


Demodulación LVDT:tipo rectificador frente a demodulación síncrona
Aprenda cómo se comparan dos métodos de demodulación:demodulación síncrona y demodulación de tipo rectificador. Aquí discutimos las ventajas, los inconvenientes y las aplicaciones adecuadas de cada método.
En un artículo anterior, discutimos el funcionamiento y los desafíos de un demodulador de rectificador de diodo. En este artículo, primero veremos las limitaciones de los demoduladores de tipo rectificador en general. Luego, veremos que un demodulador síncrono puede solucionar algunos de estos problemas. Finalmente, veremos las desventajas de la demodulación síncrona en aplicaciones LVDT.
Limitaciones de los demoduladores de tipo rectificador
Aunque un rectificador de precisión puede solucionar los desafíos de un rectificador de diodo simple, los demoduladores de tipo rectificador tienen varias desventajas en general. Con un demodulador de tipo rectificador, necesitamos acceso a la toma central del secundario LVDT para rectificar el voltaje en cada uno de los devanados secundarios. Por lo tanto, este tipo de demodulación solo es aplicable a LVDT de 5 cables (Figura 1 (b)).
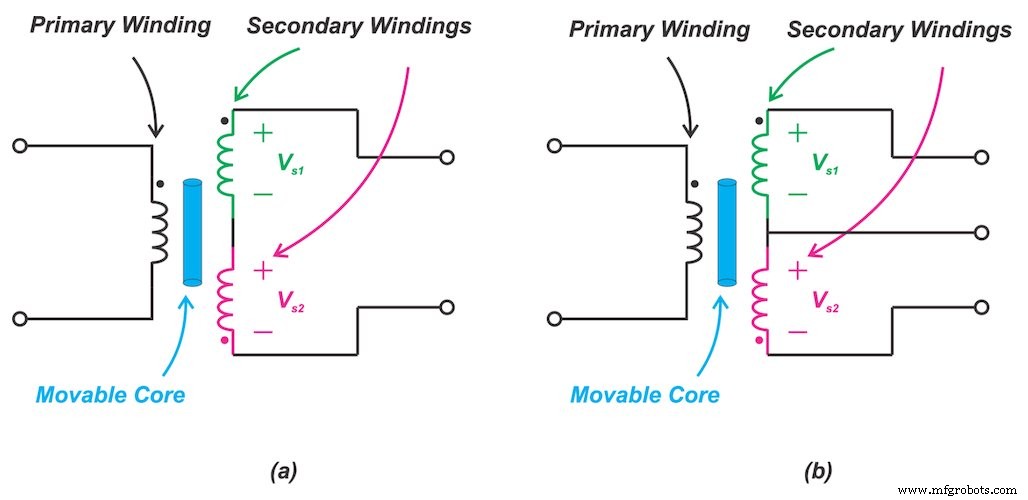
Figura 1. (a) 4 hilos y (b) LVDT de 5 hilos.
Hay otros métodos de demodulación que no necesitan acceso a la toma central y pueden determinar la posición del núcleo procesando la diferencia de voltaje entre los dos secundarios. Estos demoduladores nos permiten emplear un LVDT de 4 cables como se muestra en la Figura 1 (a).
¿Es realmente importante tener el número mínimo de conexiones eléctricas?
Hay muchas aplicaciones en las que el circuito de acondicionamiento se encuentra a una gran distancia del sensor. Un buen ejemplo es la realización de mediciones en entornos hostiles de aplicaciones radiactivas donde los circuitos de acondicionamiento deben colocarse en áreas seguras, incluso hasta varios cientos de metros de distancia del LVDT. En estos casos, puede resultar difícil transmitir los dos voltajes secundarios a una larga distancia a través de una configuración de 5 cables. Con el módulo de acondicionamiento ubicado lejos del LVDT, es necesario tener un cableado bien balanceado con baja capacitancia distribuida. Esto significa un aumento considerable en el costo del cableado.
Otra desventaja de un demodulador de tipo rectificador es su rechazo limitado de ruido. Considere un sensor LVDT con el desplazamiento del núcleo siguiendo una forma de onda sinusoidal a 250 Hz. La curva roja en la Figura 2 muestra la salida demodulada de este LVDT obtenida usando un rectificador de diodo típico.
