


Diseño de un sistema de retroalimentación de reacción rápida para diseños miniaturizados impulsados por motores
La información de rotación del motor, como la posición, la velocidad y la dirección, debe ser precisa para producir controladores y controladores precisos en una amplia variedad de aplicaciones emergentes, por ejemplo, en máquinas de recoger y colocar que montan componentes microscópicos en la placa de circuito impreso limitada. (PCB) área. Recientemente, los controles de motores se han miniaturizado, lo que permite nuevas aplicaciones en robótica quirúrgica para la atención médica y en drones para la industria aeroespacial y de defensa. Los controladores de motor más pequeños también permiten nuevas aplicaciones en instalaciones industriales y comerciales. El desafío para los diseñadores es cumplir con el requisito de alta precisión del sensor de retroalimentación de posición en una aplicación de alta velocidad, mientras que al mismo tiempo se infunden todos los componentes en el espacio limitado de la PCB para que quepan dentro de recintos diminutos, como un brazo robótico.
haz clic para ampliar la imagen
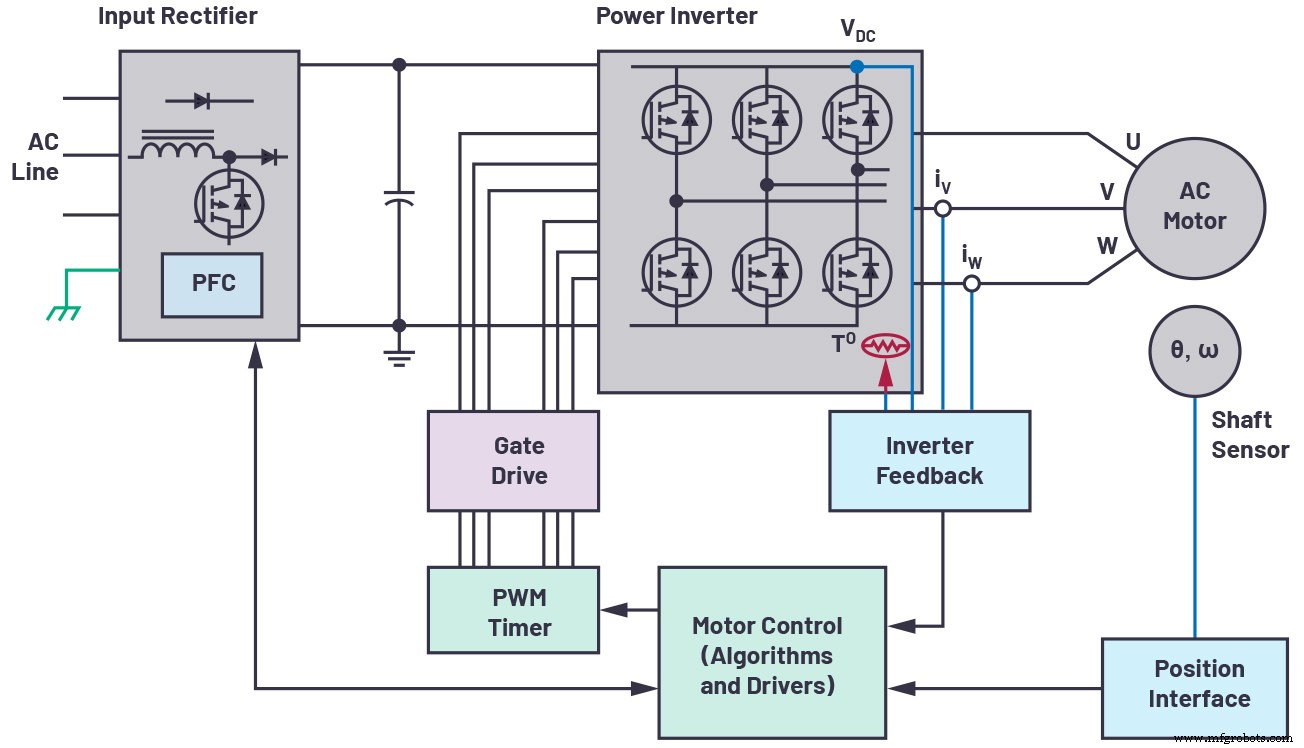
Figura 1. Sistema de retroalimentación de control de motor de circuito cerrado. (Fuente:Analog Devices, Inc.)
