


Optimización de la detección de inclinación / ángulo de alta precisión:establecimiento del rendimiento de referencia
En la primera parte de esta serie, revisamos la estructura interna de un acelerómetro MEMS de alta precisión de 3 ejes. En este segundo artículo, revisaremos cómo adquirir un buen conjunto de datos inicial para establecer el rendimiento de referencia y validar qué tipo de niveles de ruido esperar en los análisis de datos posteriores.
Si bien la salida analógica de un acelerómetro podría conectarse a cualquier sistema de adquisición de datos analógicos para el análisis de datos, los fabricantes a menudo proporcionan placas de evaluación optimizadas para colocarse directamente en los sistemas del cliente para facilitar la creación de prototipos con los sistemas integrados existentes. Para fines ilustrativos de este artículo, se utilizó la placa de evaluación de factor de forma pequeño EVAL-ADXL35x. Para el registro y análisis de datos, el EVAL-ADXL35x se conectó a una placa de microcontrolador SDP-K1 y se programó utilizando el entorno Mbed. Mbed es un entorno de desarrollo libre y de código abierto para placas de microcontroladores basadas en ARM. Tiene un compilador en línea y permite a los desarrolladores comenzar rápidamente. La placa SDP-K1, cuando se conecta a la PC, aparece como una unidad externa. Para programar la placa, simplemente arrastre y suelte el archivo binario generado por el compilador en la unidad SDP-K1. 3, 4
Una vez que el sistema Mbed está registrando datos a través del UART, ahora tenemos un entorno de prueba básico para probar experimentos de acelerómetro y transmitir la salida a una terminal simple para el registro de datos y análisis adicionales. Es importante tener en cuenta que, independientemente de la velocidad de datos de salida del acelerómetro, el código Mbed solo registra registros a 2 Hz. Iniciar sesión más rápido que esto es posible en Mbed, pero está fuera del alcance de este artículo.
