


Uso de un ADC delta-sigma en sistemas multisensores de alta precisión
Las configuraciones de sensores múltiples para mediciones de petróleo, gas y petróleo adquieren continuamente datos sensibles de presión y térmicos. Sin embargo, capturar las diversas combinaciones de entidades físicas de temperatura y presión requiere un sistema muy conciso y de alta resolución.
Esto es un desafío para los diseñadores, ya que los circuitos del sensor de alta resolución necesarios se extienden a través de amplios rangos de temperatura y presión. En la mayoría de los casos, la electrónica multisensor es demasiado grande para la aplicación de fábrica y el acondicionamiento de señal analógica discreta no es lo suficientemente preciso o resistente (Figura 1).
 Figura 1:Una válvula de seguridad de presión protege los sistemas de tuberías de la sobrepresión. (Fuente:Shutterstock)
Figura 1:Una válvula de seguridad de presión protege los sistemas de tuberías de la sobrepresión. (Fuente:Shutterstock)
La solución a la electrónica multisensor reside en el ADC de alta resolución. La combinación de termopar, detector de temperatura de resistencia (RTD), sensores de presión y convertidor de analógico a digital (ADC) se puede lograr con un ADC delta-sigma (ΔΣ) multicanal y de alta velocidad, donde la especificación clave es ruido RMS. Esto crea un sistema multisensor robusto y de alta precisión para productos electrónicos de petróleo, gas y petróleo.
Este artículo analiza brevemente los problemas asociados con el logro de una interfaz de celda de presión y temperatura precisa utilizando un ΔΣ ADC.
Detección de presión
Los dispositivos de medición de presión son aquellos que requieren excitación eléctrica y aquellos donde la presión es la única fuente de energía. Los dispositivos de estilo mecánico incluyen fuelles, diafragmas, bourdons, tubos y manómetros. Con estos dispositivos, un cambio de presión inicia una reacción mecánica, como un cambio en la posición del brazo mecánico o el nivel de líquido de un tubo.
Los sensores de presión excitados eléctricamente son sinérgicos con los ADC y microcontroladores ΔΣ. Estos sensores pueden ser sensores capacitivos, transformadores diferenciales variables lineales (LVDT) o sensores piezorresistivos. Normalmente, el sensor piezorresistivo es el dispositivo de elección (Figura 2).

Figura 2:Un sensor de presión piezorresistivo (a) suele ser el dispositivo de elección. El lado alto del modelo de puente piezorresistivo (b) requiere una excitación de voltaje o corriente. (Fuente:Maxim Integrated)
En la Figura 2a, la parte superior del sensor fabricado es un material resistivo y la parte inferior es un diafragma. El lado alto del modelo de puente piezorresistivo (Figura 2b) requiere una excitación de voltaje o corriente. La magnitud de la excitación afecta el rango dinámico de la salida del sensor, la diferencia máxima entre V OUT + y V OUT - en un sistema de 3.3 V, que generalmente varía desde decenas de milivoltios hasta varios cientos de milivoltios. La electrónica, que sigue el sensor de puente mediante amplificadores y un ADC, cambia la señal de salida diferencial a representación digital.
Importancia de la detección de temperatura
Existen numerosos tipos de sensores de temperatura que son apropiados para cualquier aplicación en términos de rango de temperatura, linealidad, precisión, robustez y facilidad de uso. Los sensores de temperatura de esta aplicación controlan la temperatura del sensor de presión para garantizar que se produzcan lecturas de presión fiables. Para realizar esta medición de temperatura, esta aplicación utiliza un termopar tipo K y un RTD (Figura 3).
