


Haga una máquina de escribir para hacer tareas caseras en casa
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
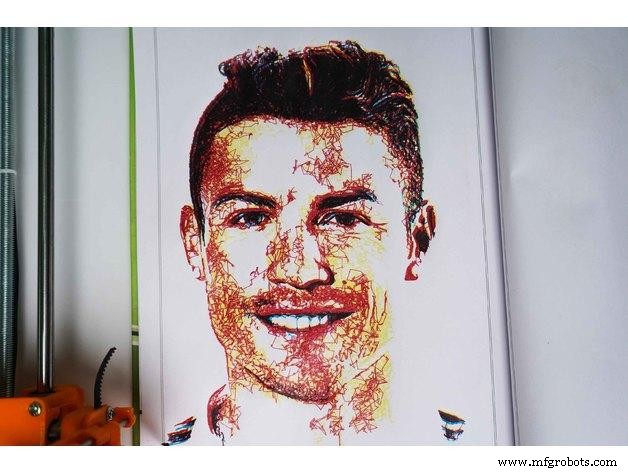
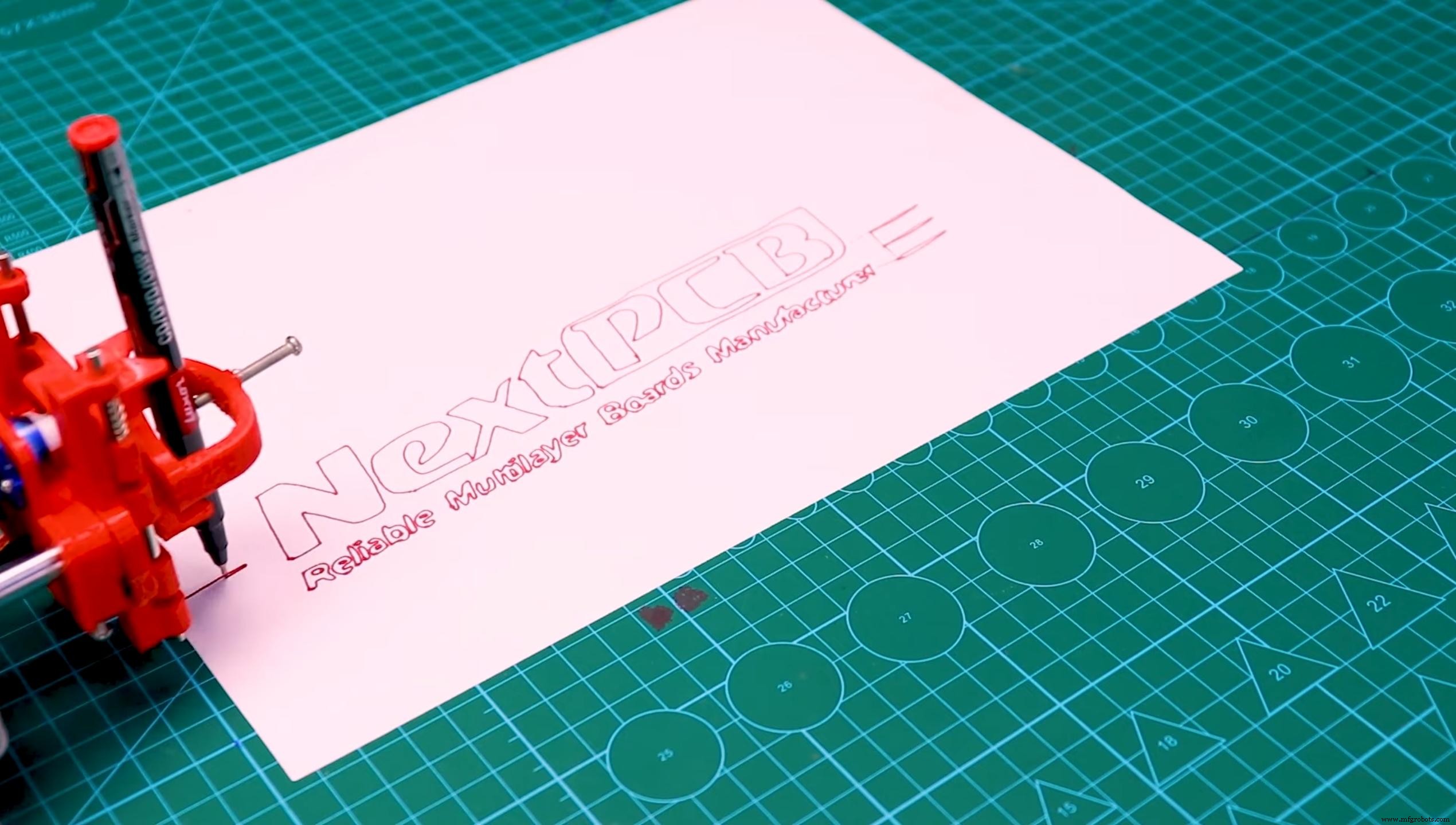
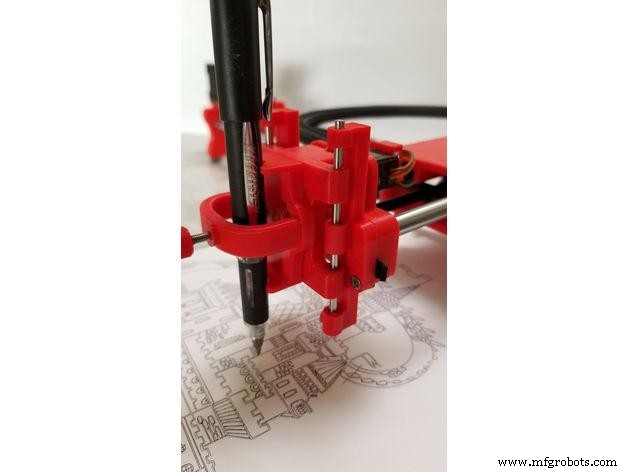
Drawing Robot / Pen Plotter / Drawing Machine es una versión de hardware abierto de la famosa máquina AxiDraw, que es un trazador de lápiz, capaz de escribir o dibujar en casi cualquier superficie plana. Puede escribir con bolígrafos, rotuladores permanentes, lápices y otros implementos de escritura para manejar una variedad infinita de aplicaciones.
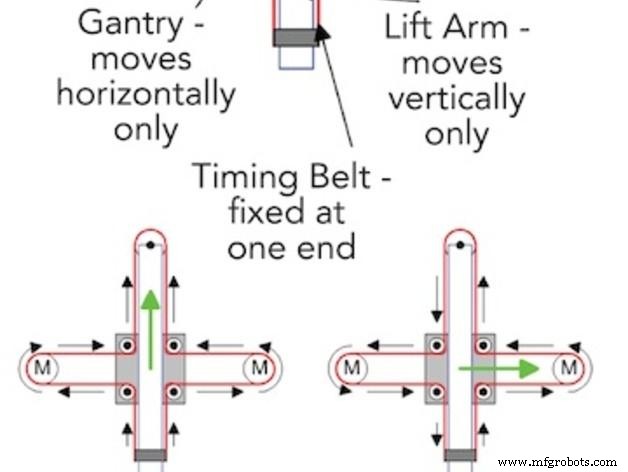
Su diseño único incluye un cabezal de escritura que se extiende más allá de la máquina, lo que permite dibujar en objetos más grandes que la propia máquina. La mayor ventaja de la máquina es que se puede colocar sobre el libro debido al diseño de extensión XY del núcleo de la máquina.
Este robot de dibujo / trazador de lápiz / máquina de dibujo es similar al AxiDraw disponible comercialmente. Está alimentado por un controlador Arduino Uno, usa un escudo CNC y firmware GRBL
El costo para construir el robot de dibujo es de entre $ 75, dependiendo de dónde compre sus piezas y si ya posee algunas de las piezas, como el Arduino.
Puedes encontrar todos mis proyectos en https://www.diyprojectslab.com/
Área máxima de dibujo 24 * 30 CM.
Gracias NextPCB
Este proyecto se completó con éxito gracias a la ayuda y el soporte de NextPCB. Chicos, si tienen un proyecto de PCB, visiten su sitio web y obtengan interesantes descuentos y cupones.
Envío gratis 0 $ Prototipo de PCB:https://www.nextpcb.com/pcb-quote? Act =2 &code =Romeo ...
Sorteo de Navidad de Acción de Gracias 100% ganado:https://www.nextpcb.com/christmas-lucky-draw? Code ...