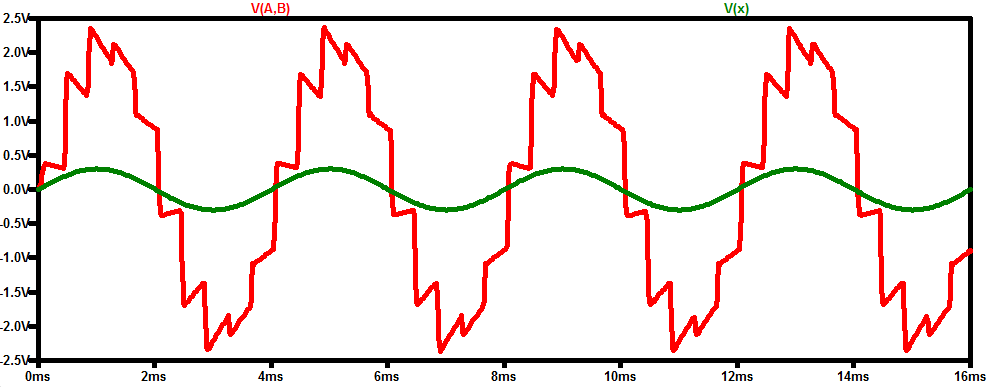
Figura 2.
En esta figura, la curva verde muestra el desplazamiento del núcleo x. Como puede ver, la señal de salida parece la versión amplificada de x excepto que tiene algunos cambios abruptos correspondientes a algunos componentes de alta frecuencia.
Para deshacernos de estos componentes de alta frecuencia no deseados, podemos utilizar un filtro de paso bajo con una frecuencia de corte ligeramente superior al ancho de banda mecánico del sistema (250 Hz). Por lo tanto, incluso con un filtro de paso bajo ideal, todos los componentes de frecuencia hasta 250 Hz pasarán el filtro sin ser atenuados. Por lo tanto, cualquier componente de ruido por debajo de 250 Hz que se acople a la salida del sensor también aparecerá en la salida del demodulador.
Un rendimiento de ruido deficiente es un inconveniente importante de los demoduladores de tipo rectificador. Esta limitación se vuelve aún más pronunciada con cables largos. El rendimiento de ruido junto con el requisito de configuración de 5 hilos hacen que este circuito no sea adecuado para tramos largos de cables a ubicaciones remotas. La demodulación síncrona que se analiza a continuación puede solucionar estos dos problemas.
Demodulación síncrona
Considere el LVDT que se muestra en la Figura 3. Suponga que tenemos \ [V_ {EXC} =A_p \ cos (2 \ pi \ times f_p \ times t) \].
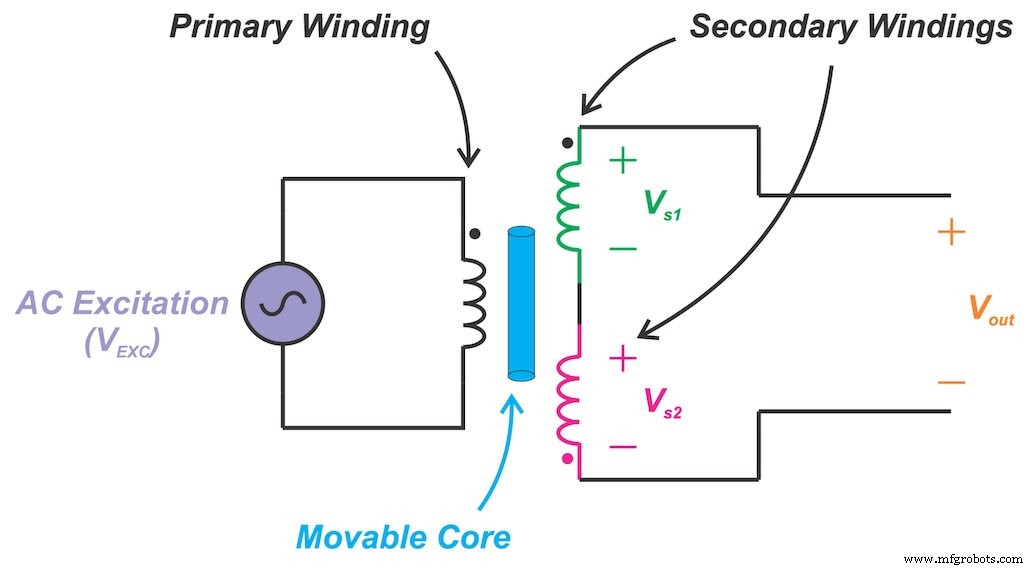
Figura 3. Un ejemplo de LVDT
La salida diferencial (\ [V_ {out} \]) es una señal modulada en amplitud y se puede expresar como:
\ [V_ {out} =A_s \ times x \ times \ cos (2 \ pi \ times f_p \ times t + \ phi) \]
Ecuación 1.
donde x es el desplazamiento del núcleo y \ [A_s \] es un factor de escala que da la amplitud de salida general para una x dada. El término de fase \ [\ phi \] es la diferencia de fase causada por el LVDT entre los voltajes primario y secundario. Este cambio de fase debería ser idealmente muy pequeño, especialmente alrededor de una frecuencia específica dada por el fabricante. Sin embargo, normalmente debemos tener en cuenta este cambio de fase.