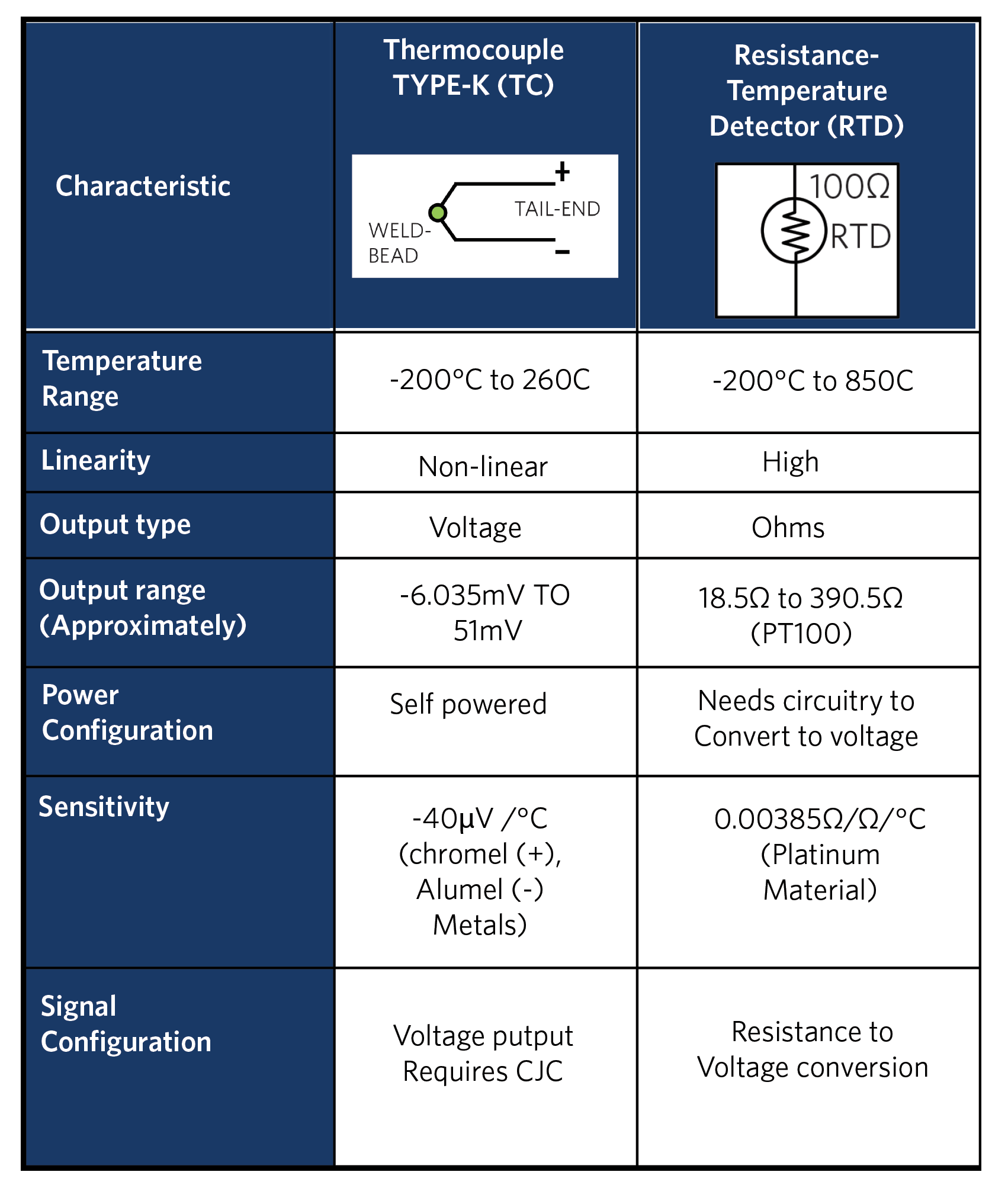 Figura 3:Un termopar TYPE-K de dos conductores requiere una segunda medición de temperatura con el RTD para la compensación de unión fría (CJC). (Fuente:Maxim Integrated)
Figura 3:Un termopar TYPE-K de dos conductores requiere una segunda medición de temperatura con el RTD para la compensación de unión fría (CJC). (Fuente:Maxim Integrated)
En la Figura 3, el robusto sensor de temperatura del termopar puede detectar altas temperaturas de hasta + 1260 ° C, mientras que el RTD mide la temperatura en las uniones de termopar / cobre.
ADC de alta resolución
Con los ADC, existe un compromiso muy fuerte entre resolución y velocidad. De los convertidores más rápidos, el ADC de canalización puede producir velocidades de datos a velocidades de decenas de giga-muestras por segundo (Gsps), mientras produce resoluciones respetables de hasta 12 bits.
El ADC intermedio es el convertidor de registro de aproximación sucesiva (SAR). Este convertidor produce muestras a una salida más lenta que el convertidor de canalización que opera en alrededor de 10 Ksps a 10 Msps y con un aumento en la resolución de hasta 18 bits. El convertidor SAR es un buen caballo de batalla de la industria, si los tamaños aceptables de voltaje de entrada de bits menos significativos (LSB) están en microvoltios (μV). Sin embargo, si la aplicación necesita conversiones de tamaños de LSB en la región de nanovoltios (nV), la única alternativa factible es un ΔΣ ADC (Figura 4).