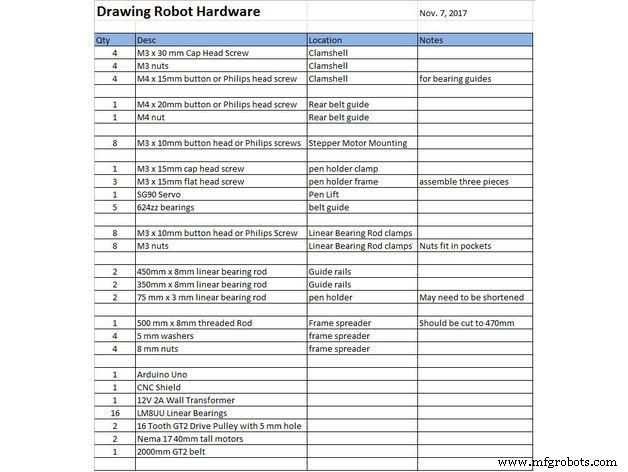
Paso 1:Piezas y materiales necesarios

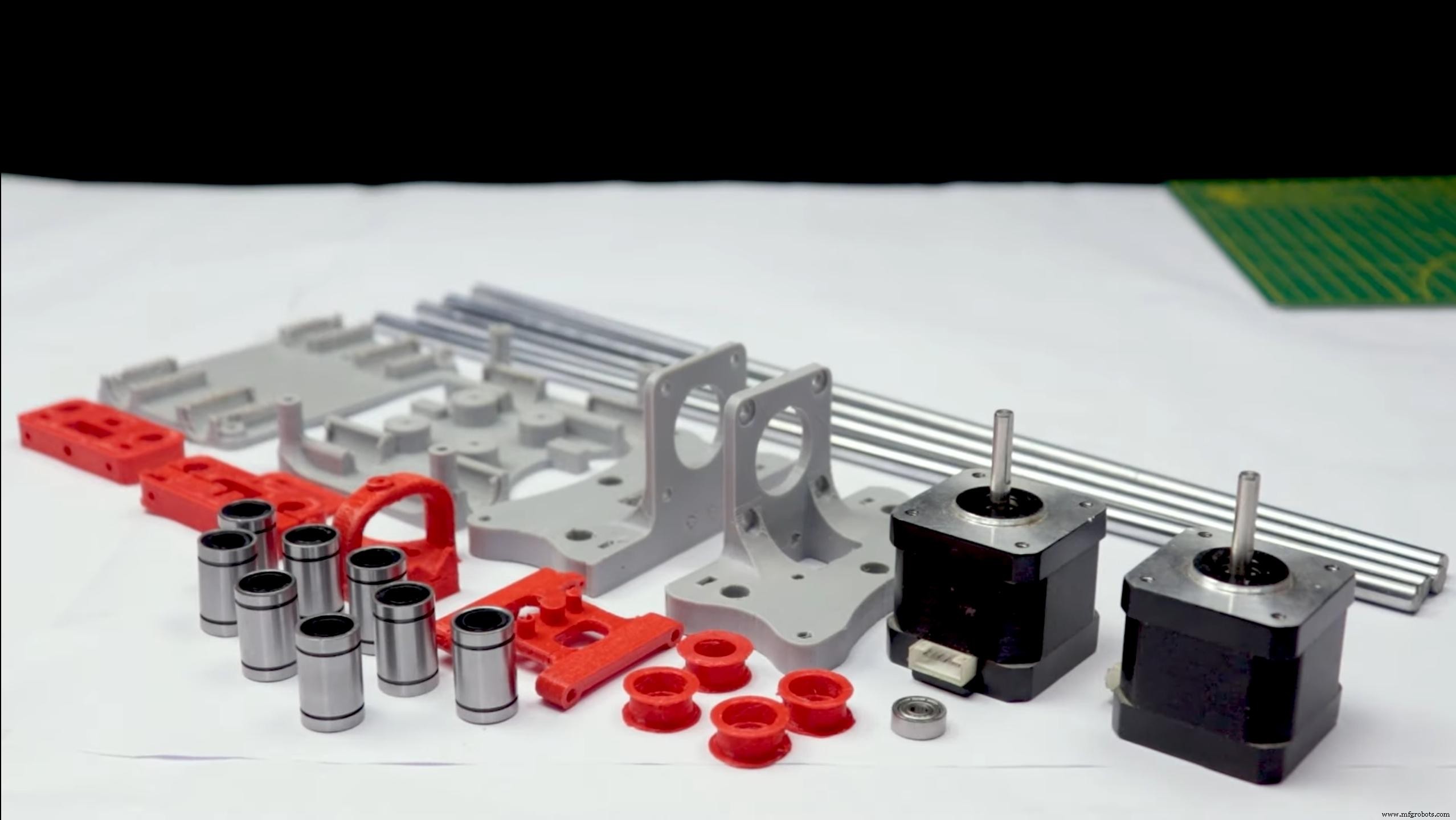
2 x motores paso a paso Nema 17 Amazon.com
2 x Varilla lineal M8 x 450 mm para X Axis Amazon.com
2 x varilla lineal M8 x 350 mm para eje Y Amazon.com
2 x Varilla lineal de 3 mm para eje Z (puede obtenerla del CDROM antiguo)
Amazon.com:1 x varilla roscada M8 x 480 mm 8 x LM8UU rodamientos Amazon.com
1 x Servo Sg901 x Spring 5m (de bolígrafo) Amazon.com
2 x GT2 Polea, 16 dientes Amazon.com
5 x Rodamiento 624zz Amazon.com
1 cinturón GT2 de 2000 mm Amazon.com
1 x Arduino Uno Amazon.com
1 x Escudo CNC Amazon.com
2 x A4988 Controlador paso a paso con disipador de calor Amazon.com
6 x Jerséis Amazon.com
1 x fuente de alimentación 12V 2A Amazon.com
Nueces
- 7 x M3-0.5
- 5 x M4-0.7
- 4 x 5 / 16in-18
Amazonas
Tornillos
- 13 x Phillips M3-0,5 x 16 mm
- 4 x Phillips M3-0,5 x 6 mm
- 5 x Phillips M4-0.7x 35 mm
- 1 x Hex M3-0.5 x 20 mm
Lavadoras
- Lavadora de 4 x 5/16 pulgadas
- 4 x arandelas M3
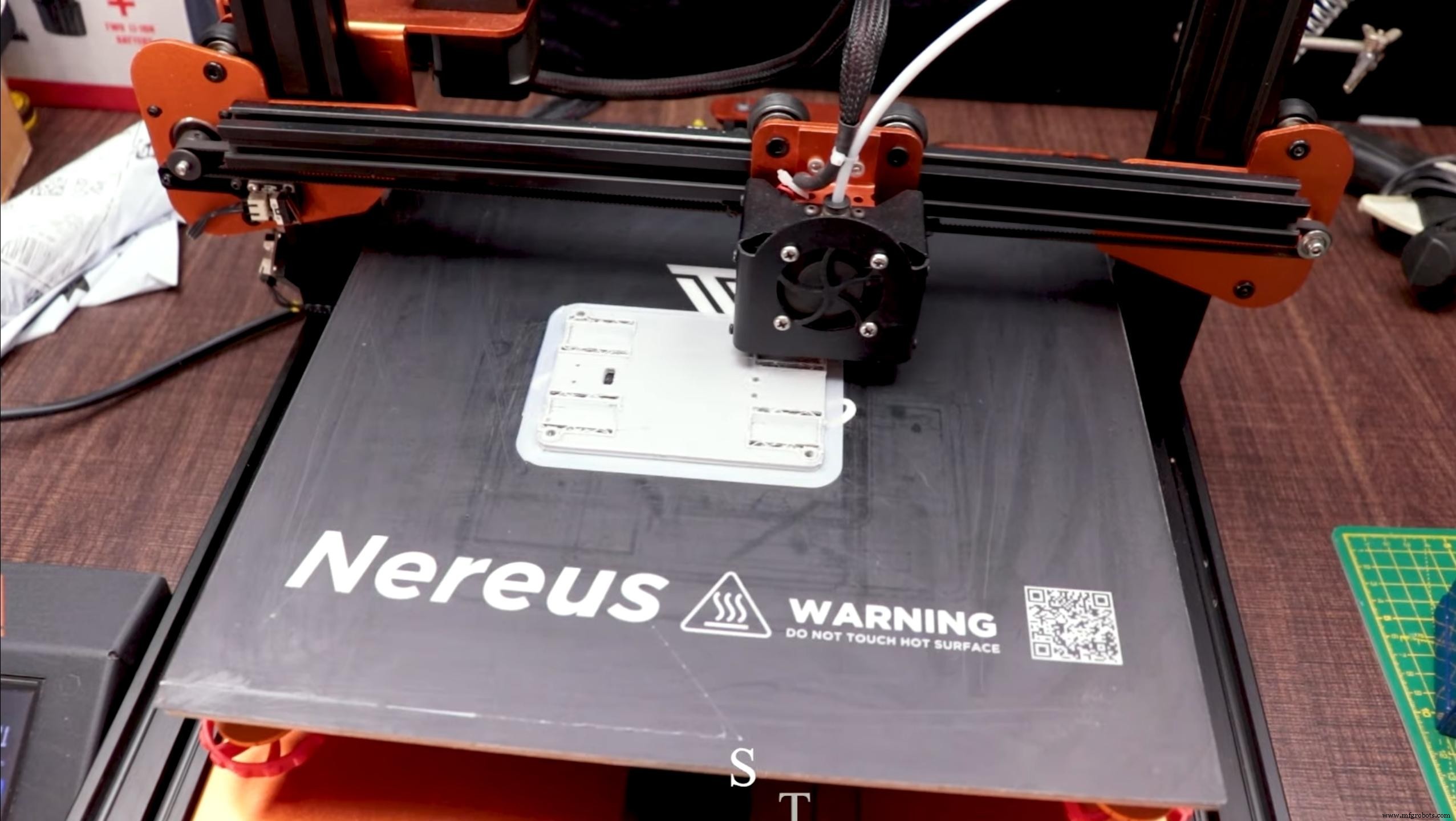
Paso 2:Impresión 3D

Descarga los archivos de Thingiverse
Abra los modelos 3D en Cura o cualquier otra cortadora.