La técnica de demodulación sincrónica multiplica la salida diferencial del LVDT por la señal de excitación (o una señal sincrónica con la señal de excitación en general). Esto da:
\ [V_ {demod} =V_ {out} \ times V_ {EXC} =A_s \ times x \ times \ cos (2 \ pi \ times f_p \ times t + \ phi) \ times A_p \ cos (2 \ pi \ times f_p \ times t) \]
Ecuación 2.
que se simplifica a:
\ [V_ {demod} =\ frac {1} {2} \ times A_s \ times x \ times A_p [\ cos (\ phi) + \ cos (2 \ pi \ times 2f_p \ times t + \ phi)] \]
El primer término dentro de los corchetes es DC, sin embargo, el segundo término está al doble de la frecuencia de excitación. Por lo tanto, un filtro de paso bajo estrecho puede eliminar el segundo término y tenemos:
\ [V_ {filtrado} =\ frac {1} {2} \ times A_s \ times x \ times A_p \ cos (\ phi) \]
Ecuación 3.
Esto nos da un voltaje de CC proporcional al desplazamiento del núcleo x.
Demodulación síncrona mediante la multiplicación por una onda cuadrada
Podemos usar un multiplicador analógico para multiplicar la salida LVDT por la onda sinusoidal de excitación (Ecuación 2); sin embargo, los multiplicadores analógicos son costosos y tienen limitaciones de linealidad. En lugar de multiplicar por una onda sinusoidal, podemos multiplicar la señal por una onda cuadrada sincrónica con la entrada de excitación.
Quizás se pregunte cómo se puede usar una onda cuadrada en lugar de una sinusoidal. Una onda cuadrada que alterna entre ± 1 se puede expresar como una suma infinita de sinusoides en los armónicos impares de la frecuencia de onda cuadrada. Por lo tanto, una onda cuadrada de frecuencia \ [f_p \] se puede expresar como:
\ [v_ {squarewave} (t) =\ sum_ {n =1, 3, 5} ^ {\ infty} \ frac {4} {n \ pi} \ sin (2 \ pi \ veces nf_p \ veces t) \]
Cuando la salida LVDT (una sinusoidal en \ [f_p \]) se multiplica por la onda cuadrada, el componente fundamental de la onda cuadrada \ [(\ frac {4} {\ pi} \ sin (2 \ pi \ times f_p \ multiplicado por t)) \] produce un componente de CC así como un componente de alta frecuencia en \ [2f_p \]. El componente de alta frecuencia será suprimido por un filtro de paso bajo como se explicó en la sección anterior y el componente de CC que es el deseado aparecerá en la salida.
La multiplicación por los armónicos de orden superior de la onda cuadrada producirá componentes de alta frecuencia en múltiplos pares de \ [f_p \]. Por lo tanto, el componente de CC es el único que aparece en la salida del filtro al igual que en el caso de multiplicar la señal por una sinusoidal. La principal ventaja de multiplicar por una onda cuadrada es que puede simplificar significativamente la implementación del circuito del demodulador.
Implementación de circuito de un demodulador síncrono
El demodulador síncrono basado en ondas cuadradas se muestra en la Figura 4.
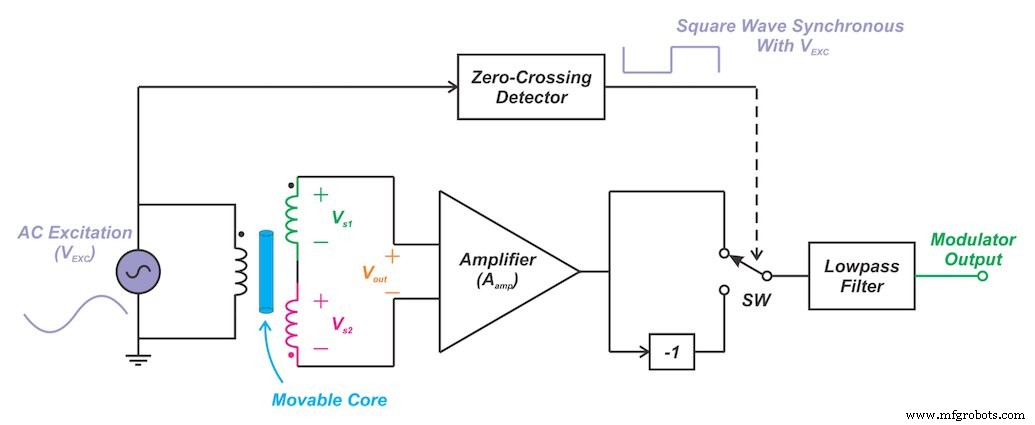
Figura 4. Un demodulador síncrono basado en ondas cuadradas
En este caso, la versión amplificada de la salida LVDT se multiplica por una onda cuadrada en lugar de la excitación sinusoidal. La onda cuadrada es sincrónica con la entrada de excitación y se obtiene a través de un "Detector de cruce por cero" como se muestra en el diagrama de bloques anterior.