Un buen conjunto de datos inicial ayuda a establecer el rendimiento de referencia y validar qué tipo de niveles de ruido esperar en la mayoría de nuestros análisis de datos posteriores. Uso de un brazo de tornillo articulado PanaVise 5 que tiene un soporte de ventosa permite una superficie de trabajo razonablemente estable en una configuración de banco, ya que se adhiere a la superficie de trabajo de vidrio. La placa ADXL355 (sostenida desde un lado) es tan estable como la mesa de laboratorio en esta configuración. Los usuarios avanzados más avanzados pueden notar que este soporte de tornillo de banco tendría cierto riesgo de movimiento de vuelco, pero es un método simple y rentable que permite cambiar la orientación con respecto a la gravedad. Con la placa ADXL355 colocada en el soporte como se muestra en la Figura 1, se captura un conjunto de datos durante 60 segundos para un primer análisis.
haz clic para ver la imagen a tamaño completo
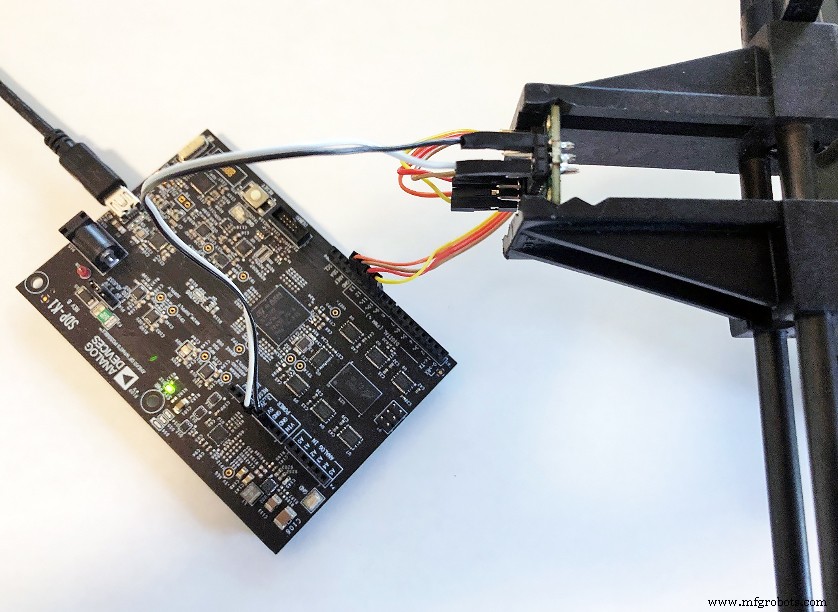
Figura 2. Configuración de prueba con un soporte EVAL-ADXL35x, SDP-K1 y PanaVise. (Fuente:Analog Devices)
haga clic para ver la imagen en tamaño completo
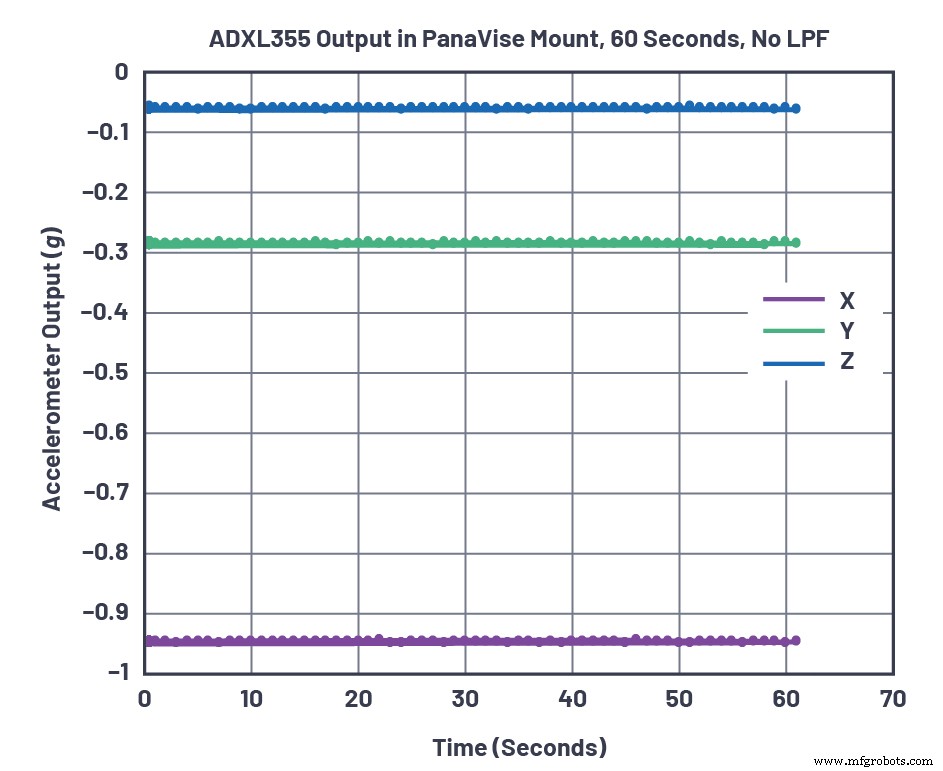
Figura 2. Datos ADXL355 sin filtro de paso bajo (registro 0x28 =0x00), tomados durante 1 minuto. (Fuente:Analog Devices)
Si se toman los 120 puntos de datos y se mide una desviación estándar, se muestra un ruido en el rango de 800 μ g a 1,1 m g . A partir de las especificaciones de rendimiento típicas de ADXL355 en la hoja de datos, vemos que la densidad de ruido aparece como 25 µ g / √Hz. Con la configuración predeterminada del filtro de paso bajo (LPF), el acelerómetro tiene un ancho de banda de aproximadamente 1000 Hz. Entonces se esperaría que el ruido fuera de 25 µ g / √Hz × √1000 Hz =791 µ g rms, asumiendo un filtro de pared de ladrillos. Este primer conjunto de datos pasa la primera prueba de rastreo. Para ser precisos, la conversión de densidad espectral de ruido a ruido rms debe tener un factor que represente el hecho de que el LPF digital no tiene una caída infinita (es decir, un filtro de pared de ladrillos). Algunos utilizan un coeficiente de 1,6 × para una caída de 20 dB / década de un solo polo de RC, pero el filtro de paso bajo digital ADXL355 no es un filtro de RC de un solo polo. En cualquier caso, asumir un coeficiente entre 1 y 1,6 al menos nos lleva a la aproximación correcta para las expectativas de ruido.