Utilice un 75% de relleno en todas las piezas (un relleno del 70% al 100% también funcionará)
Impreso todas las piezas con una altura de capa de 0,10 - 0,20 mm
Impreso con PLA
Utilice soportes en el portalápices, el control deslizante, X_Support_L y X_Support_R
Nota:La parte más larga tomó alrededor de 10 horas y la más corta tardó 30 minutos en imprimirse
PLA está bien para este diseño. Imprimo a 200C en BuildTak. Ninguna de las partes requiere balsas o ala. Sugiero soportes solo para el portalápices y la placa del extremo del eje Z que está de pie.
Paso 3:ensamble el eje X
Recuerde que necesita (2) barras lineales de 350 mm y (2) 450 mm de largo
Tome el (2) 450 mm varillas lineales e insértelas en cualquier parte de soporte en x
- Es posible que deba usar una lima redonda para suavizar los orificios en los que los inserta
- Además, puede usar un mazo de goma para ayudar a insertar las varillas
Ahora tome la varilla roscada e insértela en el orificio de abajo. Introduzca una arandela de 5/16 pulg. Y una tuerca de 5/16 pulg. A ambos lados de la pieza de soporte en X
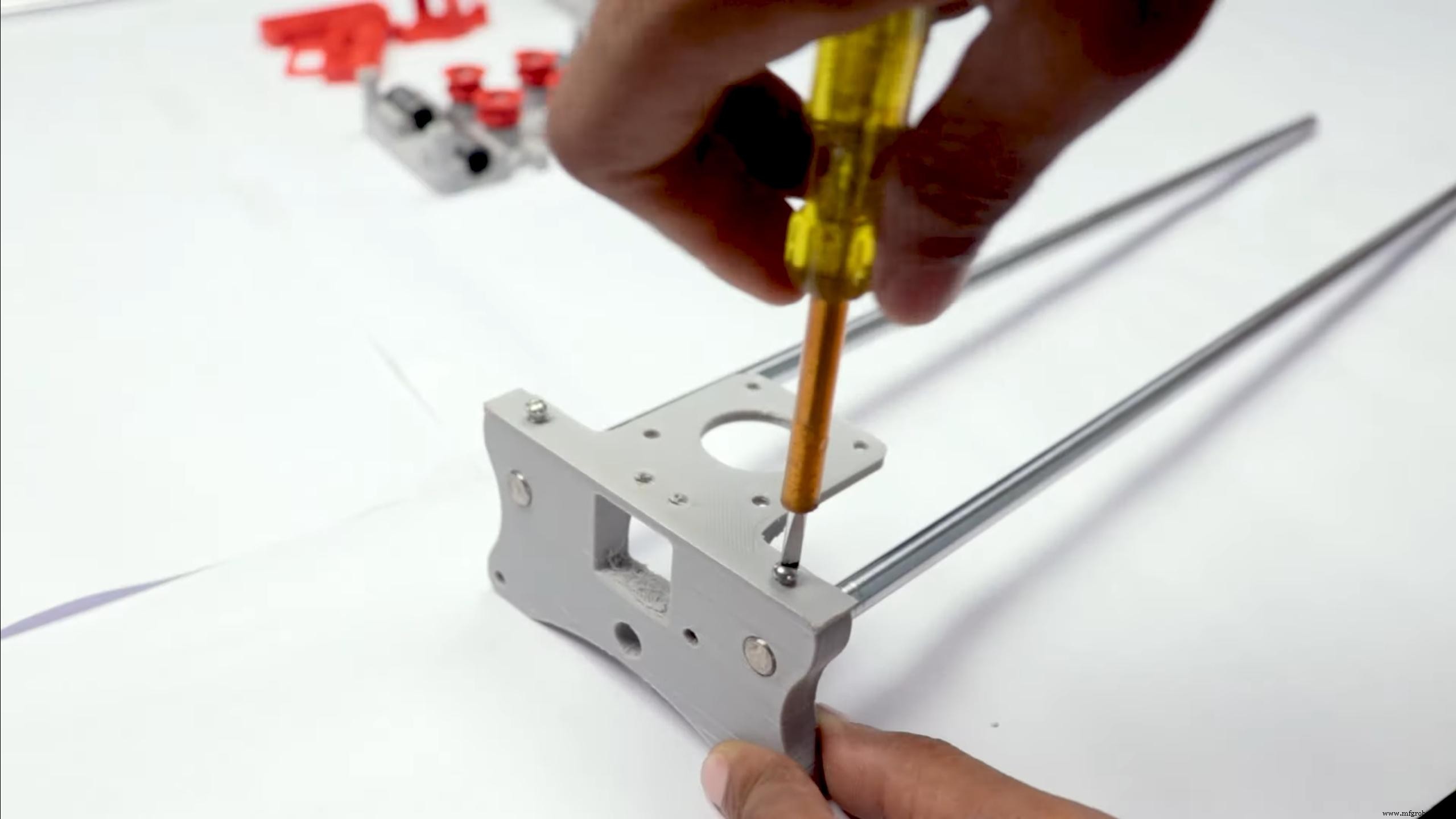
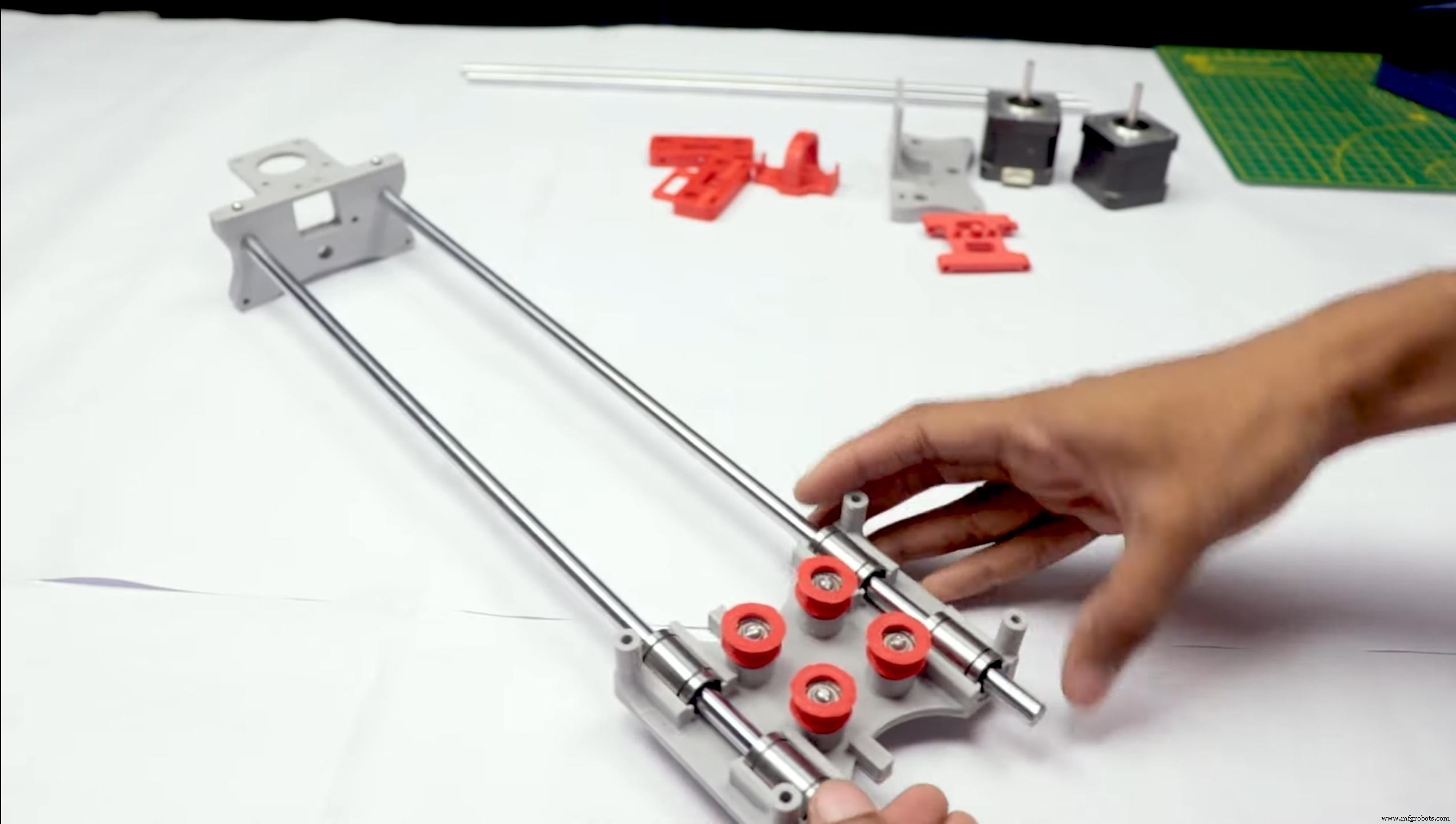
Paso 4:Ensamble el cojinete del eje X


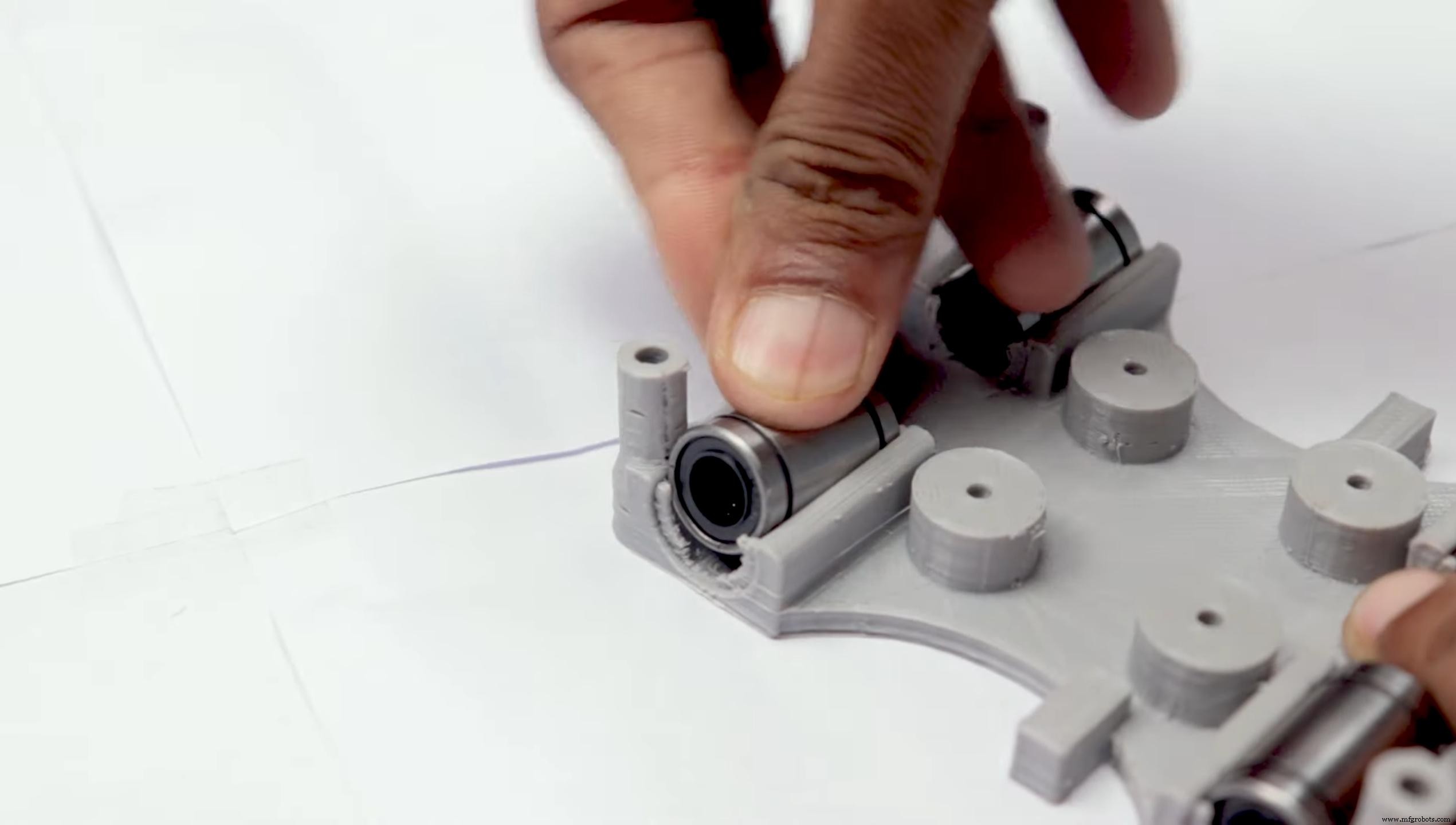


Ahora desea empujar los cojinetes LM8UU en su lugar en la cubierta superior e inferior (la cubierta superior e inferior toman (4) cojinetes cada uno)
Tome (4) cojinetes 624zz y empújelos a través de las poleas locas impresas en 3D. Deje el quinto cojinete para más tarde cuando monte el eje Y
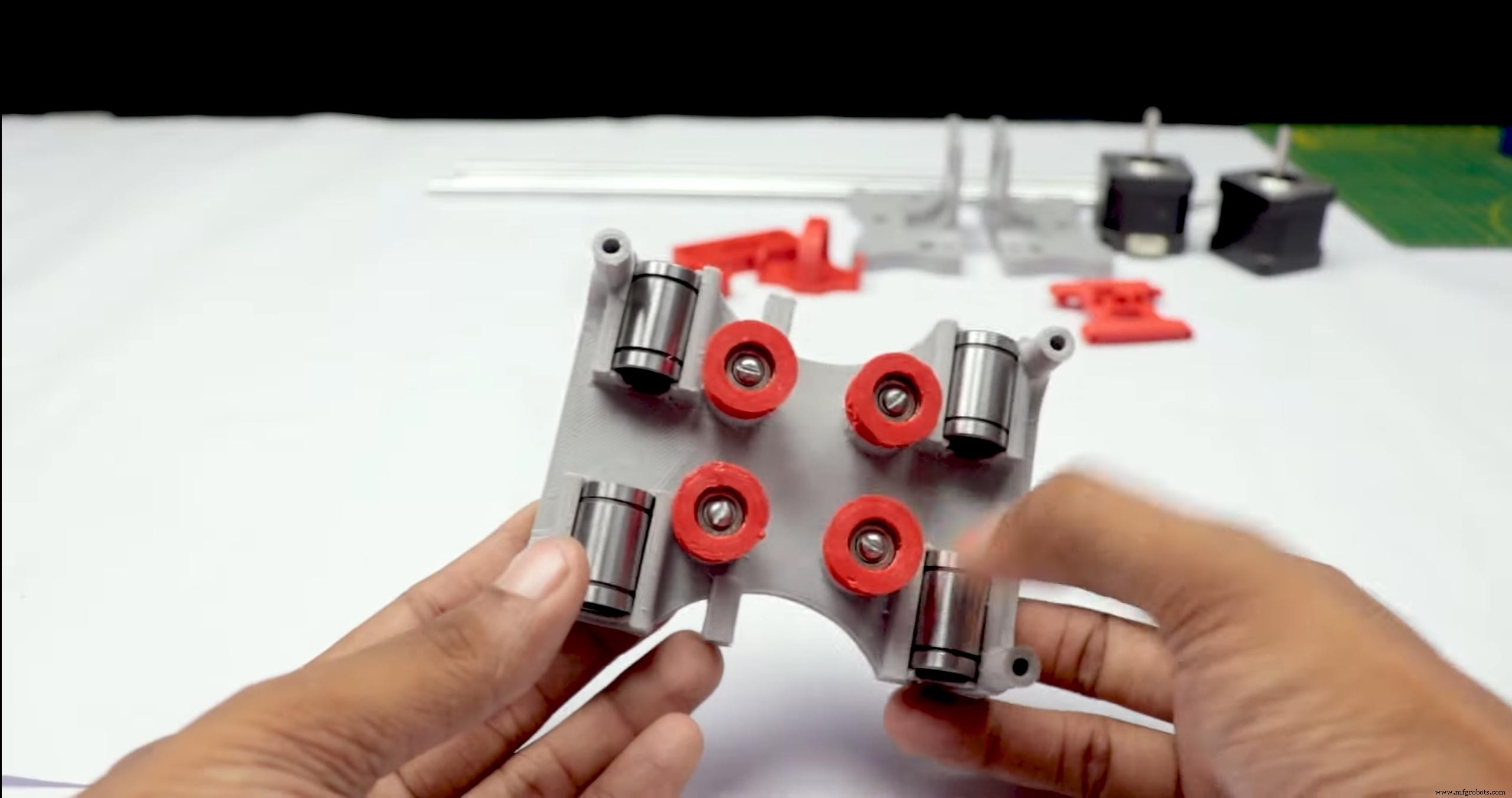
Montaje del eje X (carro)
- Obtenga (4) tornillos M3-0.5 x 20 mm, (4) tuercas M3, (4) arandelas M3 y (4) rodamientos 624zz con las poleas locas instaladas
- Tome un tornillo y pase una arandela a través de él, la arandela descansará sobre el cojinete. La tuerca estará en la parte inferior del carro, lo que asegurará el rodamiento en su lugar
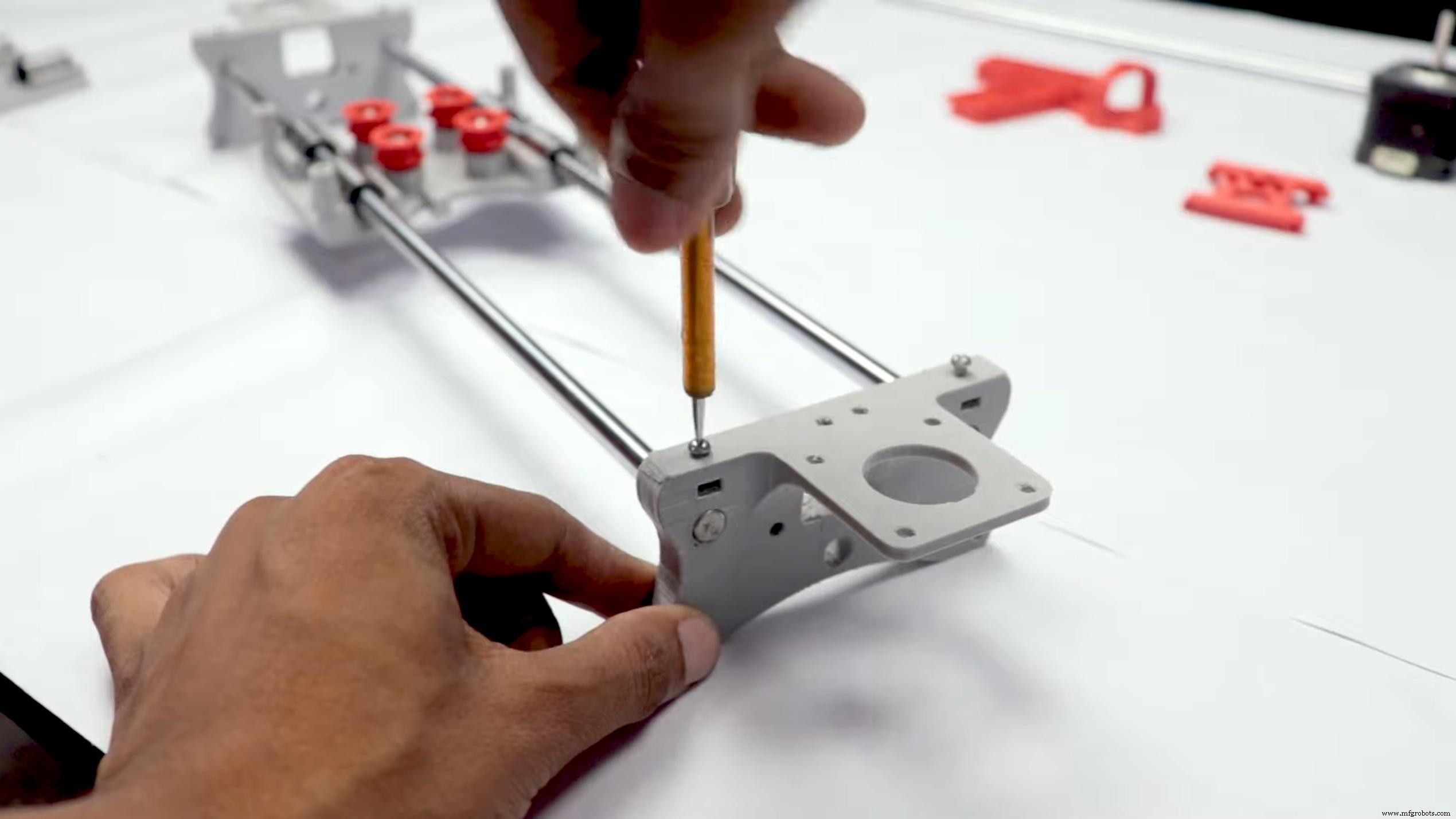
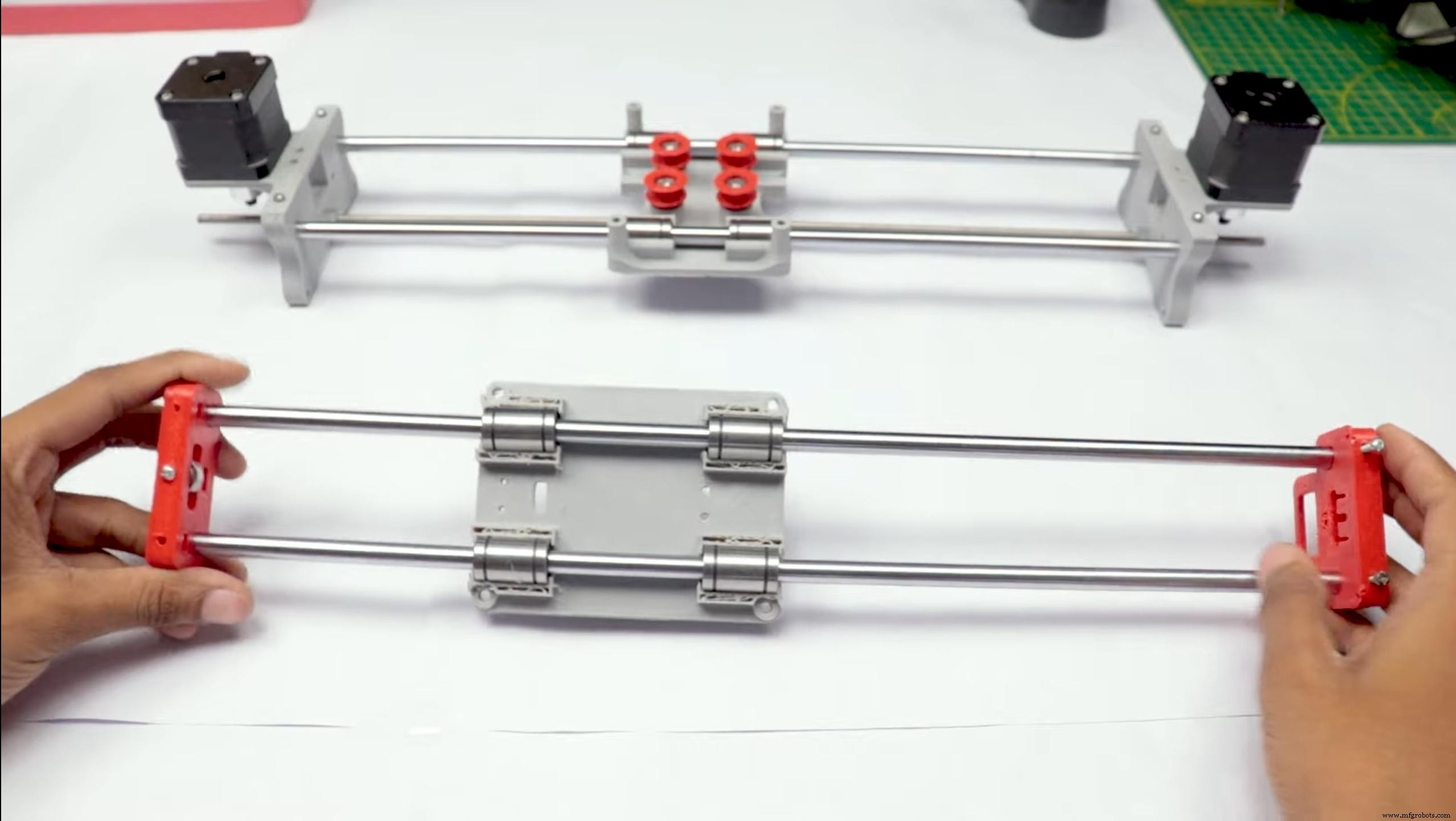
