


Introducción a los acelerómetros capacitivos:medición de la aceleración con detección capacitiva
En este artículo, analizaremos cómo usar la detección capacitiva para medir la aceleración.
Los acelerómetros encuentran uso en diferentes áreas de aplicación. Por ejemplo, en aplicaciones de automoción, se utilizan acelerómetros para activar el sistema de airbag. Las cámaras utilizan acelerómetros para la estabilización activa de imágenes. Los discos duros de las computadoras también dependen de acelerómetros para detectar descargas externas que pueden dañar el cabezal de lectura / escritura del dispositivo. En este caso, el acelerómetro suspende el funcionamiento del variador cuando se produce una descarga externa. Estas son solo algunas aplicaciones del acelerómetro.
Las posibilidades son realmente infinitas para lo que se pueden utilizar estos dispositivos. Los enormes avances en las tecnologías de microfabricación han permitido los acelerómetros micromecanizados pequeños y de bajo costo de la actualidad. De hecho, el pequeño tamaño y el bajo costo son dos de los principales factores que nos permiten aplicar estos dispositivos a un espectro de aplicaciones tan amplio.
En este artículo, analizaremos la física de la medición de la aceleración. Veremos cómo una estructura de masa-resorte-amortiguador (también conocida como masa-amortiguador-resorte) puede convertir la aceleración en una cantidad de desplazamiento y cómo se puede aplicar el enfoque de detección capacitiva para convertir este desplazamiento en una señal eléctrica proporcional a la aceleración aplicada.
Medición de la aceleración con un amortiguador de resorte de masa
Se puede usar una estructura de amortiguador de resorte de masa como se muestra en la Figura 1 para medir la aceleración.
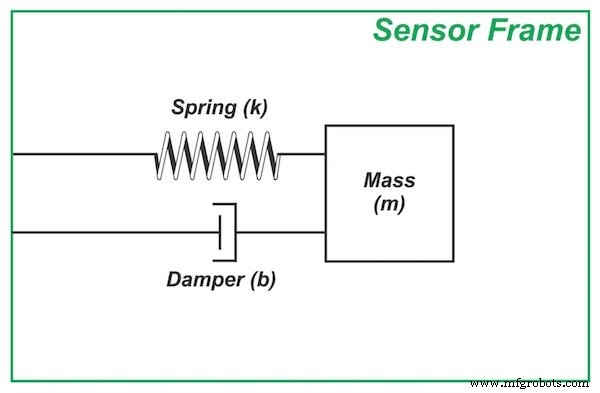
Figura 1. La estructura del amortiguador de resorte de masa
Una cantidad conocida de masa, comúnmente conocida como masa de prueba (o masa de prueba), se conecta al marco del sensor a través de un resorte.
Aunque el amortiguador es un componente vital de este sistema, lo dejaremos de lado hasta el próximo artículo de esta serie, ya que puede ser un poco misterioso para los EE y es posible que se requieran algunos párrafos para presentar los conceptos básicos de un amortiguador.
Veamos cómo la estructura que se muestra en la Figura 1 puede detectar la aceleración.
Cuando el marco del sensor se acelera debido a una fuerza externa, la masa de prueba tiende a "quedarse atrás" debido a su inercia. Esto cambia la posición relativa de la masa de prueba con respecto al marco del sensor como se ilustra a continuación.
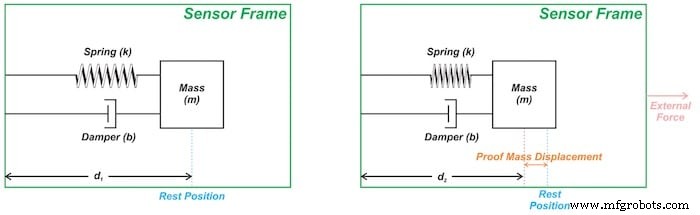
Figura 2. (a) La masa de prueba está en su posición de reposo cuando no hay fuerza externa. (b) Cuando el marco se acelera hacia la derecha, el observador en el marco del sensor observa que la masa de prueba se desplaza hacia el lado izquierdo de su posición de reposo.