Control de motor
Los lazos de control del motor, como se ve en la Figura 1, están compuestos principalmente por un motor, un controlador y una interfaz de retroalimentación de posición. El motor hace girar un eje giratorio que hace que los brazos de una máquina se muevan en consecuencia. El controlador del motor le dice al motor cuándo aplicar fuerza, detenerse o continuar girando. La interfaz de posición en el lazo proporciona información de posición y velocidad de rotación al controlador. Estos datos son fundamentales para el correcto funcionamiento de una máquina de recogida y colocación para el montaje de una placa de circuito impreso pequeña de montaje en superficie. Todas estas aplicaciones requieren información de medición de posición precisa sobre el objeto giratorio.
La resolución del sensor de posición debe ser muy alta, lo suficiente para detectar con precisión la posición del eje del motor, recoger correctamente un componente diminuto y colocarlo con precisión en una placa. Además, las velocidades de rotación del motor más altas conducen a un mayor ancho de banda de bucle y menores requisitos de latencia.
Sistema de retroalimentación de posición
En una aplicación de gama baja, un sensor incremental junto con un comparador puede ser suficiente para la detección de posición, mientras que una aplicación de gama alta requerirá cadenas de señales más complejas. Estos sistemas de retroalimentación comprenden el sensor de posición, seguido del acondicionamiento de la señal de entrada analógica, el convertidor de analógico a digital (ADC) y su controlador antes de que los datos ingresen al dominio digital.
Uno de los sensores de posición más precisos es el codificador óptico. Un codificador óptico está compuesto por una fuente de luz de diodo emisor de luz (LED), un disco marcado unido al eje del motor y un fotodetector. El disco presenta un patrón enmascarado de áreas opacas y transparentes que oscurecen la luz o permiten que pase. Los fotodetectores detectan la luz resultante y las señales de luz de encendido / apagado se convierten en señales eléctricas.
A medida que el disco gira, los fotodetectores, junto con los patrones del disco, producen pequeñas señales de seno y coseno, en el nivel de mV o µV. Este sistema es típico en un codificador óptico de posición absoluta. Estas señales se alimentan a un circuito de acondicionamiento de señales analógicas, que generalmente consta de un amplificador discreto o un amplificador de ganancia programable analógico (PGA) para ganar la señal hasta el rango de pico a pico de 1 V, comúnmente para ajustarse a un rango de voltaje de entrada de ADC para un rango dinámico máximo. Cada una de las señales de seno y coseno amplificadas son luego adquiridas por un amplificador de controlador de ADC de muestreo simultáneo.
El ADC debe contar con muestreo simultáneo en sus canales de manera que los puntos de datos de seno y coseno se tomen exactamente en el mismo punto en el tiempo, ya que esa combinación proporciona la información de posición del eje. Los resultados de la conversión de ADC se pasan a un circuito integrado específico de la aplicación (ASIC) o microcontrolador. El controlador del motor consulta la posición del codificador en cada ciclo de modulación de ancho de pulso (PWM) y usa estos datos para impulsar el motor según las instrucciones que recibe. En el pasado, los diseñadores de sistemas tenían que cambiar la velocidad de ADC o el número de canales para adaptarse a las restricciones de espacio de la placa.