Montaje del eje X (soporte X)
- Deslice la cubierta a través de las varillas lineales de 450 mm (eje X)
- Use un mazo de goma nuevamente para sujetar el último soporte en X en las varillas lineales
- Asegúrese de que las varillas sobresalgan por igual en ambos lados
- Deslice el otro extremo de la varilla roscada a través del orificio del soporte en X
- Coloque el último juego de tuercas y arandelas para mantener el soporte en X en su lugar
- Ahora que el eje X está completo, puede usar (2) tornillos Phillips M3-0.5 x 16 mm por soporte X para ayudar a evitar que las barras lineales se deslicen
Paso 5:Ensamble el eje Y
Y-Back
- Tome las (2) varillas lineales de 350 mm e insértelas en la pieza de respaldo en Y con un mazo de goma
- Obtenga (1) tornillo M4-0.5 x 35, (1) tuerca M4 y el quinto cojinete 624zz
- Obtenga (2) tornillos M3-0.5 x 16 para asegurar las varillas lineales
- Deslice el cojinete al insertar el tornillo a través de la pieza trasera en Y
Y-Front
- Deslice las varillas lineales / pieza trasera en Y a través de los cojinetes LM8UU y fije la pieza delantera en Y con un mazo de goma
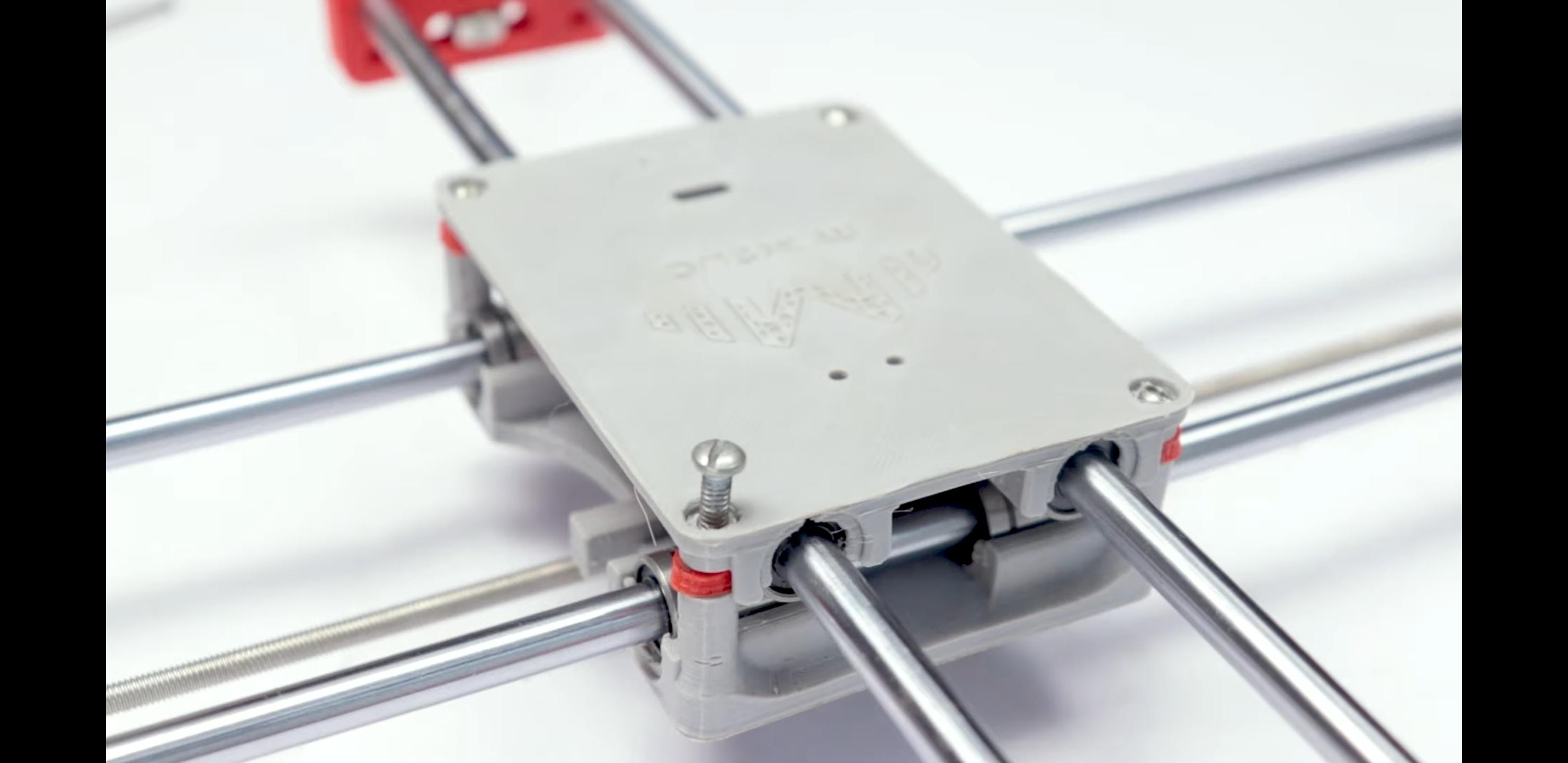
Paso 6:Ensamble el eje X-Y (cinturón)
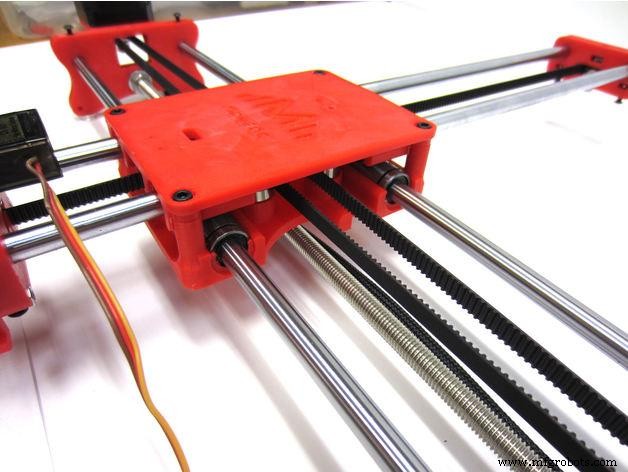

- Use un par de alicates de punta fina para ayudar a guiar el cinturón GT2 más fácilmente a través de la cubierta
- Tome los dos extremos del cinturón y deslícelos a través de los "dientes" en el control deslizante de la base
- El cinturón debe estar apretado y no suelto
- Tenga en cuenta que una vez que el cinturón GT2 está puesto, es normal que la cubierta no se mueva con facilidad
Paso 7:ensamble el eje Z

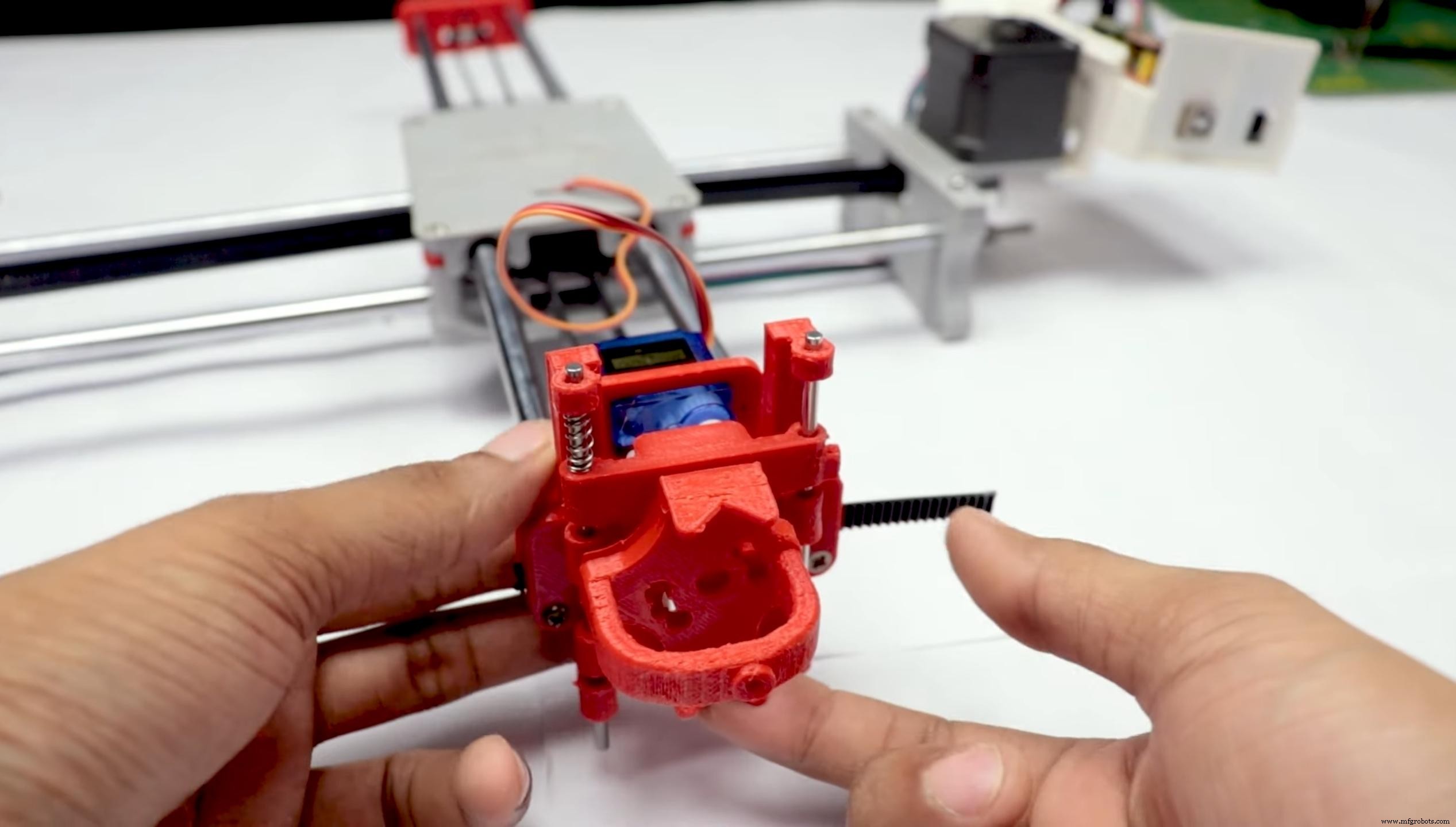
- Obtenga (2) varillas lineales de 3 mm y las siguientes piezas impresas en 3D (control deslizante, portalápices, deslizador de base, tornillo de pulgar métrico de 3 mm)
- Obtenga (1) tornillo hexagonal M3-0,5 x 20 mm y el tornillo de pulgar métrico y júntelos. Use superglue para mantenerlo unido.