La figura 2 (a) muestra la masa de prueba en su posición de reposo cuando no hay fuerza externa. Cuando se aplica una fuerza externa al marco, como se muestra en la Figura 2 (b), el marco se acelera hacia la derecha. La masa de prueba inicialmente tiende a permanecer en reposo, lo que cambia la posición relativa de la masa de prueba con respecto al marco (d 2
Un observador en el marco no inercial (es decir, acelerado) del sensor observa que la masa de prueba se desplaza hacia el lado izquierdo de su posición de reposo. El resorte se comprime debido al desplazamiento de la masa de prueba y ejerce una fuerza proporcional al desplazamiento sobre la masa de prueba. La fuerza ejercida por el resorte empuja la masa de prueba hacia la derecha y la hace acelerar en la dirección de la fuerza externa.
Si se eligen valores apropiados para los diferentes parámetros del sistema, el desplazamiento de la masa de prueba será proporcional al valor de la aceleración del cuadro (después de que la respuesta transitoria del sistema se extinga).
En resumen, una estructura de amortiguador de resorte de masa convierte la aceleración del marco del sensor en el desplazamiento de masa de prueba. La pregunta restante es, ¿cómo podemos medir este desplazamiento?
Medición del desplazamiento de masa de prueba:enfoque de detección capacitiva
El desplazamiento de la masa de prueba se puede medir por varios medios. Un método común es el enfoque de detección capacitiva que se muestra en la Figura 3.
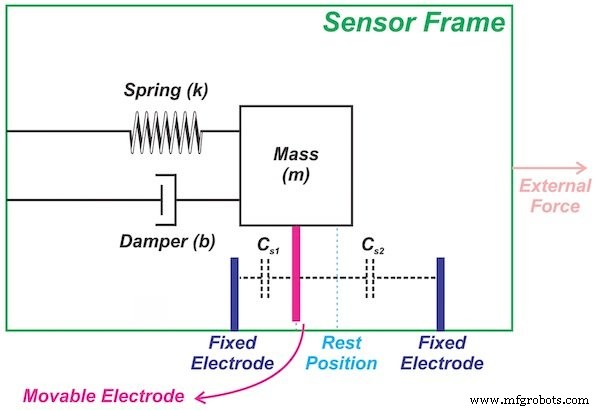
Figura 3
Hay dos electrodos fijados al marco del sensor junto con un electrodo móvil conectado a la masa de prueba. Esto crea dos condensadores, C s1 y C s2 , como se muestra en la Figura 3.
A medida que la masa de prueba se mueve en una dirección, la capacitancia entre el electrodo móvil y uno de los electrodos fijos aumenta mientras que la capacitancia del otro capacitor disminuye. Es por eso que solo necesitamos medir los cambios en los capacitores de detección para detectar el desplazamiento de la masa de prueba, que es proporcional a la aceleración de entrada.
Acondicionamiento de la señal del acelerómetro mediante demodulación síncrona
Para medir con precisión los cambios en los capacitores de detección, podemos aplicar la técnica de demodulación síncrona. La Figura 4 muestra una versión simplificada del acondicionamiento de señal empleado en la familia ADXL de acelerómetros de Analog Devices.