haz clic para ampliar la imagen
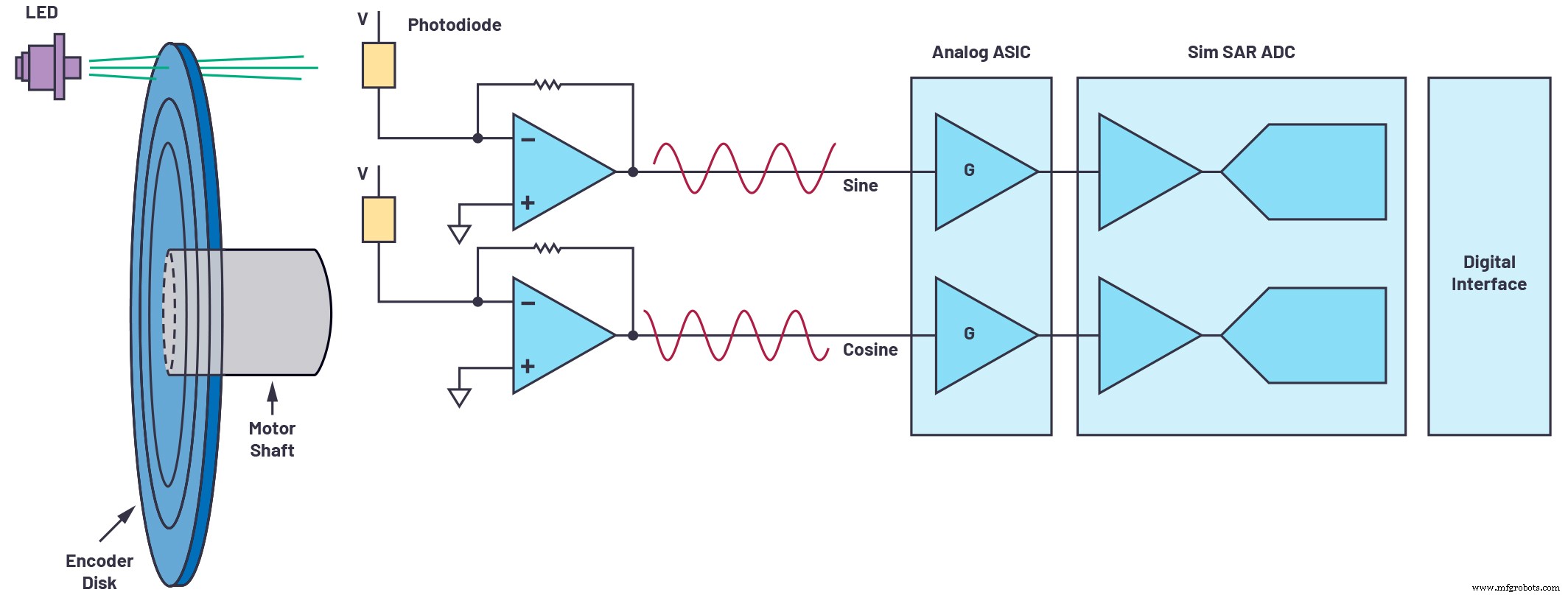
Figura 2. Sistema de retroalimentación de posición. (Fuente:Analog Devices, Inc.)
Optimización de los comentarios de posición
Las demandas de la tecnología en evolución han dado como resultado la innovación en aplicaciones de control de motores que requieren detección de posición de alta precisión. La resolución del codificador óptico se puede basar en el número de ranuras inscritas en una litografía fina en un disco, generalmente cientos o miles.
La interpolación de estas señales de seno y coseno a un ADC de alta velocidad y alto rendimiento nos permitirá crear codificadores de mayor resolución sin requerir cambios de sistema en el disco codificador. Por ejemplo, cuando se muestrea una señal de seno y coseno del codificador a una velocidad más lenta, se capturan menos valores de la señal, como se muestra en la Figura 3; esto también limita la precisión del límite de posición.
