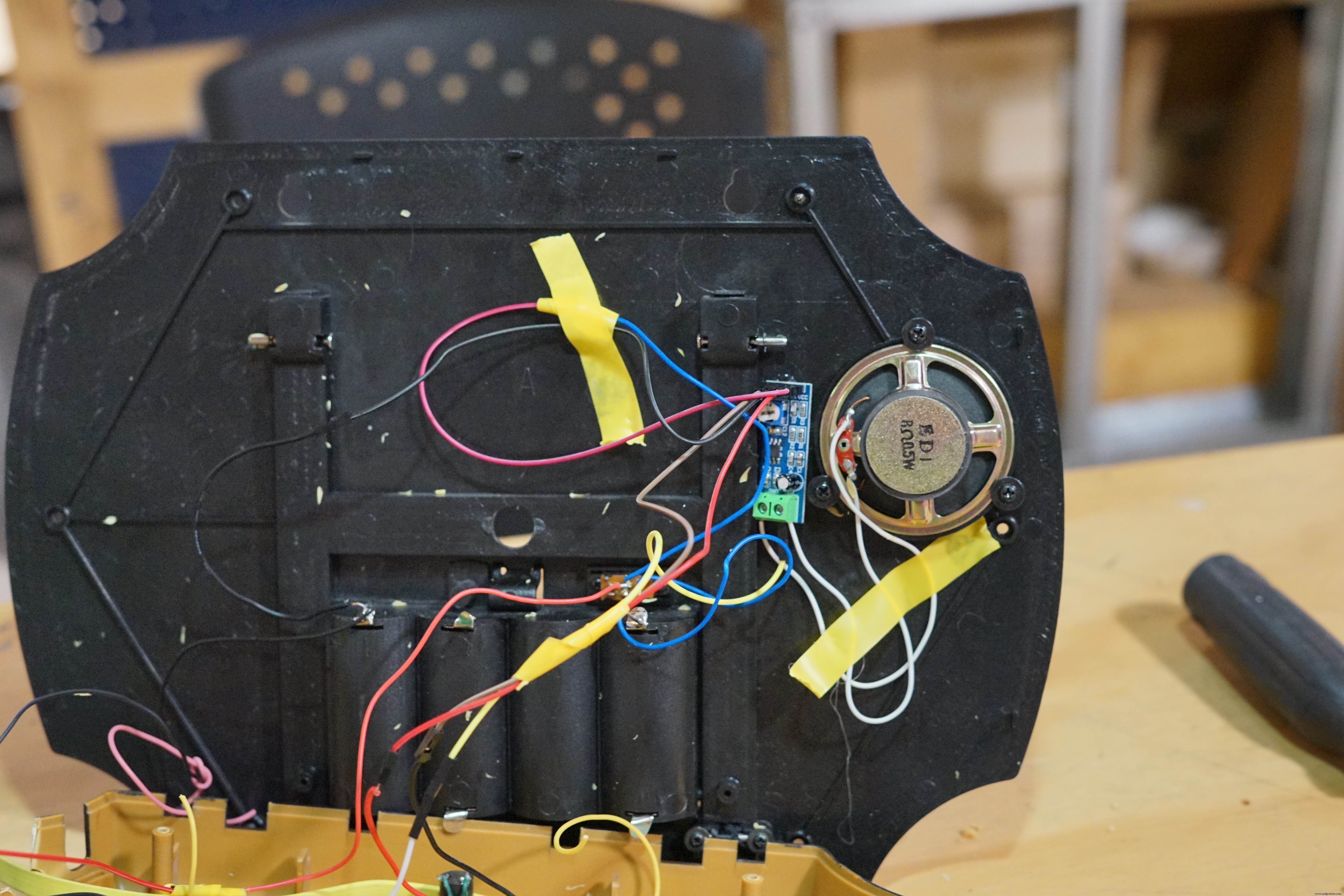
4. Conecte el protector de su motor a su Arduino y conecte los cables positivo y negativo de los motores a los primeros tres puertos del motor en el protector del motor (etiquetados M1, M2, M3). Conecte los cables positivo y negativo del paquete de baterías de Billy a los terminales etiquetados EXT_PWR.