Para realizar la multiplicación por una onda cuadrada, la ganancia de la cadena de señal se cambia periódicamente entre \ [± A_ {amp} \] (\ [A_ {amp} \] es la ganancia del amplificador). Tenga en cuenta que la ruta inferior incorpora una ganancia de -1. Esto se logra usando la onda cuadrada para impulsar el interruptor SW que cambia la ruta de la señal entre la ruta superior e inferior. Esto equivale efectivamente a multiplicar la salida del amplificador por la onda cuadrada.
Finalmente, se utiliza un filtro de paso bajo para mantener el término de CC de la salida y suprimir los componentes de alta frecuencia.
Las ventajas de los demoduladores síncronos LVDT
La principal ventaja de la demodulación síncrona es su rendimiento de ruido. Como se discutió anteriormente, la frecuencia de demodulación síncrona cambia la salida del LVDT a CC y usa un filtro de paso bajo para mantener este componente de CC. El filtro de paso bajo suprimirá todos los componentes de ruido fuera de su banda de paso.
Dado que nuestra señal deseada está en CC, podemos usar un filtro de paso bajo estrecho. Esto limitará el ancho de banda del sistema y permitirá que el demodulador suprima significativamente una gran parte del ruido que se acopla a la salida LVDT. Además, con la demodulación síncrona, podemos utilizar un LVDT de 4 hilos.
Las desventajas de los demoduladores síncronos LVDT
Aunque la demodulación síncrona puede ofrecer una mayor inmunidad al ruido en comparación con los demoduladores de tipo rectificador, su salida depende de la amplitud del voltaje de excitación (\ [A_p \] en la Ecuación 3). Por lo tanto, con la demodulación síncrona, la estabilidad de amplitud de la entrada de excitación es crítica.
Otro problema es que la salida del demodulador depende del cambio de fase de la función de transferencia LVDT (\ [\ cos (\ phi) \] en la Ecuación 3). Este cambio de fase debería ser idealmente muy pequeño; sin embargo, no es constante y puede cambiar con el punto de operación. Los circuitos demoduladores prácticos comúnmente emplean una red de compensación de fase para ajustar la fase de la onda cuadrada producida. La red de compensación puede aumentar la complejidad del demodulador.
Sin embargo, esta mayor complejidad hace que el circuito sea adecuado para cables relativamente más largos en comparación con los demoduladores de tipo rectificador. Esto se debe al hecho de que el término de cambio de fase \ [\ phi \] puede usarse para tomar en cuenta el retraso causado por el cableado. Por lo tanto, el circuito de compensación de fase también se puede usar para compensar el retraso del cable y hacer que el circuito sea adecuado para cables más largos.
Otras técnicas de demodulación
La demodulación síncrona ofrece una mayor inmunidad al ruido y solo requiere cuatro conexiones eléctricas; sin embargo, tiene sus propias limitaciones, como la dependencia de la amplitud de la entrada de excitación, así como el problema del cambio de fase. Para abordar estos problemas, existen varias otras técnicas de demodulación. Estas técnicas suelen emplear conceptos de medición radiométrica y métodos basados en DSP para sortear la limitación de los demoduladores síncronos.
Para una discusión más detallada de la demodulación síncrona cuando se aplica a otros tipos de sensores, consulte los siguientes artículos:
- Introducción a la demodulación síncrona
- Demodulación síncrona mediante multiplicadores analógicos frente a multiplicadores basados en conmutadores
- Implementación analógica y digital de un demodulador síncrono
Para ver una lista completa de mis artículos, visite esta página.
Tecnología de Internet de las cosas
- Software Open DDS vs.RTI DDS
- Dentro de los vehículos autónomos del mañana:de la prueba de concepto a la realidad
- DDS Security the Hard (ware) Way - SGX Part 3:Hardened DDS Services
- DDS Security the Hard (ware) Way - SGX:Part 2 (Micro + Security + SCONE)
- DDS Security the Hard (ware) Way - SGX:Part 1 (Overview)
- MQTT y DDS:comunicación de máquina a máquina en IoT
- ¿Qué es IIoT? Introducción a la Internet industrial de las cosas
- Pruebas de software en RTI
- Complemento Telegraf para Connext DDS:cree un sistema de monitoreo de series temporales con DDS e InfluxDB
- Connext 6:¡Ya disponible!
- Los tornos CNC cuentan con tecnología de husillo síncrono