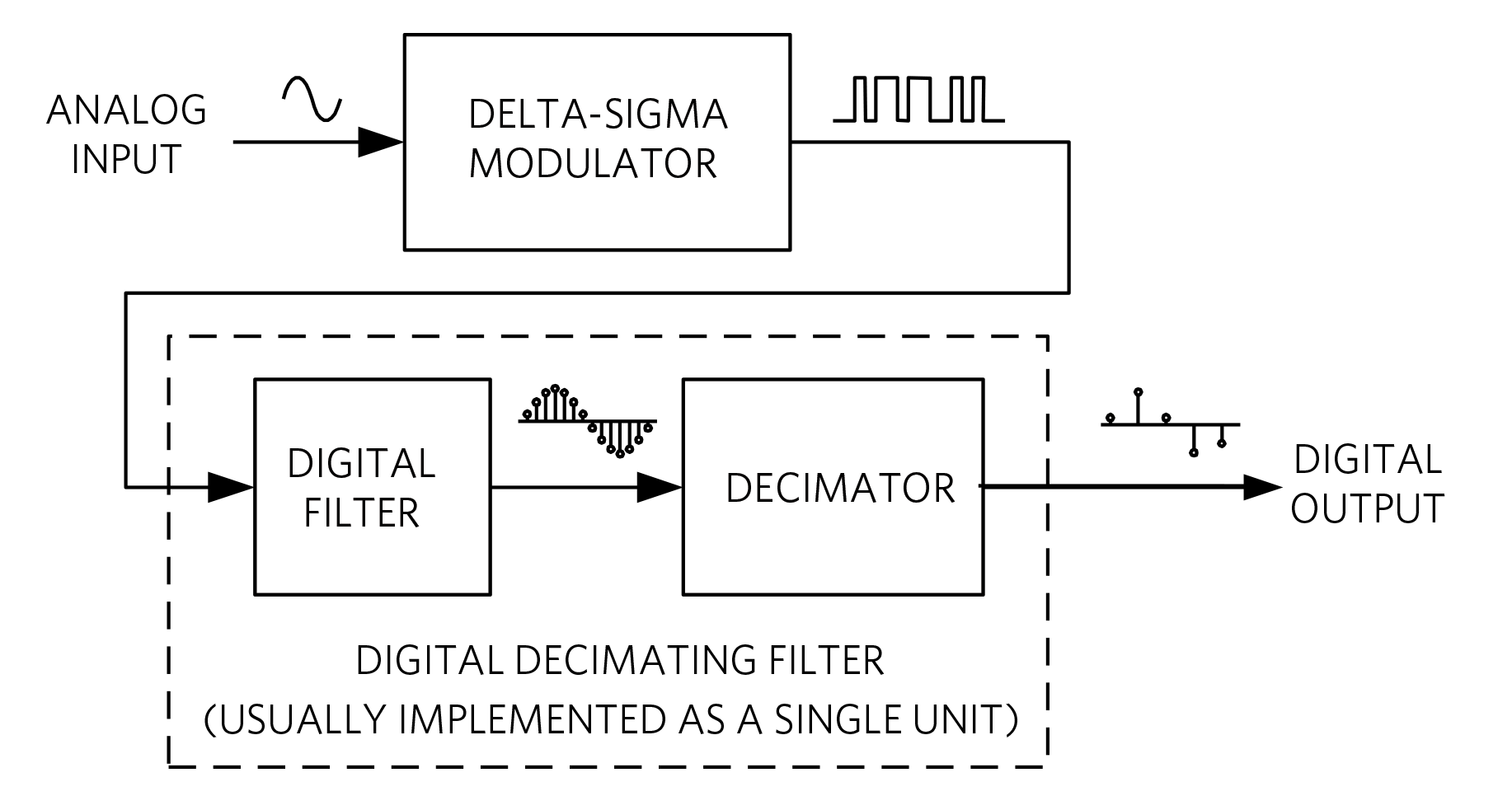 Figura 4:El ADC ΔΣ básico convierte el voltaje de entrada en un modulador ΔΣ. (Fuente:Maxim Integrated)
Figura 4:El ADC ΔΣ básico convierte el voltaje de entrada en un modulador ΔΣ. (Fuente:Maxim Integrated)
El ΔΣ ADC en la Figura 4 convierte el voltaje de entrada en un modulador ΔΣ. El modulador crea un tren de pulsos de un bit con forma de ruido que representa el voltaje de entrada analógica. Luego, el convertidor acumula el tren de pulsos de un bit y, a través del sobremuestreo, realiza una variedad de filtrado digital en la señal. Con el tiempo, el filtro rechaza el ruido de alta frecuencia y produce resultados de múltiples bits de hasta 24 bits. El convertidor envía estos resultados al terminal de salida de un microcontrolador externo.