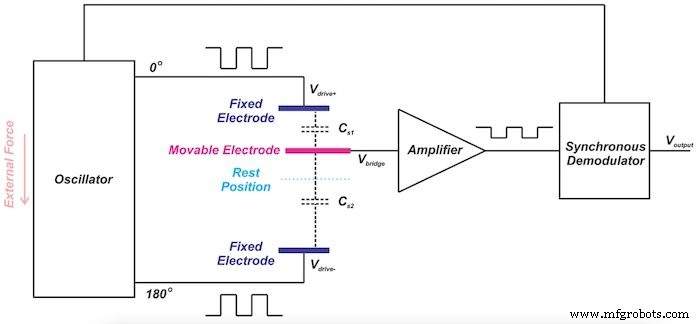
Figura 4. Imagen (adaptada) cortesía de Analog Devices
En este caso, se utiliza una onda cuadrada de 1 MHz como excitación de CA de los condensadores de detección C s1 y C s2 . Las ondas cuadradas aplicadas a los electrodos fijos tienen la misma amplitud pero están desfasadas 180 ° entre sí. Cuando el electrodo móvil está en su posición de reposo, el voltaje en la entrada del amplificador es cero voltios.
Cuando el electrodo móvil se acerca a uno de los electrodos fijos, una porción más grande del voltaje de excitación de ese electrodo aparece en la entrada del amplificador V puente , lo que significa que la onda cuadrada que aparece en la entrada del amplificador está en fase con el voltaje de excitación del electrodo más cercano.
Por ejemplo, en la Figura 4, la salida amplificada es una onda cuadrada en fase con V drive + porque C s1 es más grande que C s2 .
La amplitud del puente V es una función del desplazamiento de la masa de prueba; sin embargo, también necesitamos conocer la relación de fase del puente V con respecto a V unidad + y V unidad- para determinar en qué dirección se desplaza la masa de prueba.
El demodulador síncrono básicamente multiplica la salida del amplificador por el voltaje de excitación (ya sea V drive + o V unidad- ) para convertir la onda cuadrada en la salida del amplificador a un voltaje de CC que revela la cantidad de desplazamiento y su dirección.
Para saber cómo la demodulación síncrona logra esto, consulte mi artículo sobre técnicas de demodulación LVDT:Demodulación LVDT:tipo rectificador frente a demodulación síncrona.
¿Por qué no utilizamos un condensador de detección única?
La detección capacitiva, que se muestra en la Figura 3, tiene una naturaleza diferencial:cuando C s1 aumenta, C s2 disminuye y viceversa.
También es posible emplear detección capacitiva de un solo extremo donde se omite uno de los electrodos fijos, por lo tanto, solo hay un capacitor variable. En este caso, podemos modelar el sistema como se muestra en la Figura 5.
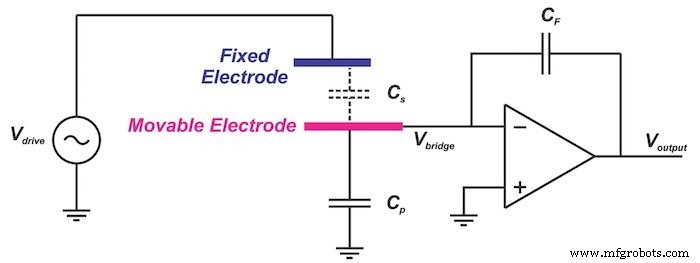
Figura 5
Esta versión de un solo extremo parece ser una solución más simple. Entonces, ¿por qué no usamos un solo capacitor sensor?
Estructura de condensador de detección única:salida no lineal
Examinemos este circuito más de cerca.
En la figura anterior, C p modela la capacitancia parásita total desde el electrodo móvil hasta el suelo. Idealmente, V puente está en el terreno virtual y podemos ignorar C p porque tiene terreno en un lado y terreno virtual en el otro lado.
Por lo tanto, la salida se puede obtener simplemente como:
\ [V_ {salida} =- \ frac {C_s} {C_F} V_ {drive} \]
Ecuación 1
Tenga en cuenta que la ruta de la corriente de polarización no se muestra en la Figura 5. Usando la ecuación básica del capacitor, podemos expresar la salida en términos del desplazamiento de la masa de prueba.
Para un condensador C, tenemos:
\ [C =\ epsilon \ frac {A} {d} \]
Ecuación 2
donde ε es la permitividad dieléctrica, A es el área de la placa paralela yd es la distancia entre las dos placas conductoras. Para simplificar, suponga que los dos condensadores C s y C F tienen los mismos ε y A.