Para muchas aplicaciones de detección de precisión, 1000 Hz es un ancho de banda demasiado amplio para las señales que se miden. Para ayudar a optimizar el espacio de intercambio entre el ancho de banda y el ruido, el ADXL355 tiene un filtro de paso bajo digital integrado. Para la siguiente prueba, establecemos el LPF en 4 Hz, que debería tener una reducción neta de ruido por un factor de √1000 / √4 ≈ 16. Esto se hace simplemente en el entorno Mbed usando la estructura simple que se muestra en la Figura 3 , mientras que los datos se muestran en la Figura 4. 6 Después de filtrar, el ruido se redujo de forma demostrable como se esperaba. Esto se muestra en la Tabla 1 a continuación.
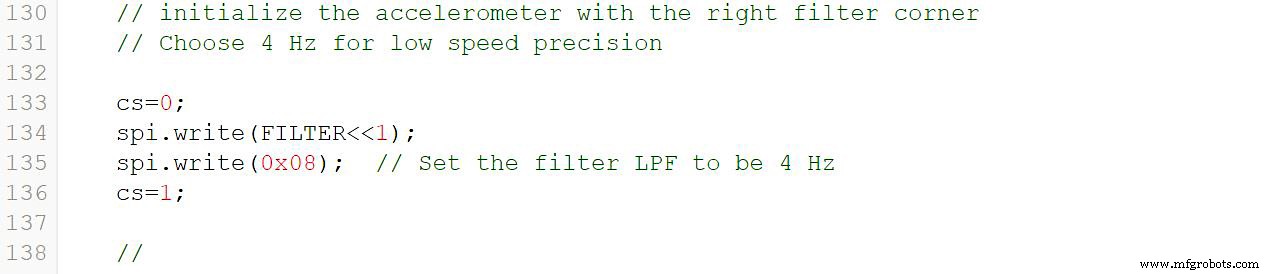
Figura 3. Código Mbed para configurar un registro. (Fuente:Analog Devices)
haga clic para ver la imagen a tamaño completo
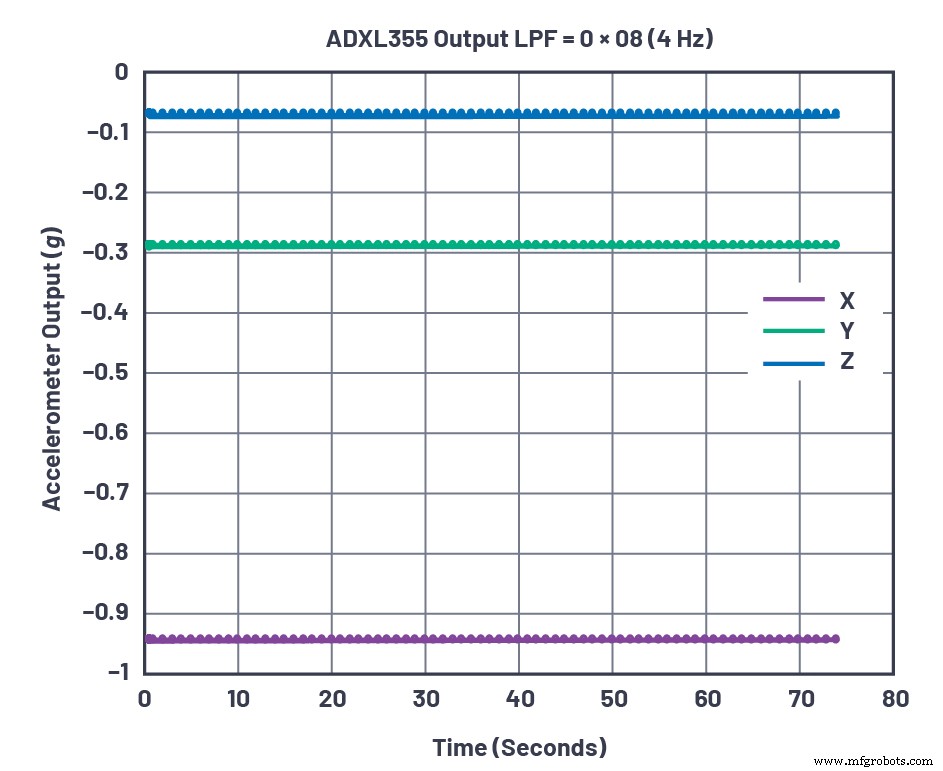
Figura 4. Datos ADXL355 con el LPF configurado en 4 Hz (registro 0x28 =0x08), tomado durante 1 minuto. (Fuente:Analog Devices)
Tabla 1. Ruido esperado y medido del ADXL355 (fuente:dispositivos analógicos)
RuidoXYZ Teórico(μg) Medido
(μg) Teórico
(μg) Medido
(μg) Teórico
(μg) Medido
(μg) Sin filtro 79192379111397918054 Filtro Hz 5058501855063
La Tabla 1 muestra que el ruido en el eje y con la configuración actual es más alto de lo esperado por la teoría. Después de investigar las causas probables, notamos que la vibración adicional del ventilador de la computadora portátil y otros equipos de laboratorio probablemente se manifiesta en el eje y como ruido. Para