Blindaje del motor con 3 cables de motor conectados:dos en la parte inferior, uno en la parte superior, junto con la energía del paquete de baterías en el lado derecho con los cables negro y rojo. El cable blanco está conectado al amplificador de audio que se describe en la siguiente sección.

Controlando los motores
Con todos los cables conectados, ahora puede cargar su primer boceto en el Arduino y confirmar que los motores funcionan como se esperaba. Primero deberá instalar Adafruit Motor Library para controlar el escudo de su motor siguiendo las instrucciones en su sitio. Una vez hecho esto, puede cargar este boceto de diagnóstico de motor en su Arduino, que debería conducir M1, M2 y M3 en secuencia.
Debe permanecer en este paso hasta que pueda controlar la cabeza, la boca y la cola mediante los motores del mismo nombre en el boceto de Arduino. Esto será necesario cuando agreguemos acciones más sofisticadas.
Si esto no funciona, es posible que deba asignar las variables de cabeza, boca y cola en el boceto a un número de motor diferente en función de cómo las conectó. Además, si la boca, la cola o la cabeza parecen moverse en la dirección incorrecta, puede invertir los dos cables conectados al protector del motor.
Detección de audio y desmontaje de puntos de eco
1. Quite la goma de la parte inferior de su Echo Dot (segunda generación), que revelará una capa adhesiva transparente que también puede despegar. Esto revelará cuatro tornillos Torx. Desatornille y retire estos cuatro tornillos, y su punto debería separarse en varias piezas.
Estamos interesados en las dos placas de circuito. Tenga cuidado con el cable plano que conecta los dos PCB. Esto vino desenchufado para mí unas 20 veces, por lo que es posible que desee adjuntarlo a la caja del pescado de inmediato (vea las fotos cerca del final de esta publicación para ver cómo adjunté la mía).

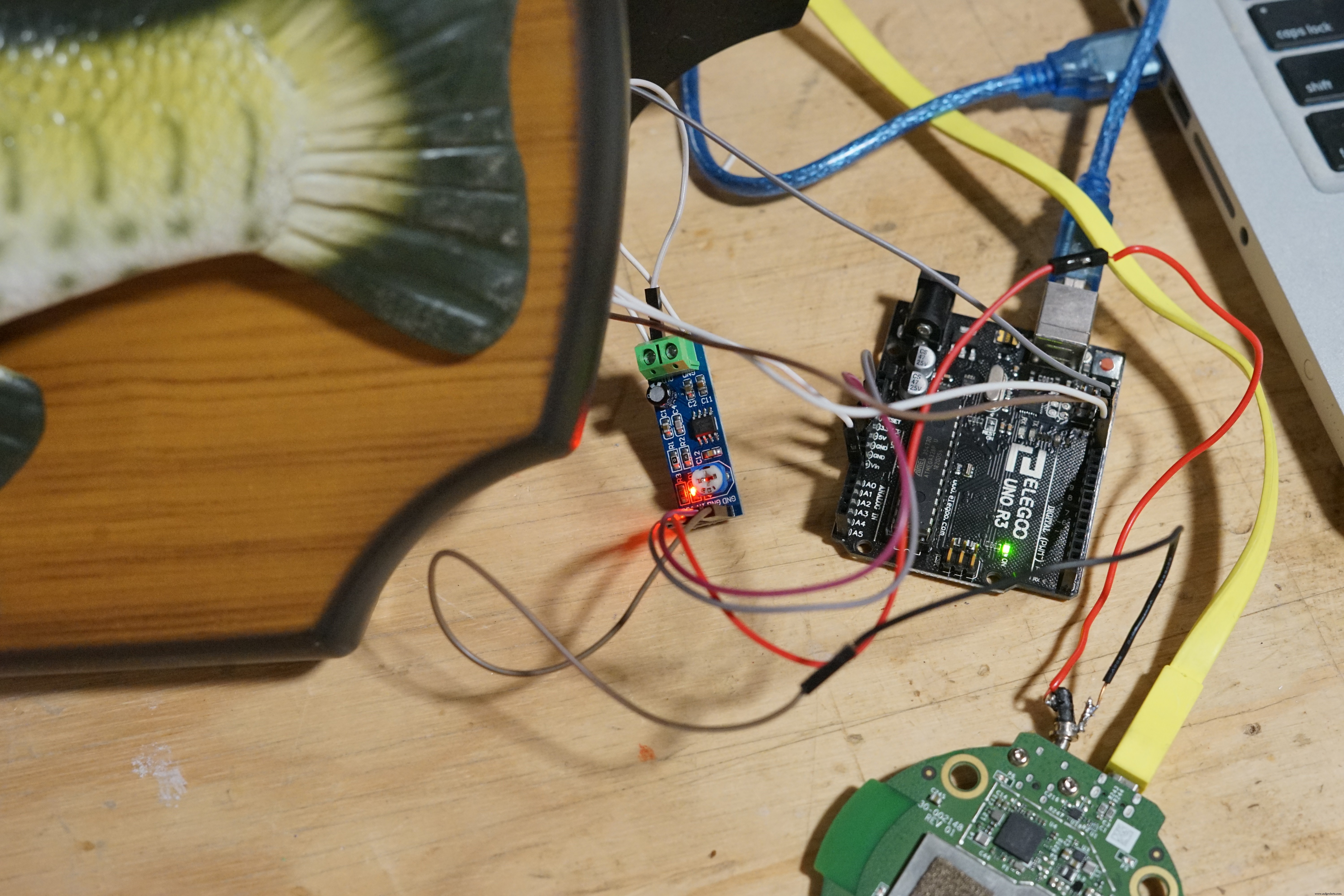
2. Corte el cable de audio de 3,5 mm muy cerca del conector. Quite la goma para revelar los contactos en la base del gato. Este contendrá un cable izquierdo, derecho y de tierra (en forma de muchos cables pequeños sueltos). Suelde un trozo de cable tanto a L como a R (convirtiendo la señal a mono) y retuerza los cables sueltos para formar un cable de tierra. Para obtener más información sobre el conector de audio, consulte esta publicación muy útil. En esta etapa, puede probar que la salida de audio aún funciona con un altavoz portátil.

