


ROS2 + DDS:Tócalo de nuevo
Para volver a reproducir los datos grabados en ROS2: Resultados Ahora he recopilado datos ROS2 LiDAR, generados durante una serie de sesiones de simulador automático, y todos se pueden reproducir a pedido, como se esperaba:
¡Genial! Ahora puedo reproducir datos LiDAR bajo demanda sin necesidad de un simulador automotriz dedicado (o vehículo real). Fue divertido jugar con el Para obtener más información sobre ROS2 y DDS, consulte las publicaciones anteriores del blog de RTI: Una guía práctica para la interoperabilidad y cuándo se fusionan los ecosistemas
* ->
rtireplay -cfgFile ros2_replay.xml -cfgName simple_example 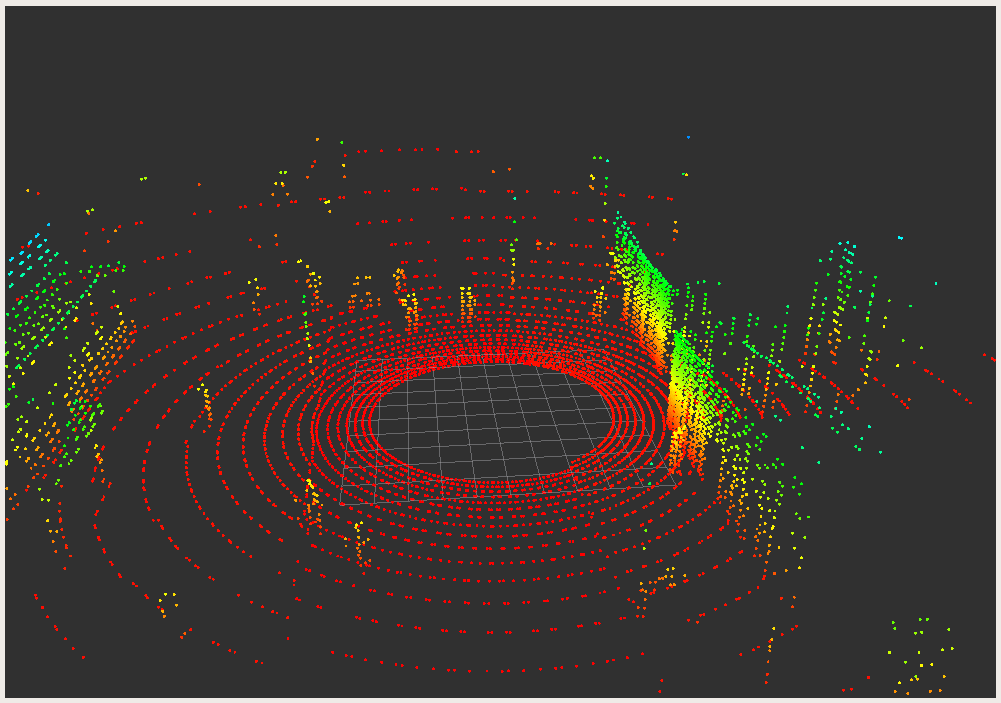
variable en el archivo XML de reproducción para acelerar la reproducción de los datos LiDAR. ¡Era como ser un pasajero en un coche * muy * rápido!
Tecnología de Internet de las cosas
- Software Open DDS vs.RTI DDS
- MQTT y DDS:comunicación de máquina a máquina en IoT
- Connext DDS y el IoT industrial:las cinco cosas principales que debe saber
- ROS2 + DDS:una guía de campo para la interoperabilidad
- La Cuarta Revolución Industrial
- Mantener la conformidad de los datos en IoT
- ¡¿Qué hago con los datos ?!
- Democratizando el IoT
- 5 Tendencias en la conectividad
- Las 10 mejores plataformas de IIoT
- El futuro de los centros de datos