haz clic para ampliar la imagen
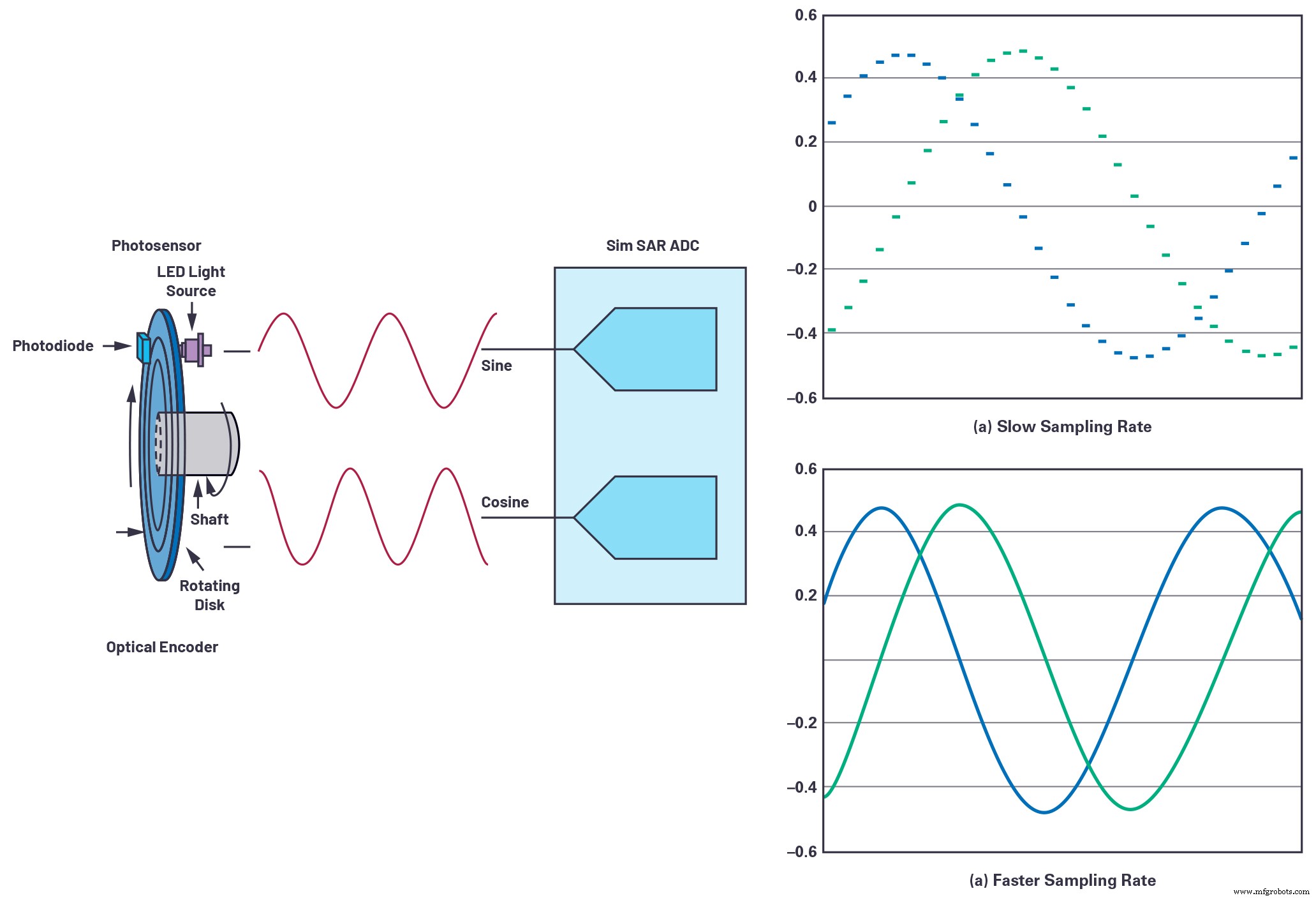
Figura 3. Tasa de muestreo. (Fuente:Analog Devices, Inc.)