probar esto, se giró el tornillo de banco para colocar el eje x en la posición donde estaba el eje y para esta prueba y el eje de mayor ruido se movió hacia el eje x. La diferencia de ruido entre los ejes parece ser ruido de instrumentación y no una diferencia intrínseca en los niveles de ruido a través de los ejes del acelerómetro. Este tipo de prueba es efectivamente la prueba "Hola mundo" para un acelerómetro de bajo ruido, por lo que brinda confianza para realizar más pruebas.
Para tener una idea del efecto que tendría un choque térmico en el ADXL355, tomamos una pistola de aire caliente 7 y ponerlo en modo de aire más frío (prácticamente unos pocos grados por encima de la temperatura ambiente) para aplicar tensiones térmicas al acelerómetro. La temperatura también se registra mediante el sensor de temperatura integrado del ADXL355. El experimento utilizó el tornillo de banco para colocar el ADXL355 verticalmente de modo que una pistola de aire pudiera soplar aire en la parte superior del paquete. El resultado esperado de este experimento es que el coeficiente de temperatura de la compensación se mostraría a medida que la matriz se calienta, pero cualquier tensión térmica diferencial aparecería casi instantáneamente. En otras palabras, si el eje individual de detección es sensible al estrés térmico diferencial, se espera ver un aumento en la salida del acelerómetro. Eliminar el valor promedio de los datos cuando estaba en silencio permite una comparación fácil de los tres ejes al mismo tiempo. Los resultados se muestran en la Figura 5.
