


IMU MEMS de próxima generación:alto rendimiento, escalable
Para averiguar qué se avecina para los sistemas de navegación de automóviles MEMS, entrevisté a Yang Zhao, director ejecutivo, y a Teoman Ustun, vicepresidente de marketing y desarrollo empresarial de ACEINNA, Inc. (Boston, MA).
Resúmenes técnicos: ¿Por qué llamas a las IMU de ACEINNA de próxima generación?
Yang Zhao: En condiciones ideales, puede conducir un automóvil con una cámara. Pero para lograr seguridad y disponibilidad en todo momento, los vehículos autónomos dependen cada vez más de tecnologías de sensores adicionales. Sin embargo, esos sensores como Vision, Radar, Lidar, GNSS, RTK pueden cegarse en ciertas situaciones. IMU es el único sensor que continúa funcionando incluso cuando todos los demás sensores fallan. Nuestro desafío es aumentar la cantidad de tiempo durante el cual la navegación a estima con la IMU será confiable. El producto actual que tenemos es más como un nivel industrial de gama alta pero diseñado para ser incorporado a las tarjetas de pasajeros.
Teomán Ustún: La revolucionaria tecnología MEMS que estamos desarrollando logrará el rendimiento de un giroscopio de fibra óptica al precio de una solución MEMS de silicio. Esa es básicamente una tecnología que cambia el juego.
Con cada generación, hemos mejorado el rendimiento de nuestra IMU en términos de Angular Random Walk (ARW), inestabilidad de polarización e inmunidad a vibraciones/golpes. Con esta última generación también agregamos una arquitectura triple redundante, que es extremadamente importante por dos razones. Mejora la confiabilidad a nivel automotriz y también aumenta el rendimiento de la IMU. Por ejemplo, que yo sepa, tenemos el único INS (sistema de navegación inercial) calificado con ASIL-B ISO 26262 (Nivel de integridad de seguridad automotriz) integrado con IMU triple redundante en el mercado. Esta calificación básicamente brinda a los clientes automotrices la confianza de que nuestro sensor generará datos de manera sólida durante la vida útil del vehículo.
Nuestras IMU más nuevas también tienen características de arquitectura abierta que permiten a nuestros clientes aprovechar su conocimiento o implementar su salsa secreta en nuestro hardware.
Zhao: Las IMU de grado aeroespacial tienen una estabilidad excelente, pero son grandes, pesadas y costosas; consulte la Figura 1 para ver una comparación de los diferentes grados de IMU. Nuestro objetivo es traer al mercado un sistema IMU que se acerque al grado de navegación. Hoy en día, puede obtener IMU de grado de navegación, pero todos usan giroscopios de fibra óptica y están en el rango de precios de decenas de miles de dólares. Son grandes, pesados y costosos, pero en aviónica y militar, eso no es un factor decisivo.
Pero cuando hablas de usar una IMU en un automóvil, nadie pagaría esa cantidad de dinero. Entonces, lo que estamos tratando de hacer es desarrollar una tecnología IMU MEMS de nueva generación que pueda alcanzar un rendimiento de grado de navegación, que pueda acercarse a los niveles de rendimiento del giroscopio de fibra óptica. A diferencia de otros que inicialmente se enfocaron en las IMU de consumo y ahora están tratando de cambiarlas a aplicaciones de mayor rendimiento, comenzamos con aplicaciones de grado industrial de alto rendimiento en mente para establecer los requisitos para nuestro sensor de automóvil.
Los productos automotrices más recientes que presentamos son rentables. Están muy diseñados y desarrollados de abajo hacia arriba para tener una optimización de precio/rendimiento para aplicaciones de gran volumen. Nuestro objetivo es un precio de menos de $ 500 y, eventualmente, incluso menos.
Resúmenes técnicos: ¿Podría explicar algunas de las funciones que mejoran la precisión, la estabilidad y la confiabilidad de su nueva IMU?
Ustún: En primer lugar, nuestros sensores IMU tienen triple redundancia:hay tres acelerómetros y tres giroscopios. Supervisamos todos los parámetros críticos, incluidos voltajes, corrientes y temperaturas, así como el rendimiento de las IMU individuales. Tener esta triple redundancia nos permite implementar autocomprobaciones continuas. Obtenemos una buena confianza sobre el rendimiento del giroscopio y el acelerómetro comparando y contrastando este triple flujo de datos.