3. Conecte el cable de señal (L y R mono) a la clavija IN en la placa del amplificador LM386 y conecte la clavija de tierra a la tierra de la señal de audio. Ejecute cables desde la salida Arduino 5V / GND al VCC del amplificador y al segundo pin GND (también puede usar el paquete de baterías Billy Bass para VCC y GND). Ahora conecte los cables del altavoz de Billy Bass al amplificador.
En este punto, debería poder conectar el conector de audio de 3,5 mm al Echo Dot y escuchar a Alexa a través del altavoz. Si no puede escuchar música, intente girar el tornillo pequeño (potenciómetro) en el amplificador para aumentar la ganancia. Sin embargo, esto introducirá ruido, así que trate de mantener la ganancia lo más baja posible.
4. Con los 4 pines del amplificador orientados en la parte inferior, tendrá los dos terminales de cable de altavoz en la "parte superior". Conecte un cable adicional al terminal del altavoz superior izquierdo y conéctelo al pin analógico 0 de su Arduino. Para propósitos de prueba, esto se puede hacer sin el protector del motor adjunto. Sin embargo, una vez que esté funcionando, tendrá que soldar esto a la conexión del blindaje del motor marcada A0 (en realidad, usé A1 accidentalmente; cualquier pin analógico será suficiente) .
Bosquejo de Arduino de diagnóstico de audio
Si ha seguido los pasos anteriores correctamente, hay dos pruebas para confirmar que está en el camino correcto. ¡Debe asegurarse de que estas dos comprobaciones funcionen antes de continuar con el siguiente paso!
1. Cuando reproduces música desde tu Echo ("Alexa, toca Slayer"), en realidad escuchas algo.
Si esto no funciona, verifique que la energía que ingresa al amplificador esté configurada correctamente y verifique que los cables del audio de 3,5 mm estén conectados correctamente.
2. Cuando carga este boceto de diagnóstico de audio en su Arduino y abre el Monitor en serie (9600 baudios), puede ver un mensaje de registro que indica si se está reproduciendo música o no. También puede ver el LED integrado del Arduino, que debe iluminarse cuando se reproduce música y apagarse en caso contrario.