haga clic para ver la imagen en tamaño completo
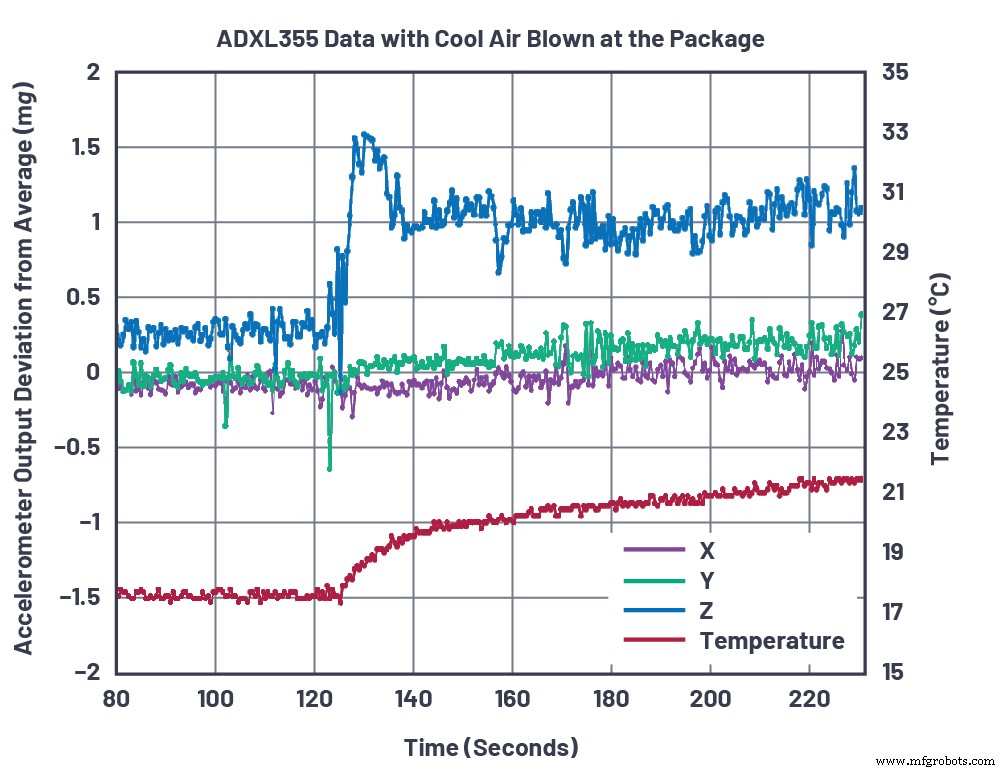
Figura 5. Datos de choque térmico del ADXL355 usando una pistola de aire caliente en una configuración fría. (Fuente:Analog Devices)
Como se puede ver en la Figura 5, la pistola de aire estaba soplando aire ligeramente más caliente sobre el paquete de cerámica, que está sellado herméticamente al ambiente. Esto da como resultado ~ 1500 μ g desplazamiento en el eje z, una cantidad mucho menor de desplazamiento en el eje y (tal vez ~ 100 µ g ) y prácticamente ningún cambio en el eje x. Si bien muchos productos de clientes finales tienen algún gabinete en la parte superior de la PCB que distribuye las tensiones térmicas diferenciales, es importante considerar estos tipos de tensiones transitorias rápidas, que pueden manifestarse en un error de compensación como se ve en esta sencilla prueba.
La Figura 6 muestra el efecto de polaridad opuesta cuando se apaga la pistola de aire caliente.
haga clic para ver la imagen en tamaño completo
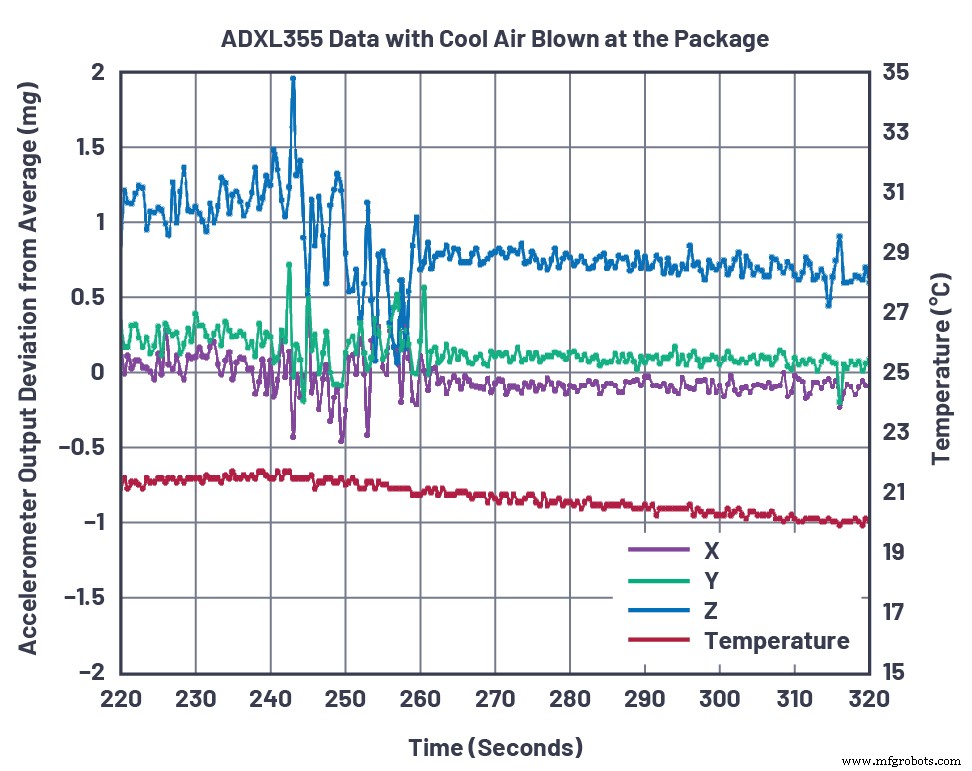
Figura 6. Choque térmico del ADXL355 con una pistola de aire que se apaga en t =240 segundos. (Fuente:Analog Devices)
Este efecto es aún más pronunciado cuando la pistola de aire se usa en el ajuste calentado; es decir, cuando el choque térmico es de mayor magnitud. La salida de la pistola de aire Weller es del orden de ~ 400 ° C, por lo que es importante aplicarla a una distancia para evitar daños por sobrecalentamiento o choque térmico. En esta prueba, se sopló aire caliente a aproximadamente 15 cm del ADXL355, lo que resultó en un choque de temperatura casi instantáneo de ~ 40 ° C, como se muestra en la Figura 7.