ΔΣ modulador
El modulador ΔΣ inicia el proceso de reducción de ruido del ADC. Un examen detallado de este modulador revela rápidamente de dónde proviene la etiqueta ΔΣ (Figura 5).
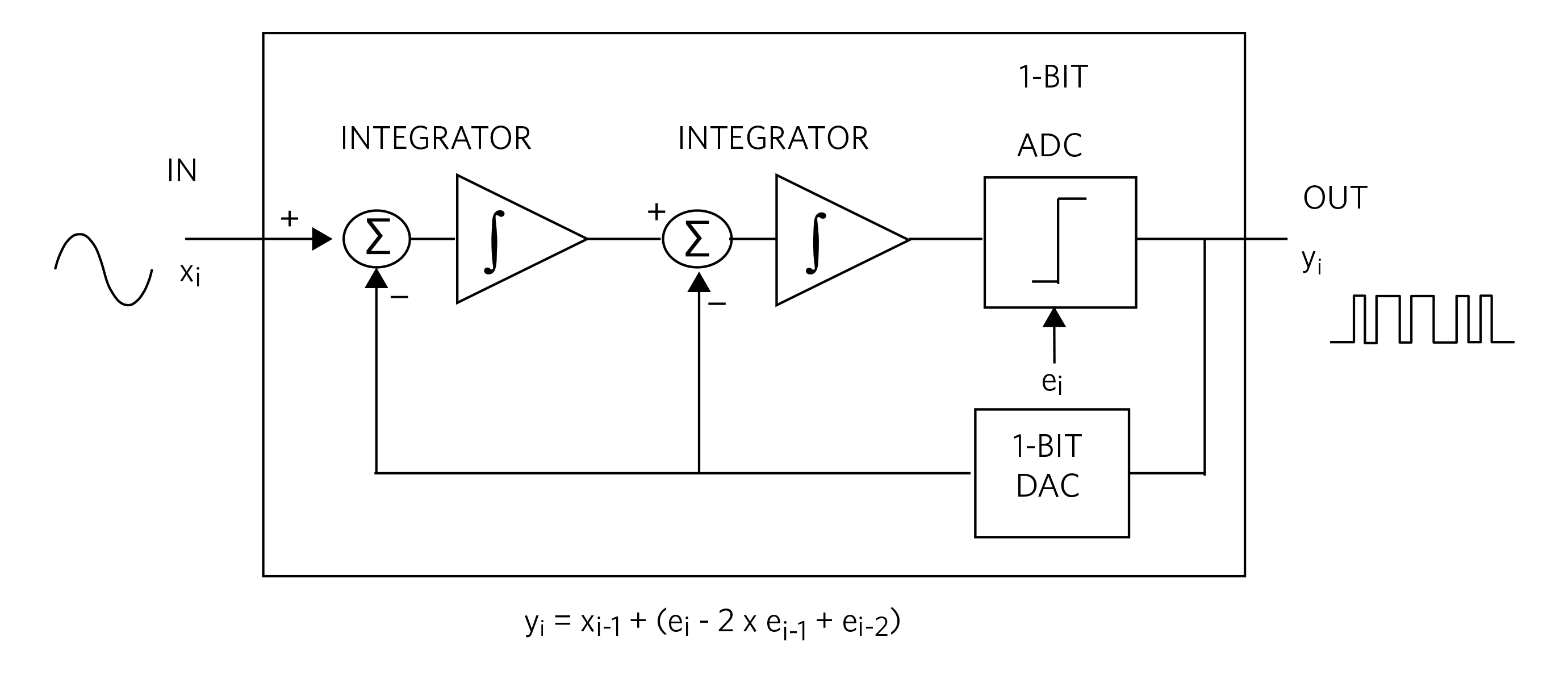 Figura 5:El modulador ΔΣ de segundo orden comprende un sistema de retroalimentación que contiene una función Δ de entrada seguida de dos integradores (función Σ). (Fuente:Maxim Integrated)
Figura 5:El modulador ΔΣ de segundo orden comprende un sistema de retroalimentación que contiene una función Δ de entrada seguida de dos integradores (función Σ). (Fuente:Maxim Integrated)
En la Figura 5, después de los dos integradores, la señal se convierte a través de un ADC de 1 bit con una frecuencia de muestreo equivalente a la frecuencia de muestreo (F S ) y luego retroalimenta a través de un DAC de 1 bit con la misma frecuencia de muestreo a las entradas de los dos integradores. En este sistema, hay una inyección de ruido de cuantificación (e i ) con el ADC de 1 bit. Según la fórmula en la parte inferior de la Figura 5, el ruido aparece en la salida junto con el ruido de conversiones anteriores.