También tenemos seis grados de libertad:los tres acelerómetros y los tres giroscopios miden los ejes XYZ. Los giroscopios miden la velocidad de rotación, que cuando se integra, da un cambio en la posición angular. El acelerómetro mide la aceleración, que cuando se integra da la velocidad y cuando se vuelve a integrar da la posición. Al procesar datos de giroscopios y datos de acelerómetros, y usar filtros y algoritmos optimizados para una aplicación determinada, obtenemos datos angulares realmente precisos para balanceo, cabeceo y guiñada (consulte la Figura 2). El dato más crítico para una aplicación automotriz es la guiñada, que indica el grado de deriva del automóvil. El paso indica si estás subiendo o bajando una colina. Con suerte, nunca verá un vuelco en su automóvil.
Resúmenes técnicos: ¿Qué tipo de precisión podría mantener durante qué período de tiempo?
Ustún: Eso es muy difícil de decir porque depende de tantos escenarios diferentes. Actualmente tenemos que lograr la precisión de nivel de carril. Un carril tiene unos tres metros de ancho y un automóvil de pasajeros tiene unos dos metros de ancho. Dado que desea asegurarse de que no va más allá del carril, tiene más o menos medio metro antes de desviarse demasiado. A las velocidades típicas de los automóviles, se podría lograr una corrección de medio metro en menos de un segundo. Dado que, en navegación a estima, puede mantener la precisión requerida durante 60 a 90 segundos, nuestra IMU puede mantener fácilmente un automóvil dentro de su carril.
Resúmenes técnicos: Entonces, una IMU le brinda una precisión relativa. ¿Qué pasa con la precisión absoluta?
Ustún: Los datos de ubicación absoluta generalmente se derivan de una señal GNSS. Históricamente, la precisión posicional de los receptores GNSS ha sido de un metro o más. Por lo tanto, GNSS por sí solo no es lo suficientemente bueno para la precisión de nivel de carril de automóvil requerida de hasta 2 cm.
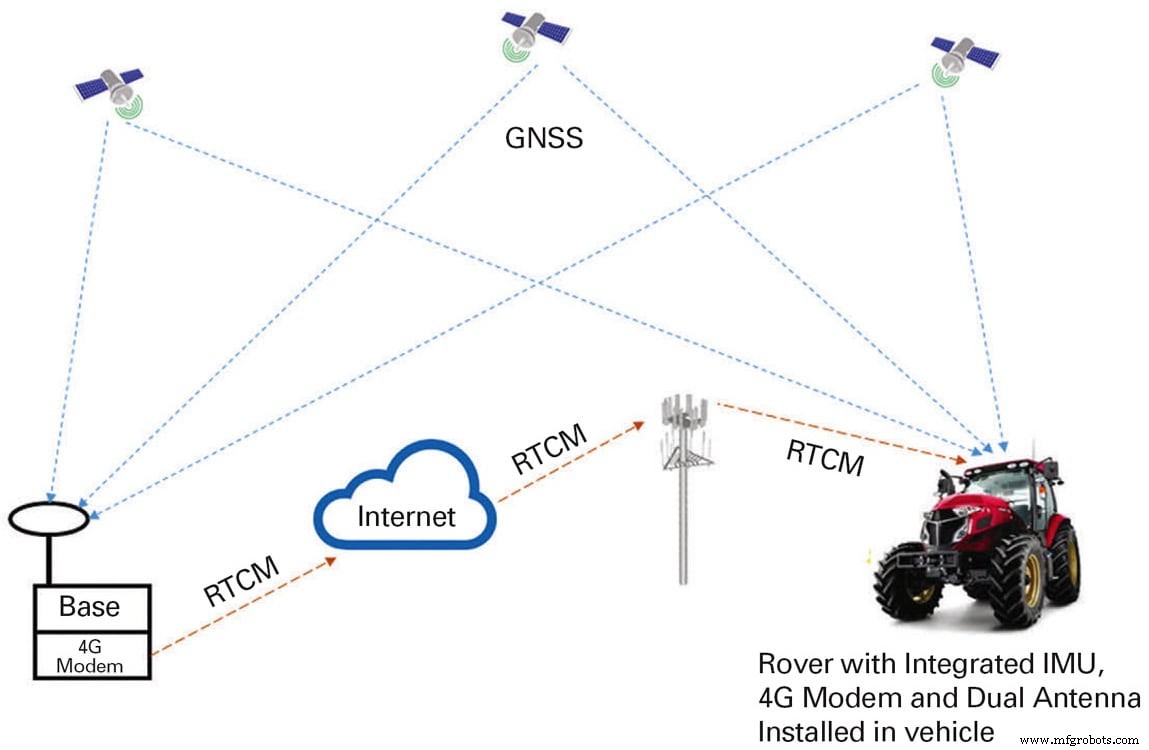
La cinemática en tiempo real (RTK) es una técnica para mejorar la precisión posicional de un receptor GNSS. Utiliza una red de estaciones base que pueden enviar correcciones a nuestro motor de posicionamiento RTK montado en el vehículo, que las utiliza para volver a calcular su posición con mayor precisión.