- Obtenga (3) tornillos M3-0.5 x 16 mm que usará para asegurar la base deslizante a la parte frontal en Y. Es posible que deba usar (3) tuercas M3-0.5 para mantenerlo en su lugar
- Empuje el control deslizante y el portalápices juntos para hacer una sola pieza
- Ahora tome esa pieza nueva y las (2) varillas lineales de 3 mm y deslice las varillas a través de los orificios. Coloque un pequeño resorte entre las dos partes para que haya un poco de presión para levantar el control deslizante. Es posible que deba cortar un poco el resorte hasta que haya una cantidad adecuada de presión sobre el control deslizante.
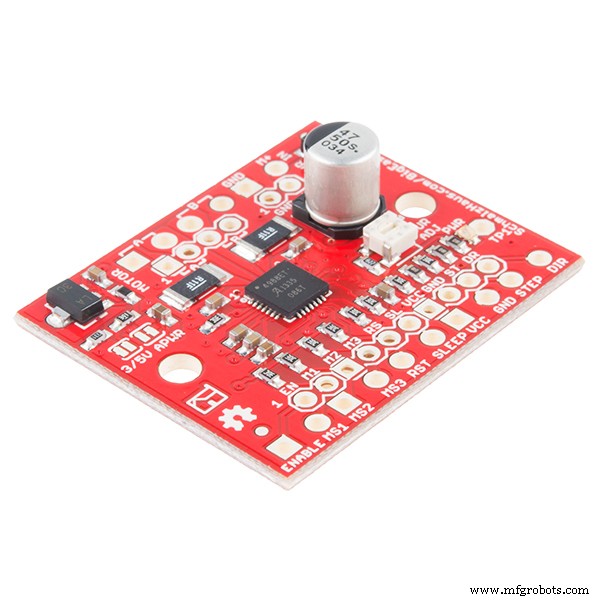
Paso 8:ELECTRÓNICA
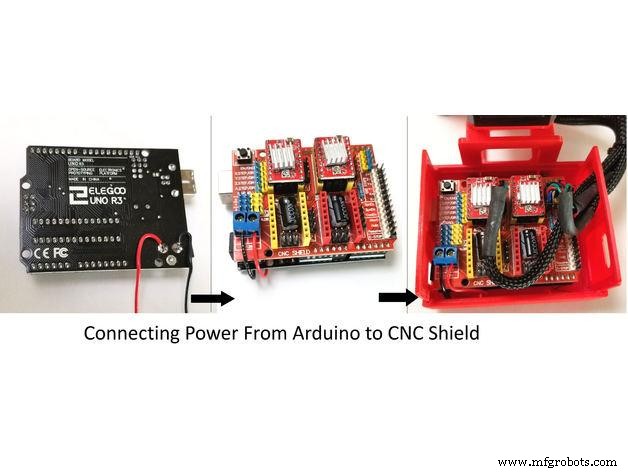
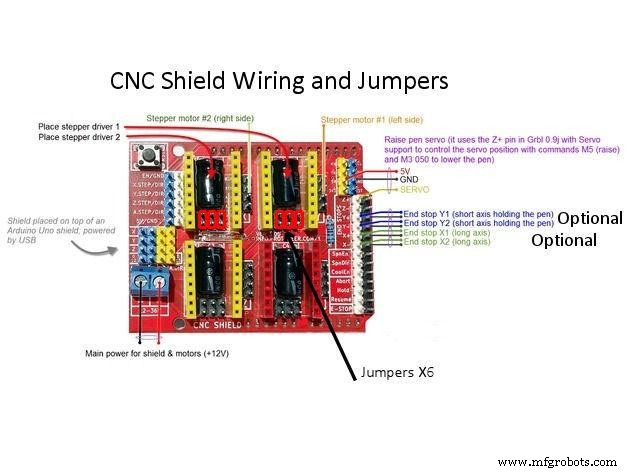

ELECTRÓNICA
Prefiero que puedas usar Arduino uno CNC Shield
Listo para todo tu circuito
1) Controlador de motor paso a paso A4988 de 4 piezas
2) Controlador de la placa de expansión A4988
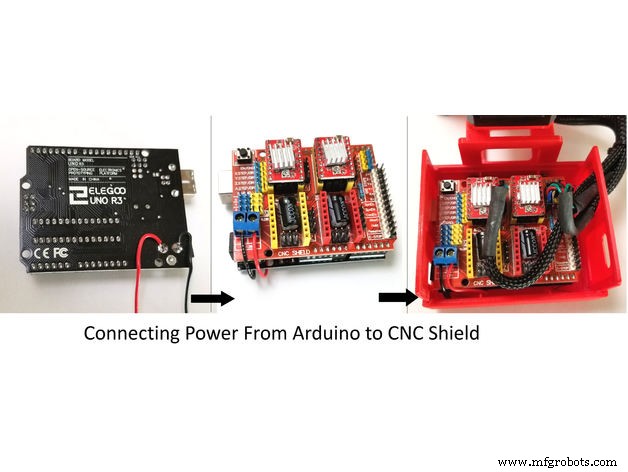
3) Arduino UNO En primer lugar, presione el fregadero y pegue el controlador del motor A4988.
El controlador de motor paso a paso A4988 de 4 piezas se conecta en la placa de expansión Módulo de controlador A4988, luego conecta el arduino con la placa de expansión y conecta todo el cableado El escudo también tiene un control de micro pasos incorporado, lo que significa que en lugar de usar pasos completos o medios pasos como un gran CNC haríamos, podemos hacer que los motores se muevan 1/16 o 1/32 de paso para hacer que el láser se mueva con la máxima precisión posible. Sin embargo, los motores consumirán más electricidad:se calentarán más rápido.
Para usar los modos de micropasos, acorte algunos de los pines de modo juntos. Diferentes combinaciones dan diferentes resoluciones. Eche un vistazo a la tabla para ver las diferentes configuraciones posibles. Cuando el blindaje esté programado, agréguele los controladores A4988 y conecte el resto de los componentes electrónicos.
Para encontrar las bobinas de los motores paso a paso, use un multímetro. Si hay resistencia entre los dos cables, tienes una bobina. En el esquema, las bobinas están representadas por dos cables del mismo color.