El modulador genera un efecto de modelado de ruido sobre la acumulación de la señal en la salida del modulador. Este efecto de modelado de ruido da forma al ruido de cuantificación de conversión de 1 bit en frecuencias más altas (Figura 6).
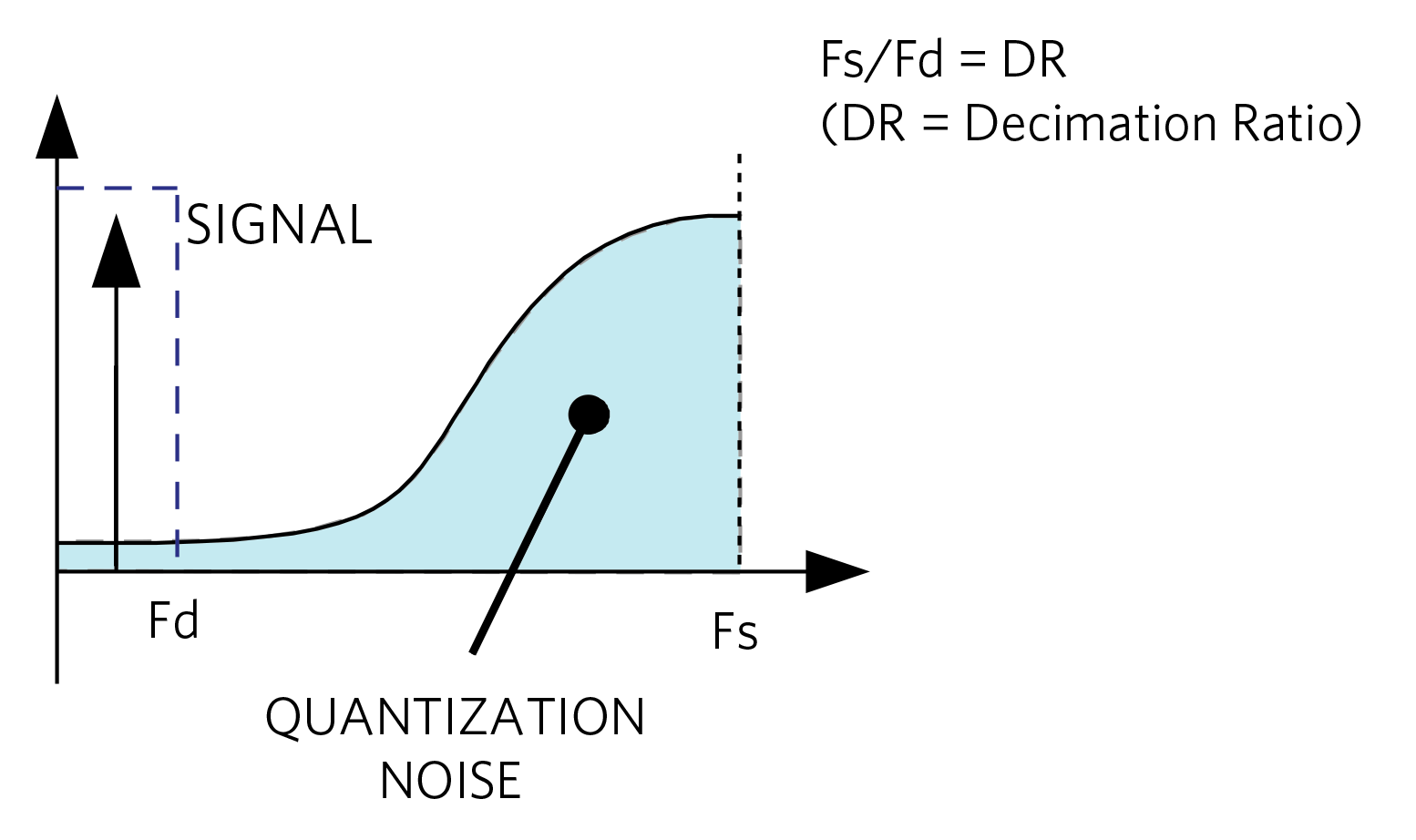 Figura 6:El ruido en la salida del modulador crea una respuesta en forma de ruido. (Fuente:Maxim Integrated)
Figura 6:El ruido en la salida del modulador crea una respuesta en forma de ruido. (Fuente:Maxim Integrated)
En la Figura 6, la frecuencia de Nyquist para el sistema es la frecuencia de muestreo del modulador, F S . El orden del modulador determina el nivel del ruido de cuantificación sobre la frecuencia (Figura 7).