En la Figura 3, cuando el ADC muestrea a una velocidad más rápida, se capturan valores más detallados de la señal y se determina una posición de mayor precisión. Una frecuencia de muestreo de alta velocidad del ADC permite el sobremuestreo, lo que mejora aún más el rendimiento del ruido y elimina algunas necesidades de posprocesamiento digital. Al mismo tiempo, reduce la tasa de datos de salida del ADC; es decir, permitiendo señales de frecuencia serial más lentas, simplificando así la interfaz digital. El sistema de retroalimentación de la posición del motor está montado en el conjunto del motor, que puede ser bastante pequeño en ciertas aplicaciones. Por lo tanto, el tamaño es vital para encajar en el área limitada de PCB del módulo codificador. El surgimiento de componentes de múltiples canales en un solo paquete pequeño es más adecuado para ahorrar espacio.
Ejemplo de diseño de retroalimentación de posición de codificador óptico
En la Figura 4 se muestra un ejemplo de un sistema de retroalimentación de posición de codificador óptico optimizado. El circuito puede conectarse a un tipo absoluto de codificador óptico donde el circuito puede capturar señales diferenciales de seno y coseno del codificador. La Figura 4 muestra un amplificador ADA4940-2 frontal, de doble canal, totalmente diferencial que impulsa el ADC, en este caso un AD7380, un ADC SAR de muestreo simultáneo de 4 MSPS, de doble canal, 16 bits, totalmente diferencial, alojado en un paquete LFCSP pequeño de 3 mm × 3 mm.
haz clic para ampliar la imagen
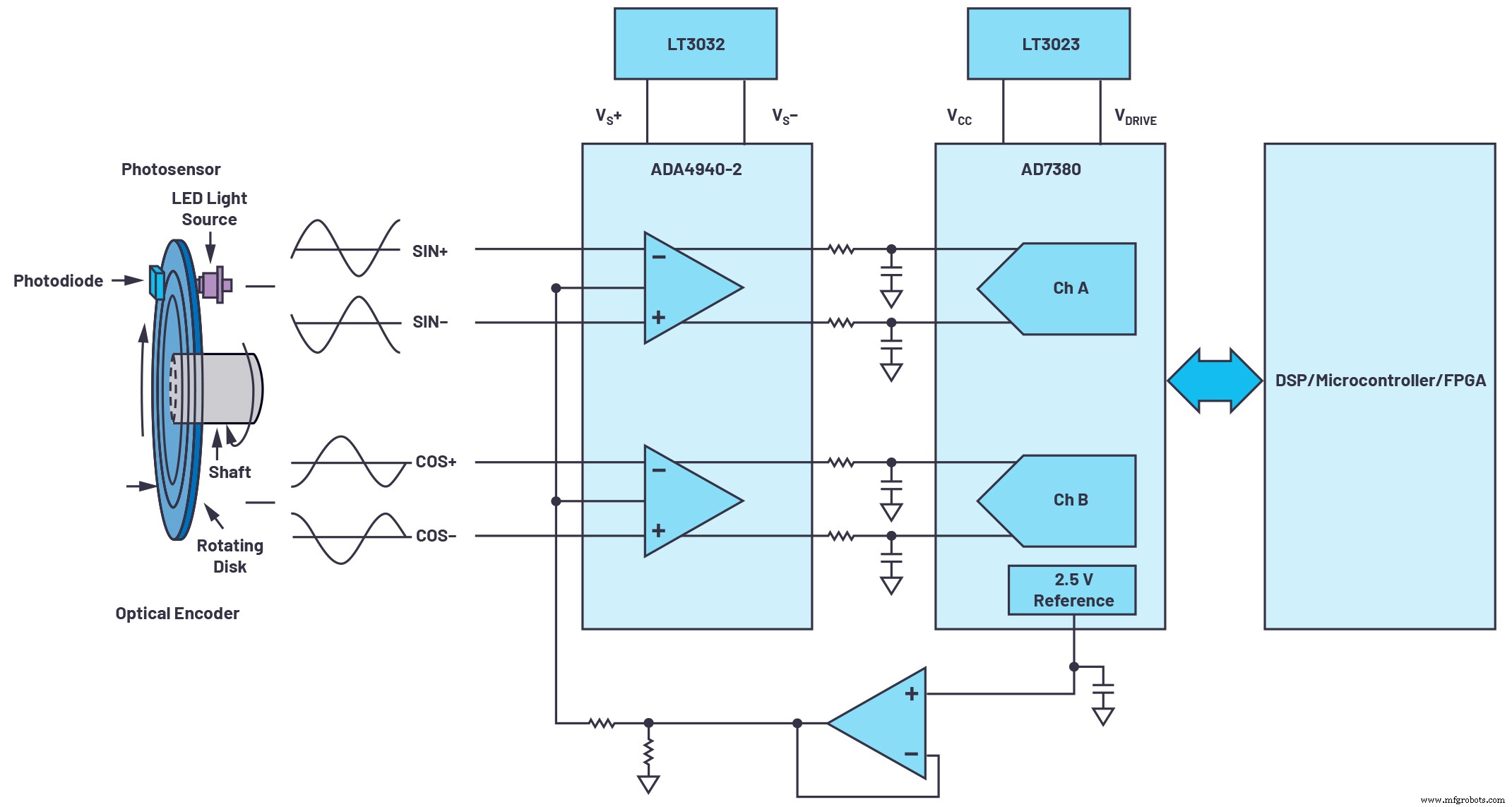
Figura 4. Diseño optimizado del sistema de retroalimentación. (Fuente:Analog Devices, Inc.)
La referencia de 2,5 V en el chip permitiría requisitos mínimos de componentes para este circuito. El VCC y VDRIVE del ADC y los rieles de suministro del controlador del amplificador pueden ser alimentados por un regulador LDO, como el LT3023 y LT3032. Cuando estos diseños de referencia están interconectados, por ejemplo, con un codificador óptico de 1024 ranuras que produce 1024 ciclos de seno y coseno en una revolución del disco del codificador, el AD7380 de 16 bits muestrea cada ranura del codificador en 216 códigos, aumentando en general el codificador resolución de hasta 26 bits.