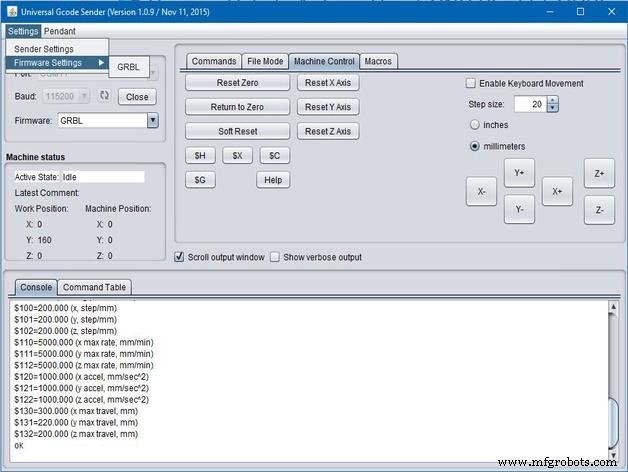
Paso 9:SOFTWARE
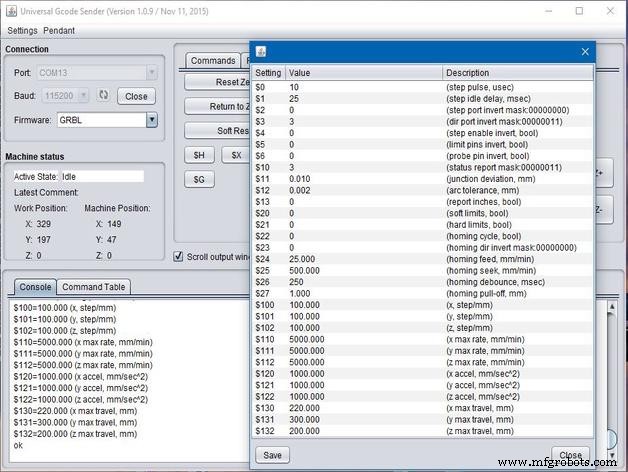
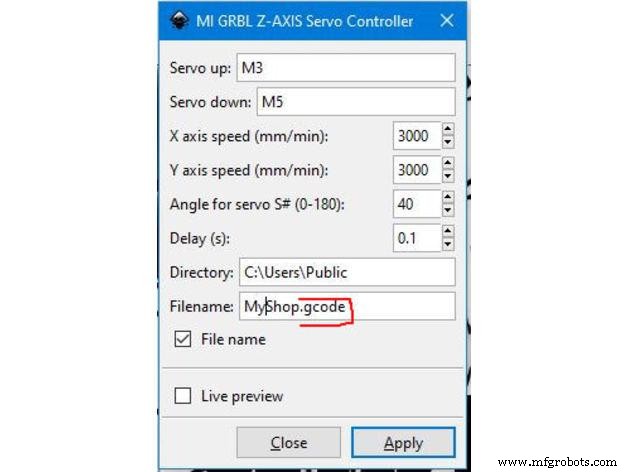
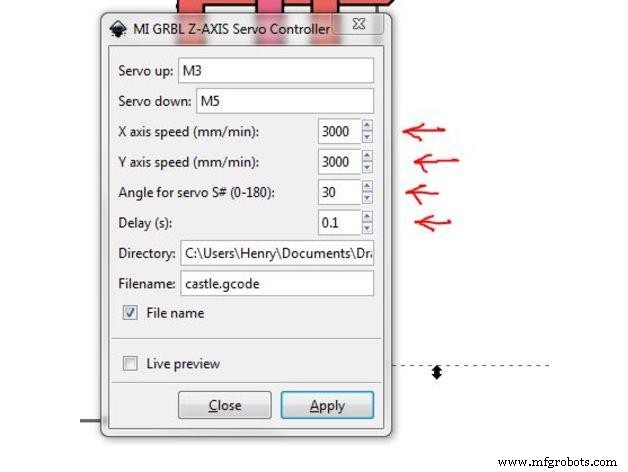
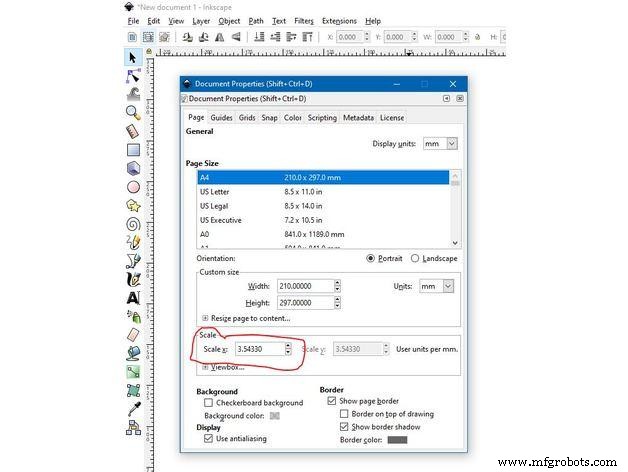
Inkscape, que es el software de diseño de gráficos (dibujar o importar gráficos)
Extensión Inkscape MI GRBL (convierte gráficos a código G) Remitente de código G universal (envía el código G al robot que provoca el movimiento de dibujo) GRBL, que es el firmware de Arduino (programado en Arduino Uno)
Arduino:https://www.arduino.cc/en/software
Remitente universal de código G:https://winder.github.io/ugs_website / ...
Inkscape:https://inkscape.org/release/inkscape ..
Láser 4xiDraw y km:https://drive.google.com/file/d/1YO8 -...
Procesamiento:https://processing.org/download/
dibujo al procesamiento de código G:https://drive.google.com/file/d/1PIFx ...
ver video para la configuración completa
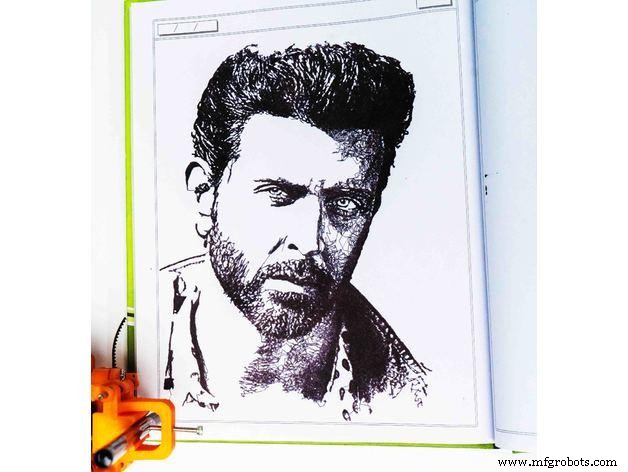
Paso 10:máquina de dibujo en el trabajo
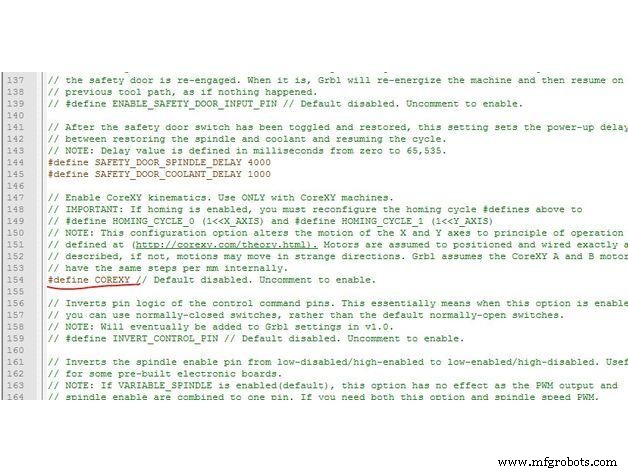
Código
- código grbl
código grbl Arduino
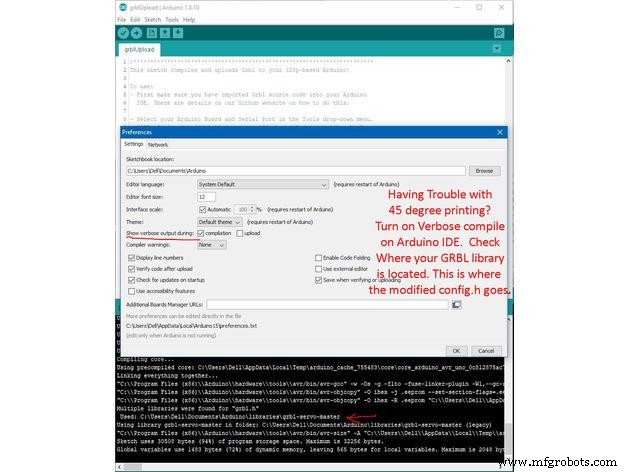
/ ******************************************** ************************* ¡Este boceto compila y carga Grbl en su Arduino basado en 328p! Para usar:- Primero asegúrese de haber importado el código fuente de Grbl en su IDE de Arduino. Hay detalles en nuestro sitio web de Github sobre cómo hacer esto.- Seleccione su placa Arduino y puerto serie en el menú desplegable Herramientas. NOTA:Grbl solo admite oficialmente Arduinos basados en 328p, como el Uno. ¡Es probable que el uso de otros tableros no funcione! - Luego, simplemente haga clic en 'Cargar'. ¡Eso es todo! Para usuarios avanzados:si desea ver qué más puede hacer Grbl, hay algunas opciones adicionales de personalización y funciones que puede habilitar o deshabilitar. Navegue por su sistema de archivos hasta donde Arduino IDE ha almacenado los archivos de código fuente Grbl, abra el archivo 'config.h' en su editor de texto favorito. Dentro hay docenas de descripciones de funciones y #defines. Simplemente comente o descomente los #defines o modifique sus valores asignados, guarde los cambios y luego haga clic en 'Cargar' aquí. Copyright (c) 2015 Sungeun K. Jeon Publicado bajo la licencia MIT. Consulte license.txt para obtener más detalles. ***************************************** **************************** / # include// ¡No modifique este archivo!
Esquemas
Proceso de manufactura
- Robot seguidor de línea
- Plataforma de entrenamiento Arduino
- Robot asistente doméstico autónomo
- Máquina CNC
- Brazo de robot Arduino DIY:controlado por gestos con las manos
- Monitor de casa
- Cómo hacer un mini osciloscopio en casa usando Arduino Nano
- Idea de bricolaje con RFID
- Máquina de garras casera
- Trazador CNC Arduino (máquina de dibujo)
- WARAN - Automatización del hogar