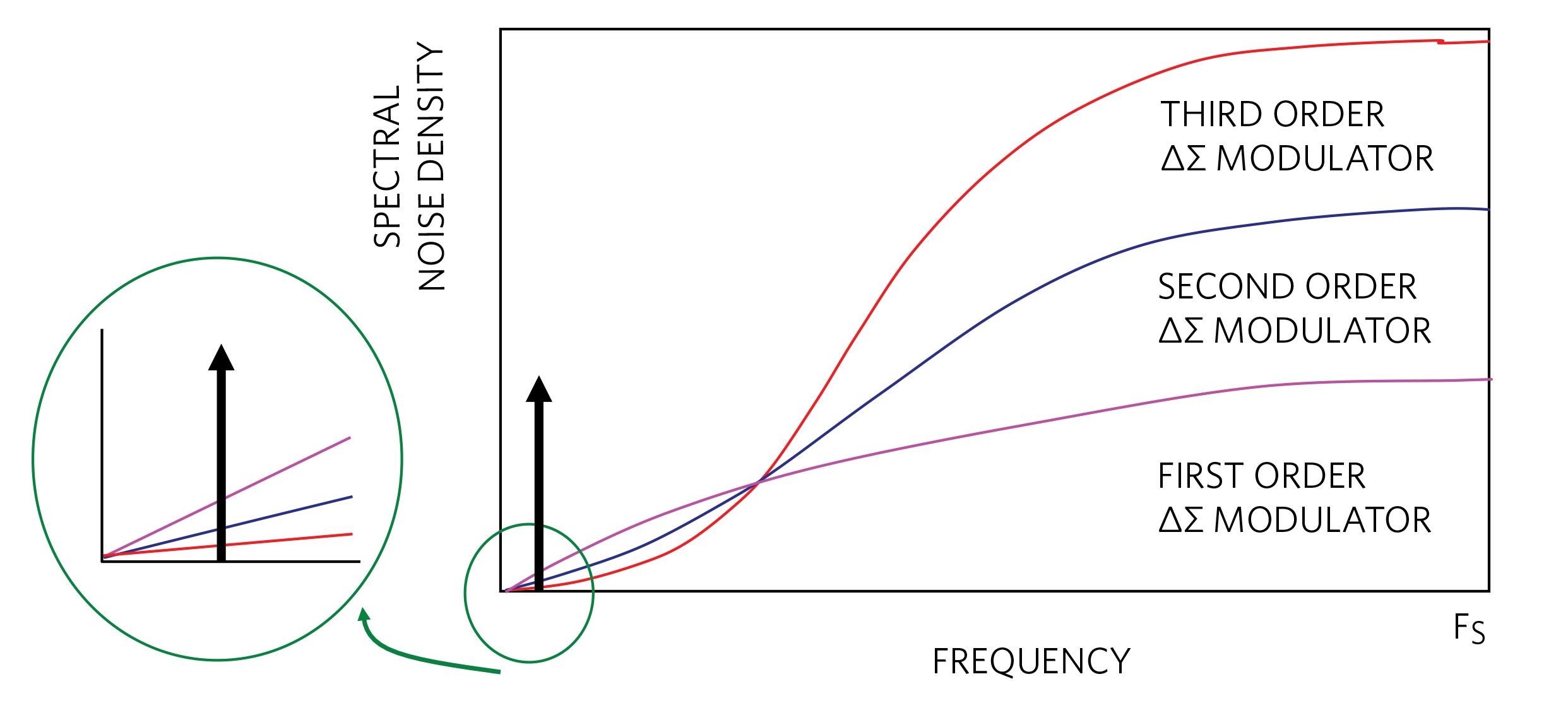
Figura 7:este gráfico muestra la capacidad de modelado de ruido de los moduladores de primer, segundo y tercer orden. (Fuente:Maxim Integrated)
En la Figura 7, el ruido de cuantificación de los moduladores de orden inferior es más alto cerca de DC y más bajo en alta frecuencia. El ΔΣ ADC recopila o sobremuestra el flujo de salida de 1 bit de los moduladores y ejerce el filtrado digital de paso bajo.