RTK es un servicio que puede comprar o suscribirse de muchas fuentes. Lo que estamos viendo cada vez más es la infraestructura de comunicación, incluso los proveedores de servicios de telecomunicaciones como Verizon, Softbank o China Mobile, han comenzado a ofrecer servicios RTK. Desde la perspectiva de nuestro producto, somos independientes del proveedor de servicios:tenemos la intención de respaldar a todos y cada uno de esos proveedores de servicios RTK para ayudar a nuestros clientes a alcanzar los límites de precisión que buscan. Brindamos una solución que es tanto de hardware como de software.
Aunque no brindamos el servicio, permitimos que nuestros clientes elijan el que más les convenga. Sin embargo, calificamos esos servicios primero. Nos aseguramos de que sean compatibles con nuestro hardware y software. Y luego lo colocamos en nuestro sitio web para brindarles a los clientes la flexibilidad de elegir de una lista de proveedores de servicios. Más comúnmente, RTK viene como un servicio a través de una red 4G LTE. Si no hay recepción 4G LTE, existen formas alternativas de recibir las señales de corrección, como la comunicación por satélite.
Para RTK, coloca estaciones base en una red:hay una regla general que generalmente coloca estaciones base en un radio de 50 millas. Estas estaciones base están posicionadas de manera que sus ubicaciones se conocen con mucha precisión. Las correcciones se generan midiendo el error entre la señal GNSS y la ubicación conocida con precisión de una estación base.
Por lo tanto, tenemos una solución integral:un sistema de navegación inercial que incluye nuestra IMU triple redundante de alto rendimiento y seis grados de libertad junto con un receptor GNSS de doble frecuencia, en dos factores de forma diferentes. Uno es un factor de forma de módulo. Si el cliente desea refluir eso en su propia Unidad de control del motor (ECU), puede hacerlo o, de lo contrario, puede usar nuestra solución empaquetada plug and play. Básicamente, solo conecta la antena GPS/GNSS y el sistema funcionará en bus CAN o Ethernet.
Este artículo fue escrito por Ed Brown, editor de Sensor Technology. Para obtener más información, visite aquí .
Sensor
- VersaLogic lanza una computadora integrada de alto rendimiento basada en Xeon
- La unidad de negocios de materiales de alto rendimiento de Lanxess será legalmente independiente
- Tecnología HDPE de barrera de alta humedad para embalaje flexible multicapa
- Etiquetado en molde:alto rendimiento a menor costo
- Aleación de aluminio moldeado por aspersión de alto rendimiento DISPAL S220 F
- Aleación de aluminio moldeado por aspersión de alto rendimiento DISPAL S220 O
- Aleación de aluminio moldeado por pulverización de alto rendimiento DISPAL S225 F
- Aleación de aluminio moldeado por pulverización de alto rendimiento DISPAL S232 T6
- Aleación de aluminio moldeado por pulverización de alto rendimiento DISPAL S232 T6x
- Aleación de aluminio moldeado por pulverización de alto rendimiento DISPAL S250 F
- Aleación de aluminio moldeado por pulverización de alto rendimiento DISPAL S260 F