haz clic para ver la imagen en tamaño completo
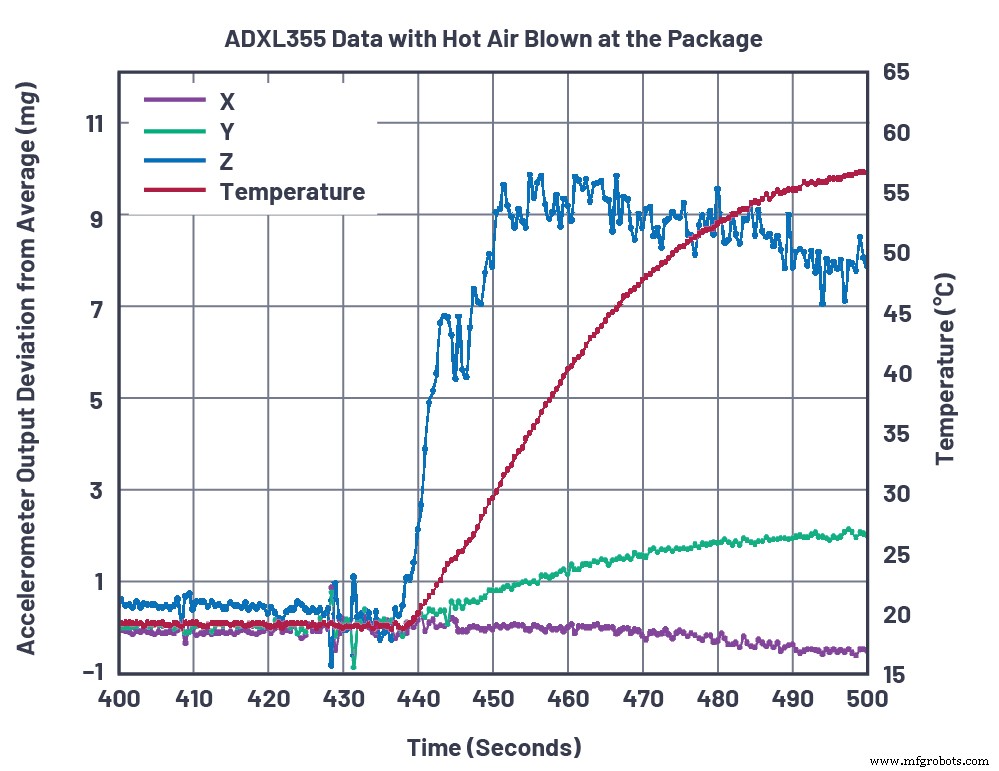
Figura 7. Choque térmico ADXL355 con pistola de aire caliente. (Fuente:Analog Devices)
Aunque la cantidad de choque térmico es bastante fuerte, todavía es sorprendente ver cuánto más rápido responde el eje z en este experimento que los ejes xey. Usando el coeficiente de temperatura de compensación de la hoja de datos, y con un cambio de temperatura de 40 ° C, se esperaría observar alrededor de 100 µ g / ° C × 40 ° C =4 m g shift, que los ejes xey eventualmente comienzan a mostrar. Sin embargo, notando que casi instantáneamente 10 m g El cambio en el eje z muestra que se trata de un efecto diferente que se está tratando en lugar del cambio de compensación debido a la temperatura. Esto es el resultado de la tensión / deformación térmica diferencial en el sensor y se ve más obviamente en el eje z debido a que este sensor es más sensible a las tensiones diferenciales que xey, como se describió anteriormente en este artículo.
El coeficiente de temperatura típico del offset del ADXL355 (offset tempco) se especifica en ± 100 µ g / ° C en la hoja de datos. Es importante comprender la metodología de prueba utilizada aquí, ya que el tempco de compensación se mide con los acelerómetros en un horno. El horno se eleva lentamente a través del rango de temperatura del sensor y se miden las pendientes de las compensaciones. En la Figura 8 se muestra un ejemplo típico.
haz clic para ver la imagen en tamaño completo
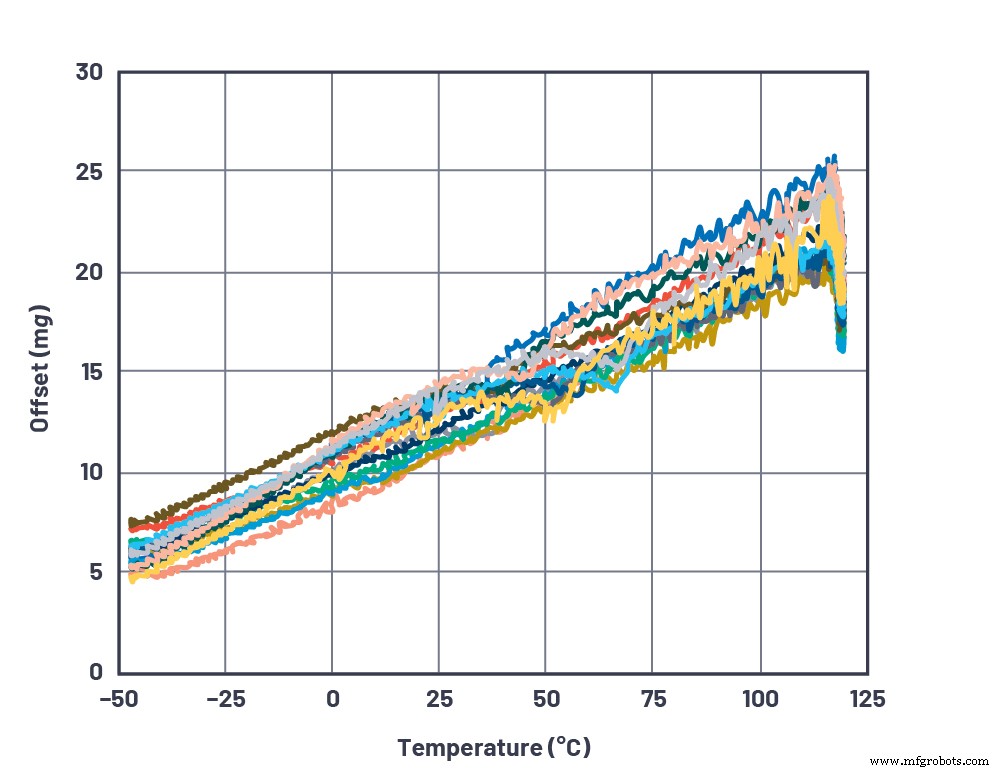
Figura 8. Caracterización de temperatura en horno del ADXL355. (Fuente:Analog Devices)