Filtro digital / de diezmado
Con el núcleo ΔΣ ADC, hay dos acciones que ocurren para reducir el ruido del sistema. El modulador da forma con éxito su ruido de cuantificación a frecuencias más altas y el filtro digital / de diezmado atenúa el ruido de alta frecuencia.
La velocidad de datos de salida del ADC, según lo dicta la siguiente frecuencia de corte del filtro de paso bajo digital, es F D . La respuesta de frecuencia del filtro digital / diezmador (línea discontinua en la Figura 4) atenúa exitosamente el ruido de frecuencia más alta.
Completo ΔΣ Imagen ADC
Un ΔΣ ADC de trabajo completo en el núcleo requiere un modulador ΔΣ y filtros digitales Sinc y de respuesta de impulso finito (FIR) (Figura 8).
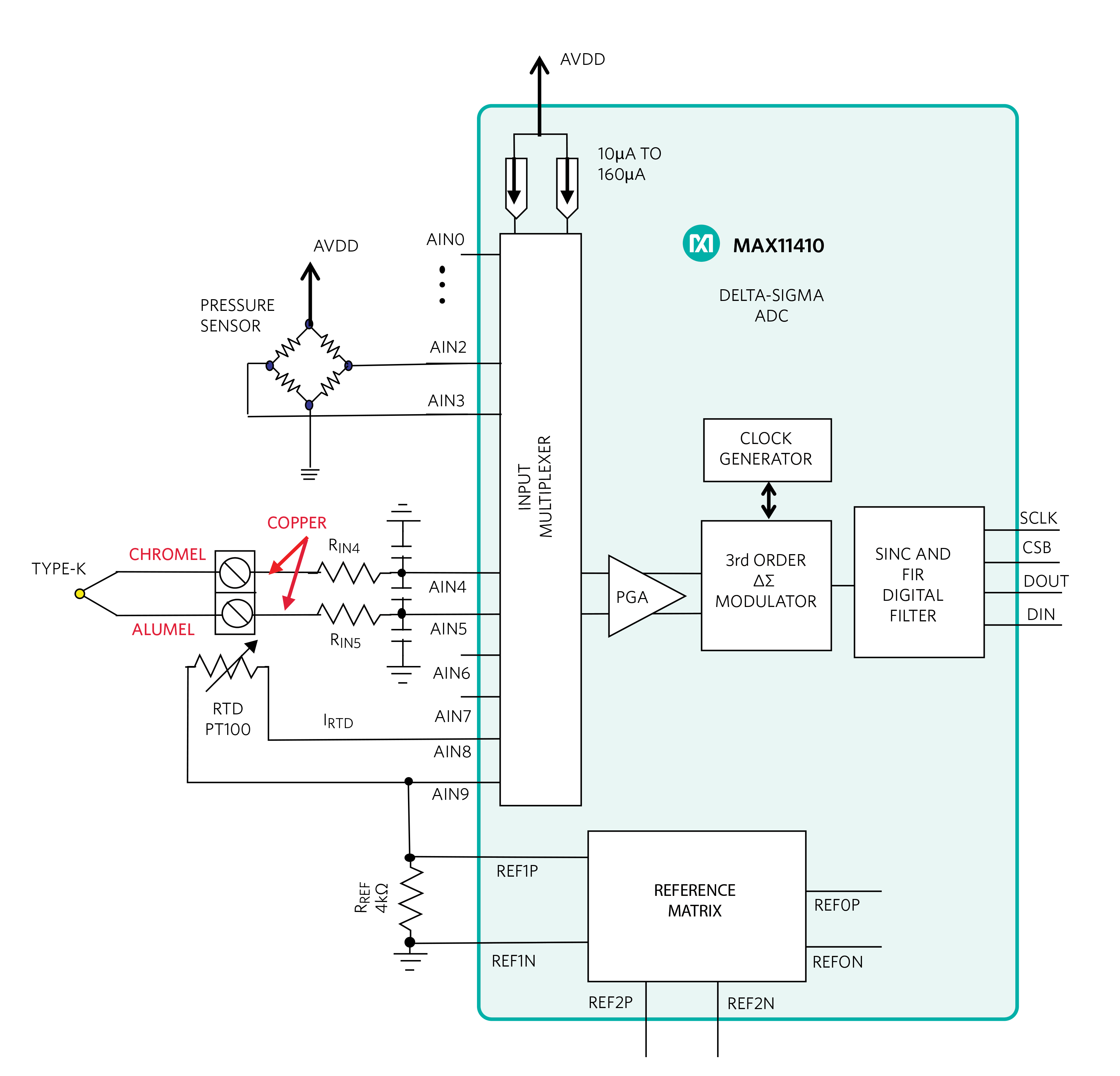
Figura 8:Este diagrama muestra un ADC ΔΣ completo en funcionamiento con entradas de sensor de presión y sensor de temperatura. (Fuente:Maxim Integrated)
En el diagrama de bloques del núcleo ΔΣ ADC (Figura 4), hay un filtro digital / diezmador. El ΔΣ ADC real en la Figura 8 tiene los filtros digitales Sinc y FIR comunes, que completan la imagen de bajo ruido del convertidor.