Entonces, la ecuación 1 se puede simplificar a:
\ [V_ {salida} =- \ frac {d_F} {d_s} V_ {drive} \]
donde d F y d s denotar la distancia entre los electrodos de C F y C s , respectivamente. d s se puede expresar como la suma de una distancia inicial d 0 y el valor de desplazamiento Δd.
De ahí podemos obtener:
\ [V_ {salida} =- \ frac {d_F} {d_0 + \ Delta d} V_ {unidad} \]
Como puede ver, el término de desplazamiento (Δd) está en el denominador de la ecuación de salida. Por lo tanto, la salida es una función no lineal del desplazamiento de masa de prueba Δd.
Estructura diferencial:salida lineal
Examinemos la función de transferencia de la detección capacitiva diferencial representada en la Figura 4.
Puede verificar que, con detección capacitiva diferencial, V puente viene dado por:
\ [V_ {bridge} =\ frac {C_ {s1} V_ {drive +} + C_ {s2} V_ {drive -}} {C_ {s1} + C_ {s2 }} \]
Aplicando la Ecuación 2 y asumiendo que los dos condensadores C s1 y C s2 tienen los mismos valores de ε y A, obtenemos:
\ [V_ {bridge} =\ frac {d_ {s2} V_ {drive +} + s_ {s1} V_ {drive -}} {d_ {s1} + d_ {s2 }} \]
Ecuación 3
donde d s1 y d s2 denotar la distancia entre los electrodos de C s1 y C s2 , respectivamente. Cuando d s1 aumenta, d s2 disminuye en la misma cantidad y viceversa.
Suponiendo que:
\ [d_ {s1} =d_0 - \ Delta d \]
\ [d_ {s2} =d_0 + \ Delta d \]
\ [V_ {drive +} =- V_ {drive-} \]
La ecuación 3 se simplifica a:
\ [V_ {bridge} =\ frac {\ Delta d} {d_0} V_ {drive +} \]
Como puede ver, con una estructura diferencial, el voltaje de salida es una función lineal del desplazamiento de masa de prueba Δd. Tenga en cuenta que, aunque podríamos usar software para eliminar los errores de linealidad del sensor, es deseable tener una respuesta lineal ya que aumenta la precisión de la medición y facilita la calibración del sistema.
Conclusión
Vimos cómo una estructura de masa-resorte-amortiguador puede convertir la aceleración en una cantidad de desplazamiento y cómo se puede aplicar el enfoque de detección capacitiva para convertir este desplazamiento en una señal eléctrica proporcional a la aceleración aplicada.
También mencionamos brevemente que, para que el desplazamiento de la masa de prueba sea proporcional a la aceleración aplicada, se deben elegir adecuadamente diferentes parámetros del sistema masa-resorte-amortiguador.
En el próximo artículo, derivaremos la función de transferencia del sistema masa-resorte-amortiguador para obtener una visión más profunda del funcionamiento del sistema.
Para ver una lista completa de mis artículos, visite esta página.
Sensor
- Introducción a la impresión 3D con plásticos
- Introducción a la impresión 3D con sinterización selectiva por láser
- Truphone permite implementaciones masivas de IoT con iSim Collaboration
- Würth:sensor de aceleración de 3 ejes con funcionalidades preestablecidas
- Medición de temperatura con RASPBERRY PI
- ¿No puede hacer frente a una gran cantidad de quejas de clientes? IA al rescate
- Detección táctil universal con conductores acoplados electromecánicamente
- Acelerómetro basado en luz láser
- ¿Velocidad o aceleración? ¿Qué es más importante con el corte por chorro de agua?
- Introducción a la soldadora por puntos de descarga capacitiva
- Introducción al preconfigurador de herramientas CNC y medición de herramientas CNC