La tasa de rendimiento de 4 MSPS garantiza que se capturen los ciclos de seno y coseno detallados y que las posiciones del codificador estén actualizadas. La alta tasa de rendimiento permite el sobremuestreo en el chip, lo que reduce la penalización de tiempo de los ASIC digitales o microcontroladores que alimentan la posición precisa del codificador al motor. El sobremuestreo en el chip permite 2 bits adicionales de resolución, que se pueden usar con una función de aumento de resolución en el chip. El aumento de resolución puede mejorar aún más la precisión hasta 28 bits.
Las demandas del sistema de control del motor para una mayor precisión, mayor velocidad y miniaturización están aumentando. Los codificadores ópticos se utilizan como dispositivos de detección de la posición del motor. Para hacer esto, la cadena de señal del codificador óptico debe tener un alto nivel de precisión al medir la posición del motor. Un ADC de alta velocidad y alto rendimiento captura información con precisión y envía datos de posición del motor al controlador, lo que permite niveles más altos de precisión y optimización en el sistema de retroalimentación de posición.
Acerca del autor
Sensor
- Sensor de oxígeno inalámbrico en miniatura para bebés enfermos
- Los controles de iluminación inteligentes para invernaderos reducen los costos
- Tecnología de encendido para dispositivos de propulsión eléctrica
- Sistema de propulsión para vuelo hipersónico
- Diseño de soluciones inteligentes para dispositivos de flujo de gas
- Sistema de calibración para colocación automatizada de fibras
- Preguntas y respuestas:Optimización de las baterías de iones de litio para una carga extremadamente rápida
- Diseño de conjuntos ópticos IR avanzados para vehículos aéreos no tripulados
- Sistema de detección química para bajos niveles de concentración
- Sistema de seguimiento de movimiento 3D para tecnología autónoma
- Conexiones para Control:Interfaces de Comunicaciones para Sensores de Posición y Movimiento