El filtro digital Sinc realiza una función de filtro de paso bajo. Un diseño de filtro de primer orden se instala en un período de palabra de datos. El filtro Sinc de cuarto orden o Sinc 4 se instala en cuatro períodos de palabras de datos. La forma del filtro de dominio de frecuencia aparece con caídas sobre la frecuencia (Figura 9).

Figura 9:Estos gráficos muestran la respuesta de frecuencia de un filtro Sinc de tercer orden (Sinc
3
). (Fuente:Maxim Integrated)
En la Figura 9, se puede programar la atenuación más baja para que coincida con frecuencias convenientes, como múltiplos de 50 Hz o 60 Hz. El dispositivo de la Figura 8 implementa un Sinc 4 filtro digital.
Las características redondeadas de los filtros digitales Sinc los convierten en uno de los filtros digitales más simples de implementar, por lo que son muy útiles en aplicaciones de señal mixta. Sin embargo, hay aplicaciones en las que se prefieren las esquinas más afiladas. El filtro FIR ofrece esquinas más afiladas con un beneficio adicional de estabilidad. El ΔΣ ADC en la Figura 8 tiene un filtro de 50 Hz / 60 Hz que proporciona un rechazo de más de 90 dB a 50 Hz y 60 Hz a una velocidad de datos de 16 muestras por segundo.
El ADC ΔΣ completo (Figura 8) tiene funciones auxiliares adicionales como un multiplexor de entrada, un amplificador de ganancia programable (PGA), un filtro digital complejo, un generador de reloj y una matriz de referencia. Con un PT100 RDT, una fuente de corriente de 160 μA y una ganancia PGA de 128, el ADC MAX11410 ΔΣ presenta un rango de entrada de 1.234 V a 2.837 V. Con este convertidor de 24 bits en un Sinc 4 configuración, el tamaño del voltaje LSB es 0.039 μV RMS . La precisión de la temperatura se encuentra en el rango de ± 100 ° C y la precisión de RTD es de ~ 4,7 μ ° C / bit.
Este artículo ha presentado problemas asociados con el logro de una interfaz de celda de presión y temperatura precisa con un ADC ΔΣ para productos electrónicos de petróleo, gas y petróleo. El circuito de aplicación utiliza un sensor de presión, termopar y RTC para lograr una conversión de un solo dispositivo, donde las especificaciones clave son ruido, un multiplexor de entrada y el costo de la lista de materiales (BOM).
>> Este artículo se publicó originalmente el nuestro sitio hermano, EDN.
Sensor
- Perfil de temperatura de Raspberry Pi usando LabVIEW
- Biblioteca Python del sensor de temperatura TMP006 con Raspberry pi,
- Sensor de temperatura Python y Raspberry Pi
- Lectura de Raspberry Pi BMP085 Temperatura y presión
- Sistema de control de dispositivo basado en temperatura usando LM35
- Controle la temperatura de su hogar usando su Raspberry Pi
- Sensores analógicos en Raspberry Pi con un MCP3008
- Blog:Beneficios de usar un parche de temperatura de enfriamiento portátil
- Los beneficios de utilizar Robotic Vision para aplicaciones de automatización
- Uso de cerámica en los sistemas de escape para purificar las emisiones
- Sistemas de lubricación por salpicadura y presión en compresores de pistón