Hay dos efectos en juego en esta trama. Uno es el tempco offset como se caracteriza y documenta en la hoja de datos. Esto se puede interpretar como el valor medio de muchas partes de –45 ° C a + 120 ° C a medida que el horno aumenta la temperatura a 5 ° C / min pero sin tiempo de remojo. Esto se derivaría de gráficos similares a la Figura 9 y llamaría alrededor de 18 m g más de 165 ° C, o aproximadamente 109 µ g / ° C, que se encuentra ligeramente fuera del valor típico de 100 µ g / ° C, pero dentro del rango mínimo y máximo especificado en la hoja de datos. Sin embargo, considere el lado derecho de la Figura 9, ya que los dispositivos continúan en remojo a 120 ° C durante aproximadamente 15 minutos. A medida que los dispositivos se sientan a una temperatura alta, la cantidad real de desplazamiento de compensación disminuye y mejora. En este caso, el valor medio es cercano a 10 m g más de 165 ° C o aproximadamente 60 µ g / ° C offset tempco. El segundo efecto en juego es la tensión térmica diferencial a medida que la masa de prueba del sensor se estabiliza en temperatura en todo el dispositivo de silicio y luego se reduce la tensión. Este es el efecto que se ve en la prueba de pistola de aire que se muestra en la Figura 6 a la Figura 8 y es importante comprender que este efecto opera en una escala de tiempo más rápida que los tempcos de compensación a más largo plazo que se enumeran en la hoja de datos. Esto podría ser valioso para muchos sistemas que, debido a su dinámica térmica general, probablemente tendrán una rampa mucho más lenta que 5 ° C / min.