Si el paso 2 no funciona, intente conectar su cable analógico al otro terminal en los puertos de altavoz que viene del amplificador. Es posible que también deba ajustar el valor "quietThreshold" en el esquema para calibrar correctamente para que no se reproduzca sonido, aunque en el siguiente paso promediaremos este valor para hacerlo más estable.
Poniéndolo todo junto
Después de determinar de forma independiente que podemos hacer que todos los motores se muevan, y que podemos reproducir música y medir desde el Arduino cuando se está reproduciendo música, solo necesitamos combinar los componentes.
Esto se hace simplemente conectando la señal del amplificador al puerto A0 en el blindaje del motor y conectando todos los motores. Empujar este boceto que combina la lectura de la señal de audio con algunos movimientos de motor más avanzados en su Arduino ahora debería activar animaciones de peces cada vez que se reproduce música.
Enchufe su Echo a una fuente de alimentación y conéctelo al cable de audio de 3,5 mm, ¡y debería ver cómo su pez adquiere la personalidad de Alexa! Ahora estamos en la recta final.

Ahora todo lo que queda es colocar los componentes electrónicos dentro de la caja de Billy y volver a cerrarla. Usé las pestañas espaciadoras de plástico en Billy Bass para mantener el Dot en su lugar pegando la PCB inferior a la carcasa y colocando un tornillo a través de la PCB superior en uno de los elevadores de tornillos existentes para la carcasa que corté por la mitad. El amplificador se pegó a la placa de respaldo (lo más lejos posible del altavoz, ya que hay un crujido cuando están muy juntos), y el Arduino se pegó en caliente en el espacio restante. Tenga en cuenta que es posible que desee desarmar esto nuevamente, así que use conexiones de cables largas o desmontables.
Finalmente, probablemente querrá perforar algunos agujeros en el plástico de Billy para que el audio pueda viajar más fácilmente al micrófono del Echo Dot. También hice un agujero en el costado de la caja de Billy para poder sacar dos cables USB del cuerpo. Uno para programar el Arduino si quería seguir jugando, y el otro para alimentar el Echo Dot (usando una batería USB portátil). Creo que si conectaste un cable USB a la batería de Billy, también podrías alimentar el Echo Dot directamente desde eso, pero mi único intento no tuvo éxito. Actualizaré esta página si consigo hacerlo.

Conclusiones
Así que aquí hay una publicación más de blog sobre cómo convertir a Billy Bass en un pez inteligente. Al usar el Echo Dot en lugar de una Raspberry Pi, obtienes todas las capacidades de Alexa de primera parte, como llamadas directas. Habiendo dicho eso, no puedes ser tan inteligente sobre qué tipo de sonidos está haciendo Billy. Podría ser divertido volver a visitar esto con Alexa en una Raspberry Pi para poder escribir algunas animaciones diferentes cuando se detecte la voz, o incluso agregar otra capa de procesamiento de audio para que parezca que el pez está bajo el agua. Pero tendré que dejar eso para un día lluvioso.
Espero que hayas disfrutado de la redacción y ¡buena suerte hackeando!
Código
Gist
https://gist.github.com/benrules2/f9268a320d99863fe9dbd330351af56a Gist https://gist.github.com/benrules2/9b6c730084e6fbb46ca1c8b4036e8c9c Gist https://gist.github.com/benrules2/2f5304627c109e4ceb31b8ec12d69ee0
Proceso de manufactura
- Vaya a lo grande o vaya a casa con su nuevo diseño de producto
- Entrevista:Dr. Billy Wu del Imperial College London
- Medidor Modix BIG
- Amazon Alexa Controlando un Chromecast
- MajorTom:ARDrone 2.0 controlado por voz de Alexa
- Aprovechando al máximo los macrodatos
- Habilita el control de Alexa en tu ventilador de techo
- Alexa, enciende ESTA lámpara:Sensor 3D inteligente para Amazon Echo
- LED controlados por Alexa a través de Raspberry Pi
- Gran ventaja de la multitarea
- Big Data vs Inteligencia Artificial