En la tercera parte de esta serie, exploraremos otros hechos que afectan la estabilidad y luego ofreceremos recomendaciones de diseño de sistemas mecánicos para mejorar el rendimiento general de un acelerómetro MEMS de alta precisión de 3 ejes.
Referencias
1 Chris Murphy. “Elección del acelerómetro MEMs más adecuado para su aplicación — Parte 1” Diálogo analógico, vol. 51, No. 4, octubre de 2017.
2 Chris Murphy. "Medición de inclinación del acelerómetro sobre temperatura y en presencia de vibraciones". Diálogo analógico, agosto de 2017.
3 Sistema de evaluación SDP-K1. Analog Devices, Inc.
4 Mbed:Guía del usuario para SDP-K1. Analog Devices, Inc.
5 Soporte de brazo articulado PanaVise. PanaVise.
6 Código Mbed. Analog Devices, Inc.
7 Pistola de aire de calefacción / refrigeración Weller 6966C. Weller.
8 Parileno. Wikipedia.
Incrustado
- Construya su infraestructura de nube para el rendimiento y la eficiencia
- VersaLogic lanza una computadora integrada de alto rendimiento basada en Xeon
- La recopilación de datos de IoT alimenta la agricultura de precisión
- DATA MODUL:monitores de marco abierto de gran tamaño con alto brillo y función easyTouch
- Seis innovaciones que impulsan mejoras en el rendimiento del hardware criptográfico
- TECHWAY:plataforma Kintex-7 FPGA PCIe para aumentar el rendimiento de la velocidad de datos con 12 enlaces HSS
- Abaco:XMC resistente ofrece 2,3 TeraFLOPS de máximo rendimiento y compatibilidad con CUDA y OpenCL
- La unidad de negocios de materiales de alto rendimiento de Lanxess será legalmente independiente
- Monitoreo del desempeño:desafíos, soluciones y beneficios
- Centros CNC de alta precisión y servicio pesado
- Torneado de alto rendimiento